Development and Experimental Analysis of a Seeding Quantity Sensor for the Precision Seeding of Small Seeds



Abstract
:1. Introduction
2. Design of a Seeding Quantity Sensor
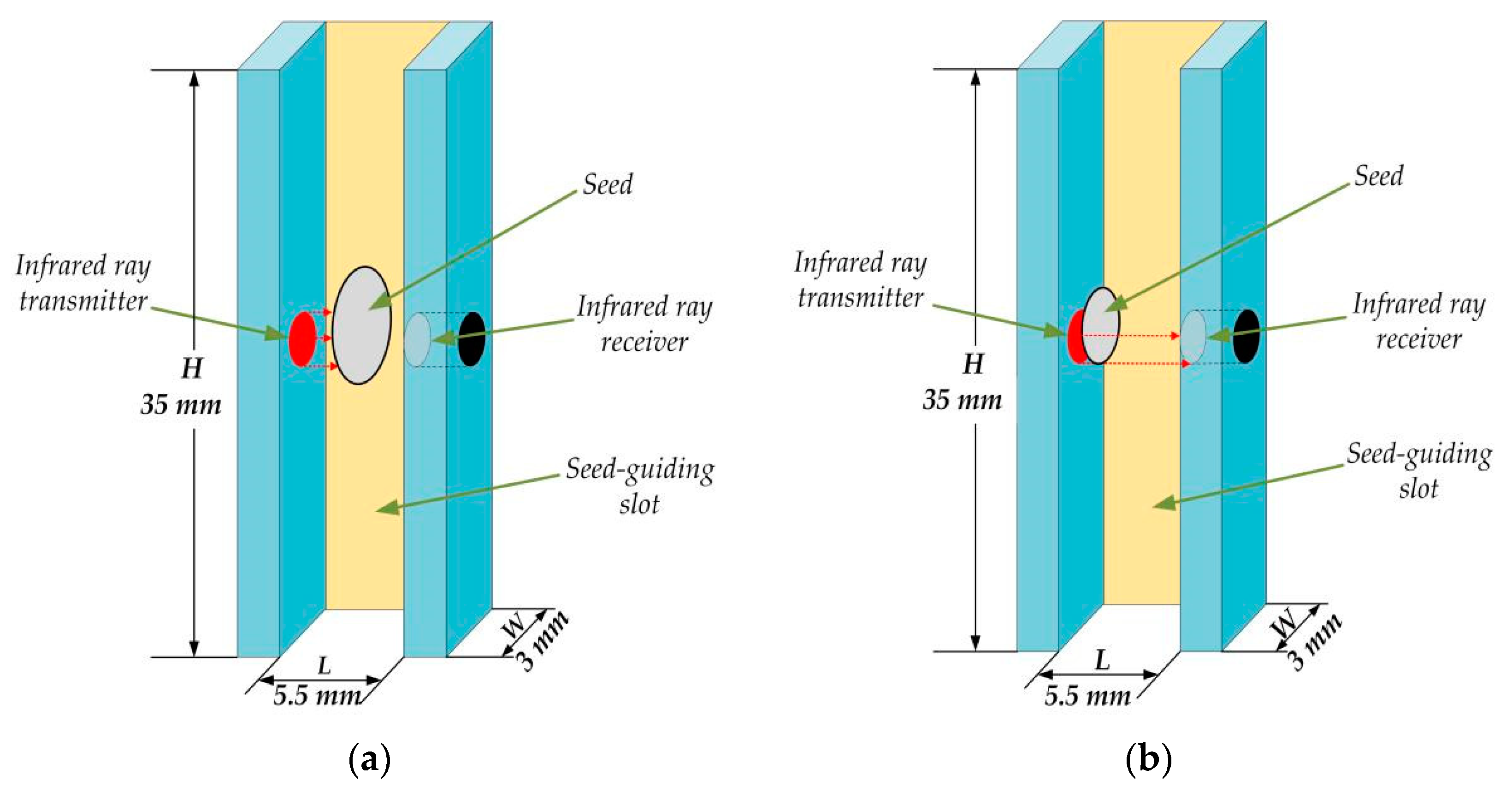
2.1. Working Principle of the Seeding Quantity Sensor
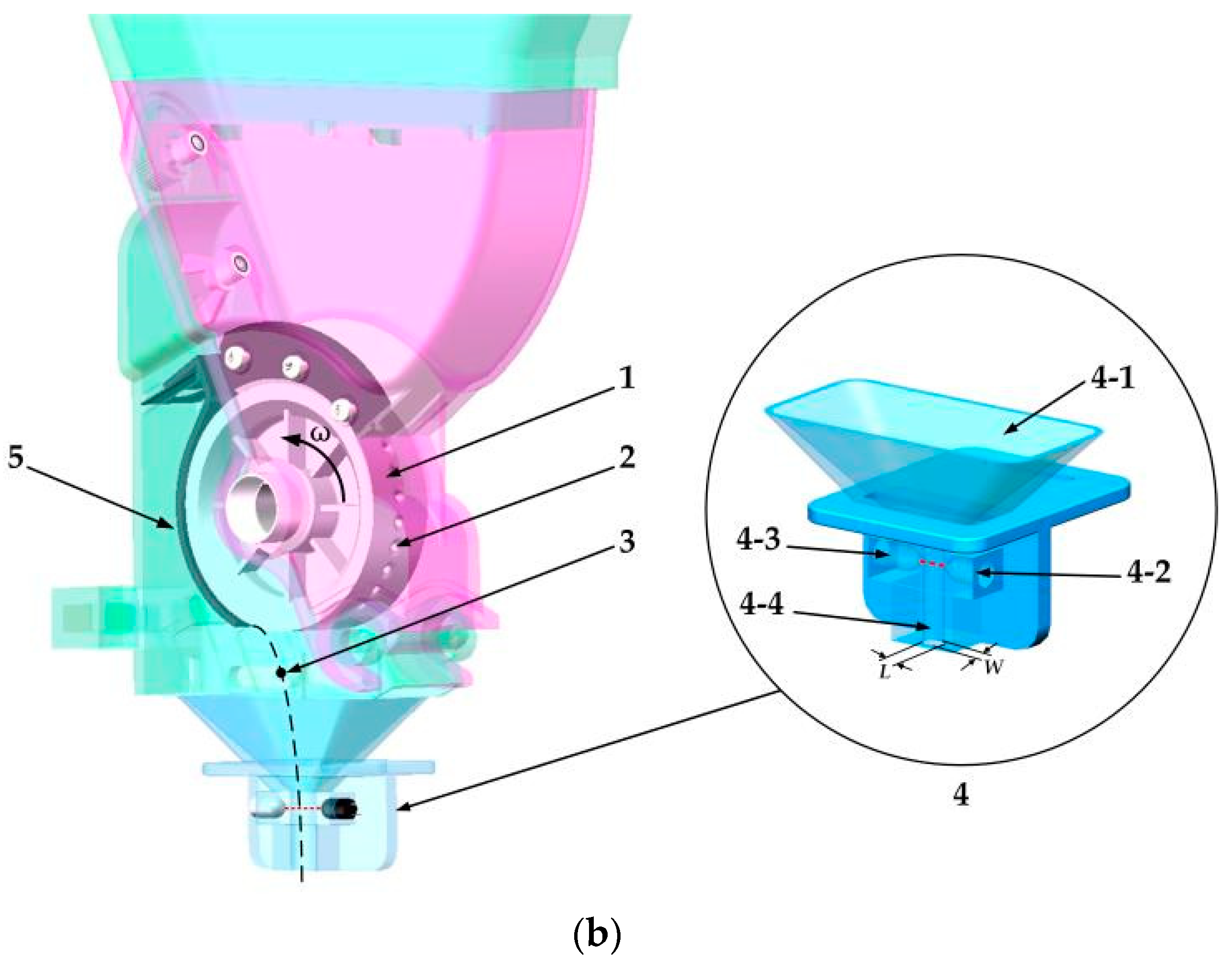
2.2. Design of the Falling Seed Trajectory Controlling (FSTC) Device
2.3. Signal Processing Circuit
