
A Vehicle Active Safety Model: Vehicle Speed Control Based on Driver Vigilance Detection Using Wearable EEG and Sparse Representation

 ,
,
Abstract
:1. Introduction
1.1. Driver Vigilance Detection Technologies
1.2. Vehicle Speed Control Algorithms after Driver Vigilance
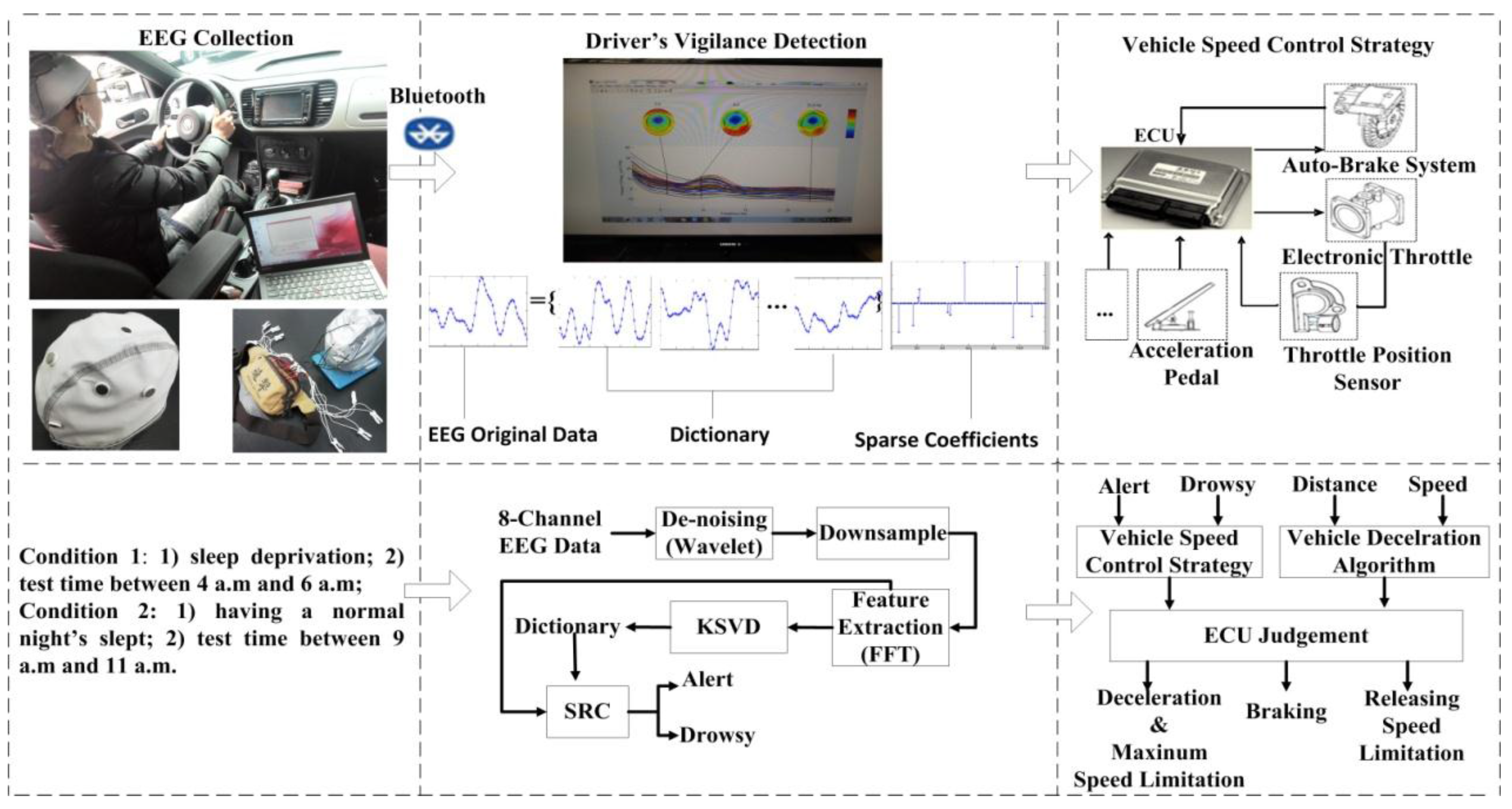
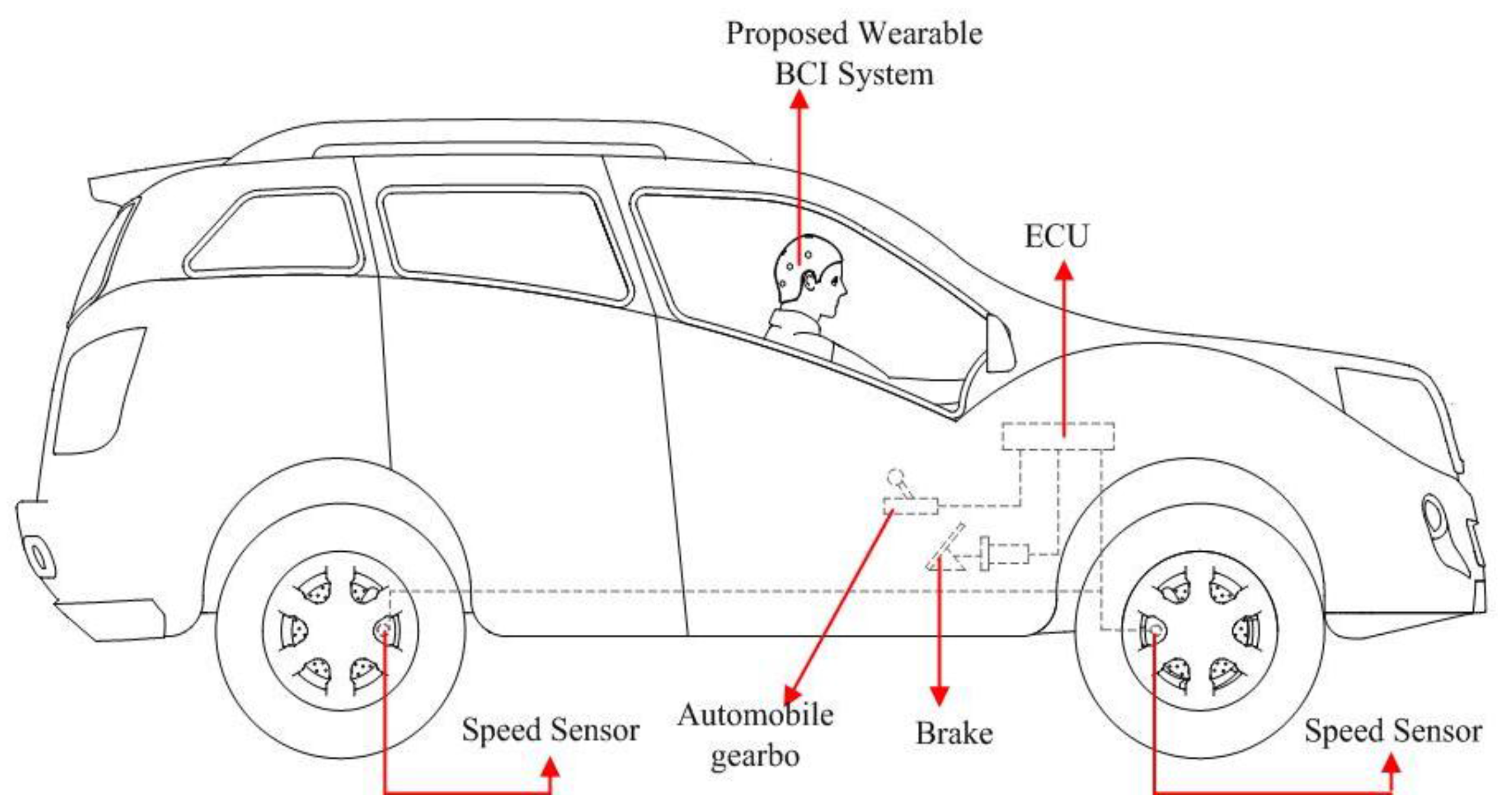
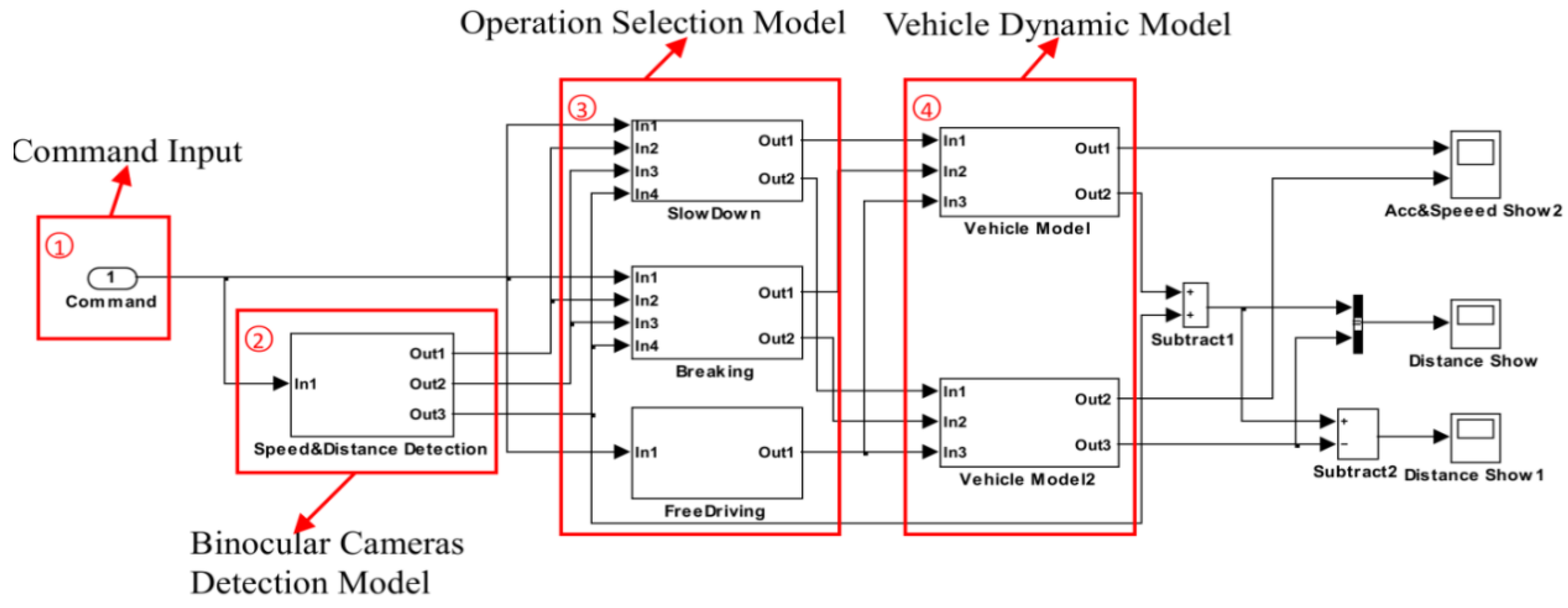
2. System Architecture
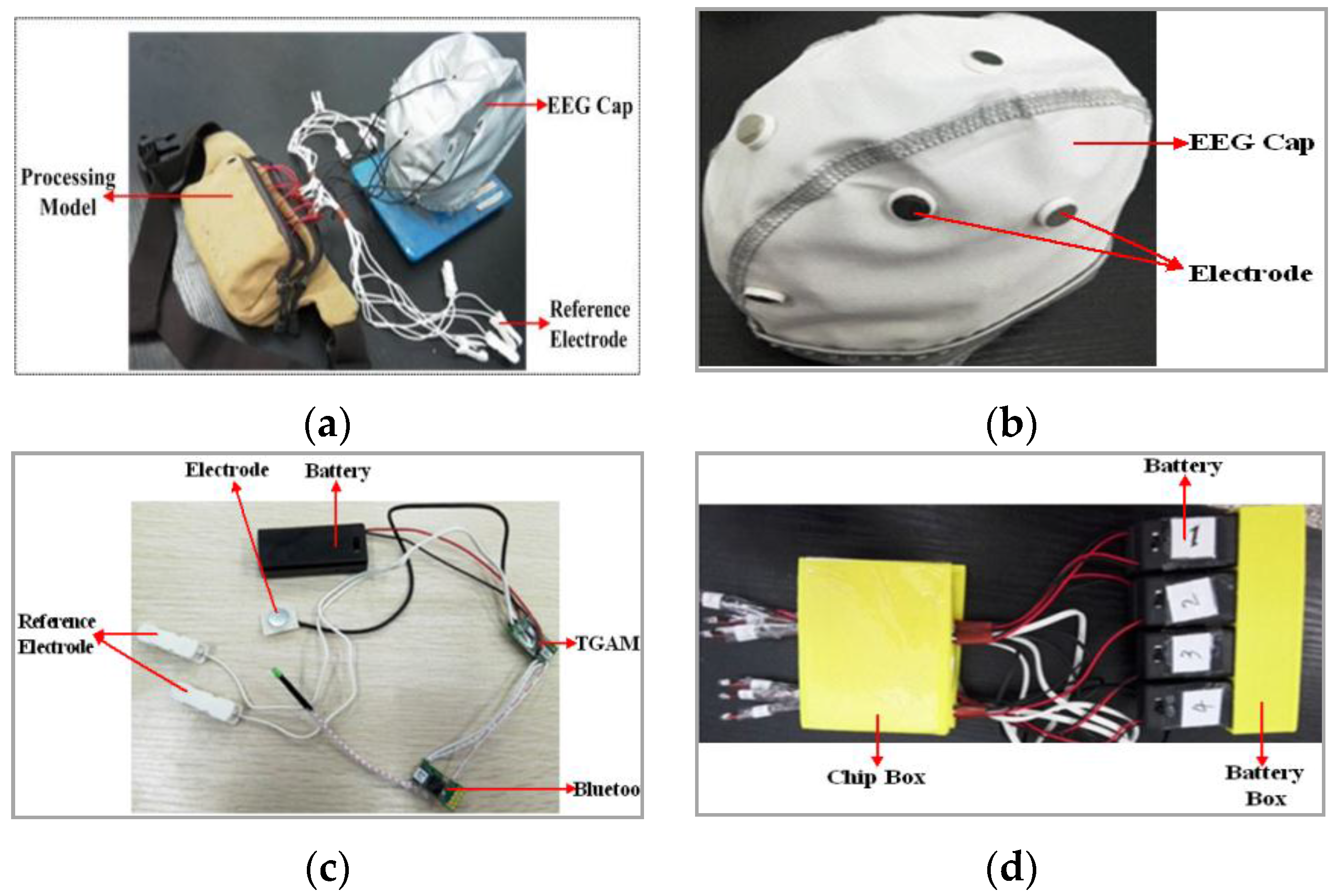
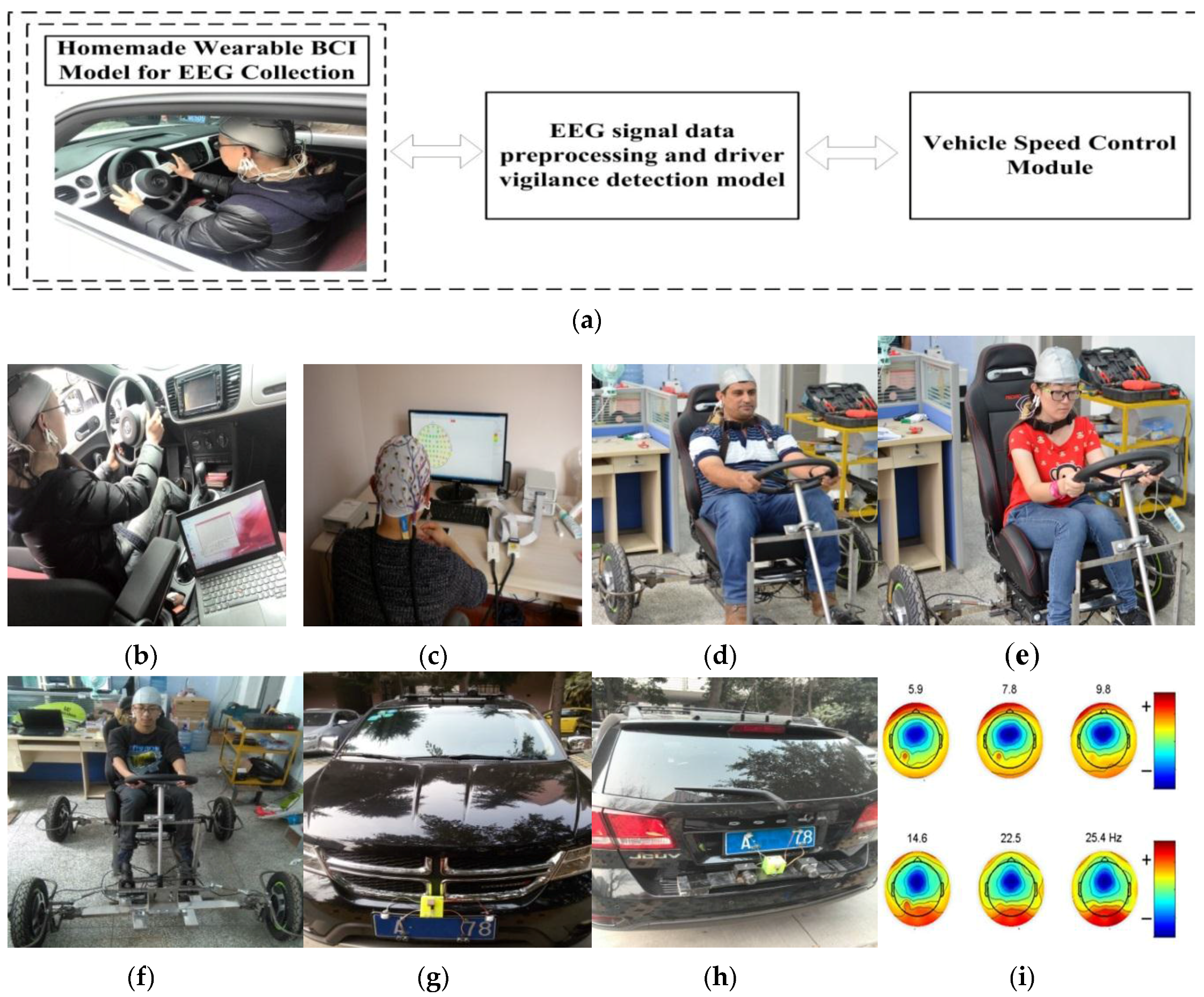
3. Wearable BCI System for EEG Collection
4. Driver Vigilance Detection
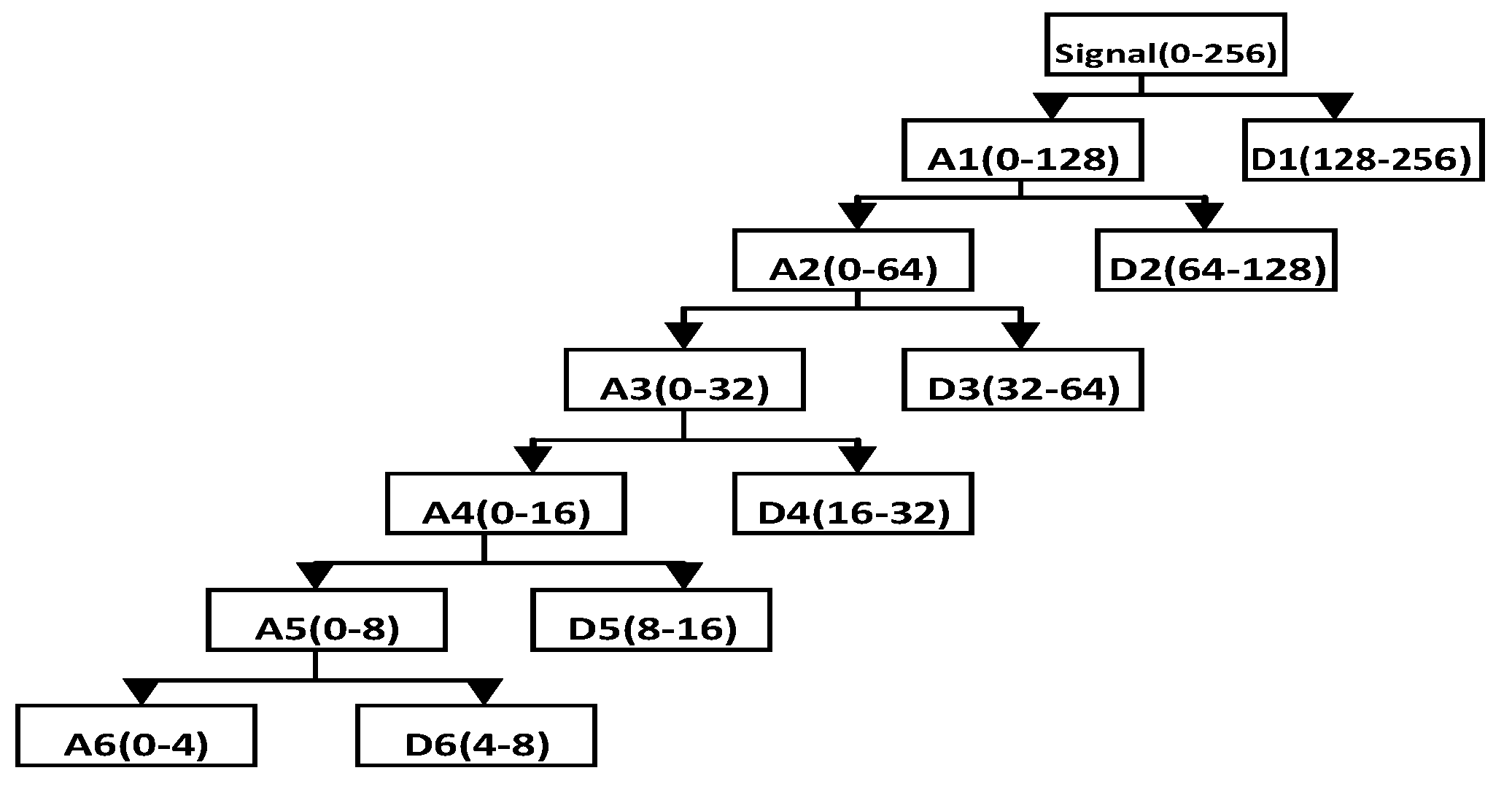
4.1. Data Preprocessing
4.2. Feature Extraction
4.3. Driver Vigilance Detection Based on Sparse Representation Classification Combined with KSVD
4.3.1. Sparse Representation
4.3.2. Dictionary
4.3.3. Sparse Representation Classification
5. Vehicle Speed Control Strategy
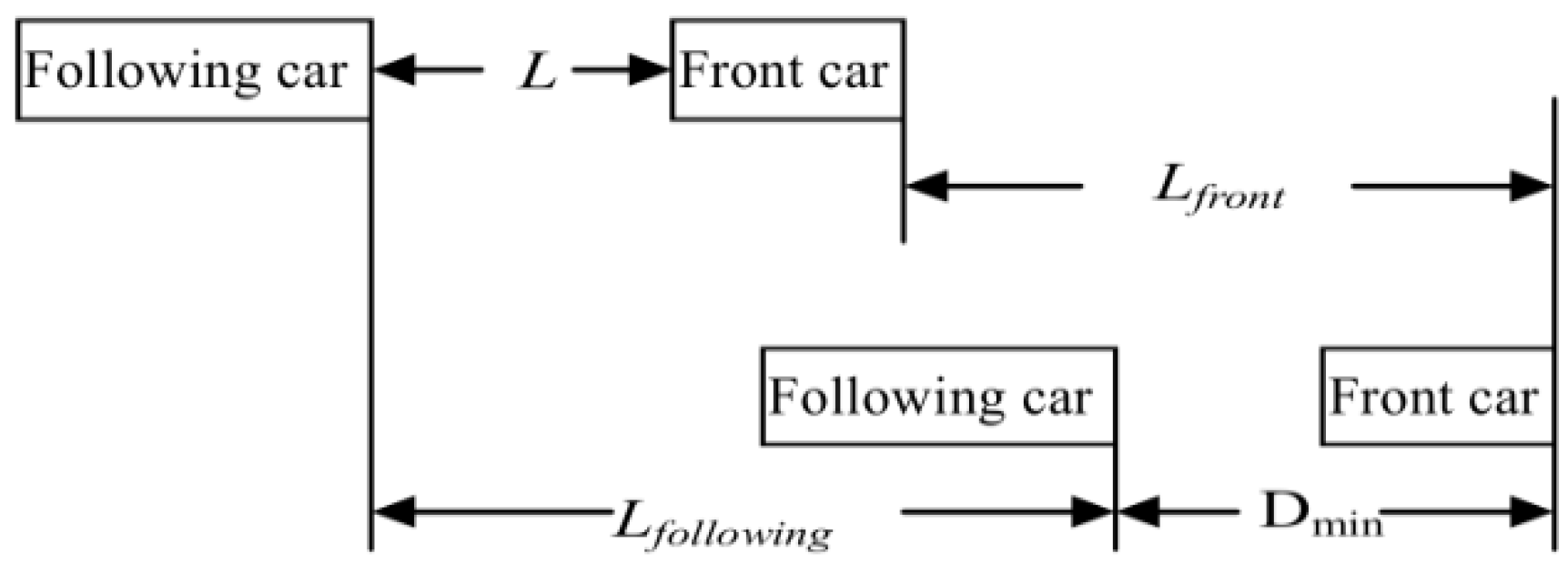
5.1. Vehicle Deceleration Algorithm
- t1: The driver reaction and brake coordination time of following vehicle;
- t2: The acceleration increase time of following vehicle;
- t3: The uniform deceleration time of following vehicle;
- tfollowing: The total time of following vehicle deceleration;
- v21: The initial speed of following vehicle;
- v22: The final velocity of following vehicle calculated by v12 = v21 − 20 Km/h;
- s1: The distance traveled by the following vehicle during t1;
- s2: The distance traveled by the following vehicle during t2;
- s3: The distance traveled by the following vehicle during t3;
- sfollowing: The distance traveled by the following vehicle during the whole process;
- am: The maximum accelerometer of the following vehicle;
- v11: The initial speed of the front vehicle;
- v12: The final velocity of front vehicle calculated by v12 = v21 − 20 Km/h;
- af : The accelerometer of the front vehicle;
- Dmin: The minimum safety distance of the front-following vehicle after deceleration;
- L: The needed distance of front-following vehicle before deceleration; and
- sfront: The distance traveled by the front vehicle during the whole process.
