1. Introduction
Location Based Service (LBS), also known as mobile location information service, is a widely used service which can determine the actual geographical location of users and provide users with the location-related information at any time in order to meet the requirements of different users [
1,
2]. With the continuous development of smartphone technology, smartphone-based pedestrian navigation has become an important emerging branch in the field of pedestrian navigation, and it has broad prospects for kinds of applications [
3]. For instance, smartphone can be utilized to determine and monitor the location and movement of pedestrian. In the event of an unexpected disaster, the positioning information provided by the smartphone can greatly improve the rescue efficiency of government. Smartphone navigation can also be applied to ensure the safety of pedestrian activities. Aim at this research trend in the field of navigation, universities and research institutes around the world have conducted multitudinous researches in LBS. In 2017, the National Institute of Standards and Technology (NIST) of the U.S. Department of Commerce, held a Grand Prix called “PerfLoc”, to encourage participants to develop better algorithms for indoor location and tracking.
At present, the pedestrian positioning and navigation methods in urban environment mainly focus on satellite navigation and its integrated navigations, such as GNSS (Global Navigation Satellite System) and INS (Inertial Navigation System) integrated system. When pedestrian is in an outdoor environment, satellite navigation is the most important tool, and the research on satellite navigation in recent years has also achieved an appreciable performance [
4]. However, modern lifestyle makes it possible for pedestrians to study, work, play in an indoor environment for almost the entire day. As for indoor environments, navigation research mainly focuses on two kinds of methods. The first one is the radio frequency devices, such as UWB (Ultra-Wideband), ZigBee, wireless networks, Wi-Fi, Bluetooth. Another one is the inertial sensors or IMU, which are mounted on human leg, waist, shoulder or other parts [
5]. Inertial navigation results can be achieved with the help of ZUPT and Pedestrian Dead Reckoning (PDR) algorithms [
6]. The two kinds of navigation methods mentioned above have both merits and demerits. The first navigation method needs to deploy radio frequency devices as beacons before commencing navigation, which increases the costs of the system. While inertial navigation algorithm, such as PDR algorithm, is an autonomous navigation without contacting the external environment, has become the primary part of pedestrian navigation system. However, inertial navigation algorithm still has some disadvantages, the most important research content for INS is to slow down its divergence speed. If we use the PDR algorithm only, it is very difficult to obtain the absolute position, due to the limitations of the PDR algorithm. Additional navigation equipment or information are needed to amend INS results. And recently, the integrated navigation methods, such as INS/UWB, INS/WIFI and INS/Bluetooth [
7,
8,
9], have been widely used. For instance, Diaz proposed a method based on the angle measurement to discriminate the step, attitude, and step-length to optimize pedestrian inertial navigation results [
10]. Zam used magnetometers, gyroscopes and accelerometers in conjunction with Extended Kalman Filtering (EKF) to obtain more accurate heading information for the PDR algorithm [
11]. These integrated navigation algorithms show good navigation results, but still require extra navigation information. Once users are in an unfamiliar building without any radio frequency equipment installed, the effect of these integrated algorithms will be greatly reduced.
As a portable communication device, smartphone has been studied and improved in recent years. Lots of sensors have been integrated inside the smartphone, including accelerometer, gravimeter, gyroscope, magnetometer, and so on. The smartphone has become a great platform to study pedestrian navigation. Zeng and his team designed and implemented a seamless indoor and outdoor navigation system based on a smartphone [
12]. Broyles presented a real-time, self-contained outdoor navigation application, only used the existing sensors on a smartphone in conjunction with a preloaded digital elevation map [
13]. Li proposed an algorithm for navigation with smartphone sensors and magnetic matching in Non-WiFi indoor environment [
14]. In the inertial navigation research based on the smartphone, Valerie designed a hybridization filter to calibrate the PDR step-length [
15]. Kang put forward and realized a smartphone-based algorithm SmartPDR navigation system, which can be used in the smartphone with its PDR navigation solution [
16].
When the PDR algorithm is used for smartphone navigation by a pedestrian indoors, it is very hard to keep smartphone stable. At this time, the using-mode of smartphone, or the smartphone’s handheld posture must be paid a particular attention. Generally, pedestrian has to keep the smartphone fixed relative to his body in order to reduce different using-mode errors on pedestrian navigation while walking indoors. But in the daily life, it is hard for user to hold the smartphone with one fixed posture, and the indoor complex magnetic environment makes it impossible to correct the heading angle directly with magnetic field. Therefore, in this paper, an algorithm which does not depend on the environment of a magnetic field has been proposed. This algorithm based on the smartphone’s self-contained MEMS inertial sensors, can discriminate the smartphone’s using-mode and handheld posture by analyzing the output of MEMS sensors, and it can compensate the heading error caused by three different using-modes.
3. Heading Correction Algorithm Based on Middle Time Simulated-Zero Velocity Update
The accuracy of the PDR algorithm is greatly influenced by the sensor. The low-cost gyroscope and accelerometer make it impossible to get high precision positioning results. ZUPT, a simple but reliable method of inertial navigation error compensation, can purposefully reduce the error accumulation in inertial navigation system and significantly boost the positioning accuracy of inertial navigation [
19], so it has been widely used in pedestrian navigation to lessen the heading divergence caused by low-precision sensor’s drift. The most important part of the ZUPT algorithm is the detection of stationary state, then the outputs of the sensors at this stationary state are put into Kalman Filter (KF) as the system errors. After the filtering process, the optimal estimation result is used to correct the system errors [
20].