3. Materials and Methods
3.1. Seed-Counting Algorithm (SCA)
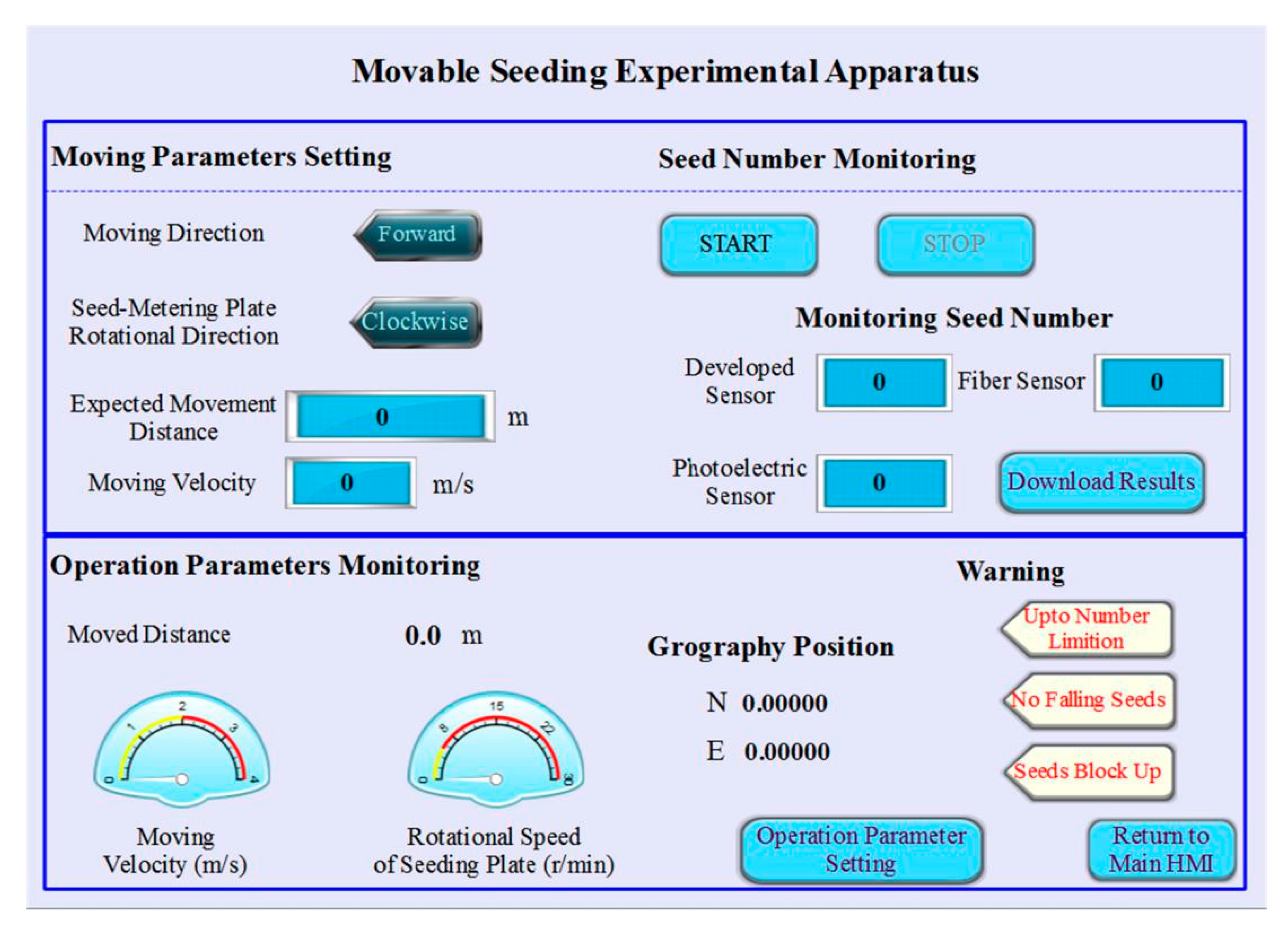
3.2. Experimental Apparatus
3.3. Experimental Analysis
3.3.1. Determining the Time Thresholds of a Common Seed
3.3.2. Optimization Experiment for the Structure of the FSTC Device
3.3.3. Accuracy Comparison Experiment
3.4. Statistical Calculation Methodology
4. Results and Discussion
4.1. Result Analyses of the Seed-Shading Time Thresholds Determination Experiment
4.2. Results of the Structure Optimization Experiment for the FSTC Device
4.3. Accuracy Comparison between the Three Sensors
- The light beam of the PRM51-N1 could not cover the whole seed-falling area. That is, not all falling seeds could interrupt the light beam steadily. Hence, some seeds may have missed being monitored during the seeding process.