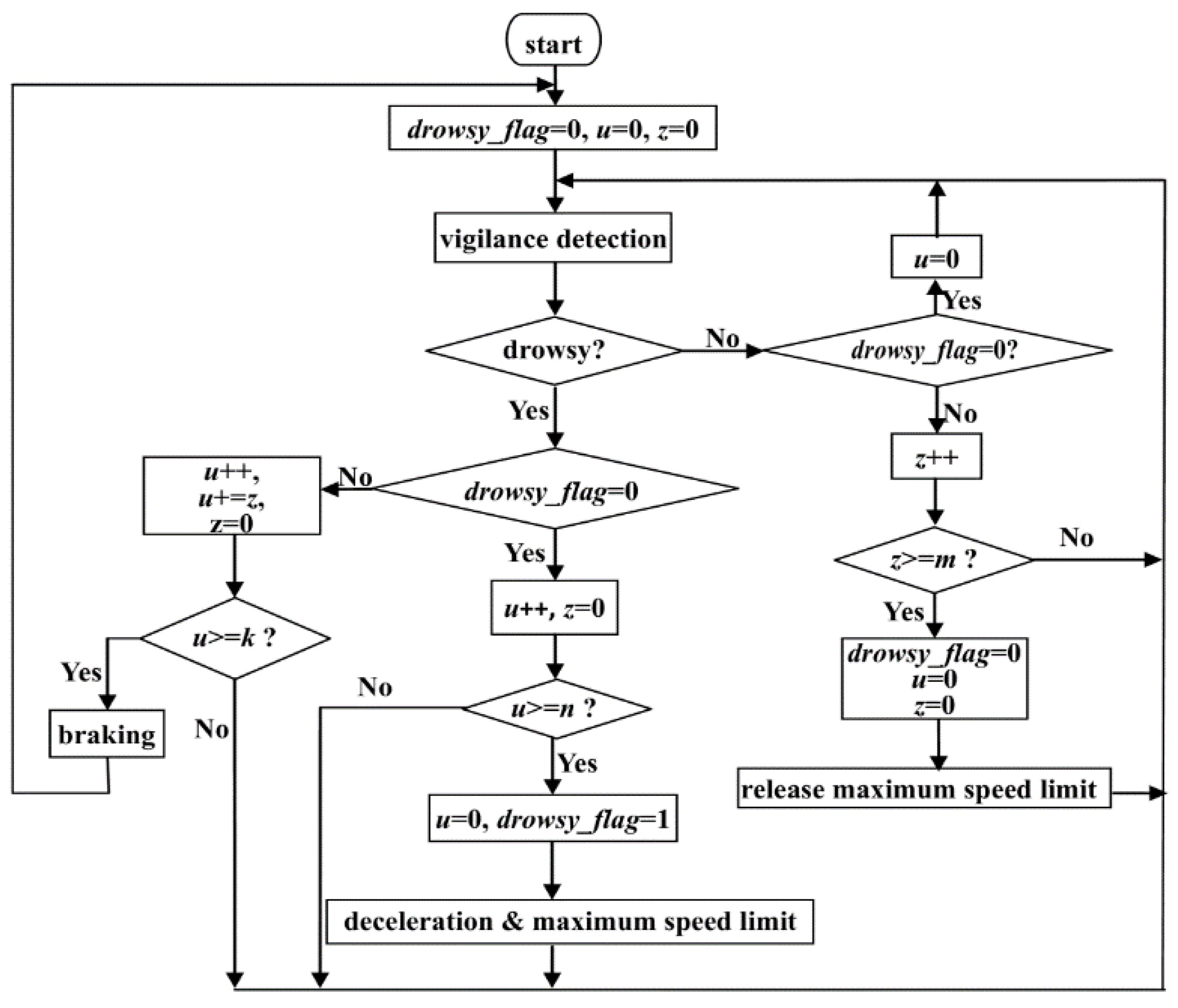
5.2. Vehicle Speed Control Strategy
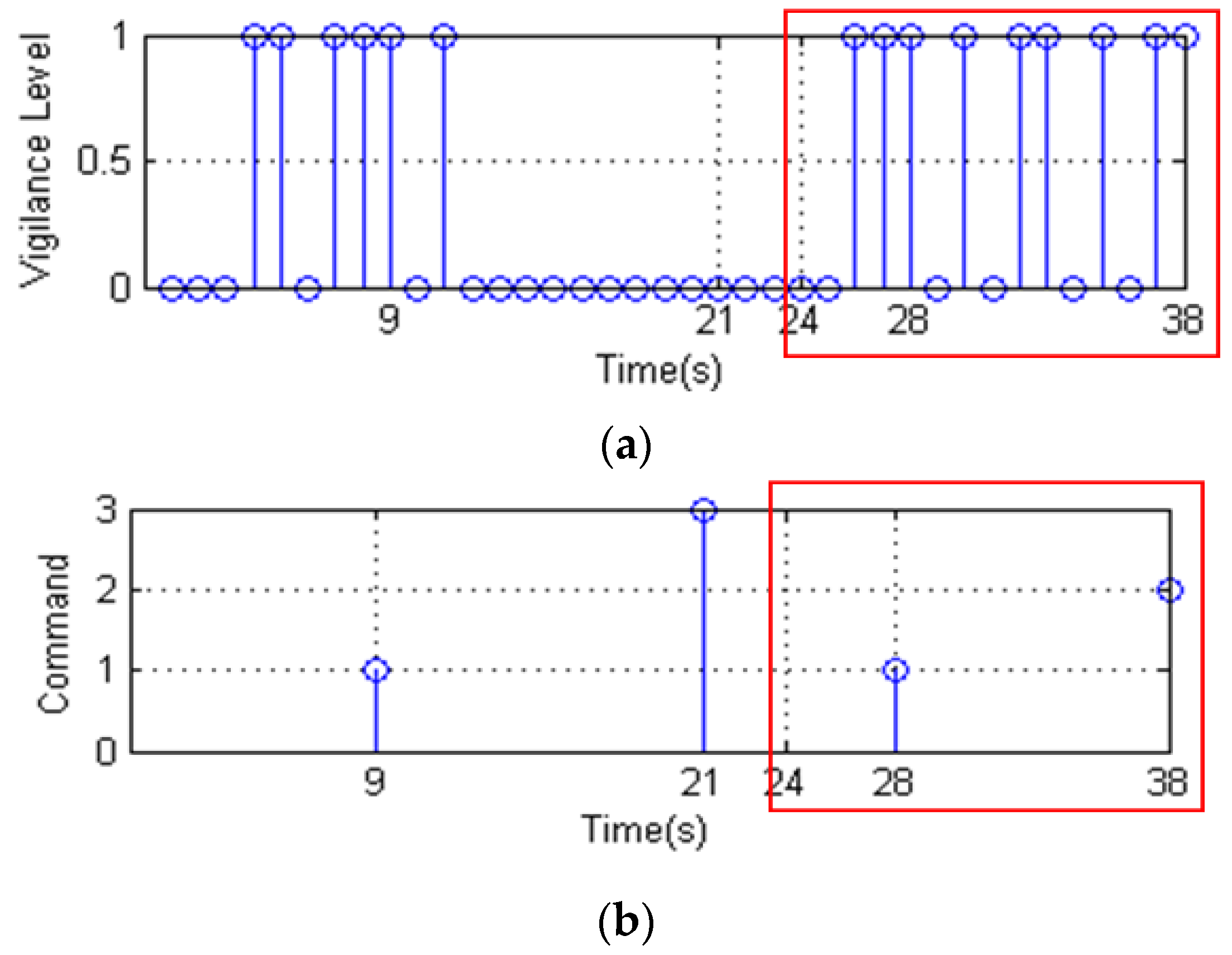
- Situation 1: If the driver is detected to be drowsy for a constant n s, the driver is regarded as drowsy and the “deceleration” command is sent to the ECU. In this paper, the parameter n is variable according to different conditions, and we set n at 3 s in our experimental and simulation system.
- Situation 2: After Situation 1, if the driver is detected to be not completely alert in next u + z s (z is the time after u. u ≤ k, z < m, and u + z ≥ k), the driver is regarded as very drowsy and the “braking” command is sent to the ECU in Figure 6.
- Situation 3: After Situation 1, if the driver is detected to be not completely alert in the next u s but alert in m s after u (u ≤ k), the driver is regarded as awake and the “releasing maximum speed limit” command is sent to ECU.
6. System Simulation and Validation
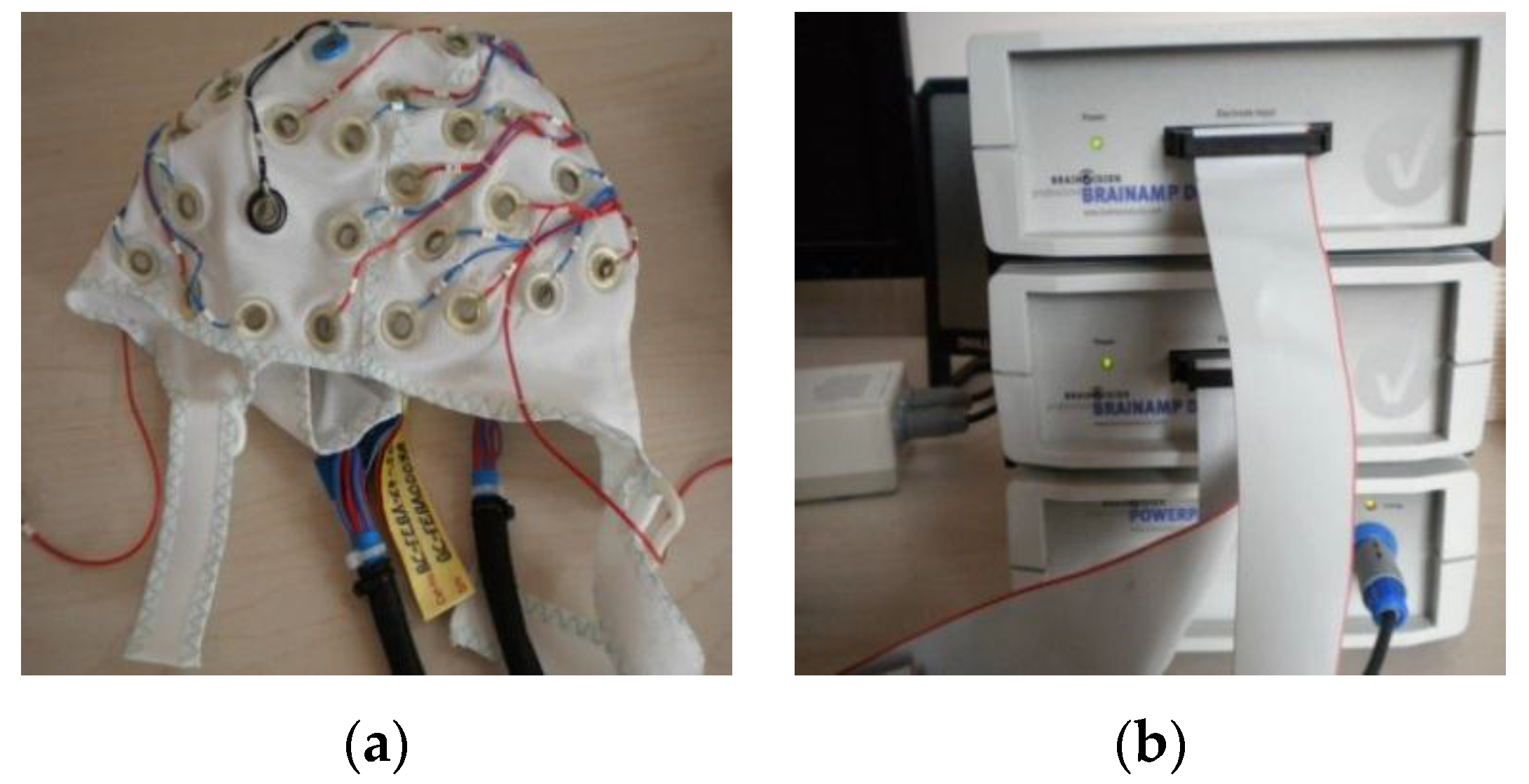
6.1. Experiment of Homemade Wearable BCI Model for EEG Collection
- Condition 1: (1) sleep deprivation; (2) test time is the next day between 4 a.m and 6 a.m;
- Condition 2: (1) having a normal night sleep; (2) test time is the next day between 9 a.m and 11 a.m.
