Deep Learning for Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application to Smart Mobility

 , , , , ,
, , , , ,
Abstract
:1. Introduction
2. Related Work
3. System Architecture: Materials and Methods
3.1. Overview
3.2. Datasets
3.3. Acquisition System
3.4. Deep Learning Libraries
4. Object Detection Based on Deep Learning
4.1. Object Detection Based SSD
4.2. Detectron Object Detection
4.3. YOLOv3 Object Detection
4.4. Object Detection Algorithm
4.4.1. Selection Criteria
4.4.2. Performance of Processing Time
4.4.3. Performance of Detection
5. Object Depth Estimation
5.1. Algorithm for Monocular Camera
5.2. Algorithm for Stereoscopic Cameras
5.3. Choice of the Method
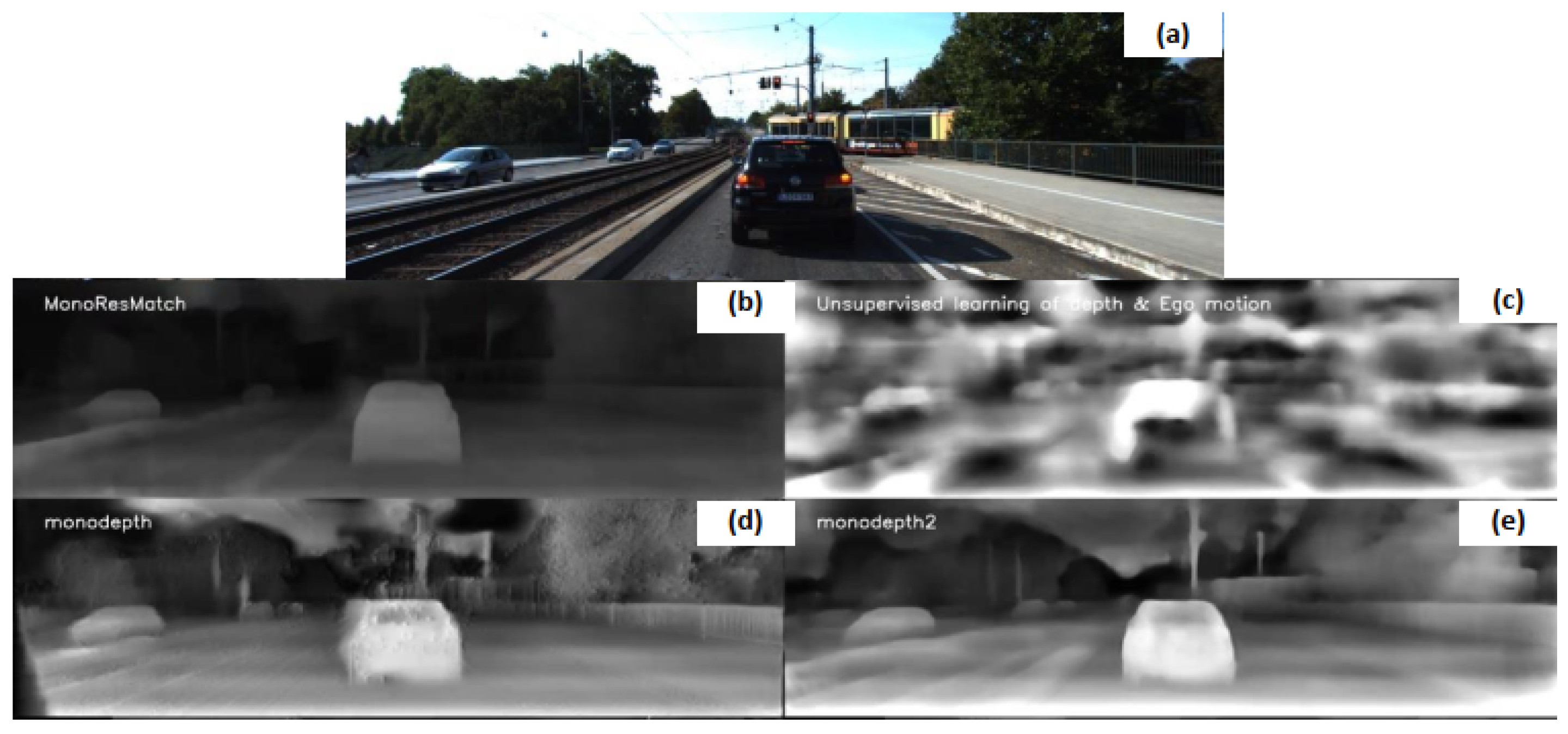
5.3.1. Monocular Approach
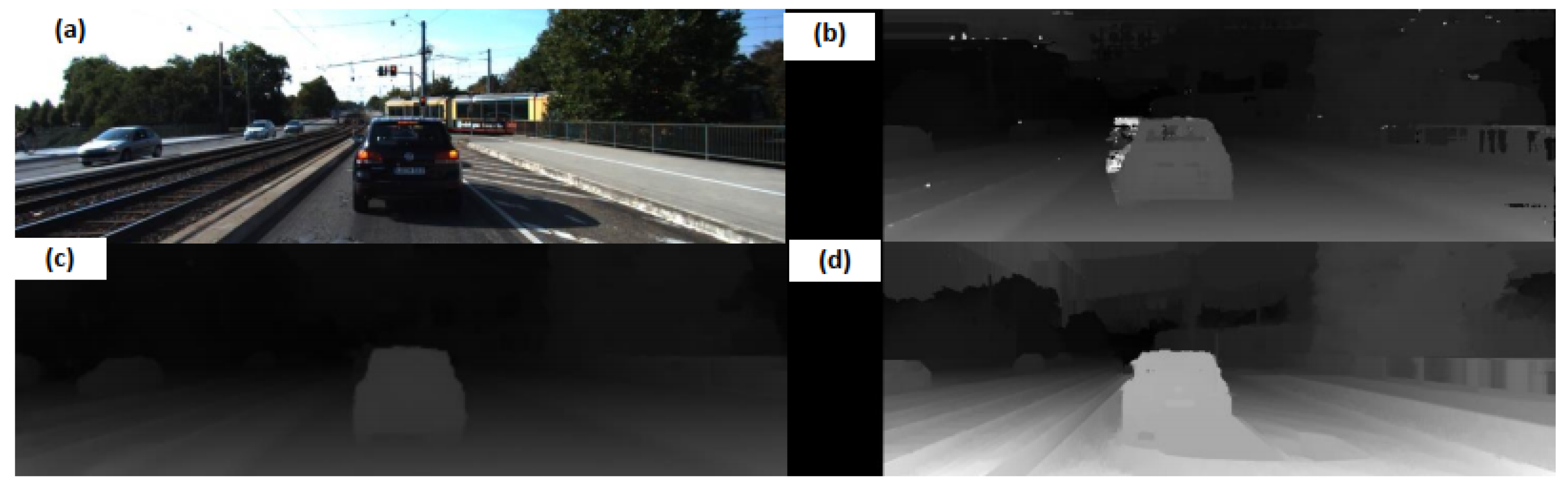
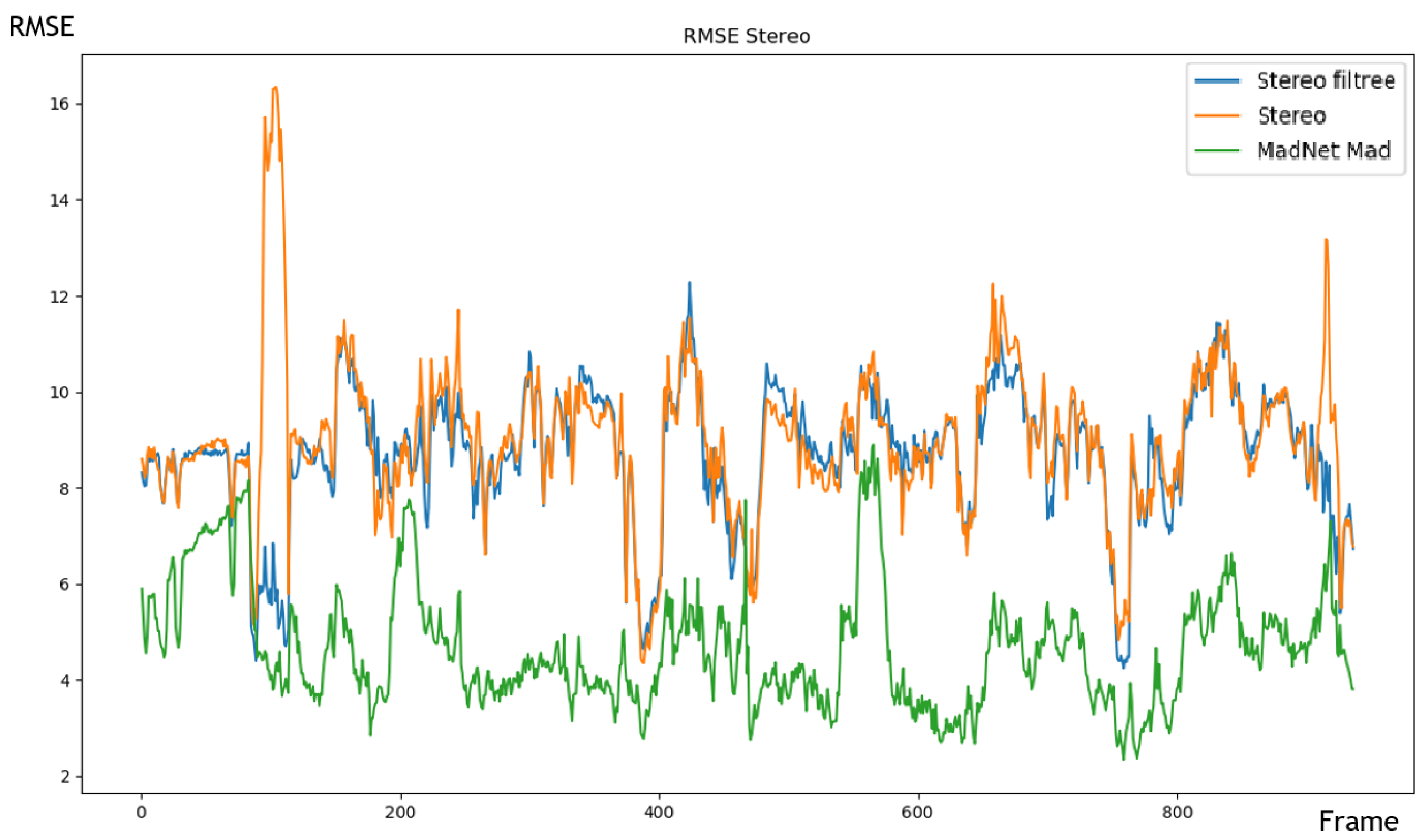
5.3.2. Stereoscopic Approach
6. Object Localisation