- The light beam emitted by the photoelectric transmitter was wider than the diameters of some seeds such that the seeds could not shade enough light to trigger the PRM51-N1 to produce a low-level impulse signal.
- As seen in Figure 12, with the same rotational speed, the monitoring accuracies tested by the developed sensor gradually dropped off as the forward velocity rose, but the trend was not strongly apparent. It indicated that the forward speed might slightly affect the monitoring accuracy of the developed sensor.
- A part of monitoring errors may have been caused by the rough floor. The vibrations caused by the bumpy landform may have let falling seeds repeatedly bounce in the seed-guiding slot (Figure 11), thereby prolonging the seed-shading time and reducing the monitoring accuracy.
- The seed’s falling posture may have also affected the seed shading time and led to a miscounting of the seed number, which has been illustrated in Section 4.1.
- Owing to the vibrations of the experimental apparatus, the fiber transmitter and the fiber receiver may not have totally aligned, which resulted in the light intensity value being less than the set threshold (95). Sometimes, the monitoring value of the fiber sensor would still increase one or two when the experimental apparatus stopped because the experimental apparatus would vibrate back and forth several times after rapidly braking.
- As the time of use increased, the temperature of the fiber sensor would rise, which led to the default light intensity value rising with it. Thus, with a long usage time, the sensitivity of the fiber sensor would reduce gradually because it was difficult for falling seeds to shade enough light area to make the light intensity value be less than the threshold. That is why the monitoring accuracy of the fiber sensor in the last two experiments (V2R1 and V2R2, the performing sequence of experiments are shown in Figure 12) were relatively low. In contrast, the developed sensor was stable and robust, no matter how long it was used, because it was not sensitive to the temperature of inner resistances. We can conclude that the monitoring performance of the developed sensor was steady because all of its monitoring accuracies were higher than 91%.
- In terms of the fiber sensor, the volumes of the seeds used in the calibration played a pivotal role in its monitoring performance. If a falling seed was smaller than the smallest seed used in the calibration, it could not trigger the fiber sensor to generate a low-level impulse; therefore, it could not be monitored. However, the developed sensor did not need to be calibrated because the SCA algorithm could judge seeds automatically. Hence, the developed sensor could not only save the time otherwise used for calibrations, but could also monitor falling seeds without calibration errors.
4.4. Statistical Analysis
5. Conclusions
- According to the results of the structure optimization experiment, the optimal structure parameters of the FSTC device were obtained. In detail, the length of the seed-guiding slot, the width of the seed-guiding slot, and the inclination angle of the inlet were 5.5 mm, 3.00 mm, and 30°, respectively. The developed seeding quantity sensor with the optimized structure was validated three times, and the average accuracy was 98.90%.
- By comparing the average accuracies obtained by the three sensors for each experiment, the monitoring accuracies of the developed sensor were at least as high as those detected by the other two sensors. Furthermore, if all monitoring accuracies obtained by the same sensor were viewed as a whole data set, the average monitoring accuracy of the developed sensor, photoelectric sensor, and fiber sensor were 97.09%, 56.79%, and 91.10%, respectively. Thus, it is wise to select the developed sensor to monitor the quantities of discharged small seeds for practical seeding processing.
