Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders


Abstract
:1. Introduction
2. Materials and Methods
2.1. A Model of Positioning Accuracy and Availability in Hydrographic Surveys According to the IHO Standards
2.2. A Measurement Assessment of the Compliance of DGPS, EGNOS, and Multi-GNSS with the Positioning Requirements for the IHO orders
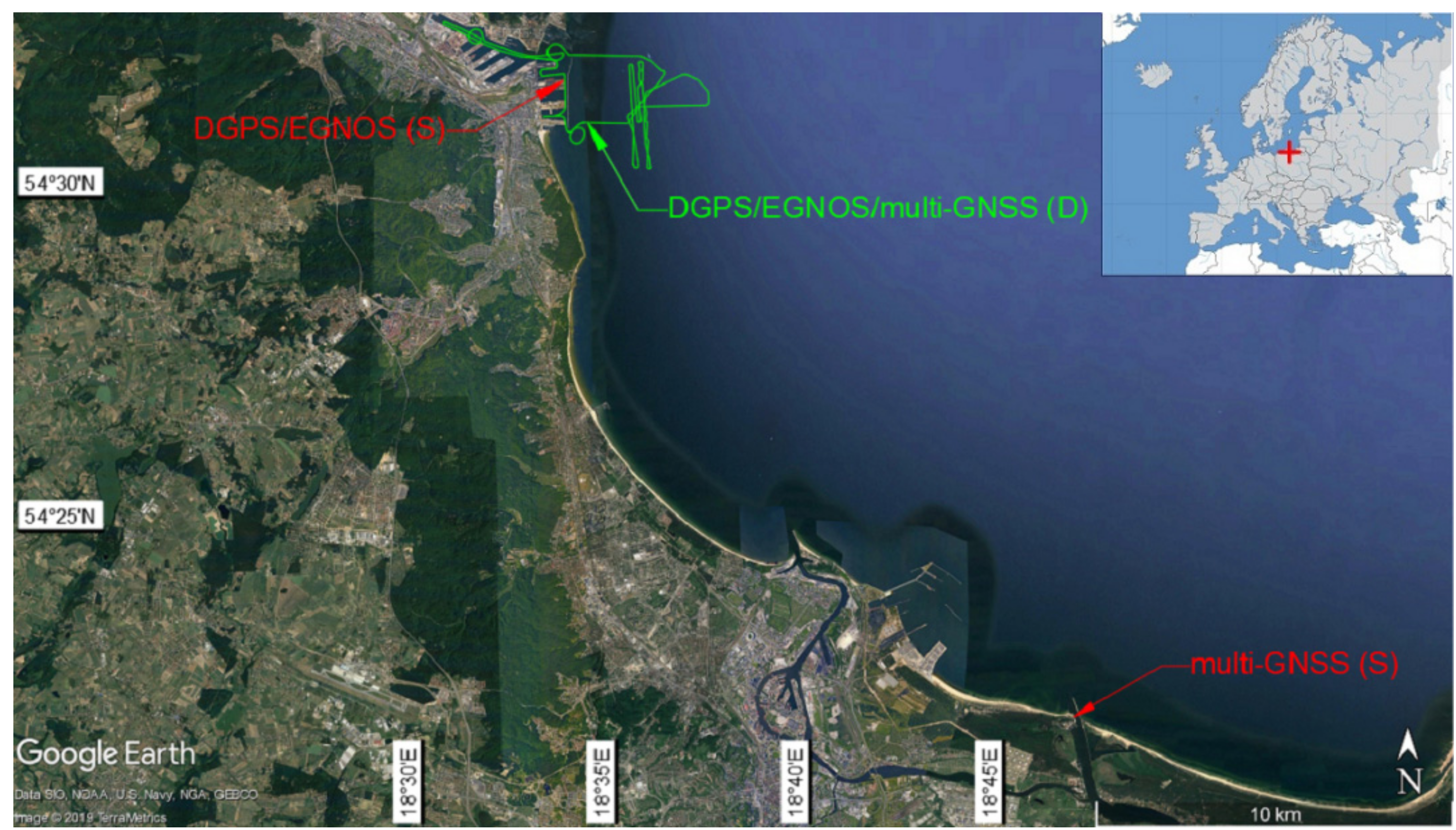
- Stationary measurements of the DGPS and EGNOS systems carried out on the radio beacon in the port of Gdynia in April and May 2014. As part of the study, two receivers were used: Leica MX-Marine (DGPS) and Topcon Legacy-E (EGNOS), which simultaneously recorded their position coordinates with a frequency of 1 Hz. During the several-day measurement campaign, the accuracy statistics of these systems were determined based on nearly 1 million positions (Table 1) [35].