Because the zero-velocity status can be distinguished by the output of accelerometer and gyroscope when foot is touching ground, the inertial sensors are normally fixed to the foot of the experimenter while using ZUPT as heading compensation in an integrated navigation algorithm. However, in this paper, we use the smartphone to collect the experiment data. Considering the shape, size as well as the using methods of smartphone, the smartphone is held in hands during the experiments, instead of foot mounted. At this time, the smartphone cannot detect the real zero-velocity status, which makes it impossible to use the traditional ZUPT algorithm. In this paper, we propose a Simulated-Zero Velocity Update(S-ZUPT) algorithm to improve the navigation process.
First, a step-detecting algorithm is designed. The signal output from the three-axis accelerometer is pre-processed as follows:
where
,
and
are the 3D acceleration information of the smartphone,
represents the sum of the three-axis acceleration information. Commonly, there are three methods to detect steps, Peak Detection, Average Interval Detection and Zero-Crossing Detection [
21]. In order to reduce the computational complexity, we choose Peak Detection as step-detecting method.
Due to the low-cost sensor and walking swing, the peak points of the true pace are affected by noise. To detect the real steps, two constraints are added to develop the accuracy of step detection:
(1) The acceleration peak must be greater than a certain threshold to avoid false peak caused by other vibrations;
(2) The time interval between two consecutive peaks must be limited in the thresholds, which is helpful to remove the multi-peak effect.
Considering the above two constraints in mathematical form, we have
where
is the acceleration peak threshold,
and
represent the minimum and maximum value of the time intervals. Considering the walking frequency of pedestrians is generally between 2 Hz and 4 Hz, we set
and
.
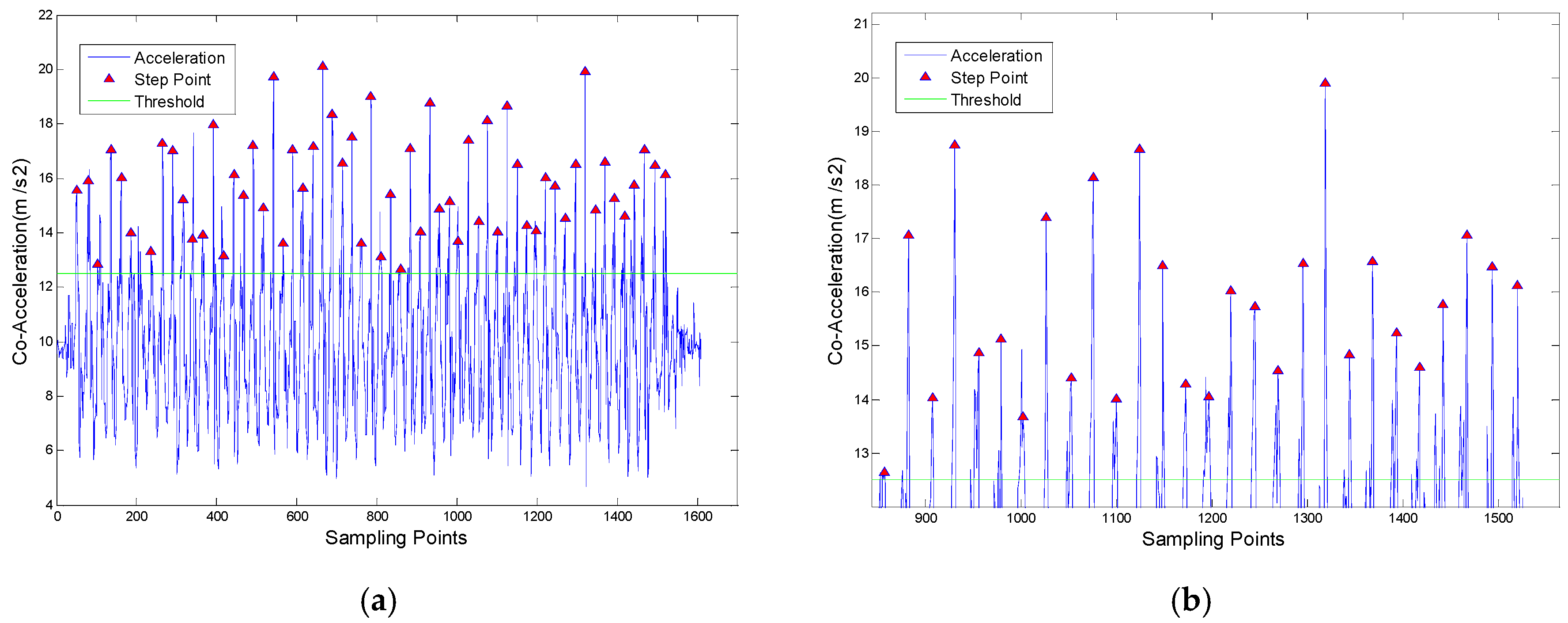
Several experiments have been conducted to validate the algorithm, and the results are shown in
Table 1. From the
Table 1, we can see that in all of the four experimental results, the step number is only one or two steps less than the actual number. The accuracy of single experiment can reach more than 98.3% and the average accuracy is 99.2%.
In the
Figure 2, the red triangle shows the detected peak point. From it we can judge that the value of each step peak point is different, but the sampling interval between steps is similar. The low accuracy of the smartphone sensor makes the different peak values, while the stable pedestrian walking law makes the sampling interval of steps to remain consistent.
