1. Introduction
This paper presents a new method for estimating the flight coefficient of a fast rotating flying disc using geomagnetic field information acquired from an onboard sensor module. To achieve accurate flight characteristics of the disc such as its flying trajectory, velocity, and attitude, various inertial data and other auxiliary sensor measurements are required. Especially, this study focuses on obtaining the yaw rate and yawing moment coefficient, which play a significant role in the flight governing dynamics of a disc. Despite its importance in determining the flight states of a disc, the yawing moment coefficient is relatively less investigated than other flight coefficients. The reason for this mainly originates from the difficulty in measuring the fast rotating rate in the yaw axis, since a disc yaw rate mostly exceeds the dynamic range of conventional onboard sensors.
In previous researches, various techniques have been applied to estimate the aerodynamic coefficient and to analyze the flight characteristics of a flying disc. Recently, the computational fluid dynamics (CFD) analysis technique has been proposed but it presents a burdensome computational complexity. In reference [
1], the calculation of the lift, drag, and pitching moment coefficients is carried out by assuming a static state, in which the influence of rotation can be neglected. Then, the computation of the lateral force, rolling moment, and yawing moment, which are sensitive to the rotational rate change, is attempted by considering an air flow model equation in a constrained flight condition [
2]. In addition, some pioneering studies applying the computational fluid analysis method to characterize a flying disc in detail have been reported, which focus on estimating the flight coefficient considering the ground effect and disc shape [
3,
4]. However, most studies based on CFD provided only preliminary results because of a limited grid density, imperfect modeling in the computational method, and lack of further experimental verification. Unlike the computational fluid analysis, the wind tunnel method attempted to estimate the flight coefficient through an experimental method. A mechanism to actually rotate the flying disc was implemented inside the wind tunnel, such that it could change the flow velocity and angle of attack, to estimate the flight coefficient [
5]. However, only horizontal flight coefficients, including rolling and pitching moment, were reported with respect to the angles of attack and advance ratio because of the inevitable experimental constraints within the wind tunnel.
Even though these studies provide a concrete background for characterizing a disc’s flight dynamics, further investigation is required depending on the flight coefficient type. Specifically, static coefficients such as lift, drag, and moment coefficients in horizontal axes have been treated in depth. Also, dynamic flight coefficients in the roll and pitch axis have been provided under specific rotating conditions. However, for a more sophisticated analysis of the flight characteristics and trajectory prediction, it is essential to study the rotational moment characteristics for the vertical axis, i.e., the yaw moment coefficient. This is because the dynamic coefficient related to the yawing moment plays a significant role in determining the flight trajectory, especially during the latter periods of the flight. Note that the terminal flight trajectory highly relies on the roll stability, while the principal roll moment coefficient is coupled with the yaw rate. Thus, the yaw rate transient characteristics serve as a governing factor for roll attitude determination. Consequently, the terminal trajectory shape is greatly affected by the yaw damping derivative curve, which motivates to devise an accurate method for yaw rate computation.
Generally, the yaw rate during flight periods is very high, thus only limited methods can be applied to measure accurately the yawing moment coefficient of a rotating disc. For computing the yaw rate, a previous study employed visual measurements with the help of a high-speed camera, which in turn has limited measurement ranges due to its spatial constraints [
6]. The accelerometer-based coefficient estimation technique is suggested as an alternative method, which approximates the rotational rate via centripetal acceleration measurements [
7,
8]. Even though these methods provided fair estimation results without spatial constraints on the flight experiment, they simultaneously showed performance degradation when the sensor installment is not ideally implemented. Because of the disc’s high rotational rate properties, the computation result is very sensitive to displacements of the sensor location from the ideal center of disc. Thus, even a very small axial misalignment between the accelerometer and the center of rotation generates a large deviation in the yaw rate estimation, which may require a burdensome compensation process. Besides, the measured acceleration is very susceptible to undesired disturbances like gravity, acceleration of the rotating origin, angular accelerations, and other inertial noises.
Meanwhile, a representative measurement type independent from the inertial force is a magnetic field, which is commonly applied to attitude determination systems, indoor positioning, localization, and tracking algorithms, and integrated navigation systems. For instance, a geomagnetic measurement is adapted in satellite’s robust attitude determination problem under a measurement malfunction scenario [
9]. A preliminary result for indoor positioning is presented by designing a cluster of pulsed magnetic signals to obtain relative distances [
10]. Alternating magnetic measurements generated from multiple source coils are used for computing the distance from the transmitter node to the receiver node, and then a trilateration method is applied for localization [
11]. Recently, the study was extended to cover orientation as well as 3D localization under a spatial test region [
12]. Spectral analysis of magnetic measurement was also performed for estimating the compensation coefficients of a fluxgate sensor via the harmonic decomposition method [
13], for identifying the orbit semi-major axis regardless of satellite attitude [
14], and for designing an invasive diagnosis method to detect broken rotor bars in large induction machines [
15]. Although relevant works are scarce, the frequency domain analysis of magnetic data is expected to have wider applications because of its advantage of allowing measurement unaffected by inertial disturbance, wide bandwidth, and the penetrating characteristics of a magnetic field.