- According to the factorial analyses, the two factors, namely the forward velocity and the rotational speed of the seeding plate, did not have a significant impact on the monitoring accuracies obtained by the developed seeding quantity sensor. The results demonstrated that the developed seeding quantity sensor is statistically steady and robust under experimental conditions.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anil, C.; Habib, K.; Balal, K.; Sahin, M.; Myagmarsuren, K. Development of an opto-electronic measurement system for planter laboratory tests. Measurement 2017, 102, 90–95. [Google Scholar]
- Karayel, D.; Wiesehoff, M.; Özmerzi, A.; Müller, J. Laboratory measurement of seed drill seed spacing and velocity of fall of seeds using high-speed camera system. Comput. Electron. Agric. 2006, 50, 89–96. [Google Scholar] [CrossRef]
- He, X.; Cui, T.; Zhang, D.; Wei, J.; Wang, M.; Yu, Y.; Liu, Q.; Yan, B.; Zhao, D.; Yang, L. Development of an electric-driven control system for a precision planter based on a closed-loop PID algorithm. Comput. Electron. Agric. 2017, 136, 184–192. [Google Scholar] [CrossRef]
- Youchun, D.; Junqiang, Y.; Kai, Z.; Lili, Z.; Yawen, Z.; Qingxi, L. Design and experiemnt on seed flow sensing device for rapeseed precision metering device. Trans. Chin. Soc. Agric. Eng. 2017, 9, 37–44. [Google Scholar]
- Dongyan, H.; Honglei, J.; Yue, Q.; Longtu, Z.; Honggang, L. Seeding monitor system for planter based on polyvinylidence fluroride piezoelectric film. Trans. Chin. Soc. Agric. Eng. 2013, 23, 15–22. [Google Scholar]
- Youchun, D.; Lili, Z.; Junqiang, Y.; Kai, Z. Sensing device improvement and communication design on sowing monitoring system of precision planter for rapeseed. Trans. Chin. Soc. Agric. Eng. 2018, 14, 19–26. [Google Scholar]
- Liming, Z.; Xiaochao, Z.; Yanwei, Y. Design of capacitance seed rate sensor of wheat planter. Trans. Chin. Soc. Agric. Eng. 2010, 10, 99–103. [Google Scholar]
- Yujing, S.; Honglei, J.; Deliang, R.; Jingjing, Y.; Yang, L. Experimental study of capacitance sensors to test seed-flow. Appl. Mech. Mater. 2013, 347, 167–170. [Google Scholar]
- Liming, Z.; Shumao, W.; Xiaochao, Z.; Yanwei, Y.; Junning, Z. Seed monitoring system for corn planter based on capacitance signal. Trans. Chin. Soc. Agric. Eng. 2012, 28, 16–21. [Google Scholar]
- Jakub, L.; Václav, K.; Václav, P.; František, K. Capacitive throughput sensor for plant materials-effects of frequency and moisture content. Comput. Electron. Agric. 2017, 133, 22–29. [Google Scholar]
- WaveVision Sensors. Available online: https://www.lincoprecision.com/precision-farming/precisioplanting/wavevision-sensors/ (accessed on 17 November 2019).