7. Object Tracking
7.1. 2D Tracking
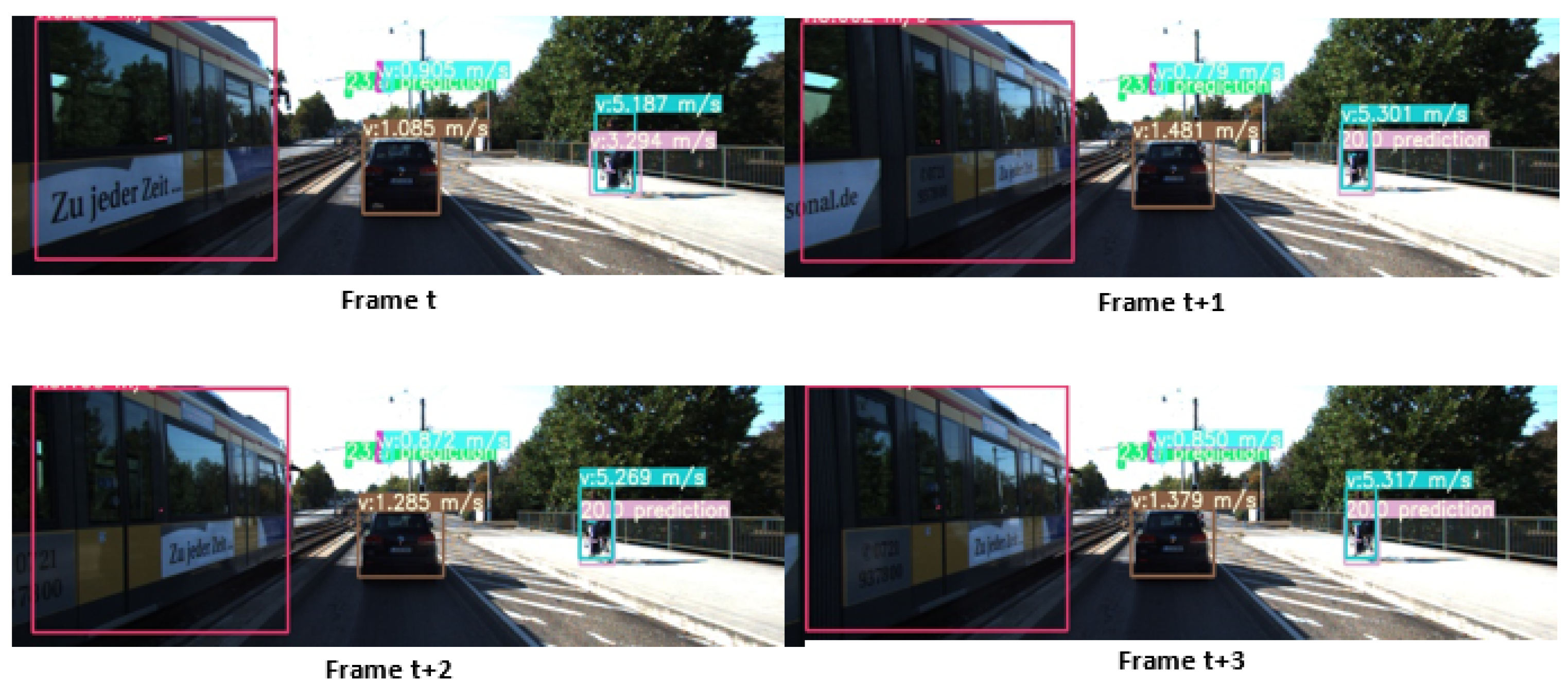
7.2. 3D Tracking
7.3. Adjusting the Parameters of the Extended Kalman Filter
7.4. Object Tracking Results
8. Conclusions and Future Directions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mukojima, H.; Deguchi, D.; Kawanishi, Y.; Ide, I.; Murase, H.; Ukai, M.; Nagamine, N.; Nakasone, R. Moving camera background-subtraction for obstacle detection on railway tracks. In Proceedings of the 2016 IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016; pp. 3967–3971. [Google Scholar]
- Yanan, S.; Hui, Z.; Li, L.; Hang, Z. Rail Surface Defect Detection Method Based on YOLOv3 Deep Learning Networks. In Proceedings of the 2018 IEEE Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 1563–1568. [Google Scholar]