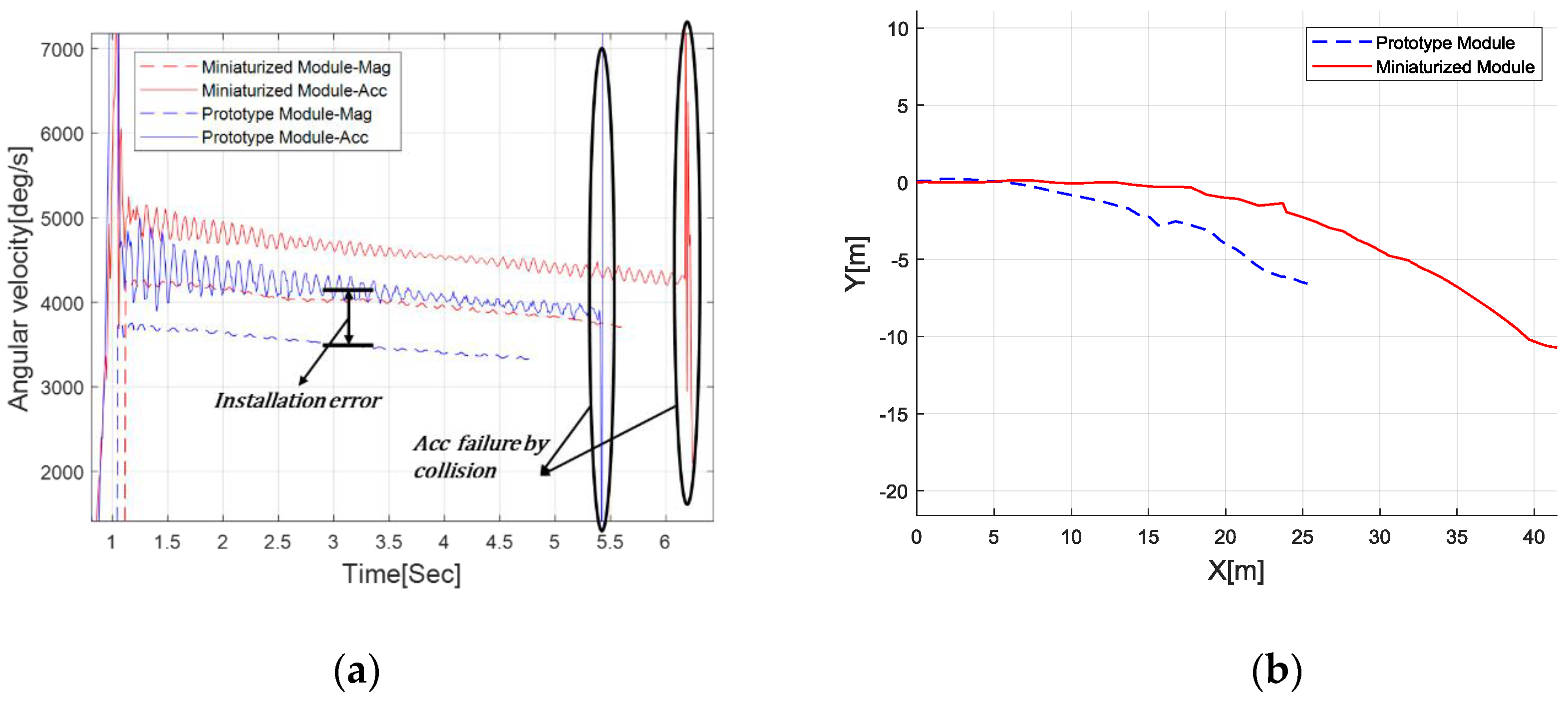
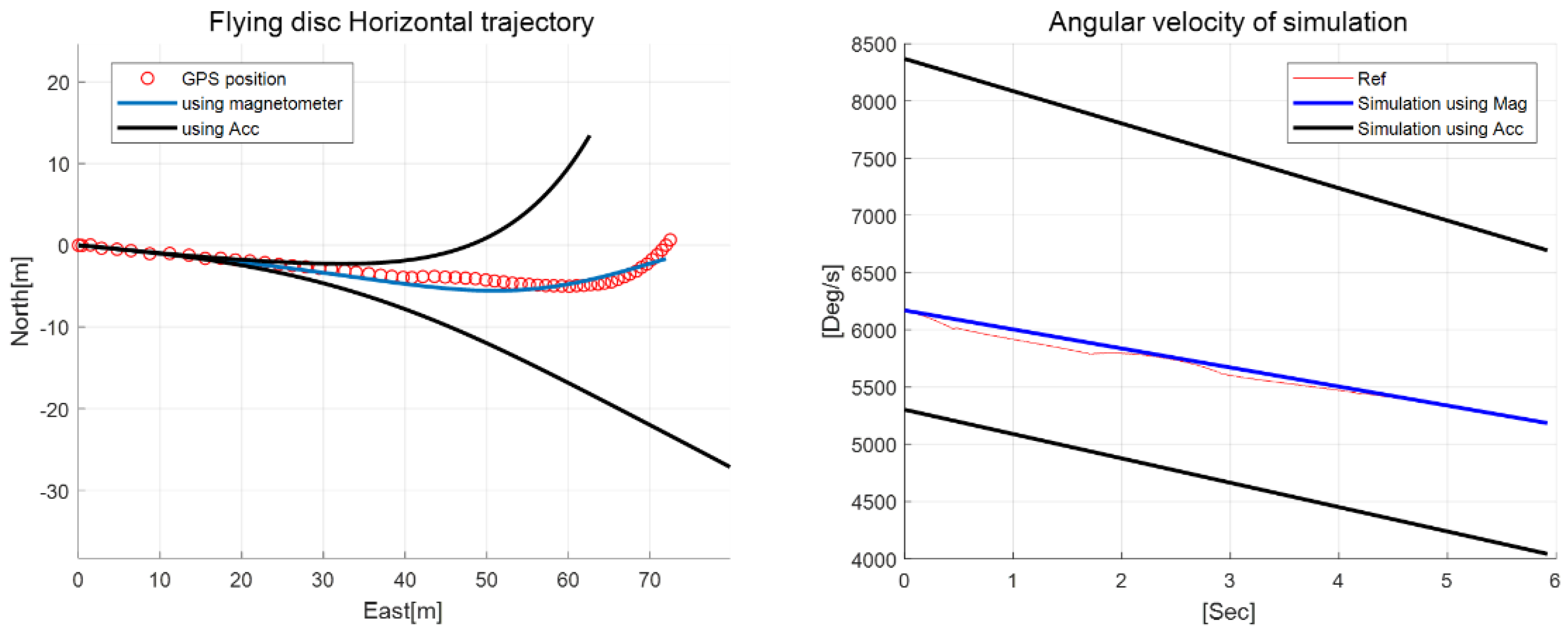
In this background, the present study suggests a new method to obtain the yaw rate of a fast rotating object and subsequently to estimate the yawing moment coefficient based on non-inertial sensor measurements. First, an algorithm for providing the yaw rate is developed, which employs a moving horizon fast Fourier transform (FFT) analysis. For the experimental verification, a miniaturized onboard sensor module is designed and manufactured to store the flight test data. Specifically, a low-cost microelectronic mechanical system (MEMS) magnetometer is used for measuring alternating geo-magnetic fields during the disc flight. For performance comparison, the estimated yaw rate is analyzed with a comparative rate measurement system and a reference rate table. Furthermore, to demonstrate the validity of the proposed method, the estimated coefficient is applied to a disc flight simulator implementing the disc aerodynamics model. In the simulator, other primary coefficients, such as lift, drag, and pitching/rolling moment, are adopted from the reference parameters of previous studies and the CFD analysis results [
2,
3,
4]. In this way, the simulator-based trajectory obtained from repeated flight test data demonstrates the validity of the presented coefficient estimation algorithm. In fact, the true reference flight trajectory is acquired from a GPS receiver onboard the sensor module, and the comparative accelerometer-based prediction is plotted for performance comparison. The rest of the paper is organized as follows.
Section 2 presents the estimation methods of the high angular rate;
Section 3 illustrates performance verification through a reference rate test;
Section 4 presents the application of the algorithm to the disc dynamics through a flight test and a simulation study; conclusions are presented in
Section 5.