- Haotun, L.; Jieyu, R.; Xin, L.; Shixiong, L.; Gang, W.; Yongjun, Z. Review of the monitoring systems of the machine for precision sowing and fertilization of wheat. In Proceedings of the ASABE 2018 Annual International Meeting, Austin, TX, USA, 29 July–1 August 2018; p. 1800736. [Google Scholar]
- Marko, K.; Dusan, R.; Dragi, R.; Lazar, S.; Nebojsa, D.; Vladimir, C.; Natasa, L. Corn seeding process fault cause analysis based on a theoretical and experimental approach. Comput. Electron. Agric. 2018, 151, 207–218. [Google Scholar]
- Michael, F.K.; Yubin, L.; Changhe, C.; John, A.S. Opto-electronic Sensor system for laboratory measurement of planter seed spacing with small seeds. J. Agric. Eng. Res. 1999, 72, 119–127. [Google Scholar]
- Deividson, L.O.; Rosane, F. Usage of the DFRobot RB-DFR-49 Infrared sensor to detect maize seed passage on a conveyor belt. Comput. Electron. Agric. 2014, 102, 106–111. [Google Scholar]
- Seeds Sensors. Available online: https://www.mcelettronica.it/it/prodotti/semina/semina-di-precisione/fotocellule_227c28. html (accessed on 17 November 2019).
- Xiangze, H.; Xupeng, H.; Yi, Z.; Xun, L.; Ruiyin, H. Research on the sowing performance monitoring system for precision seeders based on photoelectric sensor. J. South China Agric. Univ. 2017, 1, 120–124. [Google Scholar]
- Yu, C.; Liguo, W.; Xingtao, L.; Zhuoli, L.; Fengzhu, W. Design and experiment of seeding quality infrared monitoring system for no-tillage seeder. Trans. Chin. Soc. Agric. Eng. 2017, 33, 11–16. [Google Scholar]
- Michael, F.K.; Yubin, L.; Changhe, C.; John, A.S. Opto-electronic sensor system for rapid evaluation of planter seed spacing uniformity. Trans. ASAE 1998, 41, 237–245. [Google Scholar]
- Hajahmed, O.; Tola, E.; Kheiralla, A.F.; Algaadi, K. On-the-go assessment of seed metering unit performance using an opto-electrionic sensor. In Proceedings of the Annual Conference of Postgraduate Studies and Scientific Research, Khartoum, Sudan, 17–20 February 2012. [Google Scholar]
- Xiangxing, Z.; Jianjun, Z.; Shouyong, X.; Hui, L. Seeder detection system of rapeseed based on infrared emitting diode. J. Agric. Mech. Res. 2012, 4, 156–159. [Google Scholar]
- Al-Mallahi, A.; Kataoka, T. Application of fibre sensor in grain drill to estimate seed flow under field operational conditions. Comput. Electron. Agric. 2016, 121, 412–419. [Google Scholar] [CrossRef]
- Al-Mallahi, A.; Kataoka, T. Estimation of mass flow of seeds using fibre sensor and multiple linear regression modelling. Comput. Electron. Agric. 2013, 99, 116–122. [Google Scholar] [CrossRef]
- Zhixing, S.; Huanwen, G. RLD Optoelectronic Sensor for Seeding Monitoring. Trans. Chin. Soc. Agric. Mach. 2002, 33, 41–43. [Google Scholar]
- Karimi, H.; Navid, H.; Besharati, B. A practical approach to comparative design of non-contact sensing techniques for seed flow rate detection. Comput. Electron. Agric. 2017, 142, 165–172. [Google Scholar] [CrossRef]
- Karimi, H.; Navid, H.; Besharati, B.; Eskandari, I. Accessing an infrared-based seed drill monitoring system under field operating condition. Comput. Electron. Agric. 2019, 162, 543–551. [Google Scholar] [CrossRef]