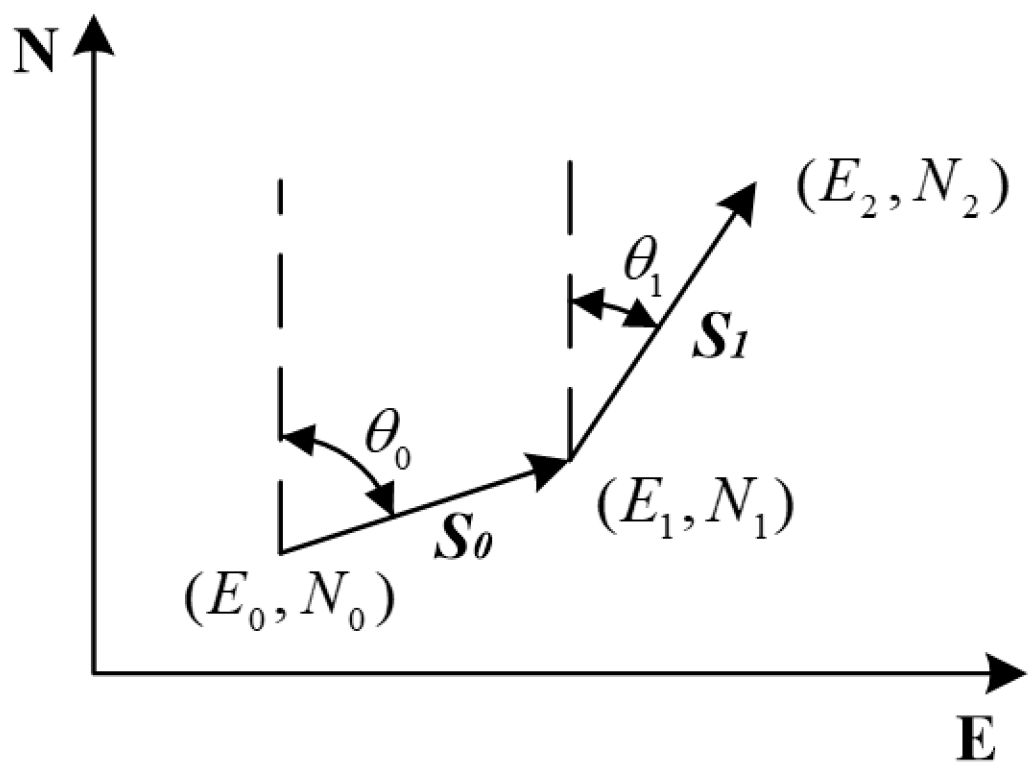
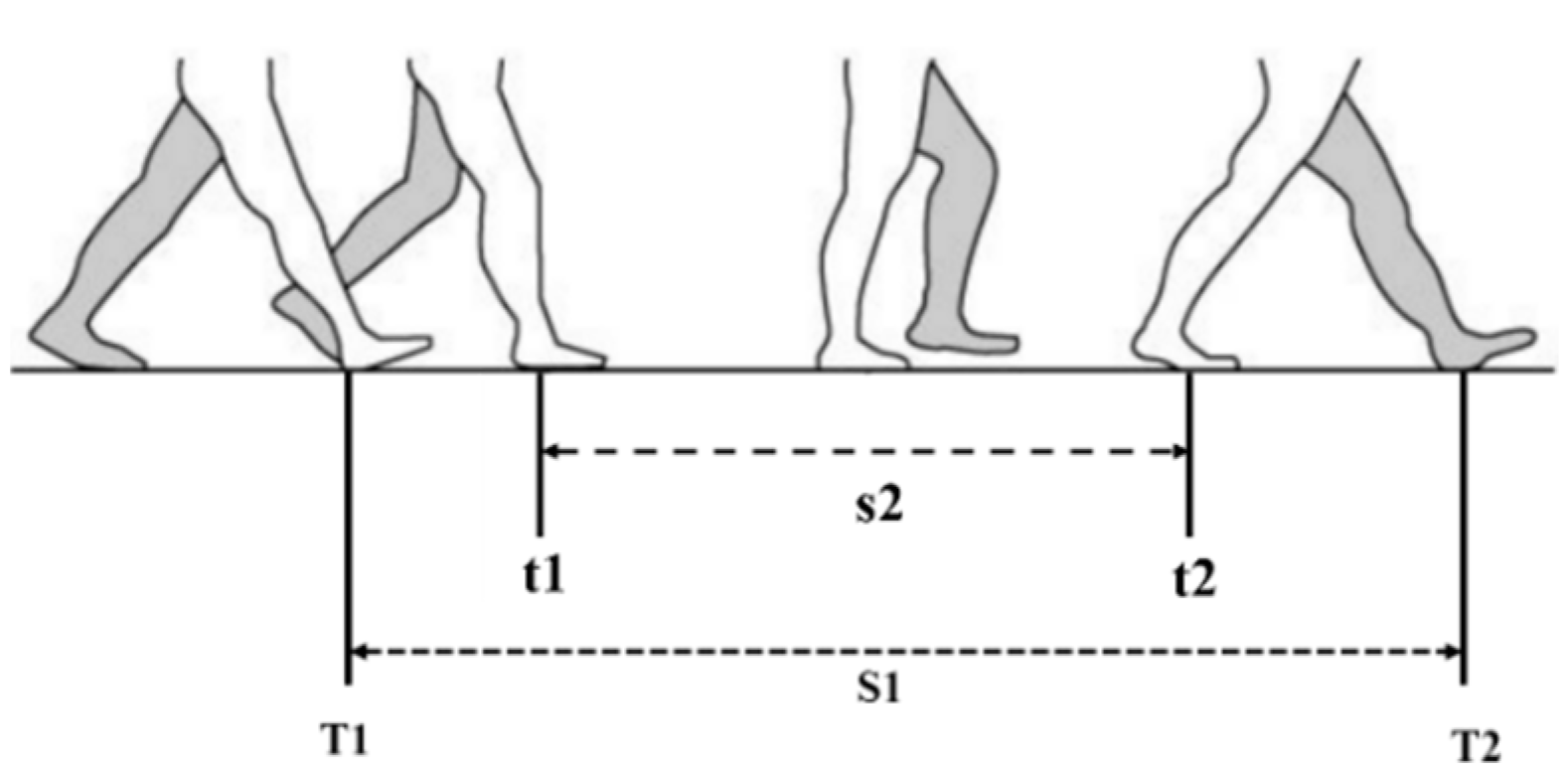
Since there is no traditional zero-velocity status for handheld smartphone navigation, choosing a right method for KF is very important. A typical step cycle is shown in
Figure 3. S1 between the right foot heel landing at T1 and the left foot heel landing at T2 is a complete step cycle. T1 and T2 are defined as step time. The process s2 between t1 and t2 represents the period when pedestrian lifts one foot in the air. In the study of pedestrian’s walking status, we found that the turning and heading changes of the pedestrian happen in s2 part. According to Newtonian Mechanics, another force is required to change the motion of an object while moving. In s2 process, the right foot supports the human body to change his heading. During this time, the heading change of smartphone is consistent with that of the human body. At same time, a Simulated-Zero Velocity Update (S-ZUPT) status, similar as the traditional ZUPT status, was found within s2.