3. Performance Verification through the Reference Rate Test
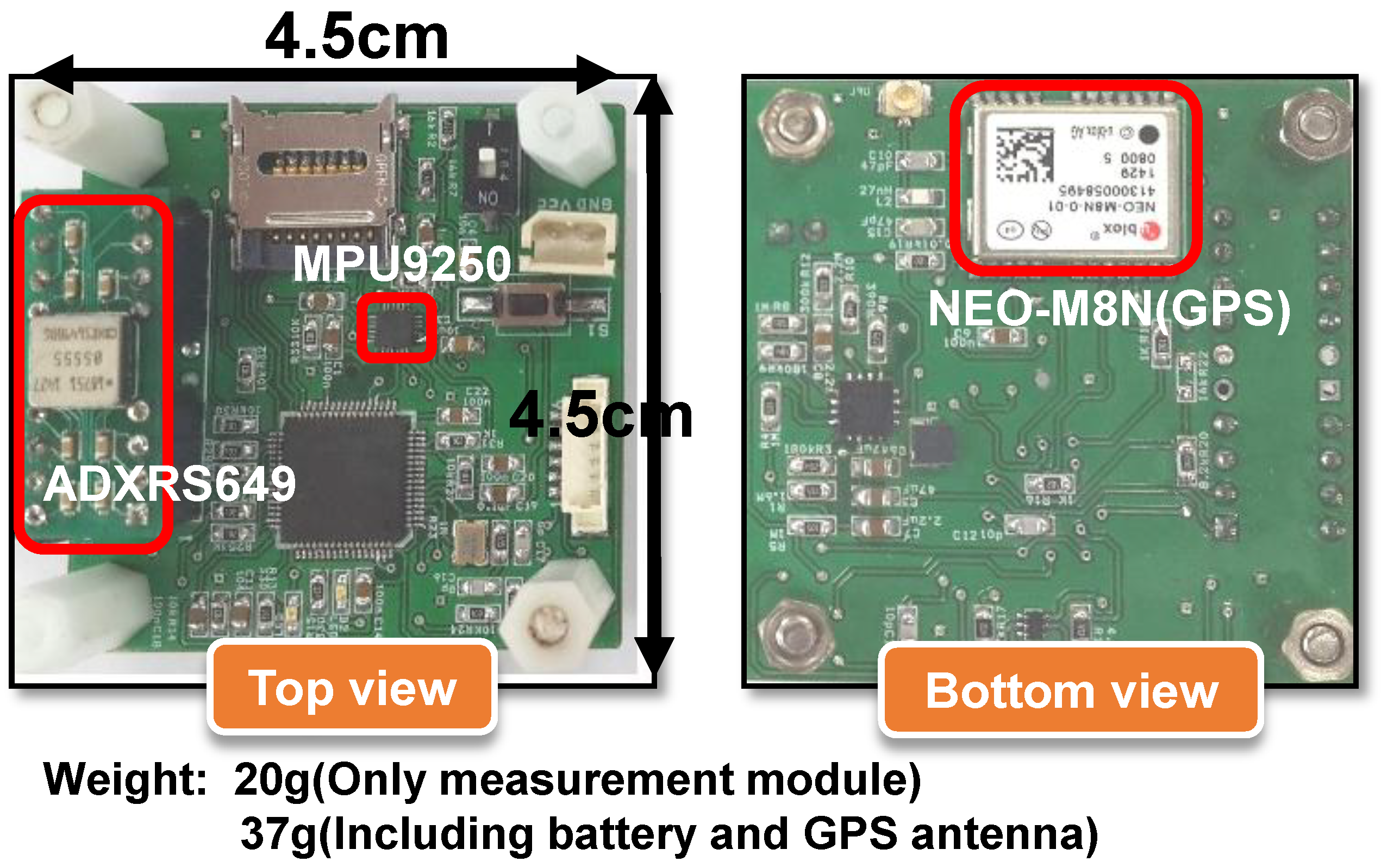
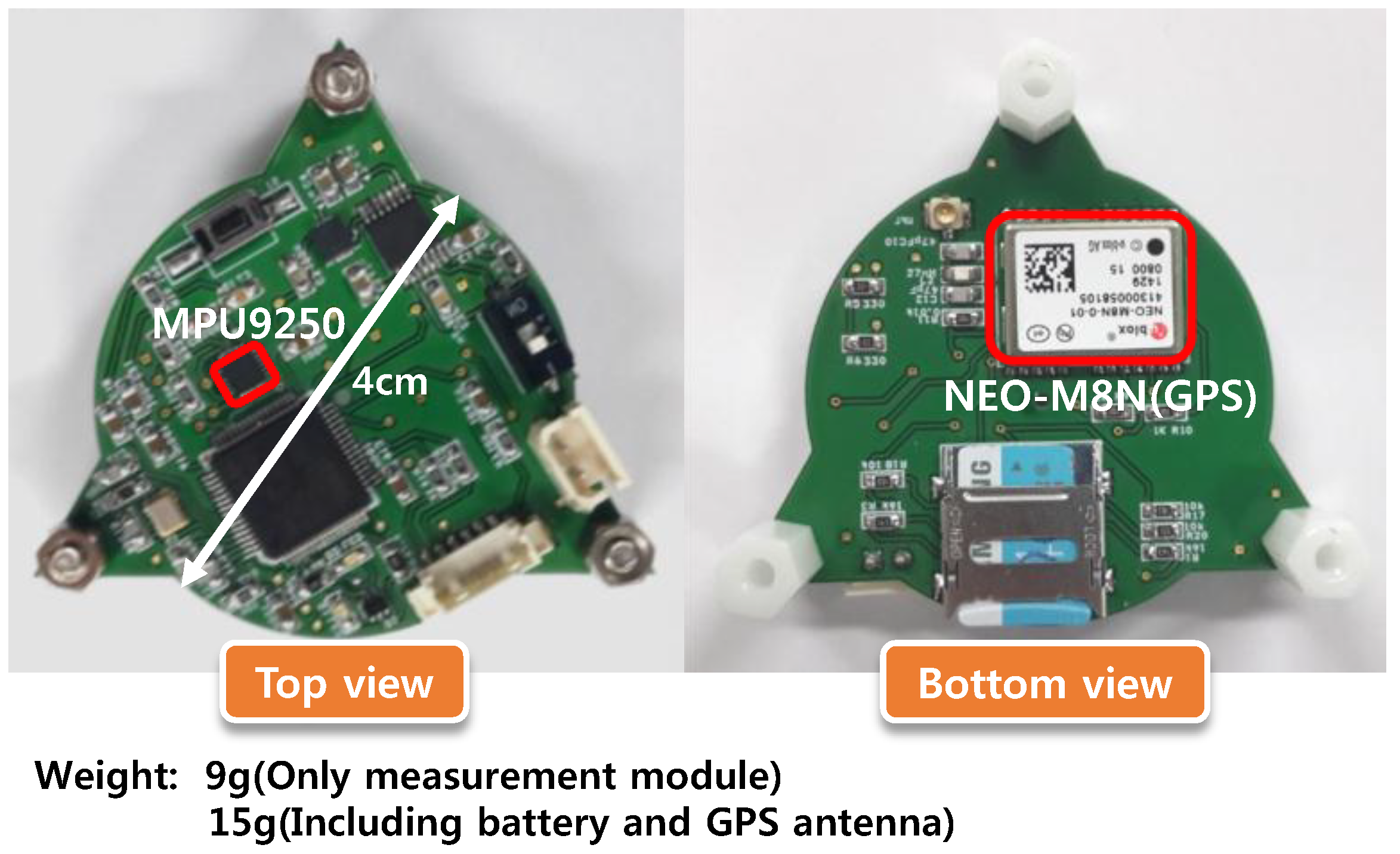
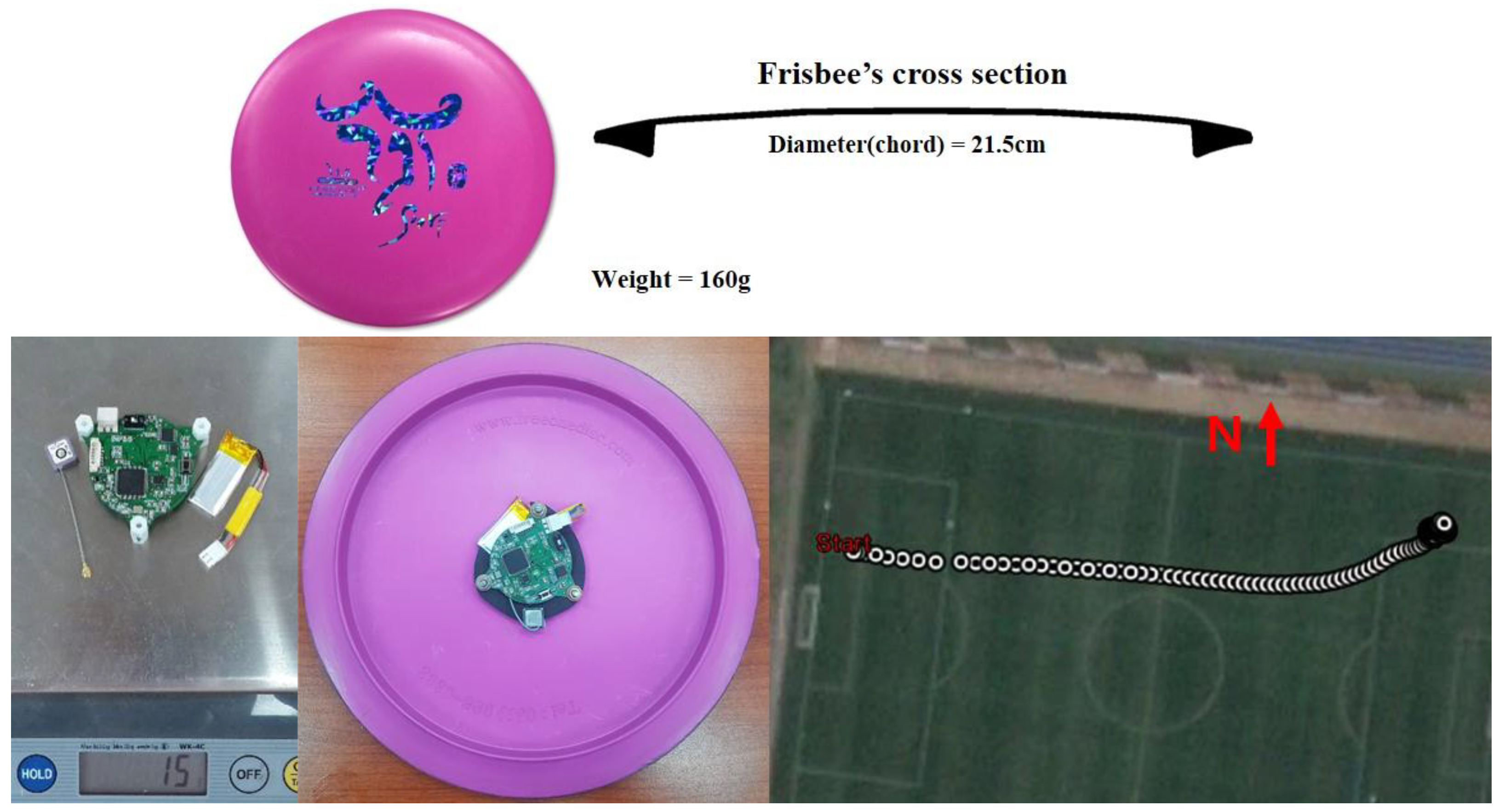
To verify the rate estimation performance of both methods, a prototype sensor module was fabricated as shown in
Figure 5. The top and bottom layout of the manufactured prototype sensor module on a PCB board can be observed in the figure. In particular, a typical MEMS IMU sensor, MPU 9250, made by Invensense Co. Ltd. (San Jose, CA, USA), was chosen to measure the inertial components of acceleration and angular rate as well as the magnetic data. An essential