- Besharati, B.; Navid, H.; Karimi, H.; Behfr, H.; Eskandari, I. Development of an infrared seed-sensing system to estimate flow rates based on physical properties of seeds. Comput. Electron. Agric. 2019, 162, 874–881. [Google Scholar] [CrossRef]
- Wei, L.; Jianping, H.; Xingsheng, Z.; Haoran, P.; Imran, A.L.; Wei, W. Development and experimental analysis of an intelligent sensor for monitoring seed flow rate based on a seed flow reconstruction technique. Comput. Electron. Agric. 2019, 164, 1–13. [Google Scholar]
- Peng, S.; Junxiong, Z.; Wei, L.; Xiaochao, Z.; Xianfa, F. Real-time Monitoring system for accuracy of precision seeder. Trans. Chin. Soc. Agric. Mach. 2011, 42, 71–74. [Google Scholar]
- Chao, J.; Xuegeng, C.; Jincheng, C.; Shiguo, W.; Pengliang, H. Monitoring system for working performance of no-tillage corn precision seeder. Trans. Chin. Soc. Agric. Mach. 2016, 47, 1–6. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Minimum | Low | Mean | High | Maximum |
|---|---|---|---|---|---|
| Slot length L (mm) | 2.14 | 3 | 4.25 | 5.5 | 6.35 |
| Slot width W (mm) | 2.32 | 2.5 | 2.75 | 3 | 3.17 |
| Inlet angle α (°) | 19.77 | 30 | 45 | 60 | 70.22 |
| Factor | Level 1 | Level 2 | Level 3 |
|---|---|---|---|
| Forward Velocity (m∙s−1) | 0.5 | 1.0 | 1.5 |
| Rotational speed (rev∙min−1) | 5 | 12.5 | 20 |
| Slot Length L (mm) | Slot Width W (mm) | Inlet Angle α (°) | Accuracy (%) |
|---|---|---|---|
| 3 | 2.5 | 30 | 99.98 |
| 5.5 | 2.5 | 30 | 97.47 |
| 3 | 3 | 30 | 98.57 |
| 5.5 | 3 | 30 | 100.00 |
| 3 | 2.5 | 60 | 99.11 |
| 5.5 | 2.5 | 60 | 86.94 |
| 3 | 3 | 60 | 98.47 |
| 5.5 | 3 | 60 | 91.62 |
| 2.14 | 2.75 | 45 | 98.08 |
| 6.35 | 2.75 | 45 | 96.10 |
| 4.25 | 2.32 | 45 | 99.04 |
| 4.25 | 3.17 | 45 | 87.13 |
| 4.25 | 2.75 | 19.77 | 98.06 |
| 4.25 | 2.75 | 70 | 98.53 |
| 4.25 | 2.75 | 45 | 97.22 |
| 4.25 | 2.75 | 45 | 97.30 |
| 4.25 | 2.75 | 45 | 95.12 |
| 4.25 | 2.75 | 45 | 97.06 |
| 4.25 | 2.75 | 45 | 97.22 |
| 4.25 | 2.75 | 45 | 97.44 |
| Source | Sum of Squares | Df | Mean Squared | F | Sig. |
|---|---|---|---|---|---|
| Corrected model | 0.002 | 8 | 0.000 | 1.050 | 0.438 |
| Intercept | 26.059 | 1 | 26.059 | 92,085.718 | 0.000 |
| Rotational speed | 0.001 | 2 | 0.000 | 1.555 | 0.238 |
| Velocity | 0.001 | 2 | 0.000 | 1.657 | 0.219 |
| Rotational speed × Velocity | 0.001 | 4 | 0.000 | 0.493 | 0.741 |
| Error | 0.005 | 18 | 0.000 | ||
| Total | 26.066 | 27 | |||
| Corrected total | 0.007 | 26 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Hu, J.; Zhao, X.; Pan, H.; Lakhiar, I.A.; Wang, W.; Zhao, J. Development and Experimental Analysis of a Seeding Quantity Sensor for the Precision Seeding of Small Seeds. Sensors 2019, 19, 5191. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235191
Liu W, Hu J, Zhao X, Pan H, Lakhiar IA, Wang W, Zhao J. Development and Experimental Analysis of a Seeding Quantity Sensor for the Precision Seeding of Small Seeds. Sensors. 2019; 19(23):5191. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235191
Chicago/Turabian StyleLiu, Wei, Jianping Hu, Xingsheng Zhao, Haoran Pan, Imran Ali Lakhiar, Wei Wang, and Jun Zhao. 2019. "Development and Experimental Analysis of a Seeding Quantity Sensor for the Precision Seeding of Small Seeds" Sensors 19, no. 23: 5191. https://0-doi-org.brum.beds.ac.uk/10.3390/s19235191