A System-Level Self-Calibration Method for Installation Errors in A Dual-Axis Rotational Inertial Navigation System

Abstract
:1. Introduction
2. Analysis of the IMU Error Model
2.1. Coordinate System and Transformation
2.1.1. IMU Frame
2.1.2. Rotational Mechanism Frame
2.1.3. Body Frame
2.1.4. Navigation Frame
2.2. Error Modeling of Inertial Sensors
3. A Self-Calibration Method Based on the Kalman Filter
3.1. Design of the Kalman Filter
3.2. Rotation Scheme Design and Observability Analysis
3.2.1. The Installation Errors’ Excitation of the First Period
3.2.2. The Installation Errors’ Excitation of the Second Period
4. Simulation and Experiment
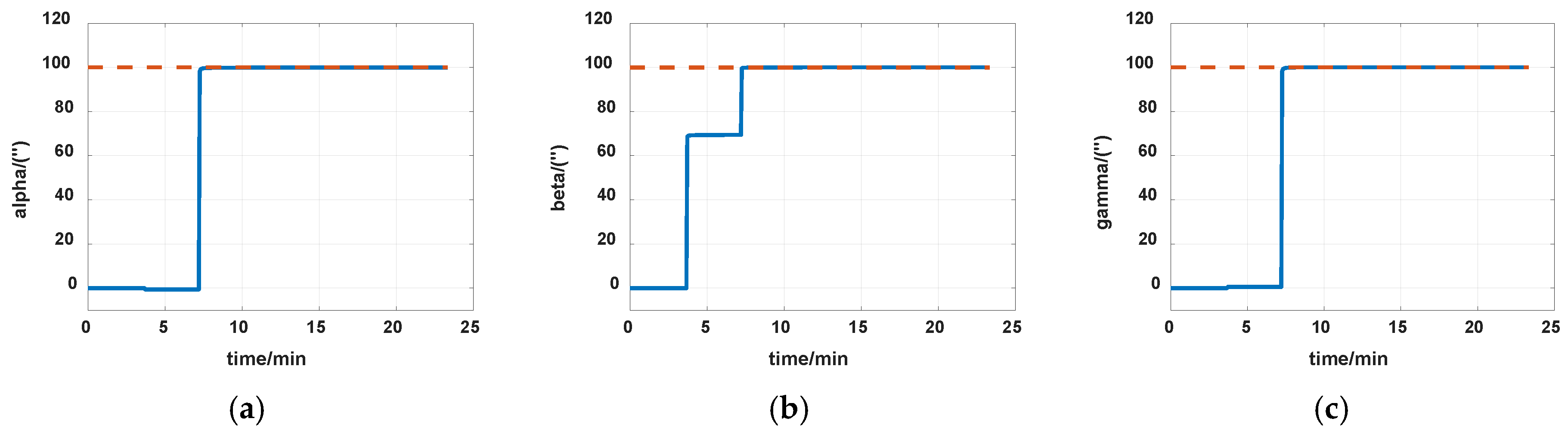
4.1. Simulation and Analysis
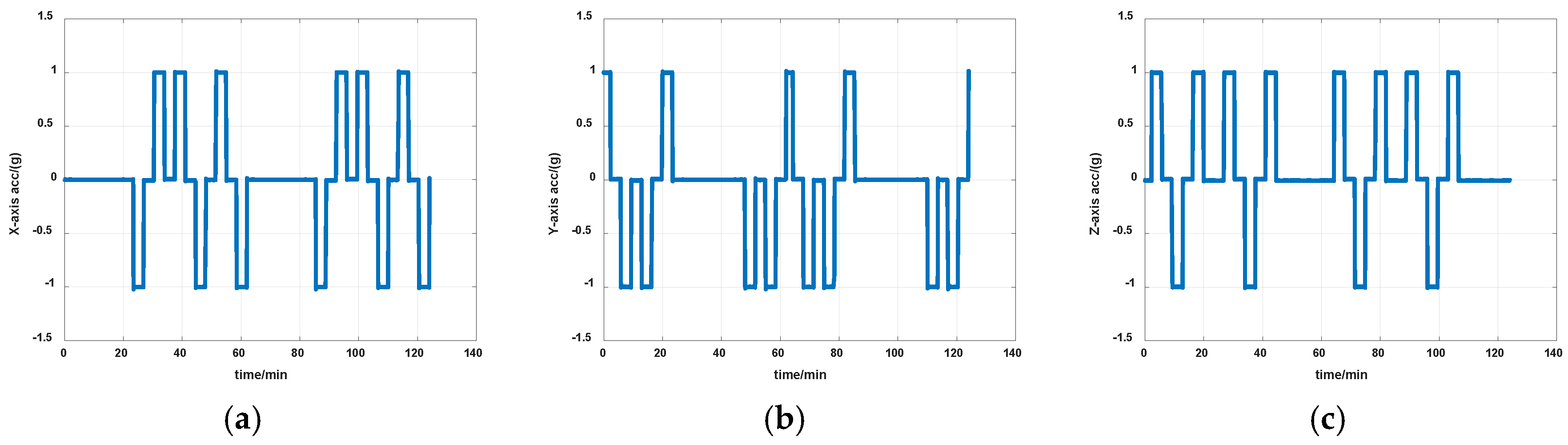
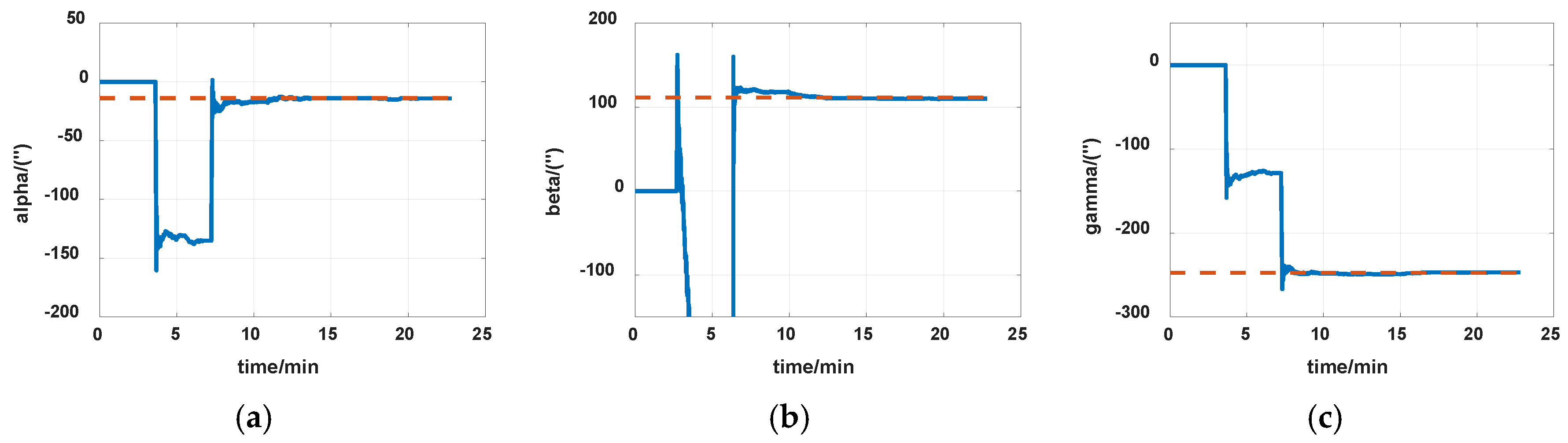
4.2. Experiment
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, B.; Liao, D.; Han, S. Error Compensation of an Optical Gyro INS by Multi-Axis Rotation. Meas. Sci. Technol. 2012, 23, 025102. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, L.; Liu, Z.; Feng, P. An Accurate Calibration Method Based on Velocity in a Rotational Inertial Navigation System. Sensors 2015, 15, 18443–18458. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ishibashi, S.; Tsukioka, S.; Yoshida, H.; Hyakudome, T.; Sawa, T.; Tahara, J.; Aoki, T.; Ishikawa, A. Accuracy Improvement of an Inertial Navigation System Brought About by the Rotational Motion. In Proceedings of the OCEANS, Aberdeen, UK, 18–21 June 2007. [Google Scholar]
- Gao, J.; Li, K.; Chen, Y. Study on Integration of Fog Single-Axis Rotational INS and Odometer for Land Vehicle. IEEE Sens. J. 2017, 18, 752–763. [Google Scholar] [CrossRef]
- Yin, H.; Yang, G.; Song, N.; Jiang, R.; Wang, Y. Error Modulation Scheme Analyzing for Dual-Axis Rotating Fiber-Optic Gyro Inertial Navigation System. Sens. Lett. 2012, 10, 1359–1363. [Google Scholar] [CrossRef]
- Ben, Y.; Chai, Y.; Gao, W.; Sun, F. Analysis of Error for a Rotating Strap-Down Inertial Navigation System with Fibro Gyro. J. Mar. Sci. Appl. 2010, 9, 419–424. [Google Scholar] [CrossRef]