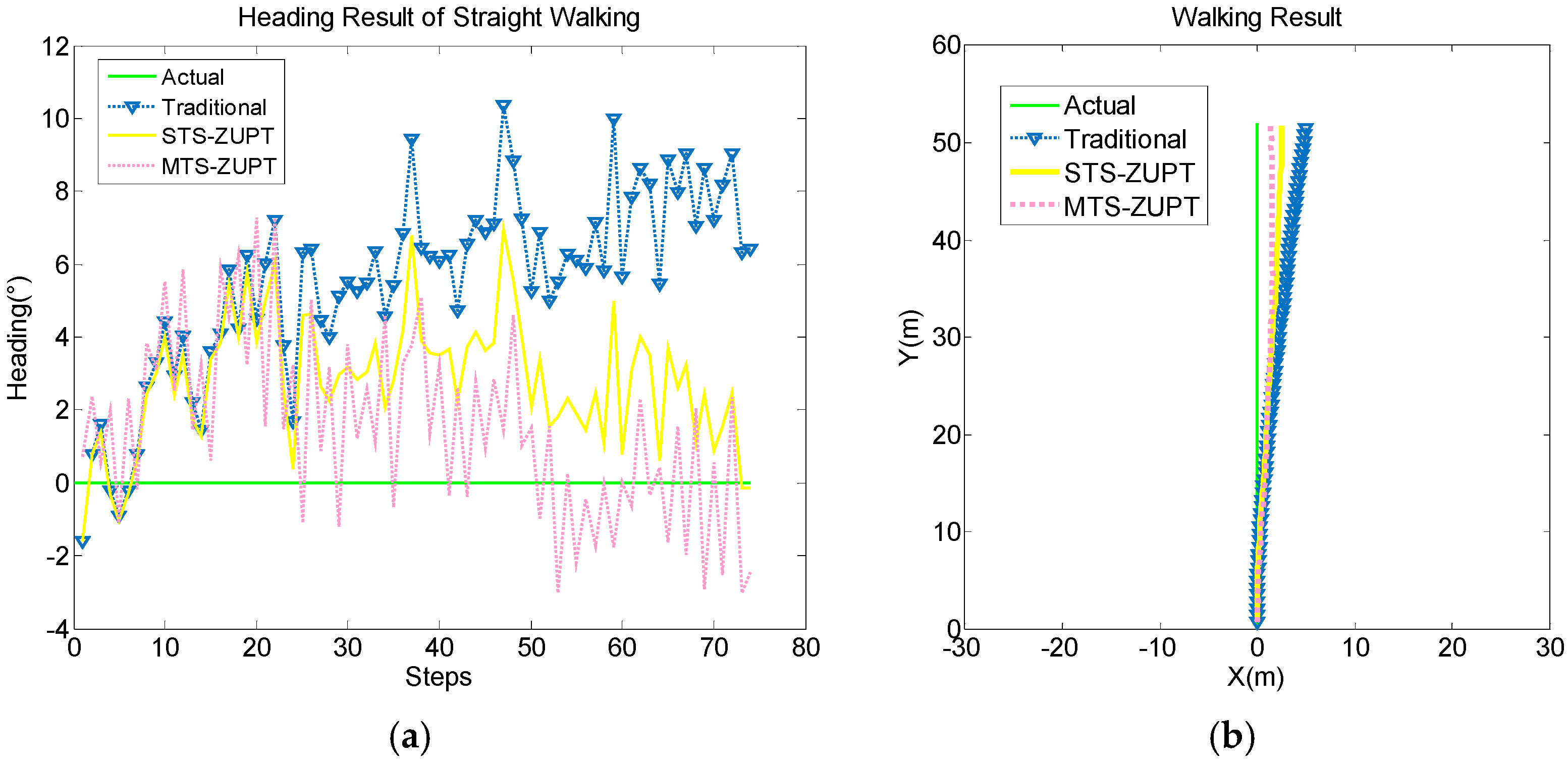
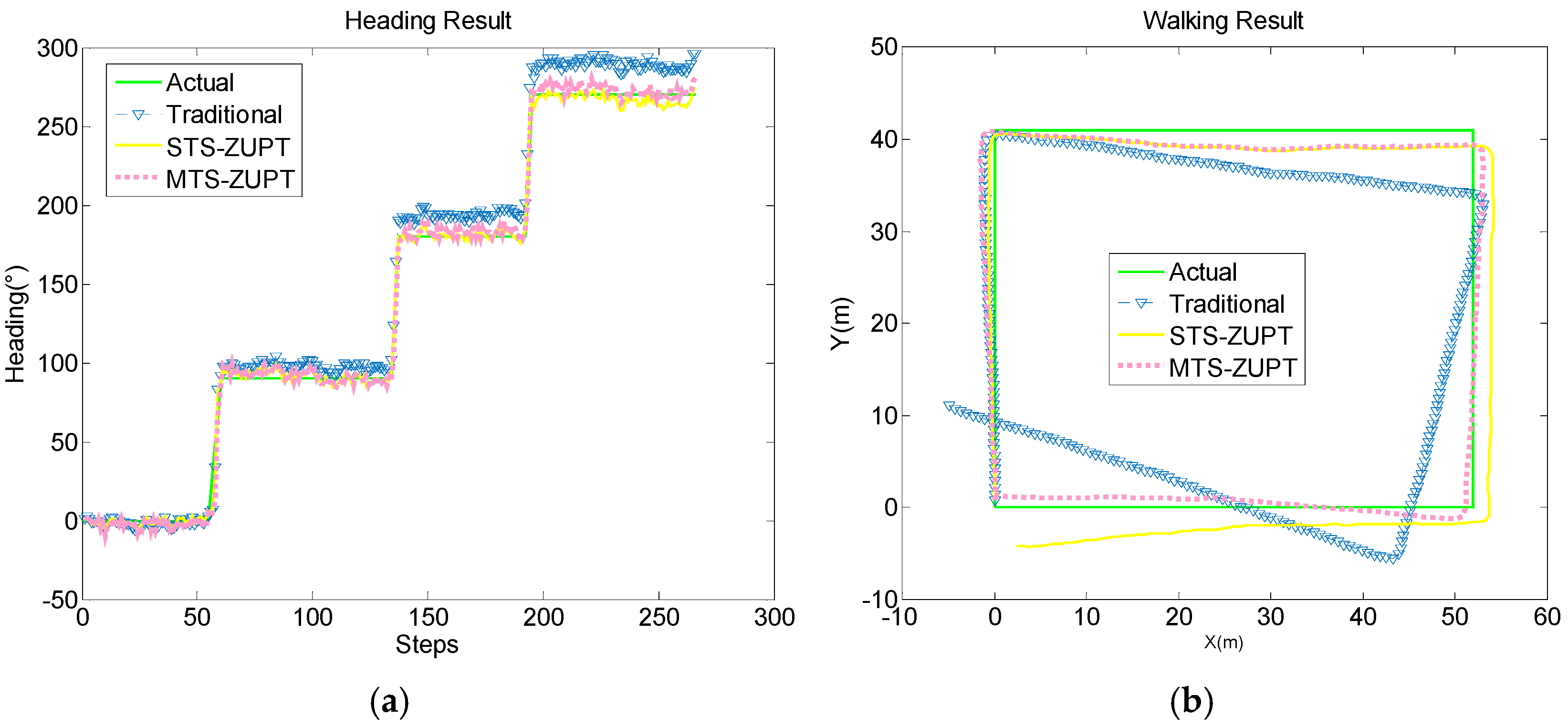
According to the Step Cycle, two kinds of S-ZUPT algorithms are proposed to realize in this paper. If the KF algorithm is applied at the middle of the two detected steps, we call it Middle Time Simulated-Zero Velocity Update (MTS-ZUPT). Corresponding to the MTS-ZUPT, using KF algorithm at step time is called Step Time Simulated-Zero Velocity Update (STS-ZUPT). We define
as Middle-time, and start filtering at the Middle-time instead of step time. The characteristics of human motion were used to construct observation model. The system and measurement formulas of the filtering system are set as following:
In Formula (4),
F(
t) is the system state matrix,
H(
t) is the system observation matrix,
G(
t) is the system noise matrix,
w(
t) is the system noise, and
v(
t) is the observed noise. After discretization solution, we can get the system discrete state estimation equation and system observation equation at time
k + 1.
where
is the transfer matrix,
I is a third-order unit matrix, and
is sampling time.
is system noise matrix, and
is the system noise.
The state quantity of the Kalman filter
consists of six parameters in the ENU (East, North and Up, ENU) coordinate system:
where
k is one of the Middle-time. And
are the roll, pitch and heading angle and the angular velocity values of the three axes of gyroscope at that moment.
The horizontal attitude angle and heading angle, which are obtained by the pedestrian dead reckoning system, and the real-time gyro output angular velocity value are taken as the observation of the system. The observation equation at
k + 1 moment can be obtained as follows:
where
and
,
is the real time angular velocity of gyroscopes, the
,
and
are pitch, roll and heading angles separately, which can be derived from the pedestrian dead reckoning system.
