
A Robust Reweighted L1-Minimization Imaging Algorithm for Passive Millimeter Wave SAIR in Near Field

Abstract
:1. Introduction
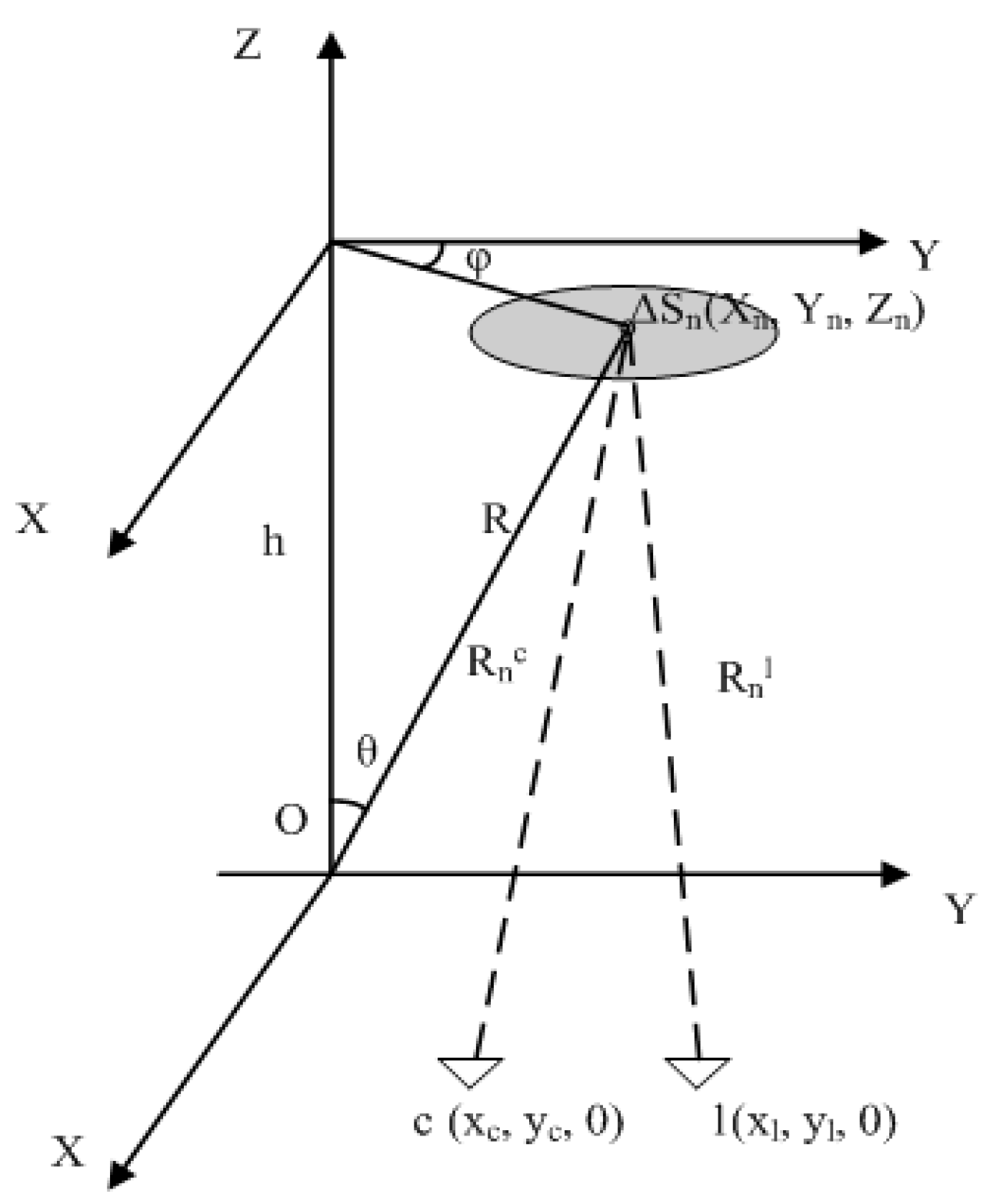
2. Model of Passive Millimeter Wave SAIR Imaging in Near Field

3. The Basic CS Approach Applied to SAIR
3.1. Principles of CS
3.2. The Basic CS Approach to SAIR