- Lv, P.; Lai, J.; Liu, J.; Nie, M. The Compensation Effects of Gyros’ Stochastic Errors in a Rotational Inertial Navigation System. J. Navig. 2014, 67, 1069–1088. [Google Scholar] [CrossRef]
- Dai, M.; Lu, J. A Full-Parameter Self-Calibration Method Based on Inertial Frame Filtering for Triaxis RINS Under Swaying Base. IEEE Sens. J. 2019, 19, 2170–2180. [Google Scholar] [CrossRef]
- Wang, L.; Wang, Y.; Zhang, Q.; Gao, P. Self-Calibration Method Based on Navigation in High-Precision Inertial Navigation System with Fiber Optic Gyro. Opt. Eng. 2014, 53, 064103. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Wang, L.; Liu, J. A Self-Calibration Method for Accelerometer Nonlinearity Errors in Triaxis Rotational Inertial Navigation System. IEEE Trans. Instrum. Meas. Sci. Technol. 2017, 66, 243–253. [Google Scholar]
- Wang, B.; Ren, Q.; Deng, Z.; Fu, M. A Self-Calibration Method for Nonorthogonal Angles between Gimbals of Rotational Inertial Navigation System. IEEE Trans. Ind. Electron. 2015, 62, 2353–2362. [Google Scholar] [CrossRef]
- Ren, Q.; Wang, B.; Deng, Z.; Fu, M. A Multi-Position Self-Calibration Method for Dual-Axis Rotational Inertial Navigation System. Sens. Actuators A Phys. 2014, 219, 24–31. [Google Scholar] [CrossRef]
- Song, N.; Cai, Q.; Yang, G.; Yang, G. Analysis and Calibration of the Mounting Errors between Inertial Measurement Unit and Turntable in Dual-Axis Rotational Inertial Navigation System. Meas. Sci. Technol. 2013, 24, 115002. [Google Scholar] [CrossRef]
- Kang, L.; Ye, L.; Song, K.; Zhou, Y. Attitude Heading Reference System Using Mems Inertial Sensors with Dual-Axis Rotation. Sensors 2014, 14, 18075–18095. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Xu, P.; Chen, B.; Wu, Q. A Self-Calibration Method for the Installation Errors of Rotation Axes Based on the Asynchronous Rotation of Rotational Inertial Navigation Systems. IEEE Trans. Ind. Electron. 2018, 65, 3550–3558. [Google Scholar] [CrossRef]