- Dynamic measurements of the DGPS and EGNOS systems carried out during vessel manoeuvring on the Gdańsk Bay on 20 June 2017. As part of the study, two receivers were used: Simrad MXB5 (DGPS) and Trimble GA530 (EGNOS), which simultaneously recorded their position coordinates with a frequency of 1 Hz. The obtained values were compared with the precise GNSS receivers (Trimble R10), using corrections from an active geodetic network with an accuracy of 2–3 cm (p = 0.95). During a 4-hour measurement session, the accuracy statistics of these systems were determined based on approximately 11,500 positions (Table 1) [37].
- Stationary measurements of the multi-GNSS systems using the example of Samsung Galaxy smartphones, carried out on the rooftop of the National Sailing Centre in Gdańsk on 17 July 2017. As part of the study, the following smartphones were used: S2, S3 Mini, S4, S5, S6, S7, and Y, whose coordinates (antennas) were determined using geodetic methods, and with their use, a round-the-clock measurement campaign was carried out. It consisted of parallel registration of position coordinates by all telephones. During a 24-hour measurement session, between 71,438 and 86,371 positions were registered depending on the smartphone model (Table 2) [38].
- Dynamic measurements of the multi-GNSS systems using the example of Samsung Galaxy smartphones, carried out during vessel manoeuvring on the Gdańsk Bay on 20 June 2017. For the comparative analysis, five Samsung Galaxy S series smartphones were used, namely: 3 Mini, 4, 5, 6, 7, and one Galaxy Y. As part of the parallel tracking studies, the telephone positions were compared to those of precise GNSS receivers (Trimble R10) using corrections from an active geodetic network with an accuracy of 2–3 cm (p = 0.95). As a result of the 4-hour measurement, the accuracy statistics for each of the phone models were defined based on approximately 10,000 positions (Table 3) [36].
3. Results and Discussion
4. Conclusions
Funding
Conflicts of Interest
References
- EC. European Radio Navigation Plan; Version 1.1; EC: Luxembourg, Luxembourg, 2018. [Google Scholar]
- GLA. GLA Radio Navigation Plan; GLA: Harwich-London, UK, 2007. [Google Scholar]
- SMA. Swedish Radio Navigation Plan, Policy and Plans; SMA: Norrköping, Sweden, 2009. [Google Scholar]
- U.S. DoD. 2017 Federal Radionavigation Plan; U.S. DoD: Springfield, VA, USA, 2017.
- IHO. IHO Standards for Hydrographic Surveys, Special Publication No. 44, 5th ed.; IHO: Monaco, Monaco, 2008. [Google Scholar]
- GSA. Report on Rail User Needs and Requirements; Version 1.0; GSA: Prague, Czech Republic, 2018.
- ICAO. Convention on International Civil Aviation of 7th December 1944; ICAO: Montreal, QC, Canada, 1944. [Google Scholar]
- Reid, T.G.R.; Houts, S.E.; Cammarata, R.; Mills, G.; Agarwal, S.; Vora, A.; Pandey, G. Localization Requirements for Autonomous Vehicles. In Proceedings of the WCX SAE World Congress Experience 2019, Detroit, MI, USA, 9–11 April 2019. [Google Scholar]
- IALA. NAVGUIDE 2018 Marine Aids to Navigation Manual, 8th ed.; IALA: Saint-Germain-en-Laye, France, 2018. [Google Scholar]
- U.S. DoD. Global Positioning System Standard Positioning Service Signal Specification, 1st ed.; U.S. DoD: Arlington County, VA, USA, 1993.