4. Robust Reweighted L1-Minimization Imaging Algorithm
4.1. Signal Model of RRIA
4.2. Sparse Inversion of RRIA

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | |
|---|---|
| Algorithm: | Step 1: ; |
| Step 2: calculate according to Equation (7); | |
| Step 3: update by using Equation (26); ; | |
| Step 4: if , repeat Step 3;otherwise ; | |
| Step 5: if , update by using Equation (27), set , go to Step 3; otherwise go to Step 6; | |
| Step 6: calculate by | |
| Output |
5. Experiments
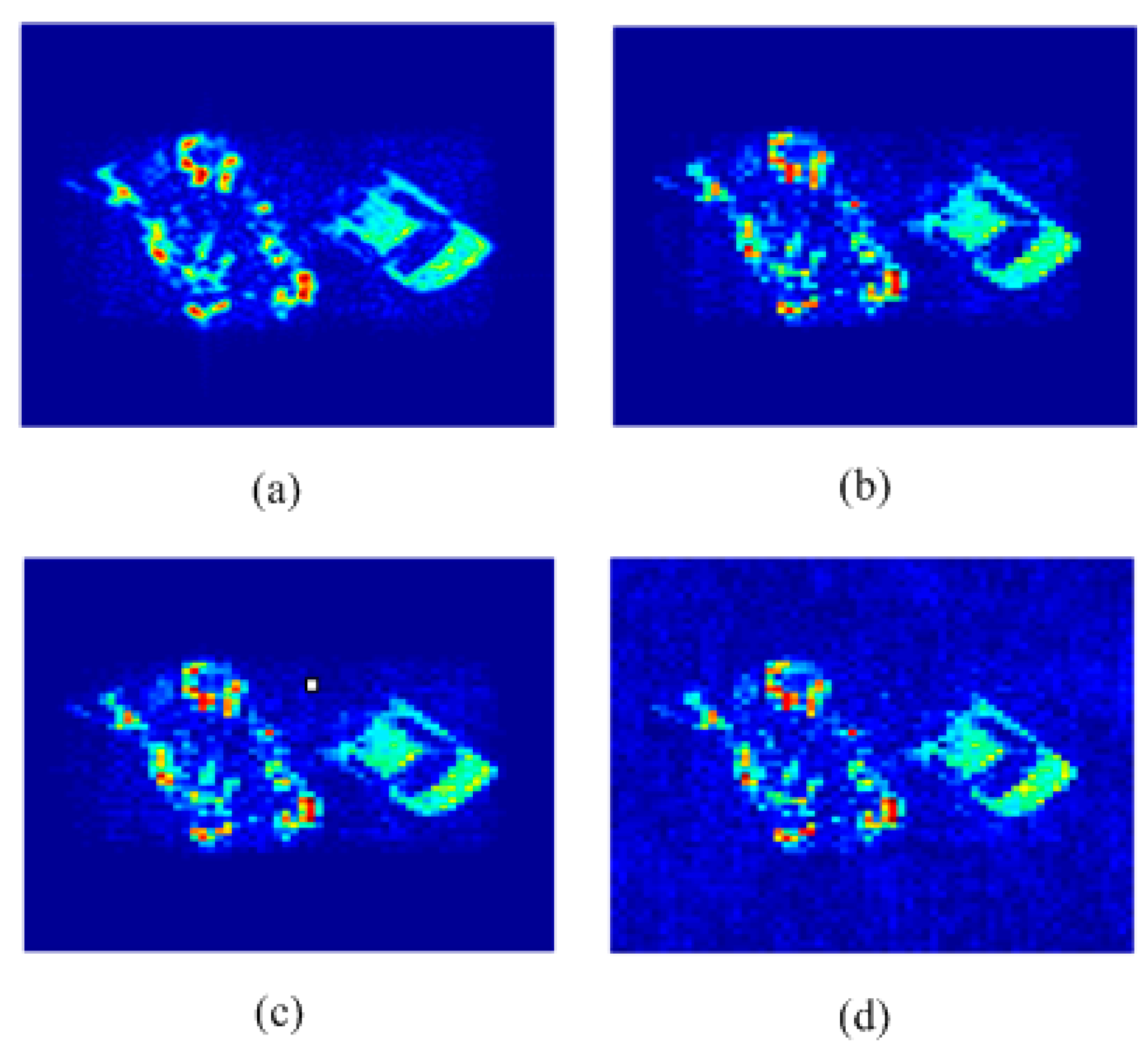
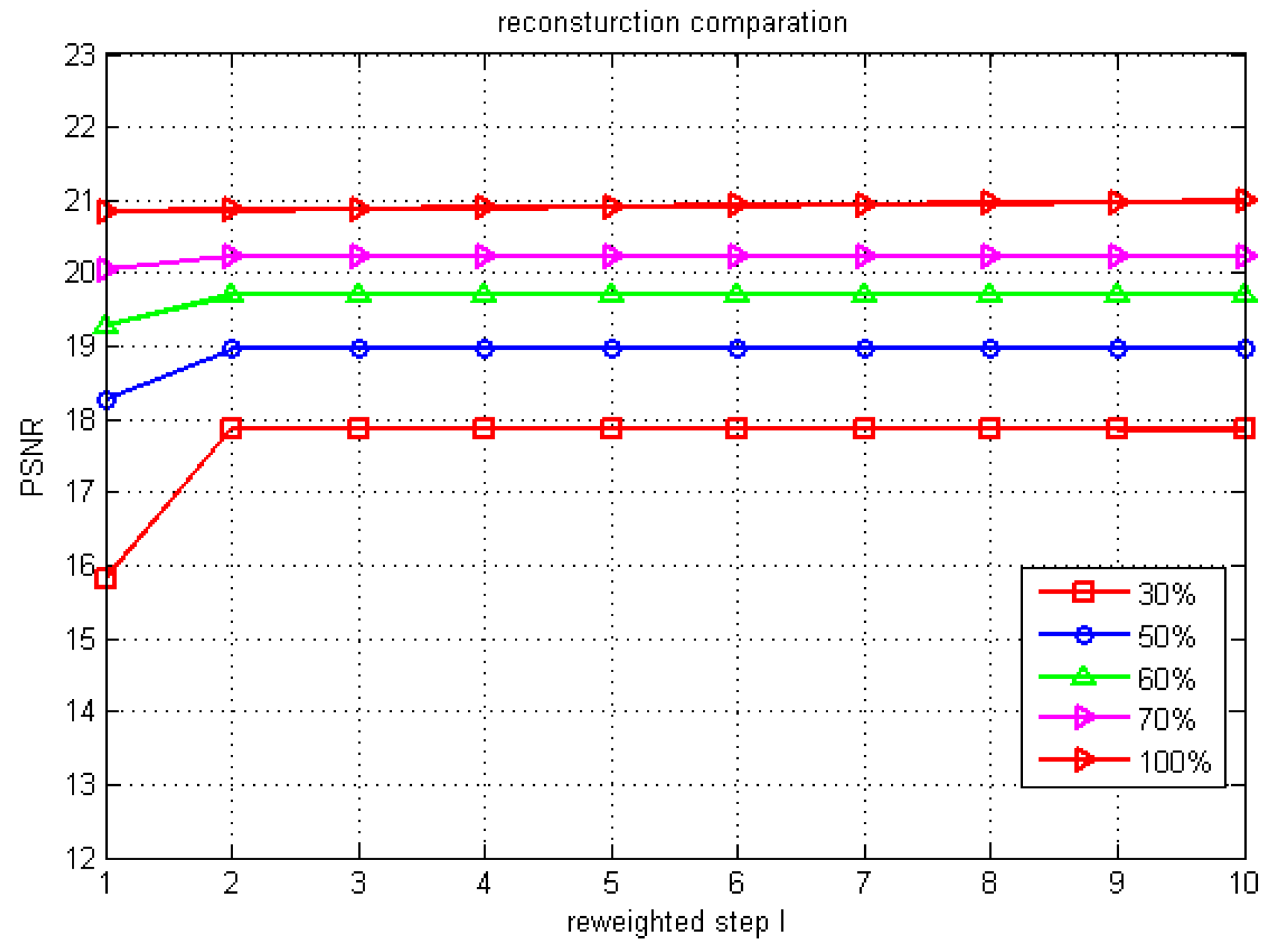
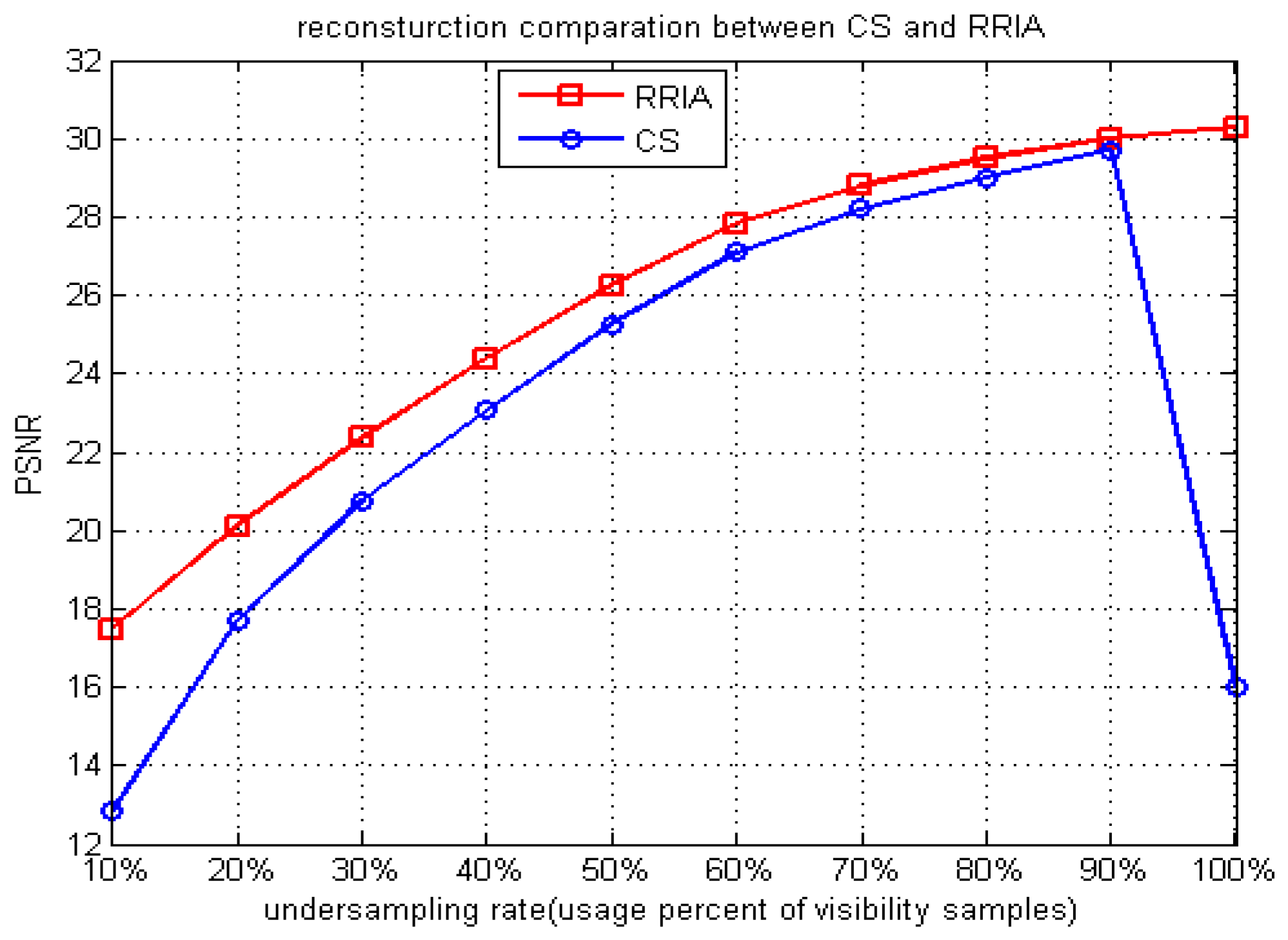