Limited by the characteristics of pedestrian walking, the heading angle output period is non-uniform. Based on the analysis of the periodic characteristics of the pedestrian’s steps, the time-varying discrete heading angle output period is selected:
In the iterative relationship of the above formula, is the heading angle output period, is the previous heading angle output time point, which is the last Middle-time; is the current Middle-time.
The information of attitude angle and angular velocity information calculated by the MTS-ZUPT algorithm are the optimal estimation values for each Middle-time.
4. Gravity Assisted Method
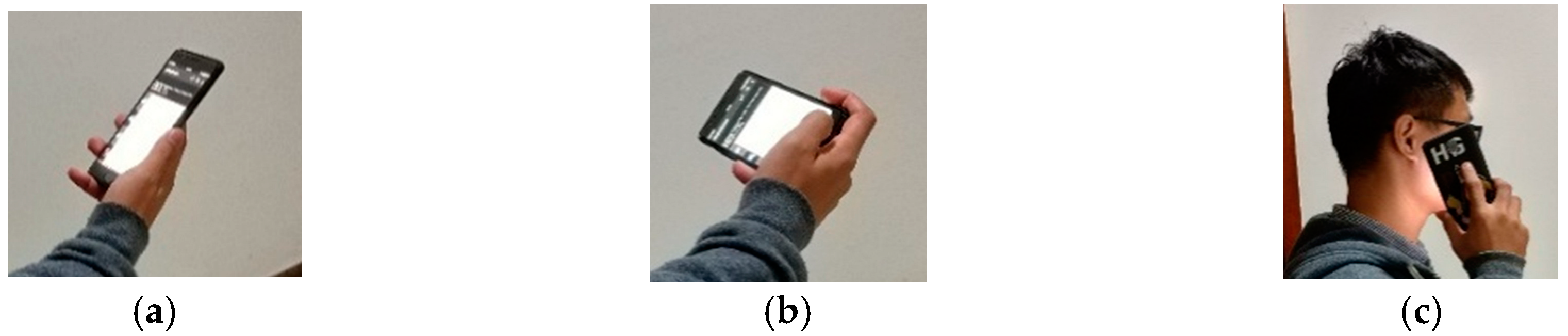
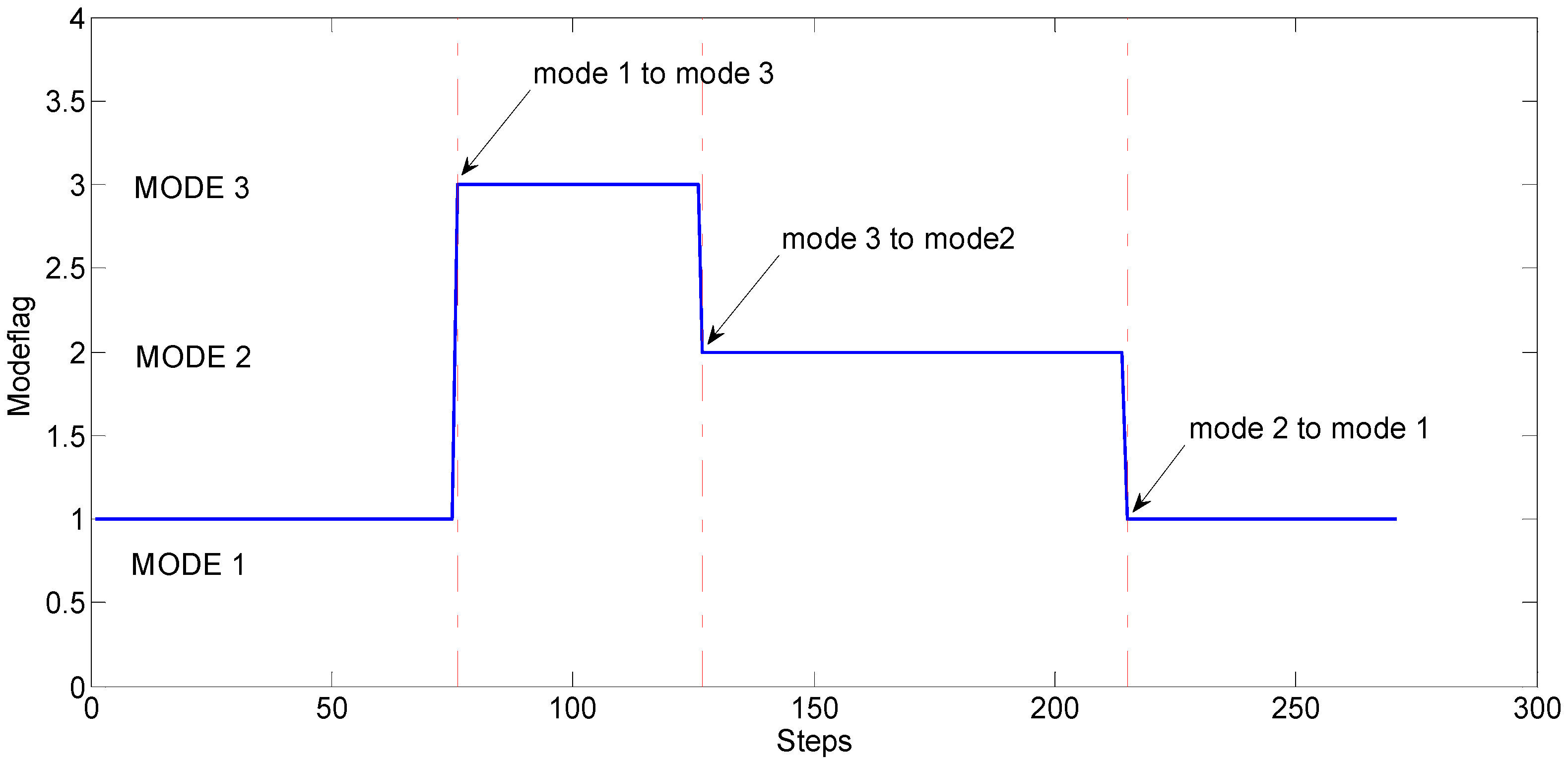
In the normal routine, we have various using-modes to carry the smartphone, such as answering the phone call, surfing the web, or even rotating the phone to landscape mode, as shown in the
Figure 4. Each mode has its special posture. For the convenience of description, we use Mode 1, Mode 2 and Mode 3 to denote the normal mode, landscape mode, and call mode, respectively.