shortcoming for using a conventional IMU sensor is that the dynamic range is hard-limited (in case of MPU 9250, gyro saturation is observed at 2000 °/s.) In practice, most gyroscopes in a 6-DOF or 9-DOF off-the-shelf MEMS IMU have a dynamic range lower than 2000 °/s. MPU 9250 also provides three-axis magnetic data, and the resolution of the embedded magnetometer is 6 m Gauss. It is notable that, in
Figure 5, a very exceptional single-axis rate sensor (ADXRS 649, Analog Device Inc., Norwood, MA, USA) with an ultra-high dynamic range is employed in the manufactured prototype sensor module. ADXRS 649 is a bulk-type single axis gyroscope with a dynamic range up to 20000 °/s, used as a comparative reference sensor. Despite its exceptional dynamic range capacity, this bulk-type single-axis gyroscope provides less accurate rate information and, moreover, cannot be properly integrated in a miniaturized onboard module because of its bulky mass and volume. Besides, the GPS receiver, NEO-M8N (Ublox, Thalwil, Switzerland), was included for generating a true reference trajectory. For storing the sensor data, an embedded microprocessor with SD memory was installed.
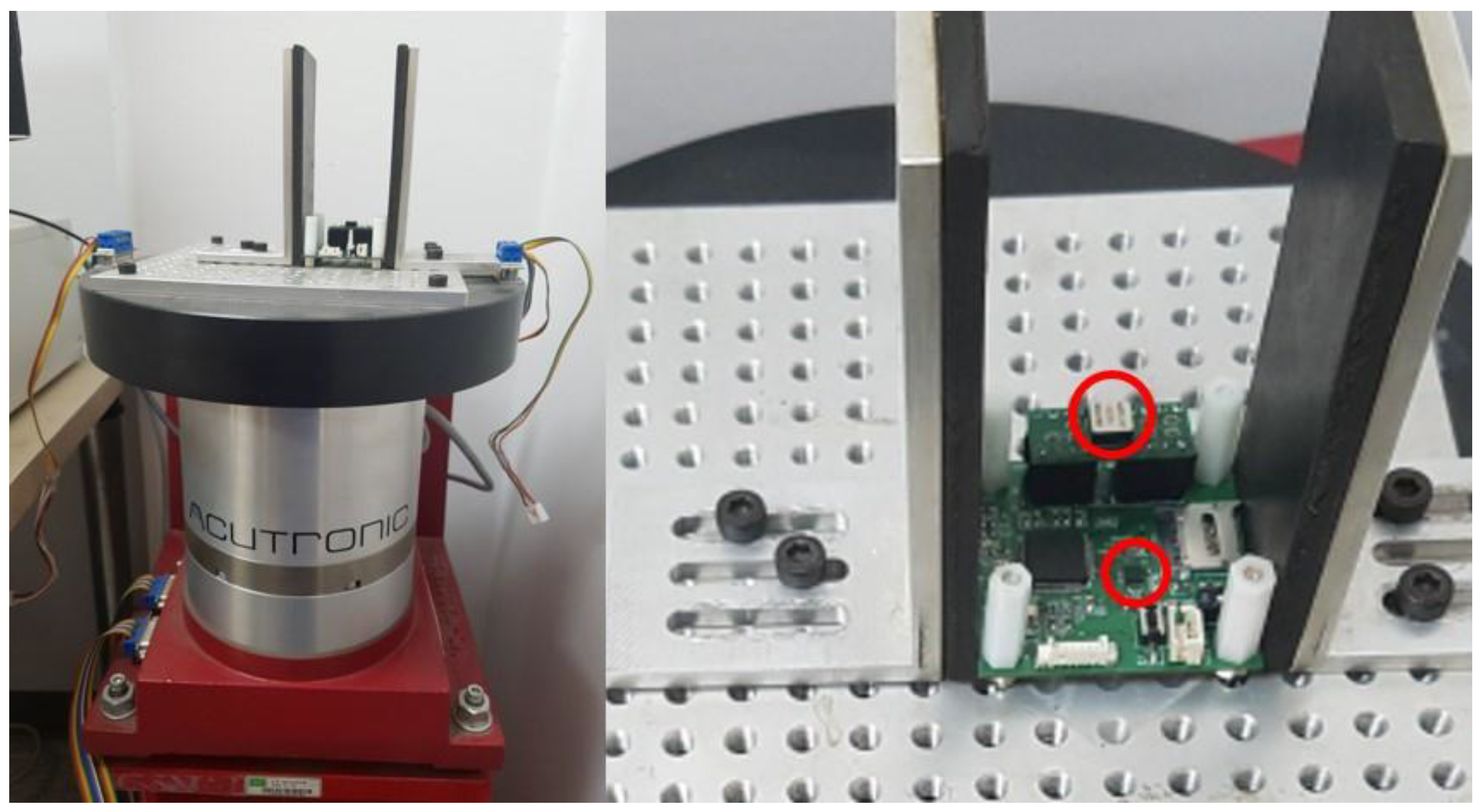
To compare the suggested algorithms, an accurate rate table experiment was performed.