- U.S. DoD. Global Positioning System Standard Positioning Service Performance Standard, 3rd ed.; U.S. DoD: Arlington County, VA, USA, 2001.
- U.S. DoD. Global Positioning System Standard Positioning Service Performance Standard, 4th ed.; U.S. DoD: Arlington County, VA, USA, 2008.
- Kim, J.; Song, J.; No, H.; Han, D.; Kim, D.; Park, B.; Kee, C. Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flachen Korrektur Parameter Correction. ISPRS Int. J. GeoInf. 2017, 6, 222. [Google Scholar] [CrossRef]
- Le Faucheur, A.; Chaudru, S.; de Mullenheim, P.Y.; Noury-Desvaux, B. Impact of the EGNOS Feature and Environmental Conditions on GPS Accuracy during Outdoor Walking. In Proceedings of the 5th International Conference on Ambulatory Monitoring of Physical Activity and Movement, Bethesda, Washington, DC, USA, 21–23 June 2017. [Google Scholar]
- Specht, C.; Smolarek, L.; Pawelski, J.; Specht, M.; Dąbrowski, P. Polish DGPS System: 1995–2017—Study of Positioning Accuracy. Pol. Marit. Res. 2019, 26, 15–21. [Google Scholar] [CrossRef]
- Wajszczak, E.; Galas, D. EGNOS—Use of GPS System for Approach Procedures. Adv. Sci. Technol. Res. J. 2013, 7, 62–65. [Google Scholar] [CrossRef]
- Yoon, D.; Kee, C.; Seo, J.; Park, B. Position Accuracy Improvement by Implementing the DGNSS-CP Algorithm in Smartphones. Sensors 2016, 16, 910. [Google Scholar] [CrossRef]
- Engelbrecht, J.; Booysen, M.J.; van Rooyen, G.J.; Bruwer, F.J. Survey of Smartphone-Based Sensing in Vehicles for Intelligent Transportation System Applications. IET Intell. Transp. Syst. 2015, 9, 924–935. [Google Scholar] [CrossRef]
- Geng, J.; Jiang, E.; Li, G.; Xin, S.; Wei, N. An Improved Hatch Filter Algorithm towards Sub-Meter Positioning Using only Android Raw GNSS Measurements without External Augmentation Corrections. Remote Sens. 2019, 11, 1679. [Google Scholar] [CrossRef]
- Liu, W.; Shi, X.; Zhu, F.; Tao, X.; Wang, F. Quality Analysis of Multi-GNSS Raw Observations and a Velocity-Aided Positioning Approach Based on Smartphones. Adv. Space Res. 2019, 63, 2358–2377. [Google Scholar] [CrossRef]
- Odolinski, R.; Teunissen, P.J.G. An Assessment of Smartphone and Low-Cost Multi-GNSS Single-Frequency RTK Positioning for Low, Medium and High Ionospheric Disturbance Periods. J. Geod. 2019, 93, 701–722. [Google Scholar] [CrossRef]
- Saeedi, S.; Moussa, A.; El-Sheimy, N. Context-Aware Personal Navigation Using Embedded Sensor Fusion in Smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef]
- Wang, D.; Park, S.; Fesenmaier, D.R. The Role of Smartphones in Mediating the Touristic Experience. J. Travel Res. 2011, 51, 371–387. [Google Scholar] [CrossRef] [Green Version]
- Chen, B.; Gao, C.; Liu, Y.; Sun, P. Real-Time Precise Point Positioning with a Xiaomi MI 8 Android Smartphone. Sensors 2019, 19, 2835. [Google Scholar] [CrossRef]
- Paziewski, J.; Sieradzki, R.; Baryla, R. Signal Characterization and Assessment of Code GNSS Positioning with Low-Power Consumption Smartphones. GPS Solut. 2019, 23, 98. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Zhao, J.; Zhou, K.; Wang, Z.; Yuan, H. Smart Device-Supported BDS/GNSS Real-Time Kinematic Positioning for Sub-Meter-Level Accuracy in Urban Location-Based Services. Sensors 2016, 16, 2201. [Google Scholar] [CrossRef]