When one using-mode switches to another using-mode in
Figure 4, there will be large attitude changes. The value of acceleration and angular rate during the process of attitude changing will be detected and recorded by the smartphone sensors, which will mislead the traditional PDR navigation system, and the heading of pedestrian will be changed to a wrong value. In this paper, after analyzing the using-modes of smartphone and the corresponding sensors output, a Gravity Assisted (GA) algorithm is proposed to compensate the heading of pedestrian navigation.
The GA algorithm is divided into two parts, the attitude discrimination method and the heading compensation process. The gravity data detected by gravimeter of smartphone has the following features:
where
means earth gravity vector,
are the gravitational acceleration vector components of
x,
y, and
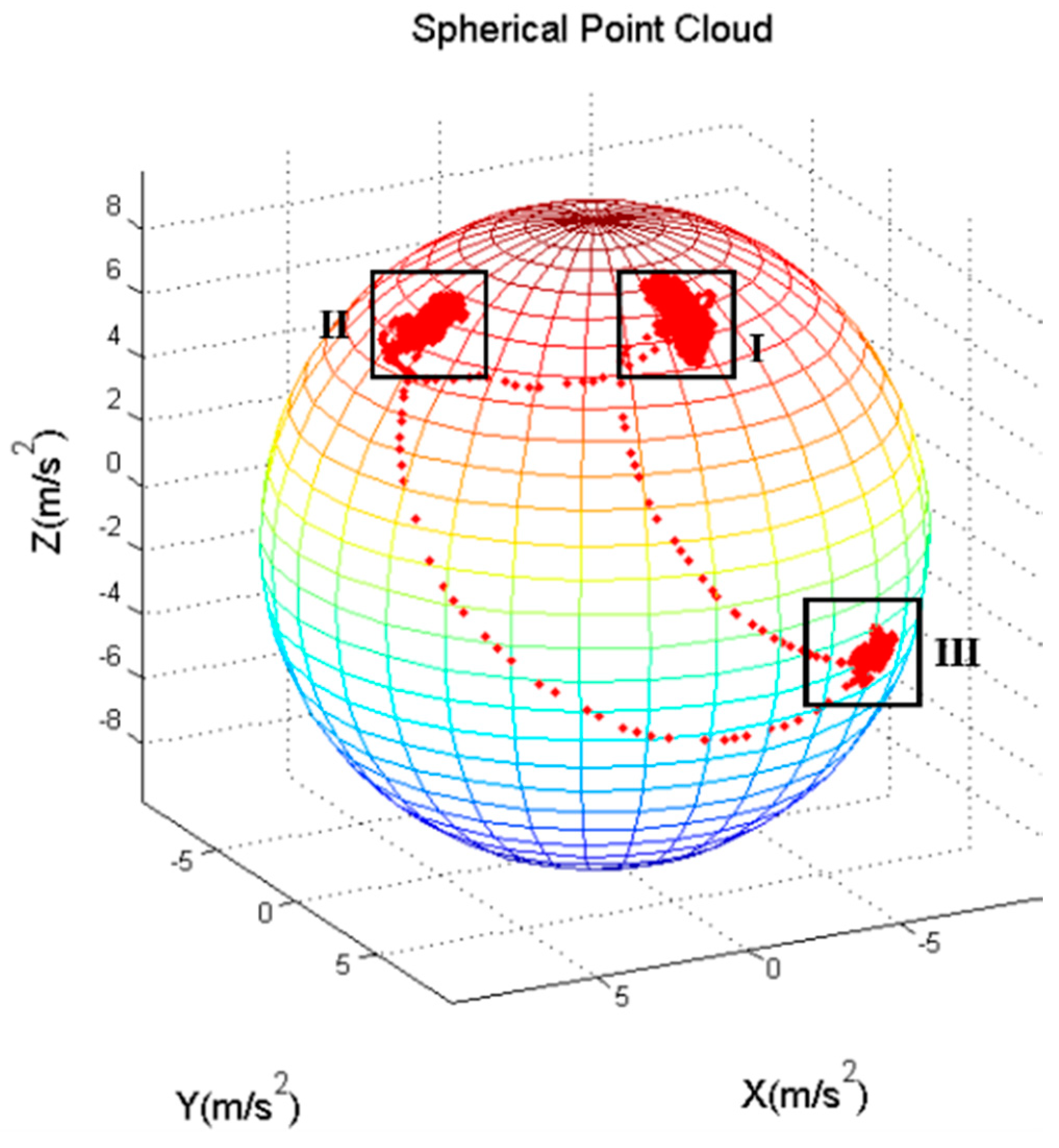
z axes of the smartphone. If the three-axis gravimeter data are projected into a three-dimensional coordinate system, a sphere can be realized, and a spherical point cloud can be seen in
Figure 5. In this Figure, each point represents the data of a sampling point. And the radius of the sphere is the local gravitational acceleration value. In addition, area I, II, III represent the gravity data projection of Mode 1, Mode 2 and Mode 3 respectively. From
Figure 5, we can find that the gravitational output data in different mode is projected in different areas, which means that the using-mode of the smartphone can be distinguished, by calculating the azimuth and elevation angle with the gravimeter data.