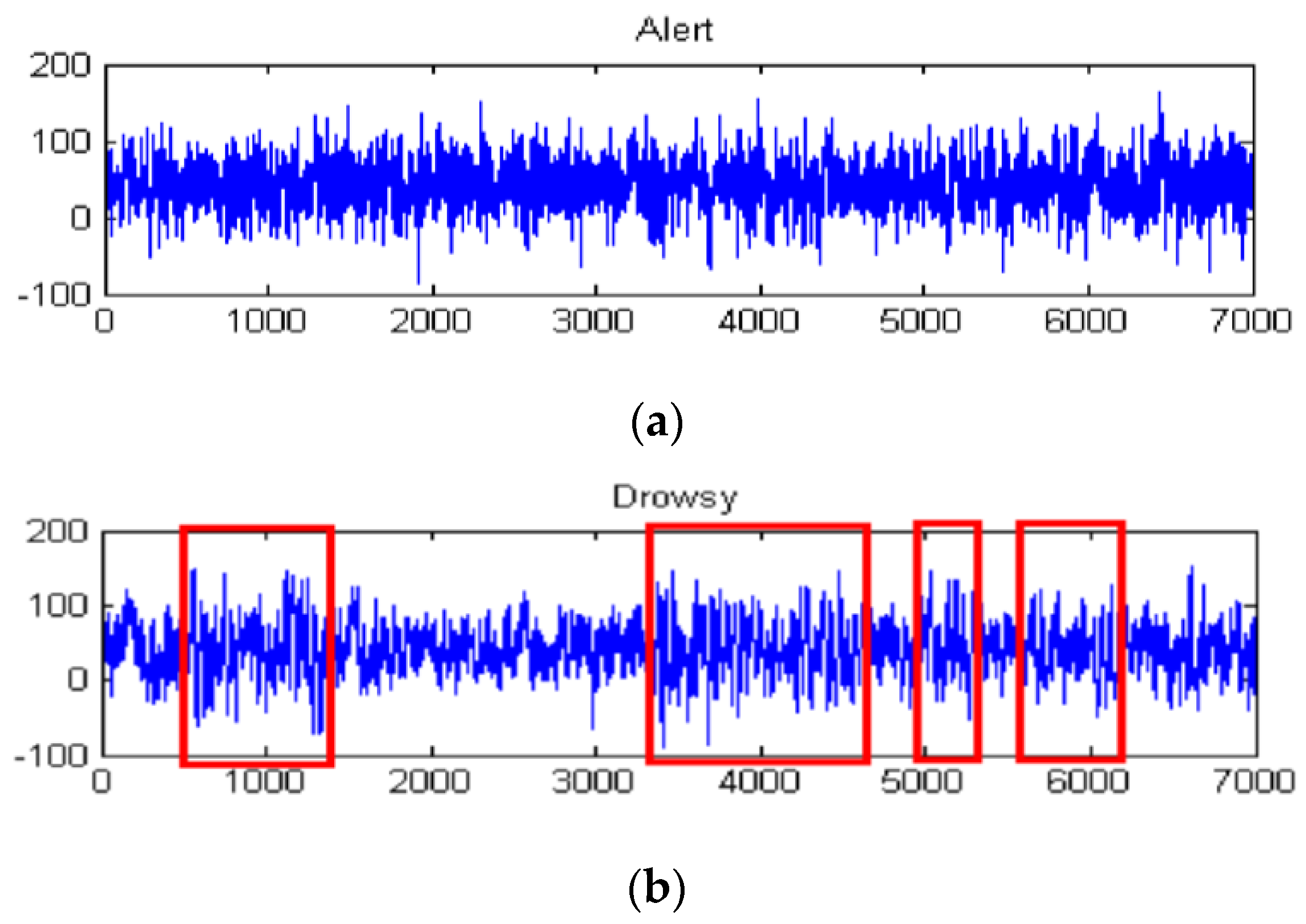
6.2. Experimental Results for EEG Preprocessing and Driver Vigilance Detection Model
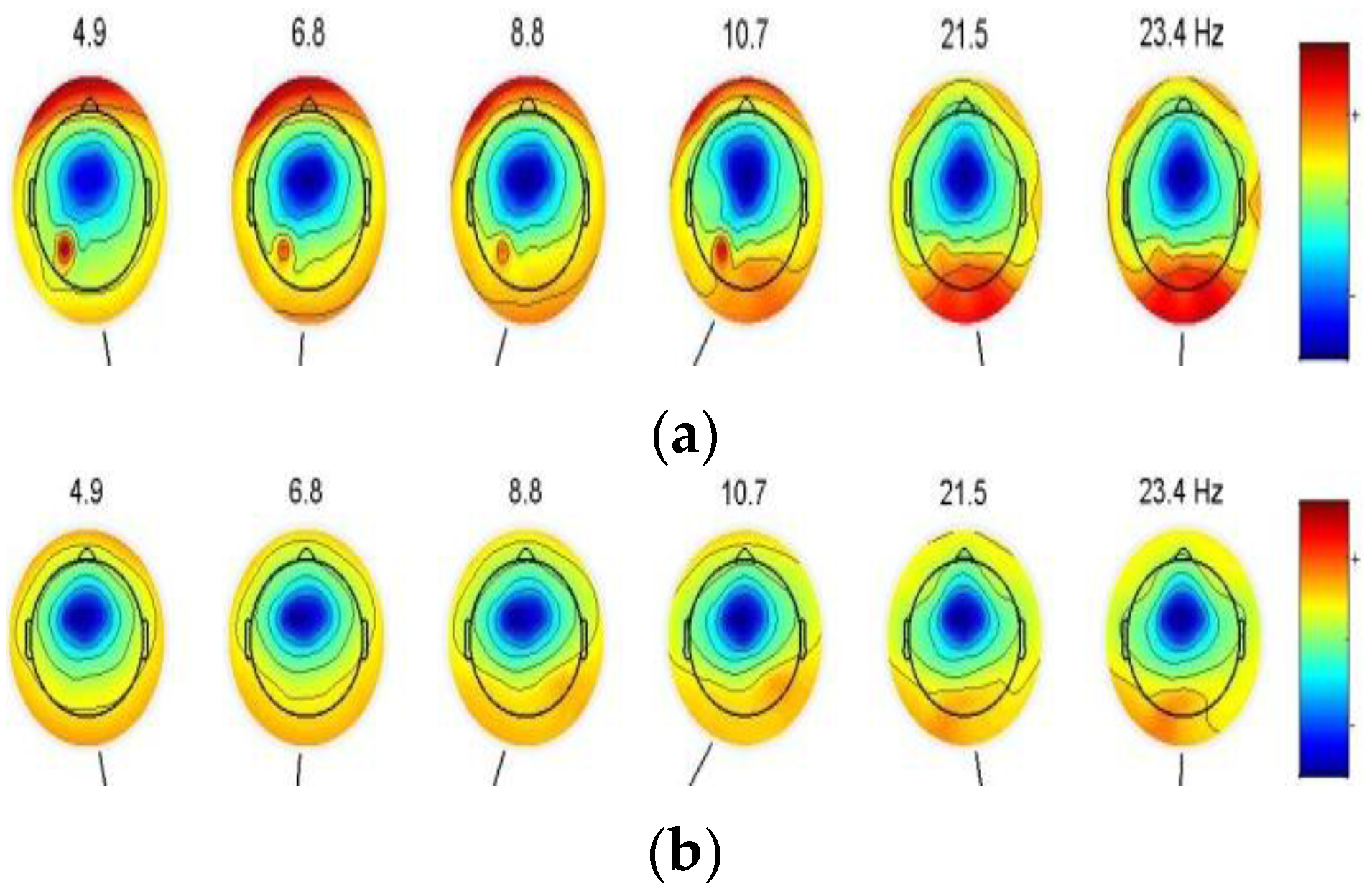
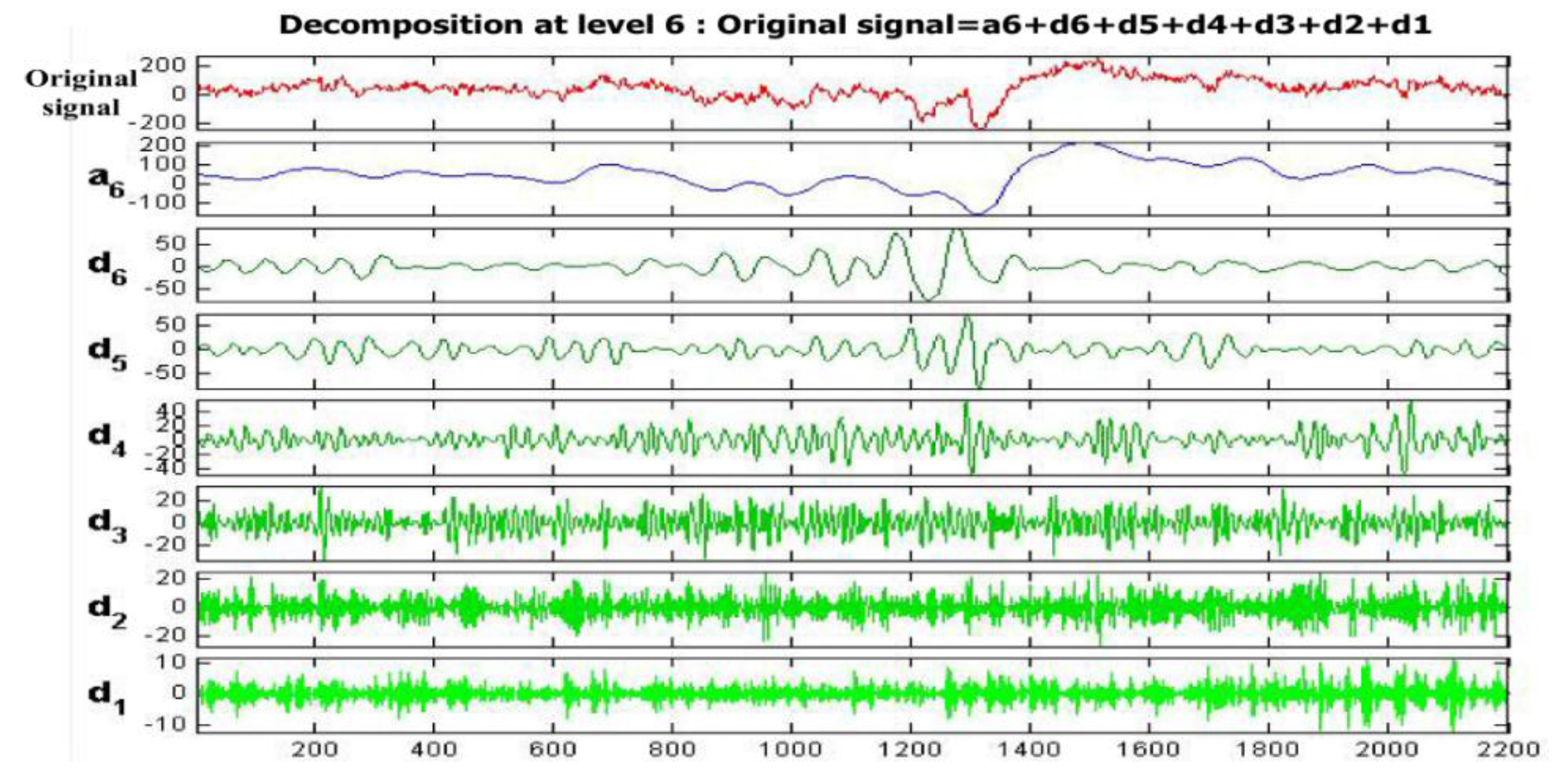
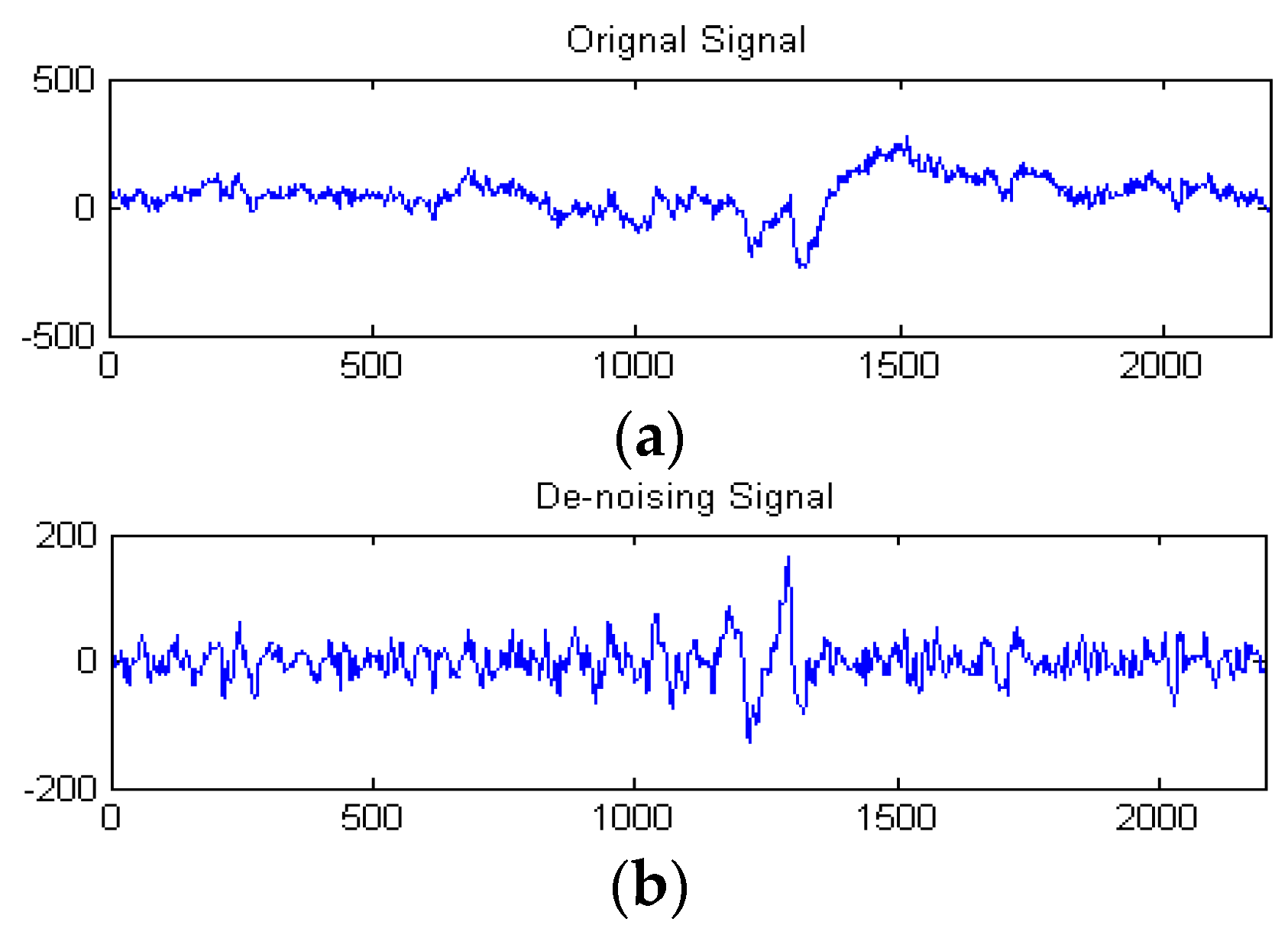
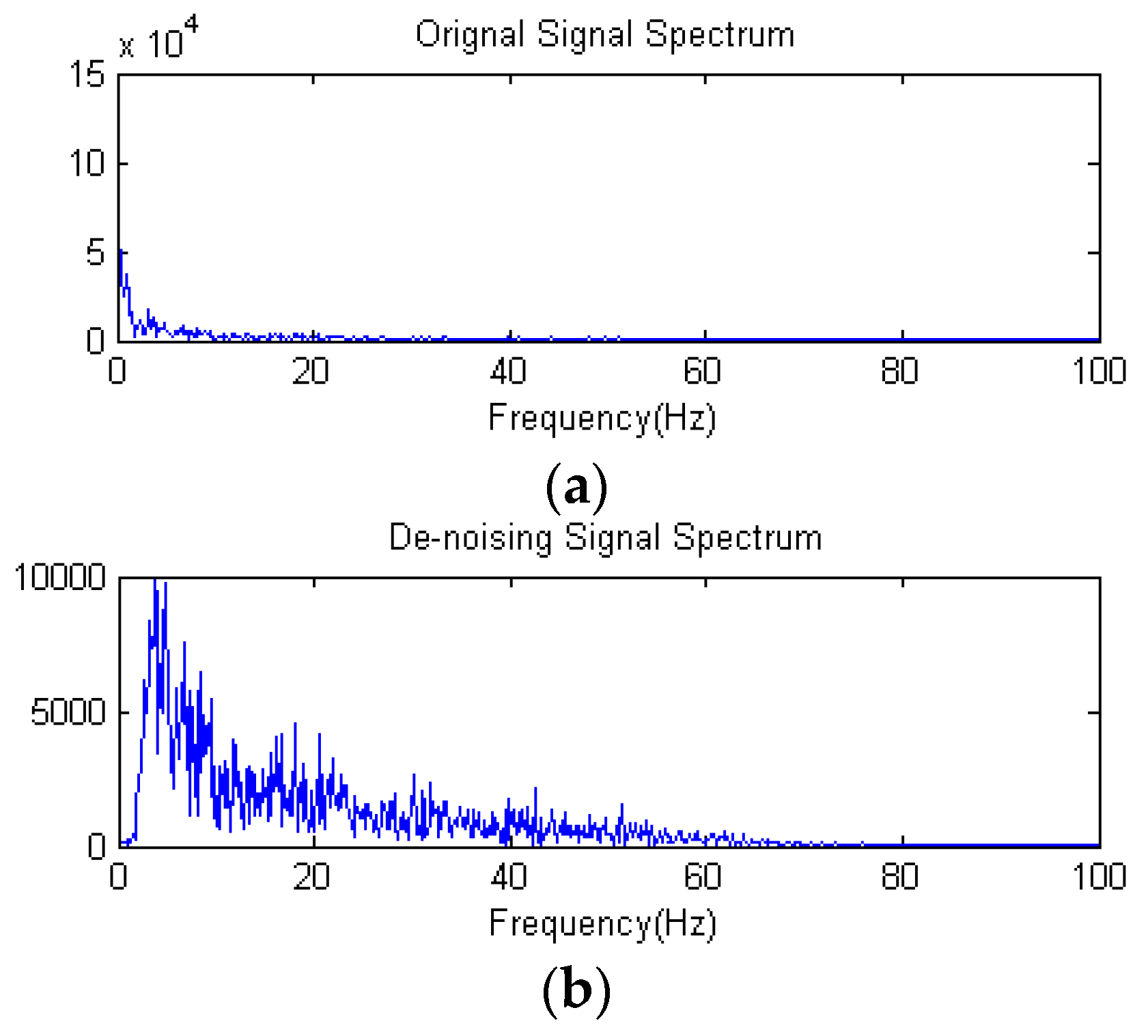
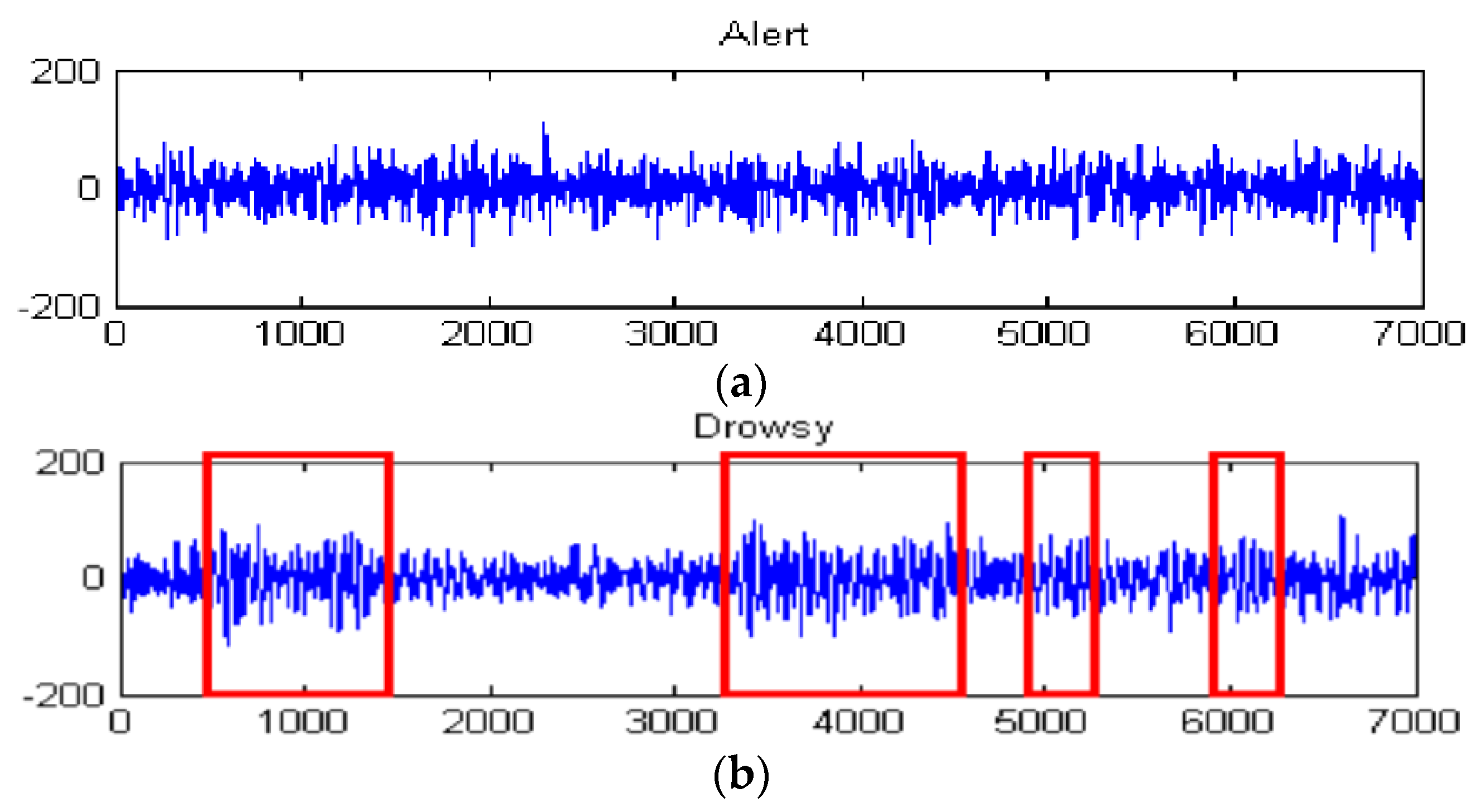
6.2.1. Preprocessing Experiment
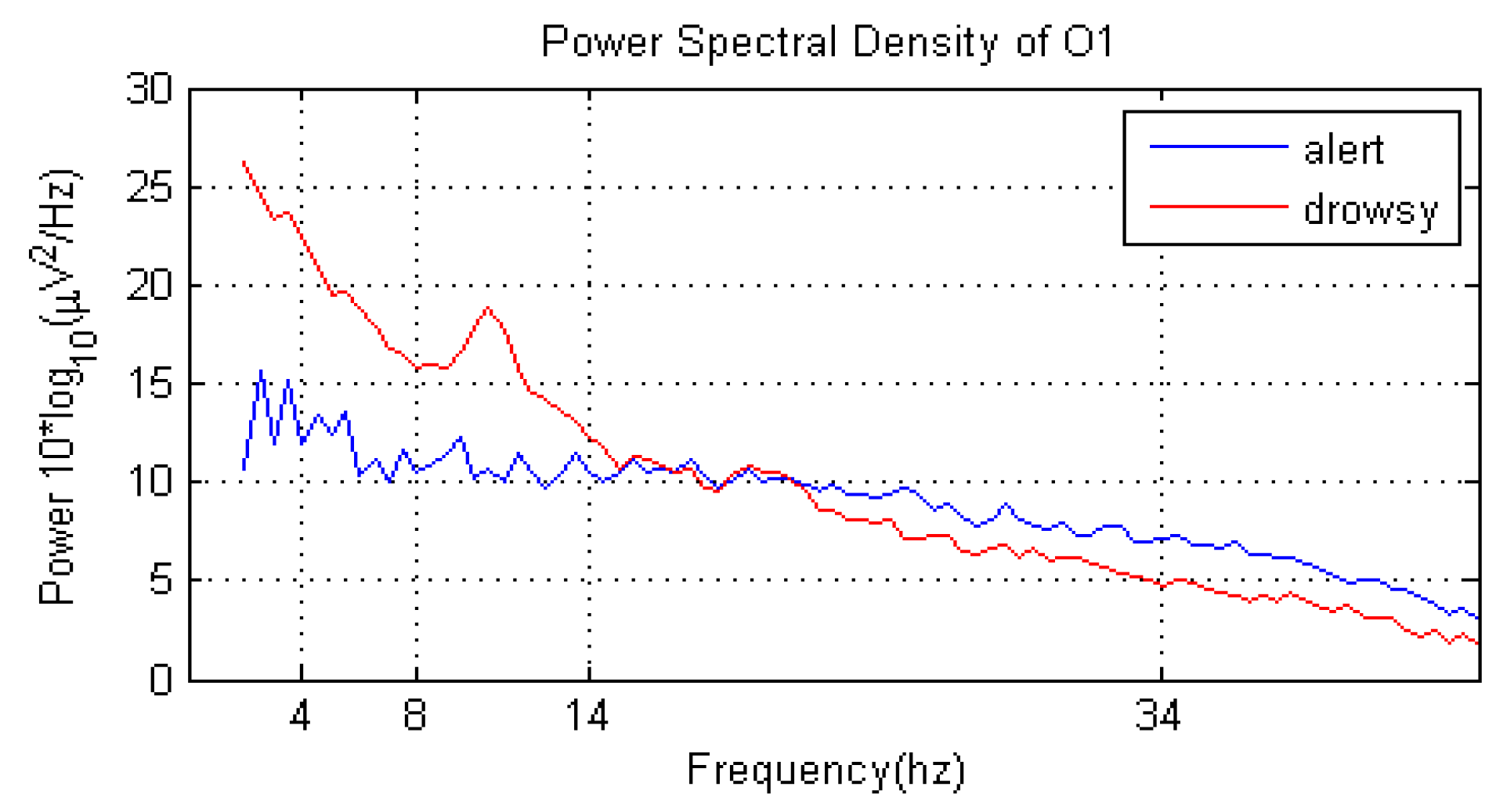
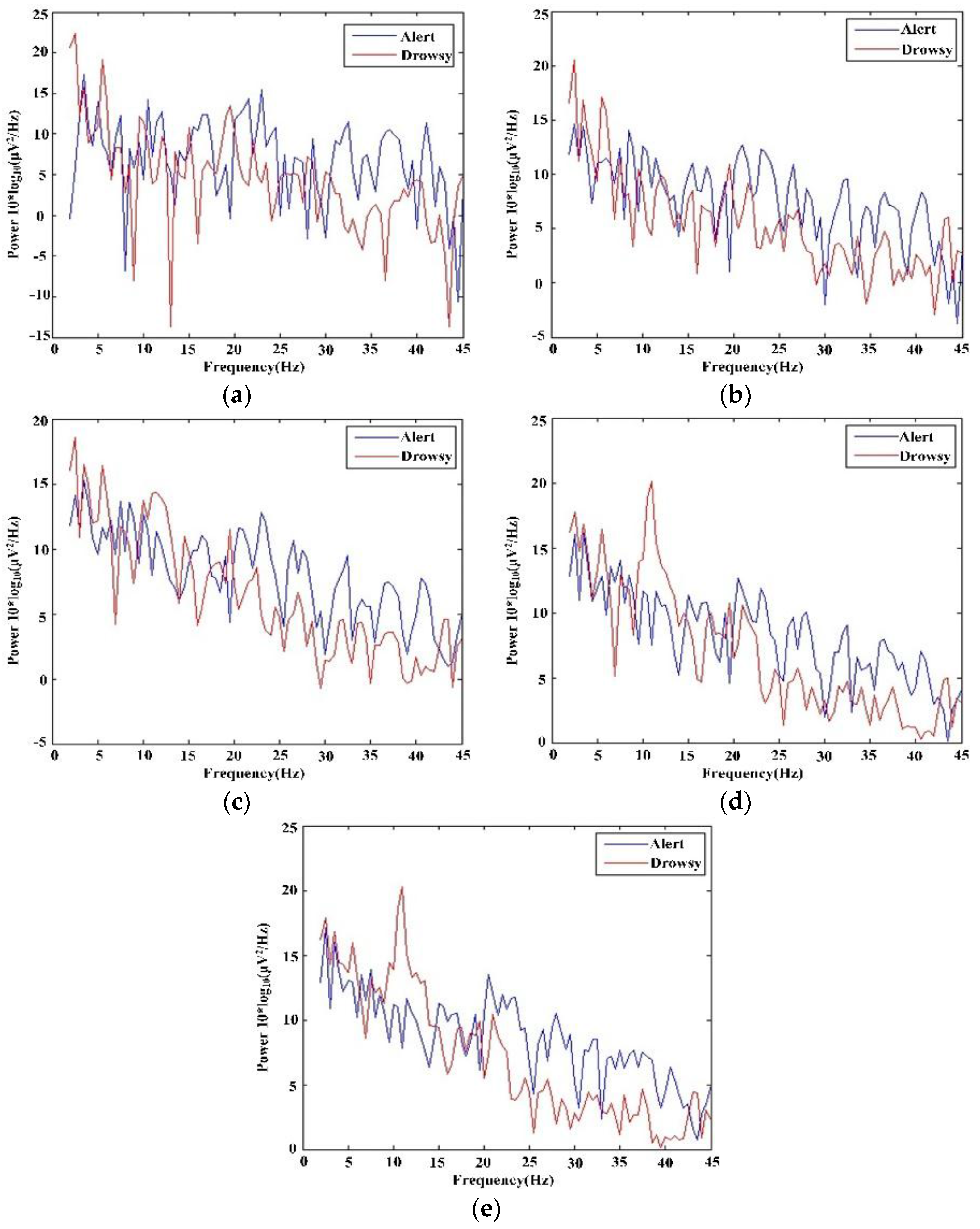
6.2.2. Feature Extraction Experiment
6.3.3. Classification Experiment
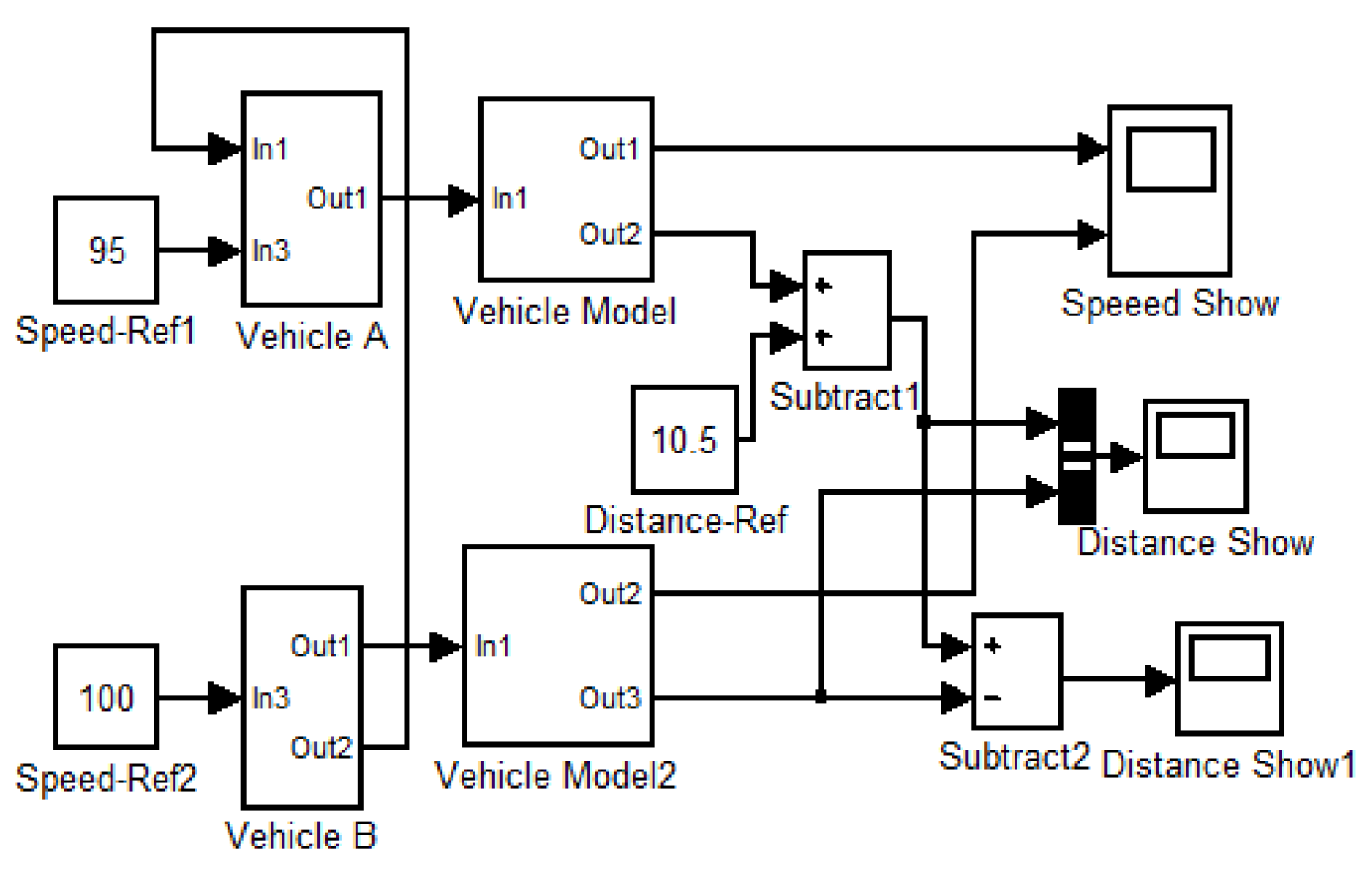
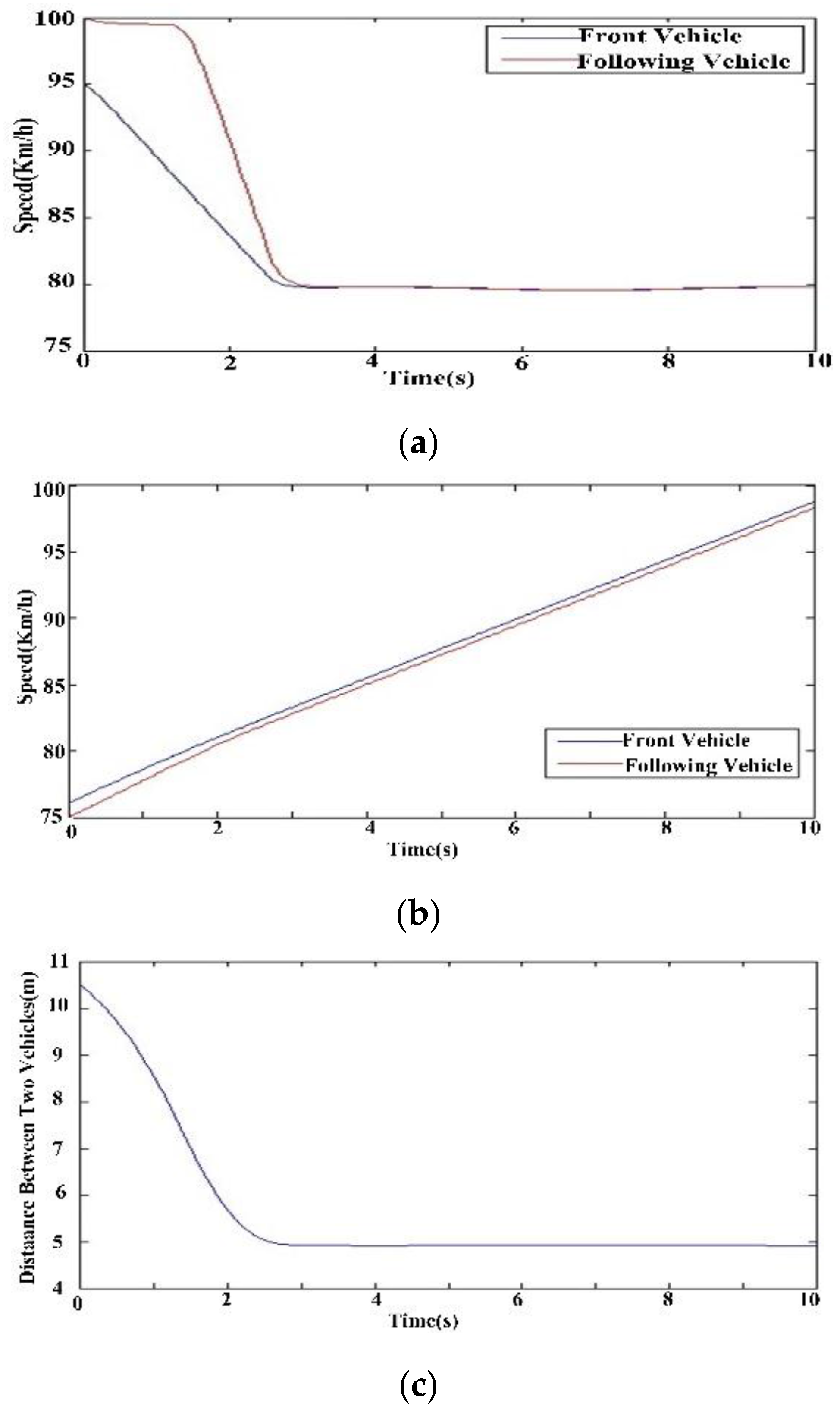
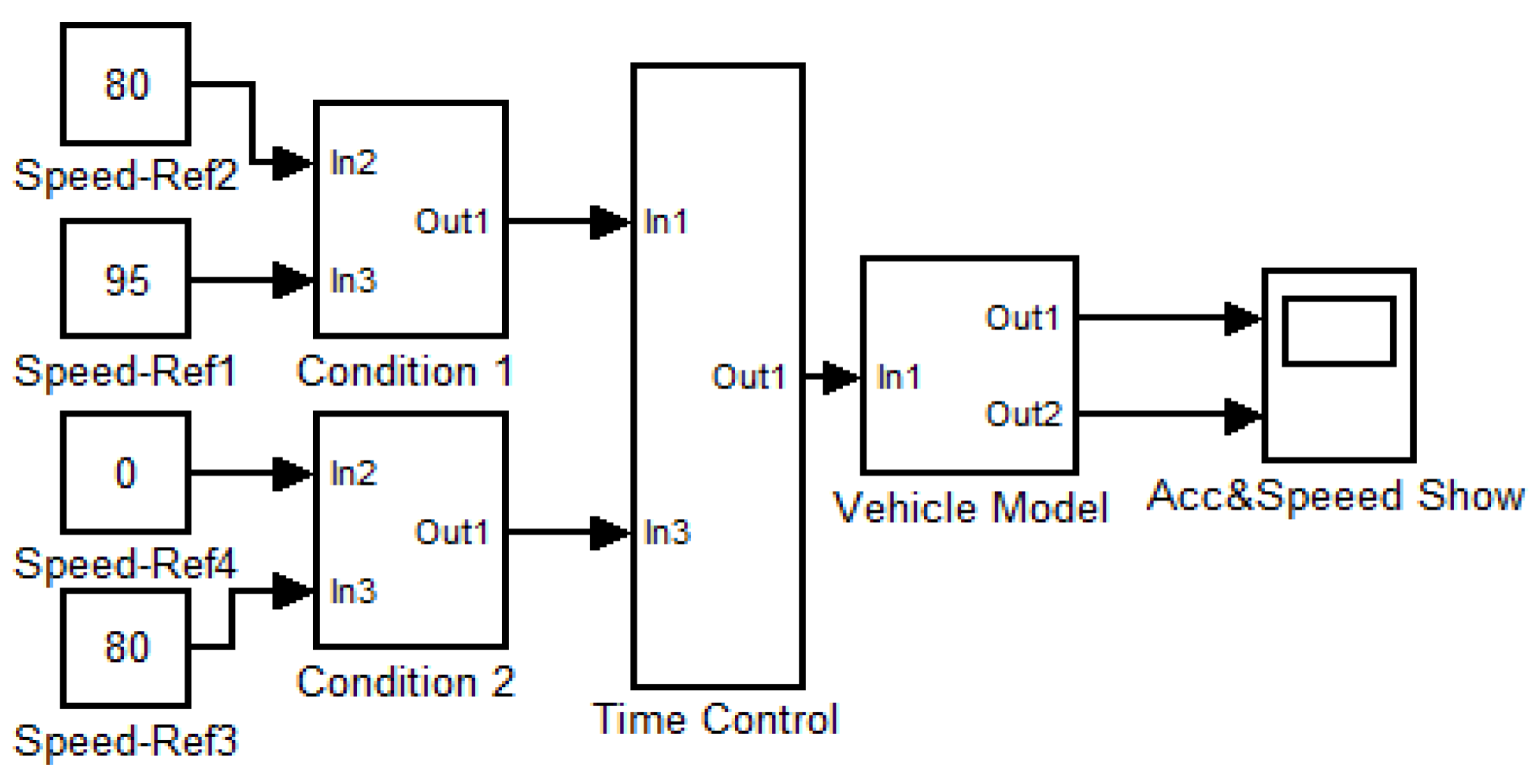
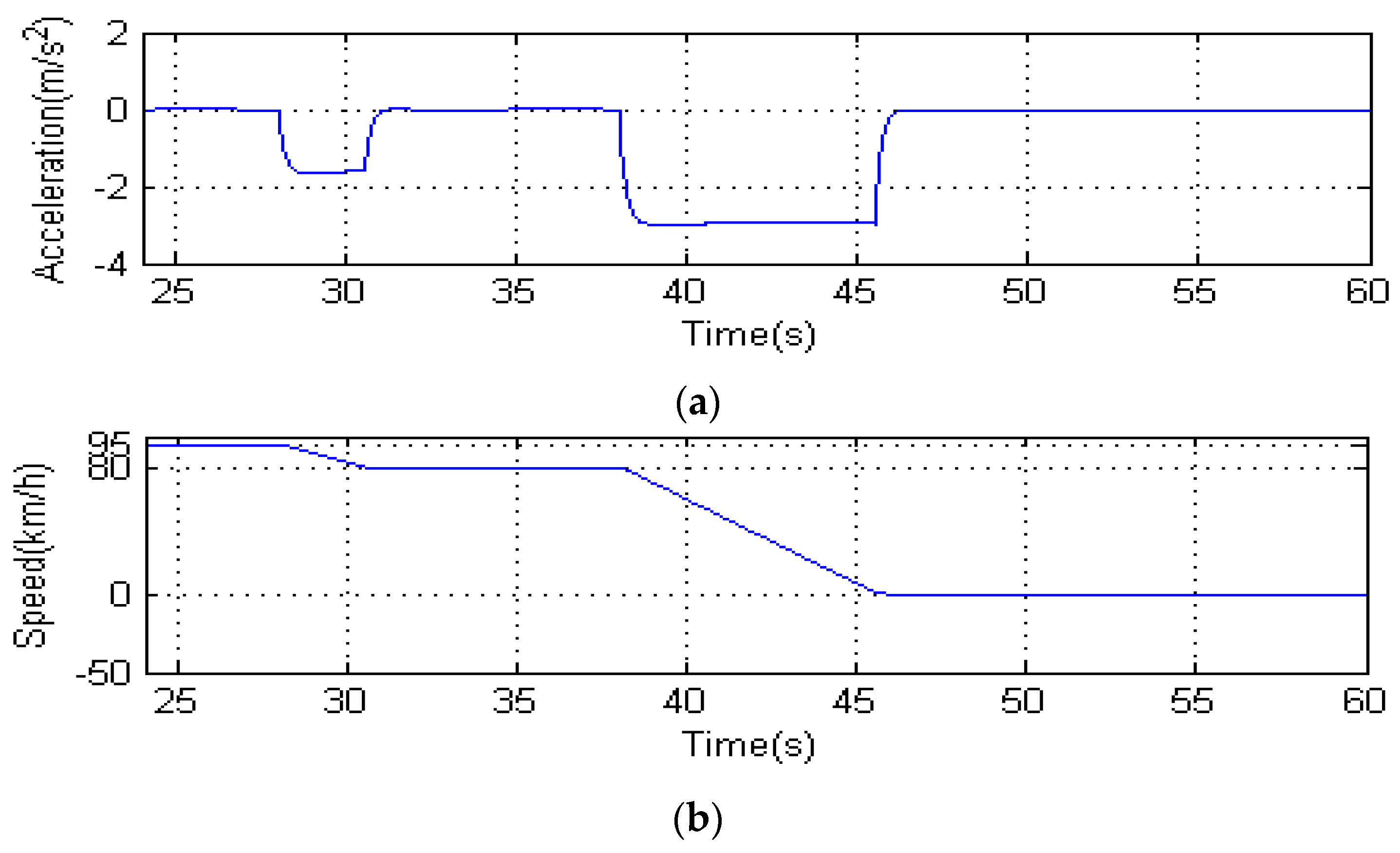
6.3.4. Vehicle Speed Control Experiment