- Gao, P.; Li, K.; Wang, L.; Liu, Z. A Self-Calibration Method for Tri-Axis Rotational Inertial Navigation System. Meas. Sci. Technol. 2016, 27, 115009. [Google Scholar] [CrossRef]
- Cao, Y.; Cai, H.; Zhang, S.; Li, A. A New Continuous Self-Calibration Scheme for a Gimbaled Inertial Measurement Unit. Meas. Sci. Technol. 2011, 23, 015103. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Real Values (’’) | Estimation Errors (’’) |
|---|---|---|
| 16 | 0.389 | |
| 16 | 0.575 | |
| 16 | 0.474 | |
| 16 | 0.488 | |
| 16 | 0.544 | |
| 16 | 0.406 | |
| 10 | 0.255 | |
| 10 | 0.164 | |
| 10 | 0.119 | |
| 100 | 0.145 | |
| 100 | 0.042 | |
| 100 | 0.067 |
| Characteristics | Description |
|---|---|
| Sampling frequency | 200 Hz |
| Gyro bias stability | 0.005 |
| Accelerometers bias stability | 30 |
| Rotation angle accuracy | 0.5 |
| Rotation velocity accuracy | 0.7 |
| Parameters | Real Values (’’) | Estimation Errors (’’) |
|---|---|---|
| −233.615 | 0.540 | |
| −195.180 | 1.054 | |
| −79.467 | 0.573 | |
| 39.603 | 0.698 | |
| −421.075 | 2.294 | |
| −84.660 | 0.559 | |
| 31.373 | 0.538 | |
| −36.911 | 1.610 | |
| −31.490 | 1.884 | |
| −13.828 | 0.299 | |
| 111.383 | 1.422 | |
| −247.518 | 1.502 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, S.; Lai, J.; Lyu, P.; Xu, X.; Liu, M.; Huang, K. A System-Level Self-Calibration Method for Installation Errors in A Dual-Axis Rotational Inertial Navigation System. Sensors 2019, 19, 4005. https://0-doi-org.brum.beds.ac.uk/10.3390/s19184005
Bai S, Lai J, Lyu P, Xu X, Liu M, Huang K. A System-Level Self-Calibration Method for Installation Errors in A Dual-Axis Rotational Inertial Navigation System. Sensors. 2019; 19(18):4005. https://0-doi-org.brum.beds.ac.uk/10.3390/s19184005
Chicago/Turabian StyleBai, Shiyu, Jizhou Lai, Pin Lyu, Xiaowei Xu, Ming Liu, and Kai Huang. 2019. "A System-Level Self-Calibration Method for Installation Errors in A Dual-Axis Rotational Inertial Navigation System" Sensors 19, no. 18: 4005. https://0-doi-org.brum.beds.ac.uk/10.3390/s19184005