- Makar, A. Dynamic Tests of ASG-EUPOS Receiver in Hydrographic Application. In Proceedings of the 18th International Multidisciplinary Scientific GeoConference SGEM 2018, Albena, Bulgaria, 30 June–9 July 2018. [Google Scholar]
- Specht, C.; Makar, A.; Specht, M. Availability of the GNSS Geodetic Networks Position during the Hydrographic Surveys in the Ports. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 657–661. [Google Scholar] [CrossRef]
- Stateczny, A.; Grońska, D.; Motyl, W. Hydrodron—New Step for Professional Hydrography for Restricted Waters. In Proceedings of the 2018 Baltic Geodetic Congress, Gdańsk, Poland, 21–23 June 2018. [Google Scholar]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. Int. J. GeoInf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Specht, C.; Mania, M.; Skóra, M.; Specht, M. Accuracy of the GPS Positioning System in the Context of Increasing the Number of Satellites in the Constellation. Pol. Marit. Res. 2015, 22, 9–14. [Google Scholar] [CrossRef]
- Specht, C.; Rudnicki, J. A Method for the Assessing of Reliability Characteristics Relevant to an Assumed Position-Fixing Accuracy in Navigational Positioning Systems. Pol. Marit. Res. 2016, 23, 20–27. [Google Scholar] [CrossRef]
- Specht, C. Availability, Reliability and Continuity Model of Differential GPS Transmission. Annu. Navig. 2003, 5, 1–85. [Google Scholar]
- Barlow, R.E.; Proschan, F. Statistical Theory of Reliability and Life Testing: Probability Models; Holt, Rinehart and Winston: New York, NY, USA, 1974. [Google Scholar]
- Sniegocki, H.; Specht, C.; Specht, M. Testing Accuracy of Maritime DGPS System Based on Long-Term Measurements Campaigns over the Years 2006–2014. Int. J. Civ. Eng. Technol. 2014, 5, 1–8. [Google Scholar]
- Specht, C.; Dąbrowski, P.; Pawelski, J.; Specht, M.; Szot, T. Comparative Analysis of Positioning Accuracy of GNSS Receivers of Samsung Galaxy Smartphones in Marine Dynamic Measurements. Adv. Space Res. 2019, 63, 3018–3028. [Google Scholar] [CrossRef]
- Specht, C.; Pawelski, J.; Smolarek, L.; Specht, M.; Dąbrowski, P. Assessment of the Positioning Accuracy of DGPS and EGNOS Systems in the Bay of Gdansk Using Maritime Dynamic Measurements. J. Navig. 2019, 72, 575–587. [Google Scholar] [CrossRef]
- Szot, T.; Specht, C.; Specht, M.; Dabrowski, P.S. Comparative Analysis of Positioning Accuracy of Samsung Galaxy Smartphones in Stationary Measurements. PLoS ONE 2019, 14, e0215562. [Google Scholar] [CrossRef]
- Moore, T.; Hill, C.; Monteiro, L. Is DGPS Still a Good Option for Mariners? J. Navig. 2001, 54, 437–446. [Google Scholar] [CrossRef]
- Ciecko, A.; Grunwald, G.; Cwiklak, J.; Popielarczyk, D.; Templin, T. EGNOS Performance Monitoring at Newly Established GNSS Station in Polish Air Force Academy. In Proceedings of the 16th International Multidisciplinary Scientific GeoConference SGEM 2016, Albena, Bulgaria, 30 June–6 July 2016. [Google Scholar]
- Grunwald, G.; Bakuła, M.; Ciećko, A. Study of EGNOS Accuracy and Integrity in Eastern Poland. Aeronaut. J. 2016, 120, 1275–1290. [Google Scholar] [CrossRef]
- GSA. EGNOS Open Service (OS) Service Definition Document; Version 2.3; GSA: Prague, Czech Republic, 2017.