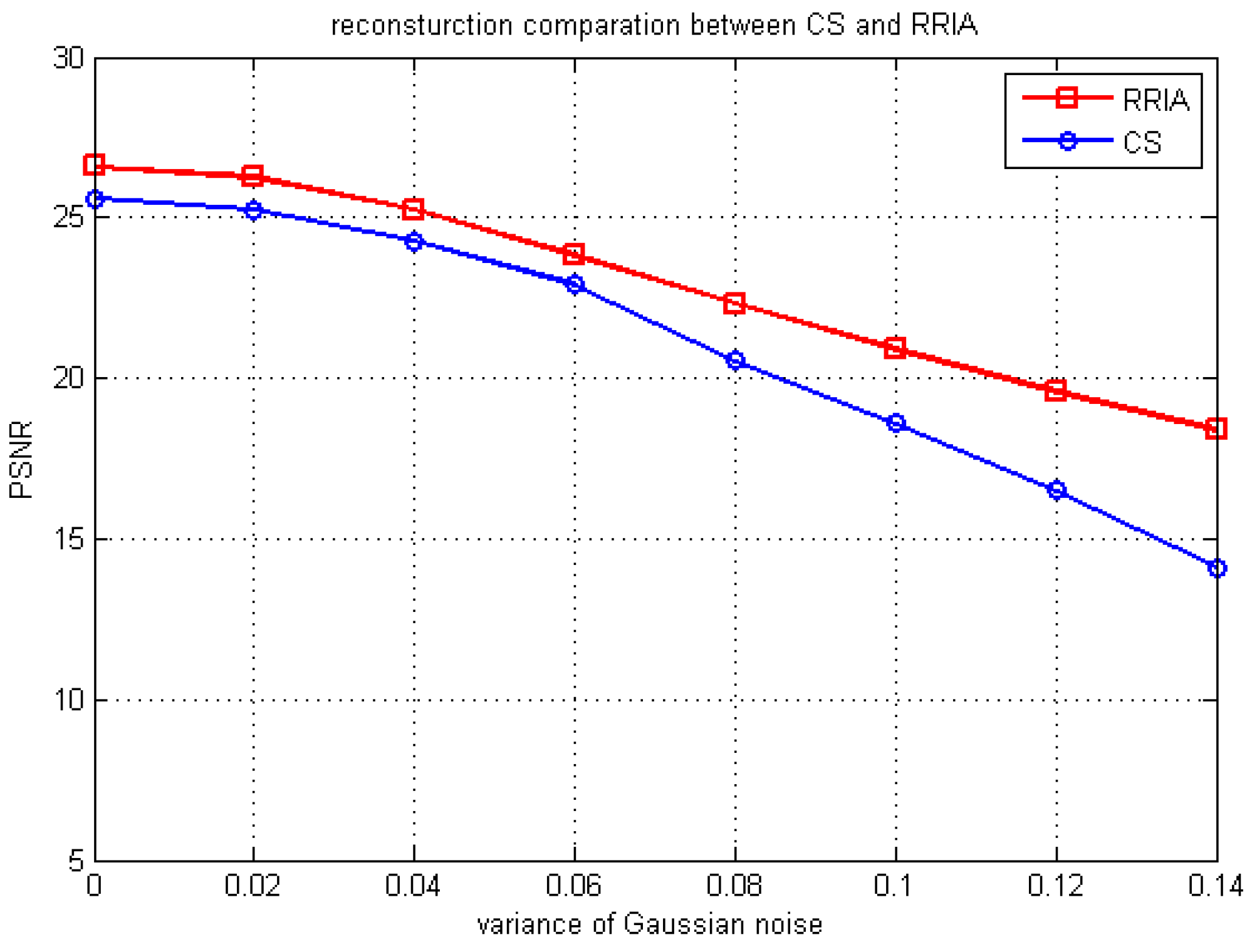
5.1. Simulation Comparison

| Simulation Parameters | Value |
|---|---|
| Center frequency | 52.8 GHz |
| Image pixel size | 64 × 64 |
| value of image | 0~1 |
| Image distance | 150 m |
| Antenna array | 140 |
| Entire G size | 2500 × 4096 |
| Visibility function samples | 50 × 50 |