Formula (10) shows how to calculate the azimuth and elevation angles by gravity data.
are three output of axis gravimeters, and
are azimuth and elevation angles.
To make the calculation more convenient, all of the experiments in this paper are using smartphone by right hand. If the experimenter uses his left hand, due to the symmetry of the coordinate axes, the region can be calculated and defined easily. Considering the different using-modes of smartphone, each of the three modes has its own threshold, as shown in Formula (11).
J is flag number. 1 for Mode 1, 2 for Mode 2 and 3 for Mode 3. The thresholds in Formula (11) are statistical values, which are obtained by averaging the data of multiple experiments.
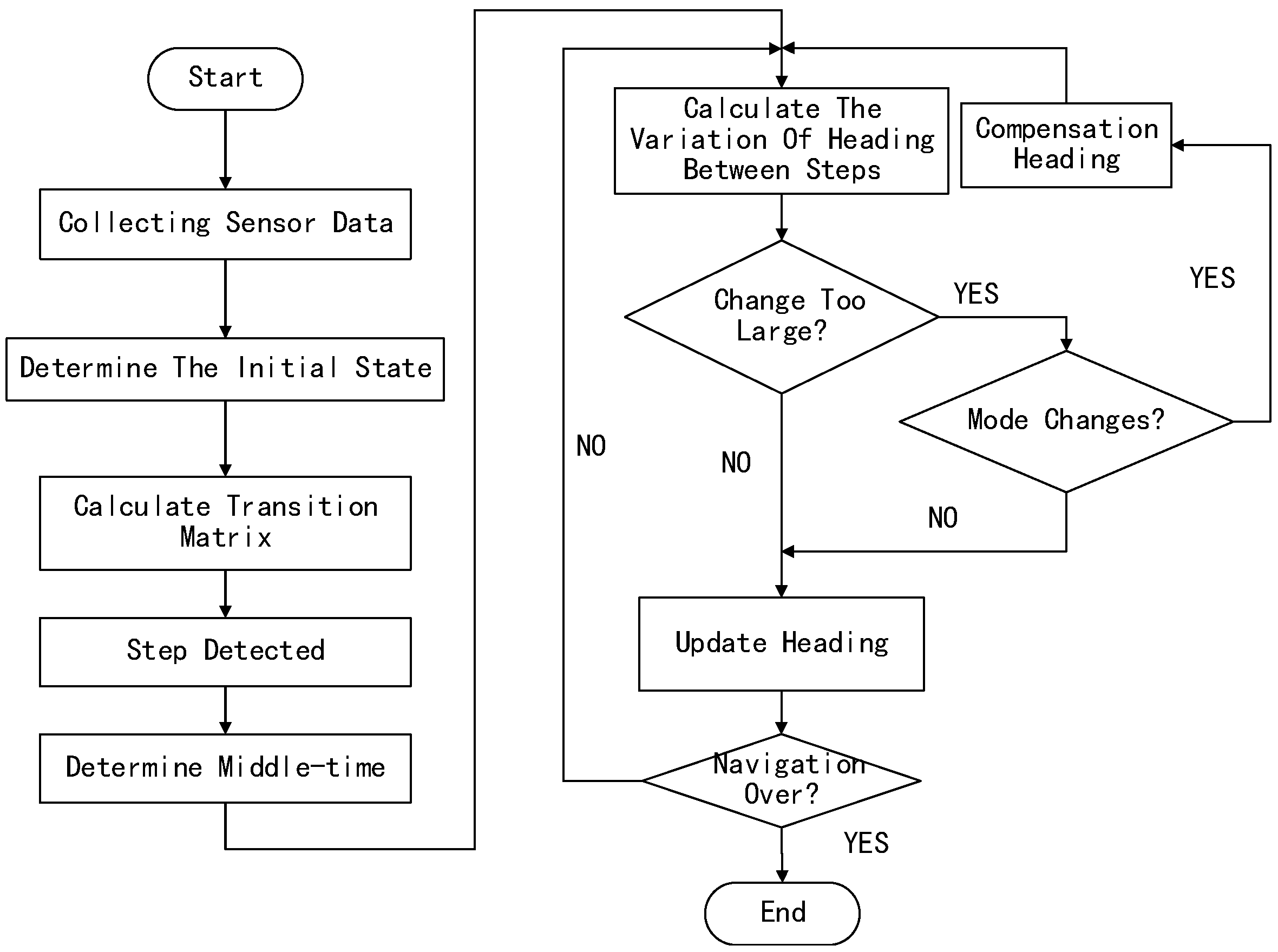
Based on the study of the relationship between three using-modes and the data of the smartphone, a new method to compensate the heading is proposed in this paper. The general process of this method is shown in
Figure 6. A specific process has been divided into the four steps as mentioned below.
(1) Collecting the sensors’ data, and judging step moment to find out the Middle-time;
(2) Monitoring the change-value of the heading between two adjacent Middle-time;
(3) According to the change-value, to check the smartphone using-mode change;
(4) If there is using-mode change, compensate the heading value.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}