- Felski, A.; Nowak, A. Has EGNOS Its Own Place in Maritime Navigation? In Proceedings of the 2015 International Association of Institutes of Navigation World Congress, Prague, Czech Republic, 20–23 October 2015. [Google Scholar]
- Kelner, J.M.; Ziółkowski, C.; Nowosielski, L.; Wnuk, M. Reserve Navigation System for Ships Based on Coastal Radio Beacons. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Savannah, GA, USA, 11–14 April 2016. [Google Scholar]
- Sadowski, J.; Stefański, J. Asynchronous Phase-Location System. J. Mar. Eng. Technol. 2017, 16, 400–408. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Statistics of Position Error | DGPS 2014 (S) | EGNOS 2014 (S) | DGPS 2017 (D) | EGNOS 2017 (D) |
|---|---|---|---|---|
| Number of measurements | 951,698 | 927,553 | 11,751 | 11,698 |
| 2DRMS (2D) | 0.96 m | 3.27 m | 1.48 m | 2.39 m |
| R95 (2D) | 0.83 m | 2.31 m | 1.42 m | 1.79 m |
| Statistics of Position Error | Samsung Galaxy Series | |||||
|---|---|---|---|---|---|---|
| Y | S3 Mini | S4 | S5 | S6 | S7 | |
| Number of measurements | 73,699 | 71,438 | 86,290 | 86,346 | 86,371 | 86,355 |
| 2DRMS (2D) | 5.61 m | 6.79 m | 2.04 m | 2.06 m | 13.69 m | 8.93 m |
| R95 (2D) | 4.93 m | 3.76 m | 1.65 m | 1.76 m | 12.64 m | 8.39 m |
| Statistics of Position Error | Samsung Galaxy Series | |||||
|---|---|---|---|---|---|---|
| Y | S3 Mini | S4 | S5 | S6 | S7 | |
| Number of measurements | 6,041 | 3,410 | 10,950 | 10,939 | 10,906 | 10,926 |
| 2DRMS (2D) | 9.47 m | 5.23 m | 6.59 m | 6.72 m | 8.32 m | 10.54 m |