| Undersampling Rate | 50% | 60% | 70% | 80% |
|---|---|---|---|---|
| tCS | 21.36s | 58.4s | 141.5s | 371.1s |
| tRRIA | 72.7s | 210.3s | 466.8s | 1261.5s |
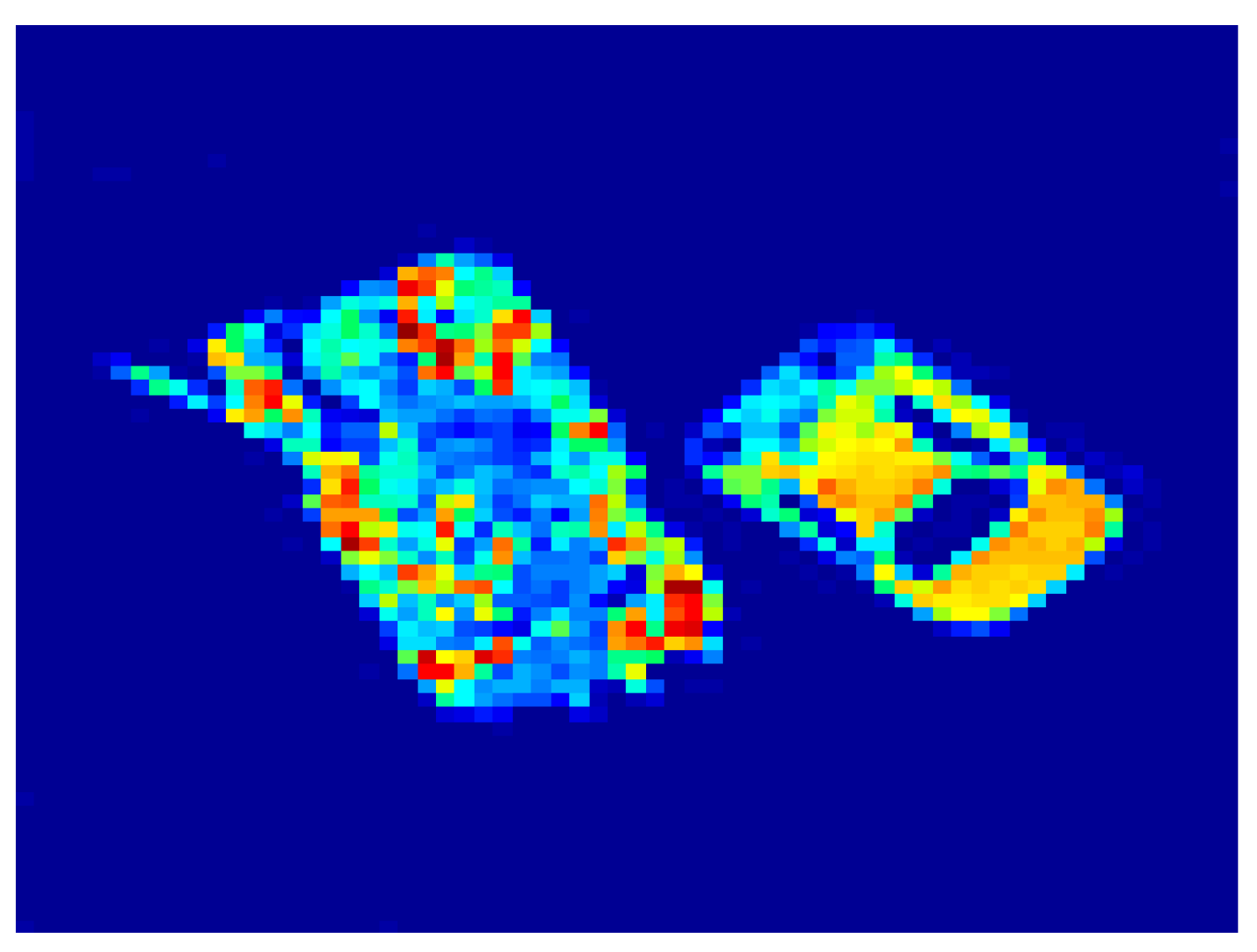
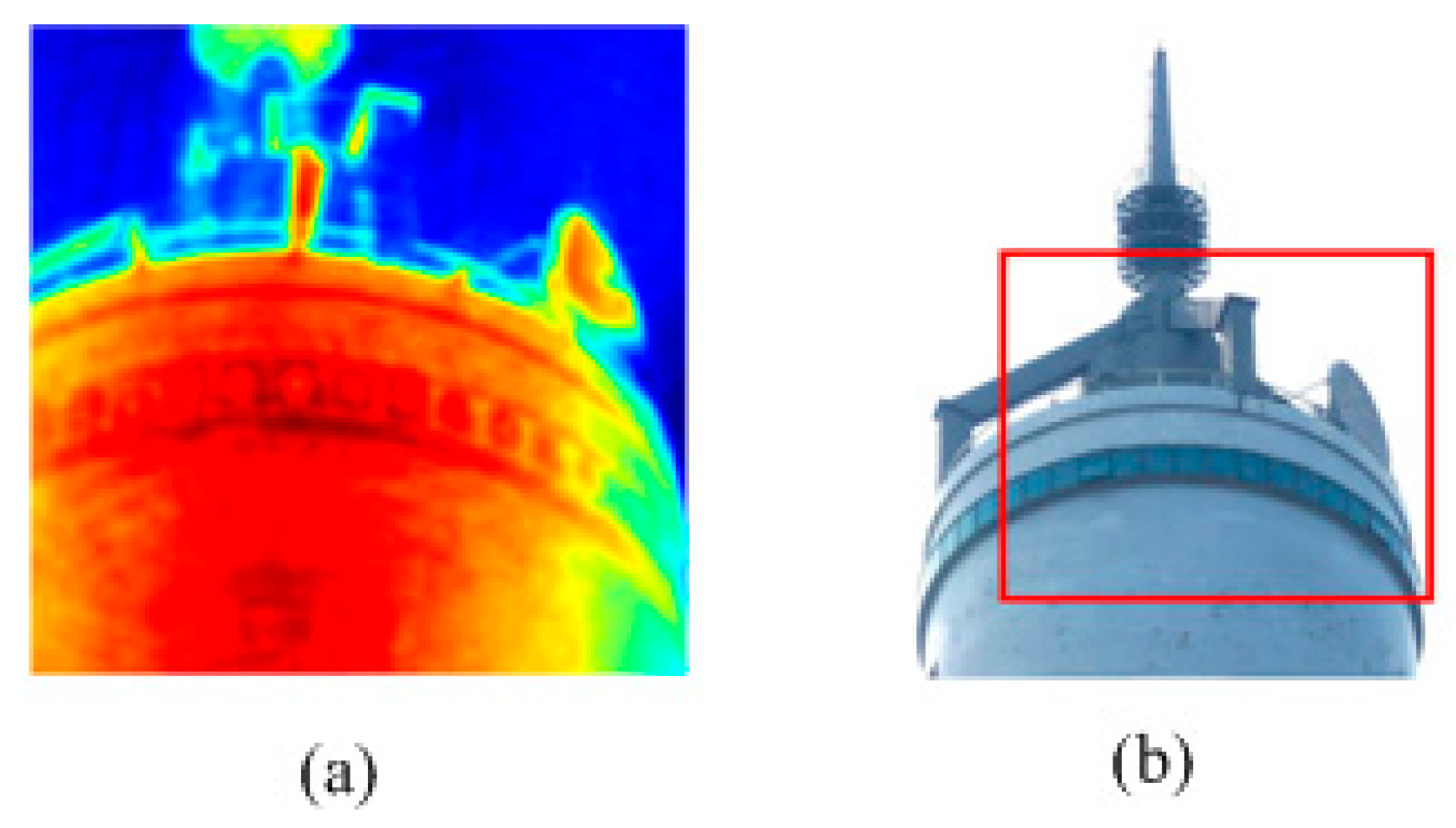
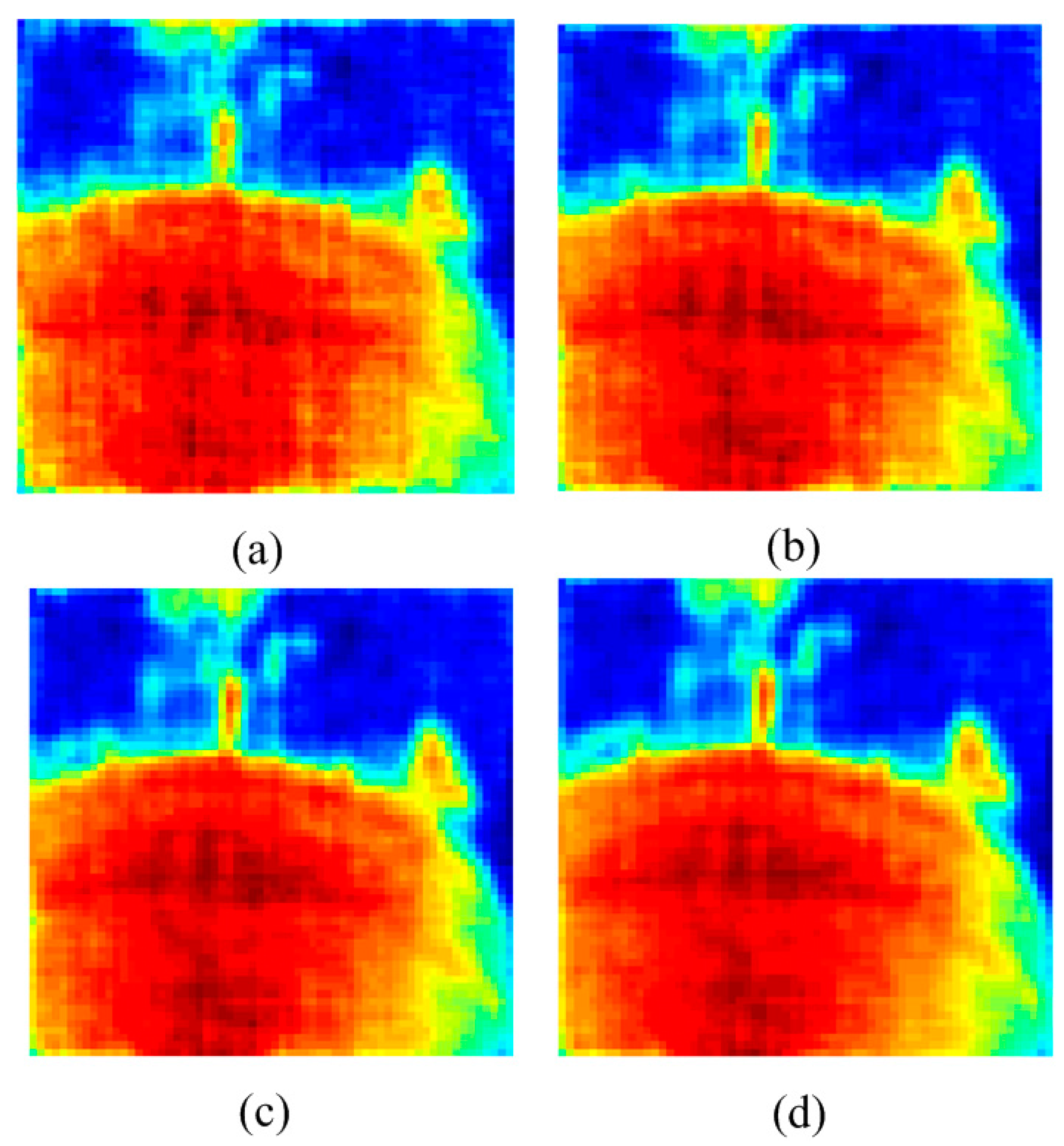
5.2. Application to Real SAIR Data




6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Tanner, A.B.; Wilson, W.J.; Lambrigsten, B.H. Initial Results of the Geosynchronous Synthetic Thinned Array Radiometer. In Proceedings of the IGARSS, Denver, CO, USA, 31 July–4 August 2006; pp. 3968–3971.
- England, A.W.; Pham, H.; Roo, R.D. Performance of STAR-Light receivers during CLPX. In Proceedings of the IGARSS, Toulouse, France, 21–25 July 2003; Volume 2, pp. 1235–1237.
- Xue, Y.; Miao, J.G. Development of the disk antenna array aperture synthesis millimeter wave radiometer. In Proceedings of the IEEE ICMMT, Nanjing, China, 21–24 April 2008; Volume 2, pp. 806–809.