- v11 = 95 km/h, v21 = 100 km/h, La = 10.5 m (The distance of L is calculated through Equation (16) and equal to 10.39 m, so condition of L < La is satisfied);
- When drowsiness is detected, the front car decelerates and an accelerometer of af is calculated by Equation (16);
- The following car catches the information of the front car and immediately decelerates.
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kong, W.; Lin, W.; Babiloni, F.; Hu, S.; Borghini, G. Investigating driver fatigue versus alertness using the granger causality network. Sensors 2015, 15, 19181–19198. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Chung, W.Y. Detection of Driver Drowsiness Using Wavelet Analysis of Heart Rate Variability and a Support Vector Machine Classifier. Sensors 2013, 13, 16494–16511. [Google Scholar] [CrossRef] [PubMed]
- Harrison, M. Distracted Driving 2009; Traffic Safety Facts, Research Note; NHTSA: Washington, WA, USA, 2010. [Google Scholar]
- Lin, C.T.; Wu, R.C.; Liang, S.F.; Chao, W.H.; Chen, Y.J.; Jung, T.P. EEG-based drowsiness estimation for safety driving using independent component analysis. IEEE Trans. Circuits Syst. I Regul Pap. 2005, 52, 2726–2738. [Google Scholar]
- Lin, C.T.; Chang, C.J.; Lin, B.S.; Hung, S.H.; Chao, C.F.; Wang, I.J. A real-time wireless brain-computer interface system for drowsiness detection. IEEE Trans. Biomed. Circuits Syst. 2010, 4, 214–222. [Google Scholar] [CrossRef] [PubMed]
- Picot, A.; Charbonnier, S.; Caplier, A. On-line detection of drowsiness using brain and visual information. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 2012, 42, 764–775. [Google Scholar] [CrossRef]
- Zhang, Z.T.; Zhang, J.S. A new real-time eye tracking based on nonlinear unscented kalman filter for monitoring driver fatigue. J. Control Theory Appl. 2010, 8, 181–188. [Google Scholar] [CrossRef]
- Pilutti, T.; Ulsoy, A.G. Identification of driver state for lane-keeping tasks. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 1999, 29, 486–502. [Google Scholar] [CrossRef]
- Lee, J.W.; Lee, S.K.; Kim, C.H.; Kim, K.H.; Kwon, O.C. Detection of drowsy driving based on driving information. In Proceedings of the 2014 International Conference on Information and Communication Technology Convergence, Busan, Korea, 22–24 October 2014; pp. 607–608.