| R95 (2D) | 6.84 m | 3.67 m | 5.80 m | 5.77 m | 9.38 m | 9.62 m |
| Year. | System | Special Order | Order 1a/1b | Order 2 | |||
|---|---|---|---|---|---|---|---|
| Availability | Availability | Availability | |||||
| Stationary | Dynamic | Stationary | Dynamic | Stationary | Dynamic | ||
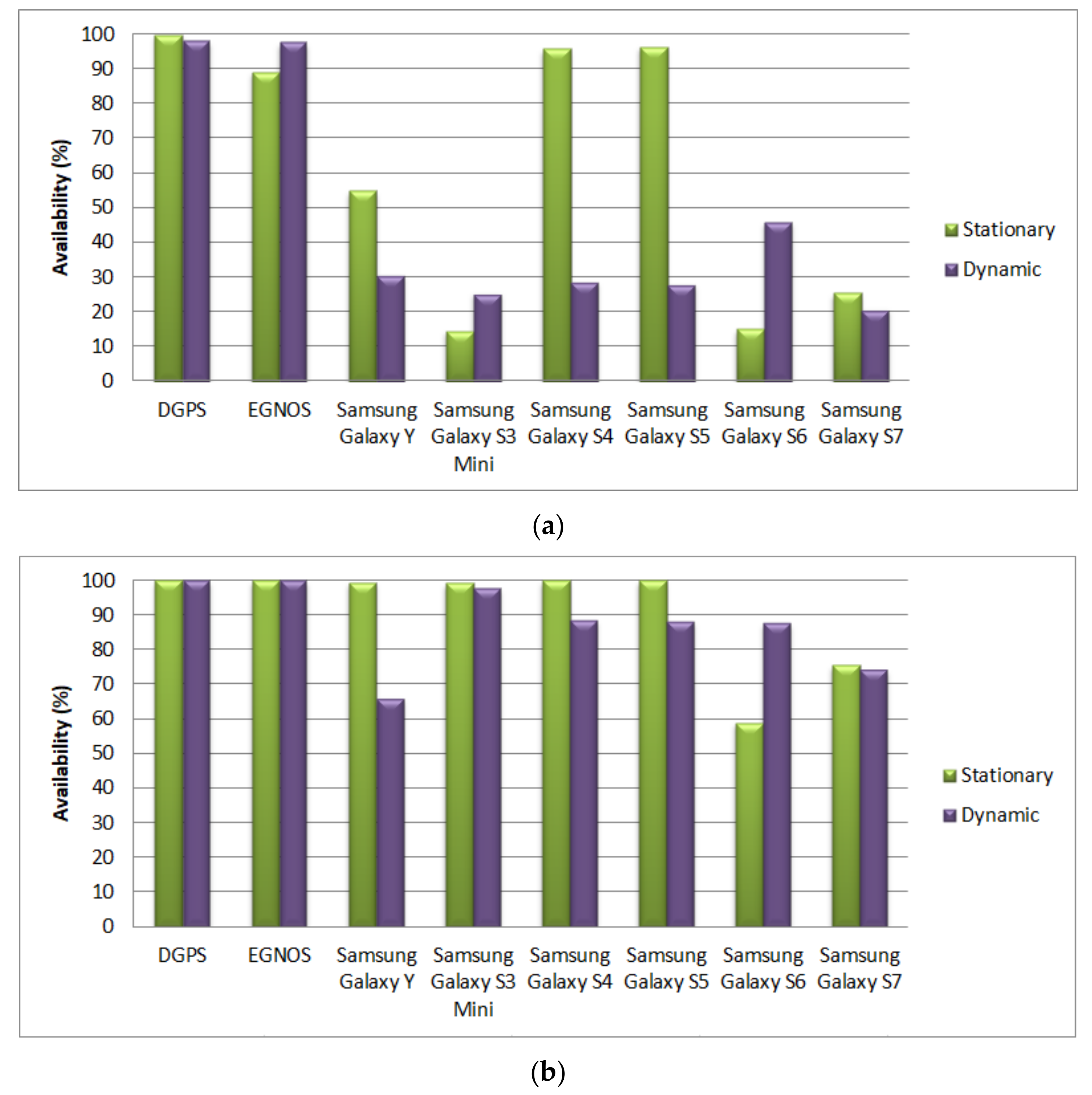
| 2014 (S)/2017 (D) | DGPS | 99.76 | 98.09 | 100 | 100 | 100 | 100 |
| 2014 (S)/2017 (D) | EGNOS | 89.11 | 97.52 | 100 | 100 | 100 | 100 |
| 2017 | Samsung Galaxy Y | 54.88 | 30.73 | 99.39 | 66.02 | 100 | 100 |
| 2017 | Samsung Galaxy S3 Mini | 14.39 | 25.52 | 99.16 | 97.85 | 100 | 100 |
| 2017 | Samsung Galaxy S4 | 95.7 | 28.67 | 99.98 | 88.68 | 100 | 100 |
| 2017 | Samsung Galaxy S5 | 96.36 | 27.92 | 100 | 88.28 | 100 | 100 |
| 2017 | Samsung Galaxy S6 | 14.99 | 45.92 | 58.82 | 87.7 | 97.54 | 99.45 |
| 2017 | Samsung Galaxy S7 | 25.35 | 20.84 | 75.38 | 74.21 | 99.76 | 98.67 |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Specht, M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors 2019, 19, 3860. https://0-doi-org.brum.beds.ac.uk/10.3390/s19183860
Specht M. Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders. Sensors. 2019; 19(18):3860. https://0-doi-org.brum.beds.ac.uk/10.3390/s19183860
Chicago/Turabian StyleSpecht, Mariusz. 2019. "Method of Evaluating the Positioning System Capability for Complying with the Minimum Accuracy Requirements for the International Hydrographic Organization Orders" Sensors 19, no. 18: 3860. https://0-doi-org.brum.beds.ac.uk/10.3390/s19183860