Figure 6 shows the picture of the experimental setup on a rate table with the prototype sensor module installed. The reference rate table was the Acutronic’s AC1120S, whose rate accuracy is up to 0.001% of the applied rate.
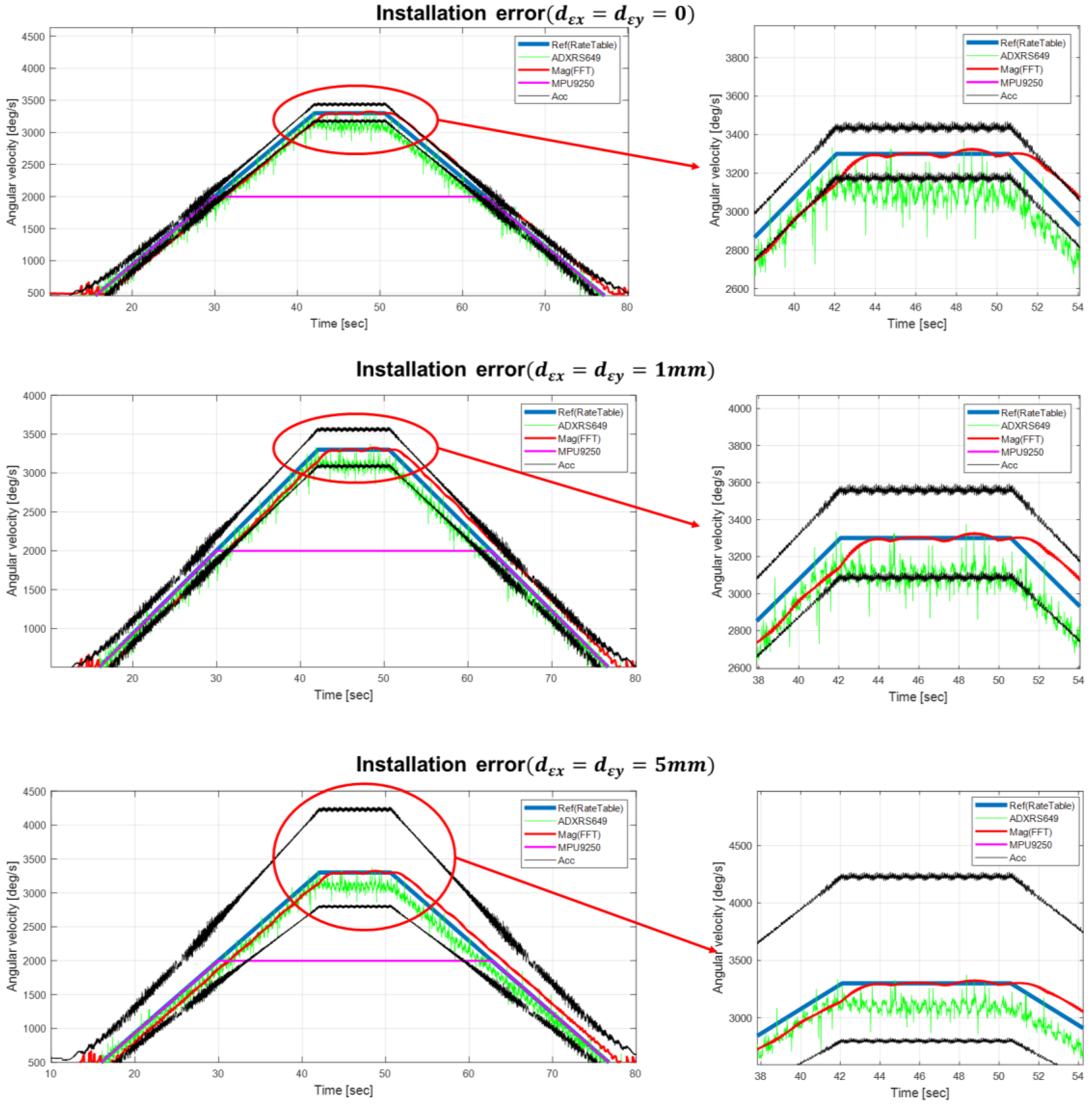
Figure 7 demonstrates the rate estimation performance of the proposed method compared with other methods. In
Figure 7, the magenta solid line is the measurement result of the angular rate of the MPU-9250, and it can be observed that saturation occurs in the high rate region. On the other hand, the green solid line is the measurement from ADXRS649, which does not saturate because of its wide dynamic range. However, the analog output of ADXRS649 contains notable white noises. Furthermore, since the parameter provided in the data sheet, i.e., the sensitivity for the output correction, is probabilistic, a calibration process using a rate table is essentially needed for an accurate application [
20]. On the other hand, the solid black lines show the upper and lower envelopes of the rate estimation result, which reflect various error factors influencing the accelerometer measurement. For a quantitative analysis of the experiment, the accelerometer’s inherent error sources (i.e., nonlinearity, cros-axis sensitivity, bias, random white noise) were assumed at their greater case values. The installation error appeared to dominate; thus, two practical cases were considered, with errors of 1 mm (
and 5 mm (
for each axis.