- Ji, Q.; Lan, P.; Looney, C. A probabilistic framework for modeling and real-time monitoring human fatigue. IEEE Trans. Syst. Man Cybern. A Syst. Hum. 2006, 36, 862–875. [Google Scholar]
- Sigari, M.H.; Fathy, M.; Soryani, M. A driver face monitoring system for fatigue and distraction detection. Int. J. Veh. Technol. 2013, 2013. [Google Scholar] [CrossRef]
- Fu, X.P.; Guan, X.; Peli, E.; Liu, H.B.; Luo, G. Automatic calibration method for driver’s head orientation in natural driving environment. IEEE Trans. Intell. Transp. Syst. 2013, 14, 303–312. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Z.T.; Zhang, J.S. Sampling strong tracking nonlinear unscented kalman filter and its application in eye tracking. Chin. Phys. B 2010, 19, 324–332. [Google Scholar]
- Khushaba, R.N.; Kodagoda, S.; Lal, S.; Dissanayake, G. Driver drowsiness classification using fuzzy wavelet-packet-based feature-extraction algorithm. IEEE Trans. Biomed. Eng. 2011, 58, 121–131. [Google Scholar] [CrossRef] [PubMed]
- Bergasa, L.M.; Nuevo, J.; Sotelo, M.A.; Vazquez, M. Real-time system for monitoring driver vigilance. IEEE Trans. Intell. Transp. Syst. 2006, 7, 63–77. [Google Scholar] [CrossRef]
- Šušmáková, K. Human sleep and sleep EEG. Meas. Sci. Rev. 2004, 4, 59–74. [Google Scholar]
- Lin, C.T.; Chuang, C.H.; Huang, C.S.; Tsai, S.F.; Lu, S.W.; Chen, Y.H.; Ko, L.W. Wireless and wearable EEG system for evaluating driver vigilance. IEEE Trans. Biomed. Circuits Syst. 2014, 8, 165–176. [Google Scholar] [PubMed]
- Lin, C.T.; Ko, L.W.; Chung, I.F.; Huang, T.Y.; Chen, Y.C.; Jung, T.P.; Liang, S.F. Adaptive EEG-based alertness estimation system by using ICA-based fuzzy neural networks. IEEE Trans. Circuits Syst. I Regul. Pap. 2006, 53, 2469–2476. [Google Scholar] [CrossRef]
- Rodger, J.A.; Rodger, J.A. Reinforcing Inspiration for Technology Acceptance: Improving Memory and Software Training Results through Neuro-Physiological Performance. Comput. Hum. Behav. 2014, 38, 174–184. [Google Scholar] [CrossRef]
- Rodger, J.A.; Gonzalez, S.P. A study on Emotion and Memory in Technology Adoption. J. Comput. Inf. Syst. 2014, 54, 31–41. [Google Scholar]
- Rodger, J.A. NeuroIS Knowledge Discovery Approach to Prediction of Traumatic Brain Injury Survival Rates: A Semantic Data Analysis Regression Feasibility Study; Springer International Publishing: Entlebuch, Switzerland, 2015; pp. 1–8. [Google Scholar]
- Jung, T.P.; Makeig, S.; Stensmo, M.; Sejnowski, T.J. Estimating alertness from the EEG power spectrum. IEEE Trans. Biomed. Eng. 1997, 44, 60–69. [Google Scholar] [CrossRef] [PubMed]
- Lin, F.C.; Ko, L.W.; Chuang, C.H.; Su, T.P.; Lin, C.T. Generalized EEG-based drowsiness prediction system by using a self-organizing neural fuzzy system. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 2044–2055. [Google Scholar] [CrossRef]
- Yu, H.; Lu, H.; Ouyang, T.; Liu, H.; Lu, B.L. Vigilance detection based on sparse representation of EEG. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Buenos Aires, Argentina, 31 August–4 September 2010; pp. 2439–2442.
- Aharon, M.; Elad, M.; Bruckstein, A. K-SVD: An algorithm for designing overcomplete dictionaries for sparse representation. IEEE Trans. Signal Process. 2006, 54, 4311–4322. [Google Scholar] [CrossRef]
- Al-Qazzaz, N.K.; Hamid, B.M.A.S.; Ahmad, S.A.; Islam, M.S.; Escudero, J. Selection of mother wavelet functions for multi-channel eeg signal analysis during a working memory task. Sensors 2015, 15, 29015–29035. [Google Scholar] [CrossRef] [PubMed]
- Lee, B.G.; Lee, B.L.; Chung, W.Y. Mobile healthcare for automatic driving sleep-onset detection using wavelet-based eeg and respiration signals. Sensors 2014, 14, 17915–17936. [Google Scholar] [CrossRef] [PubMed]
- He, Q.C.; Li, W.; Fan, X.M.; Fei, Z.M. Driver fatigue evaluation model with integration of multi-indicators based on dynamic Bayesian network. IET Intell. Trans. Syst. 2015, 9, 547–554. [Google Scholar] [CrossRef]
- Martinez, J.J.; Canudas-de-Wit, C. A safe longitudinal control for adaptive cruise control and stop-and-go scenarios. IEEE Trans. Control Syst. Technol. 2007, 15246–15258. [Google Scholar] [CrossRef]
- Li, X.; Wu, S.; Li, F. Fuzzy based collision avoidance control strategy considering crisis index in low speed urban area. In Proceedings of the IEEE Conference and Expo on Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6.
- Xiong, H.; Boyle, L.N. Drivers’ adaptation to adaptive cruise control: Examination of automatic and manual braking. IEEE Trans. Intell. Trans. Syst. 2012, 13, 1468–1473. [Google Scholar] [CrossRef]
- Zhang, Z.T.; Xu, H.; Chao, Z.F.; Li, X.P.; Wang, C.B. A novel vehicle reversing speed control based on obstacle detection and sparse representation. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1321–1334. [Google Scholar] [CrossRef]
- Mccall, J.C.; Trivedi, M.M. Human behavior based predictive brake assistance. In Proceedings of the IEEE Intelligent Vehicles Symposium, Tokyo, Japan, 13–15 June 2006; pp. 8–12.
- Keller, C.G.; Dang, T.; Fritz, H.; Joos, A.; Rabe, C.; Gavrila, D.M. Active pedestrian safety by automatic braking and evasive steering. IEEE Trans. Intell. Trans. Syst. 2011, 12, 1292–1304. [Google Scholar] [CrossRef]
- Naranjo, J.E.; González, C.; García, R.; Pedro, T.D. ACC+stop&go maneuvers with throttle and brake fuzzy control. IEEE Trans. Intell. Trans. Syst. 2006, 7, 213–225. [Google Scholar]
- Naranjo, J.E.; Gonzalez, C.; Garcia, R.; Pedro, T.D. Cooperative throttle and brake fuzzy control for ACC+stop&go maneuvers. IEEE Trans. Veh. Technol. 2007, 56, 1623–1630. [Google Scholar]
- Tang, X.F.; Gao, F.; Xu, G.Y.; Ding, N.G.; Cai, Y.; Ma, M.M.; Liu, J.X. Sensor systems for vehicle environment perception in a highway intelligent space system. Sensors 2014, 14, 8513–8527. [Google Scholar] [CrossRef] [PubMed]
- Castillo Aguilar, J.J.; Cabrera Carrillo, J.A.; Guerra Fernández, A.J.; Carabias-Acosta, E. Robust road condition detection system using in-vehicle standard sensors. Sensors 2015, 15, 32056–32078. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Wang, J.M. Adaptive vehicle speed control with input injections for longitudinal motion independent road frictional condition estimation. IEEE Trans. Veh. Technol. 2011, 60, 839–848. [Google Scholar] [CrossRef]
- Zhang, Z.T.; Zhang, J.S. Driver fatigue detection based intelligent vehicle control. In Proceedings of the 18th International Conference on Pattern Recognition, Hong Kong, China, 20–24 August 2006; pp. 1262–1265.
- Wrigth, J.; Yang, A.Y.; Ganesh, A.; Sastry, S.S.; Ma, Y. Robust face recognition via sparse representation. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 201–226. [Google Scholar]
- Solomon, D. Accidents on Main Rural Highways Related to Speed, Drivers, and Vehicle; Washington Bureau of Public Roads: Washington, DC, USA, 1964. [Google Scholar]
- Joksch, H.C. Velocity change and fatality risk in a crash—A rule of thumb. Accid. Anal. Prev. 1993, 25, 103–104. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t1 | t2 | am | Dmin | |
|---|---|---|---|---|
| Range | 0.5~1.5 | 0.2/0.7 | 0~6.0 | 2~5 |
| Value | 1.2 | 0.2 | 4.5 | 5 |
| Driver Sum | Subject | Number | Age |
|---|---|---|---|
| 10 | Male | 7 | 26 |
| 26 | |||
| 38 | |||
| 42 | |||
| 23 | |||
| 23 | |||
| 24 | |||
| Female | 3 | 24 | |
| 24 | |||
| 25 |
| b(s) | 0 | 2 | 4 | 6 | 8 |
|---|---|---|---|---|---|
| Time(s) | 0.0006 | 0.0015 | 0.0020 | 0.0022 | 0.0025 |
| b(s) | Driver1 | Driver2 | Driver3 | Driver4 |
|---|---|---|---|---|
| 0 | 74.72 | 56.85 | 72.72 | 46.42 |
| 1 | 74.64 | 77.24 | 73.14 | 62.58 |
| 2 | 78.57 | 61.11 | 76.43 | 73.18 |
| 3 | 81.38 | 61.54 | 75.14 | 67.15 |
| 4 | 85.63 | 78.87 | 84.30 | 72.79 |
| 5 | 85.59 | 52.48 | 88.30 | 71.11 |
| 6 | 90.75 | 72.85 | 88.23 | 82.83 |
| 7 | 91.59 | 87.05 | 97.04 | 78.94 |
| 8 | 93.02 | 83.33 | 82.73 | 84.84 |
| b(s) | Driver1 | Driver2 | Driver3 | Driver4 |
|---|---|---|---|---|
| 0 | 74.42 | 47.65 | 59.88 | 72.72 |
| 1 | 78.92 | 66.14 | 76.13 | 77.77 |
| 2 | 81.43 | 69.04 | 78.85 | 79.60 |
| 3 | 87.97 | 92.80 | 79.31 | 85.43 |
| 4 | 91.38 | 62.90 | 76.30 | 85.33 |
| 5 | 92.22 | 71.54 | 89.53 | 82.55 |
| 6 | 94.80 | 97.54 | 87.71 | 82.43 |
| 7 | 95.65 | 95.04 | 96.47 | 93.87 |
| 8 | 95.35 | 96.66 | 98.22 | 94.55 |
| b(s) | Driver5 | Driver6 | Driver7 | Driver8 |
|---|---|---|---|---|
| 0 | 66.82 | 64.02 | 67.76 | 56.54 |
| 1 | 70.09 | 69.16 | 69.16 | 73.83 |
| 2 | 75.70 | 74.77 | 73.83 | 73.83 |
| 3 | 75.59 | 79.81 | 73.24 | 79.34 |
| 4 | 73.71 | 80.28 | 77.93 | 62.91 |
| 5 | 69.48 | 67.14 | 82.63 | 69.95 |
| 6 | 69.34 | 90.09 | 85.38 | 83.96 |
| 7 | 92.45 | 91.04 | 94.34 | 85.38 |
| 8 | 95.75 | 99.06 | 94.34 | 85.38 |
| b(s) | Driver5 | Driver6 | Driver7 | Driver8 |
|---|---|---|---|---|
| 0 | 62.15 | 59.81 | 64.95 | 71.03 |
| 1 | 66.36 | 65.42 | 69.16 | 68.69 |
| 2 | 73.36 | 74.77 | 76.17 | 78.50 |
| 3 | 75.59 | 76.53 | 80.75 | 80.28 |
| 4 | 77.46 | 81.22 | 77.93 | 79.81 |
| 5 | 69.95 | 82.63 | 80.75 | 82.63 |
| 6 | 75.00 | 78.77 | 82.08 | 89.15 |
| 7 | 82.55 | 88.21 | 91.51 | 90.09 |
| 8 | 95.28 | 93.87 | 97.17 | 81.13 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Luo, D.; Rasim, Y.; Li, Y.; Meng, G.; Xu, J.; Wang, C. A Vehicle Active Safety Model: Vehicle Speed Control Based on Driver Vigilance Detection Using Wearable EEG and Sparse Representation. Sensors 2016, 16, 242. https://0-doi-org.brum.beds.ac.uk/10.3390/s16020242
Zhang Z, Luo D, Rasim Y, Li Y, Meng G, Xu J, Wang C. A Vehicle Active Safety Model: Vehicle Speed Control Based on Driver Vigilance Detection Using Wearable EEG and Sparse Representation. Sensors. 2016; 16(2):242. https://0-doi-org.brum.beds.ac.uk/10.3390/s16020242
Chicago/Turabian StyleZhang, Zutao, Dianyuan Luo, Yagubov Rasim, Yanjun Li, Guanjun Meng, Jian Xu, and Chunbai Wang. 2016. "A Vehicle Active Safety Model: Vehicle Speed Control Based on Driver Vigilance Detection Using Wearable EEG and Sparse Representation" Sensors 16, no. 2: 242. https://0-doi-org.brum.beds.ac.uk/10.3390/s16020242