- Candes, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar]
- Ren, X.Z.; Li, Y.F.; Yang, R. Four-dimensional SAR imaging scheme based on compressive sensing. Prog. Electromagn. Res. B 2012, 39, 225–239. [Google Scholar] [CrossRef]
- Li, S.Y.; Zhou, X.; Ren, B.L. A Compressive Sensing Approach for Synthetic Aperture Imaging Radiometers. Prog. Electromagn. Res. 2013, 135, 583–599. [Google Scholar] [CrossRef]
- Joshi, M.; Jalobeanu, A. MAP estimation for multiresolution fusion in remotely sensed images using an IGMRF prior model. IEEE Trans. Geosci. Remote Sens. 2010, 48, 1245–1255. [Google Scholar] [CrossRef]
- Goldstein, T.; Osher, S. The split Bregman method for l1 regularized problems. SIAM J. Imaging Sci. 2009, 2, 323–343. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Super-resolution power and robustness of compressive sensing for spectral estimation with application to spaceborne tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Bouali, M.; Ladjal, S. Toward optimal destriping of MODIS data using a unidirectional variational model. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2924–2935. [Google Scholar] [CrossRef]
- Candes, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted l1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Shen, F.F.; Zhao, G.H.; Shi, G.M. Compressive SAR Imaging with Joint Sparsity and Local Similarity Exploitation. Sensors 2015, 15, 4176–4192. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y.; Yan, L.X.; Fang, H.Z. Simultaneous Destriping and Denoising for Remote Sensing Images with Unidirectional Total Variation and Sparse Representation. IEEE Trans. Geosci. Remote Sen. Lett. 2014, 11, 1051–1055. [Google Scholar] [CrossRef]
- Anterrieu, E.; Khazaal, A. Brightness Temperature Map Reconstruction from Dual-Polarimetric Visibilities in Synthetic Aperture Imaging Radiometry. IEEE Trans. Geosci. Remote Sens. 2008, 46, 606–612. [Google Scholar] [CrossRef]
- Ramos-Perez, I.; Camps, A.; Bosch-Lluis, X. PAU-SA: A Synthetic Aperture Interferometric Radiometer Test Bed for Potential Improvements in Future Missions. Sensors 2012, 12, 7738–7777. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ramos-Perez, I.; Forte, G.F.; Camps, A. Calibration, performance, and imaging tests of a fully digital synthetic aperture interferometer radiometer. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 723–734. [Google Scholar] [CrossRef]
- Tanner, A.; Lambrigsten, B.; Gaier, T. Near field characterization of the GeoSTAR demonstrator. In Proceeding of the IGARSS, Denver, CO, USA, 31 July–4 August 2006; pp. 2529–2532.
- Chen, J.F.; Li, Y.H.; Wang, J.Q. Regularization Imaging Algorithm with Accurate G Matrix for Near-Field MMW Synthetic Aperture Imaging Radiometer. Prog. Electromagn. Res. B 2014, 58, 193–203. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Lai, M.J.; Xu, Y.; Yin, W. Improved iteratively reweighted least squares for unconstrained smoothed lq minimization. SIAM J. Numer. Anal. 2013, 5, 927–957. [Google Scholar] [CrossRef]
- Ma, P.F.; Lin, H.; Lan, H.X. On the Performance of Reweighted L1 Minimization for Tomographic SAR Imaging. IEEE Trans. Geosci. Remote Sen. Lett. 2015, 12, 895–899. [Google Scholar] [CrossRef]
- Camps, A.; Vall-llossera, M.; Corbella, I. Improved image reconstruction algorithms for aperture synthesis radiometers. IEEE Trans. Geosci. Remote Sens. 2008, 46, 146–158. [Google Scholar] [CrossRef]
- Tanner, A.B.; Swift, C.T. Calibration of a Synthetic Aperture Radiometer. IEEE Trans. Geosci. Remote Sens. 1993, 31, 257–267. [Google Scholar] [CrossRef]
- Courrieu, P. Fast Computation of Moore-Penrose Inverse Matrices. Neural Inf. Process. Lett. Rev. 2005, 8, 25–29. [Google Scholar]
- Colliander, A.; Torres, F.; Corbella, I. Correlation Denormalization in Interferometric or Polarimetric Radiometers: A Unified Approach. IEEE Trans. Geosci. Remote Sens. 2008, 47, 561–568. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, H.; Wu, J. Imaging Analysis and First Results of the Geostationary Interferometric Microwave Sounder Demonstrator. IEEE Trans. Geosci. Remote Sen. 2015, 53, 207–218. [Google Scholar] [CrossRef]
- Zhang, Y.L.; Li, Y.H. A compressive regularization imaging algorithm for millimeter-wave SAIR. IEICE Trans. Inf. Syst. 2015, E98-D, 1609–1612. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Li, Y.; Zhu, S.; Li, Y. A Robust Reweighted L1-Minimization Imaging Algorithm for Passive Millimeter Wave SAIR in Near Field. Sensors 2015, 15, 24945-24960. https://0-doi-org.brum.beds.ac.uk/10.3390/s151024945
Zhang Y, Li Y, Zhu S, Li Y. A Robust Reweighted L1-Minimization Imaging Algorithm for Passive Millimeter Wave SAIR in Near Field. Sensors. 2015; 15(10):24945-24960. https://0-doi-org.brum.beds.ac.uk/10.3390/s151024945
Chicago/Turabian StyleZhang, Yilong, Yuehua Li, Shujin Zhu, and Yuanjiang Li. 2015. "A Robust Reweighted L1-Minimization Imaging Algorithm for Passive Millimeter Wave SAIR in Near Field" Sensors 15, no. 10: 24945-24960. https://0-doi-org.brum.beds.ac.uk/10.3390/s151024945