First, the accelerometer’s inherent error sources were considered, and conservative bounds of each error source were applied to Equation (8). Note that there was no acceleration of the B-frame origin (i.e.,
in Equation (1)), since it was obtained from a rate table experiment. Each error characteristics of the accelerometer is referred to the specification of MPU-9250; thus, the nonlinearity and cross-axis sensitivity in each axis allowed maximum uncertainties of 0.5% and 2%, respectively. Thus, in this experiment, the worst case of Equation (4) can be presented as:
Also, the accelerometer bias had a maximum uncertainty of 6% in the horizontal axis and 8% in the vertical axis. Random white noise in each axis had 0.3% uncertainty with respect to gravity. For a conservative analysis, the worst-case uncertainty is applied to the numerator and denominator terms of Equation (8), where the sensor’s specified error distribution resulted in an estimation envelope. Even though the inherent sensor characteristics decreased the rate determination accuracy, the estimation performance was more dominantly governed by the installation error present in the denominator term
. For illustrating the estimation performance corresponding to different installing errors, results from two cases are presented. The
x-axis installation error (
was applied deliberately with the ratio of 6.2% (1 mm) and 31% (5 mm), respectively, from the actual IMU position’s
x-axis (
. In
Figure 7, the second subplot shows the estimation result when assuming a 1 mm installation error, and the third subplot is the result when assuming a 5 mm installation error. As observed in Equation (8), the installation error significantly decreased the rate estimation accuracy, which highly depends on the relative distance ratio. As the installation error approached zero, the upper and lower uncertainty bound decreased around the true rate region. Note that, even with zero installation error, the uncertainty band does not converge to zero since the worst-case perturbation from the cross-axis coupled terms are still present in the denominator of Equation (8). Consequently, when the sensor module is actually mounted on the disc, the sensor module should be placed as far from the center of rotation as possible in order to minimize the cross-axis perturbation effect, while, simultaneously, the induced centripetal acceleration should be within the input range of the accelerometer.
Finally, the red solid line in
Figure 7 represents the estimated angular rate of the proposed algorithm when using a magnetometer. Compared with other methods, the rate estimation of the proposed algorithm provides the most accurate result, free from mechanical interferences, misalignment, and electrical noises. It is also revealed through repeated tests that the presented method provides consistency in the estimation performance, even with a distributed location of the sensor module. Furthermore, note that the proposed method has the advantage that a calibration procedure of the magnetometer’s raw data is not required, since an offset or scale factor mismatch does not affect the spectral distribution of the magnetic measurement data. This implies that a tedious sensor calibration process to remove the hard- and soft-iron effect is unnecessary. In conclusion, despite a small distortion in the rate estimate result, the mean accuracy during the overall estimation periods proved to be superior to that of other comparative methods in the high angular rate region.
[Remark] Despite its accuracy of the rate estimation in the high angular rate region, some drawbacks were observed. First, a small distortion on the estimation result, even at a static rate input, was observed, as shown in the enlarged portion of
Figure 7. In fact, since a low-grade magnetometer was embedded in the MPU-9250 chipset, its bandwidth was slow, and the sampling rate was not sufficient for providing alternating geomagnetic measurements precisely. Also, the embedded microprocessor had limited computing performance, thus a noticeable magnetic data loss was observed. Consequently, these measurement imperfections of the onboard magnetometer induced a distortion in the estimation results. From a computational viewpoint, a spectral analysis may increase the computational burden compared with the acceleration-based method. Also, a slight delay in the estimation results is observed in
Figure 7, which was caused by the moving-window approach in implementing the FFT algorithm. For offline applications, this delay can be compensated through shifting the estimation result by half of the window period. Besides, to achieve spectral separation effectively from low-frequency band interferences, a threshold yielding an effective estimation range was employed. With this threshold, the proposed method generically possesses a limited estimation performance in the low rotation rate region. In the implementation for disc analysis, a threshold of 500 °/s was designed considering the typical flight conditions of the disc. Lastly, a real-time implementation was not applied in the present work, thus an improved embedded sensor platform and computing optimization are left for further investigation.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