- Khemmar, R.; Gouveia, M.; Decoux, B.; Ertaud, J.Y. Real Time Pedestrian and Object Detection and Tracking-based Deep Learning. Application to Drone Visual Tracking. In Proceedings of the International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision, Plzen, Czechia, 18–22 May 2019. [Google Scholar]
- Chen, Z.; Khemmar, R.; Decoux, B.; Atahouet, A.; Ertaud, J.Y. Real Time Object Detection, Tracking, and Distance and Motion Estimation based on Deep Learning: Application to Smart Mobility. In Proceedings of the 2019 Eighth International Conference on Emerging Security Technologies (EST), Colchester, UK, 22–24 July 2019; pp. 1–6. [Google Scholar]
- Yang, S.; Baum, M. Extended Kalman filter for extended object tracking. In Proceedings of the 2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), New Orleans, LA, USA, 5–9 March 2017; pp. 4386–4390. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single shot multibox detector. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 24–27 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Advances in Neural Information Processing Systems, Montreal, QC, Canada, 7–12 December 2015; pp. 91–99. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Palacín, J.; Pallejà, T.; Tresanchez, M.; Sanz, R.; Llorens, J.; Ribes-Dasi, M.; Masip, J.; Arno, J.; Escola, A.; Rosell, J.R. Real-time tree-foliage surface estimation using a ground laser scanner. IEEE Trans. Instrum. Meas. 2007, 56, 1377–1383. [Google Scholar] [CrossRef] [Green Version]
- Kang, B.; Kim, S.J.; Lee, S.; Lee, K.; Kim, J.D.; Kim, C.Y. Harmonic distortion free distance estimation in ToF camera. In Three-Dimensional Imaging, Interaction, and Measurement; International Society for Optics and Photonics: Bellingham, WA, USA, 2011; Volume 7864, p. 786403. [Google Scholar]
- Godard, C.; Mac Aodha, O.; Brostow, G.J. Unsupervised monocular depth estimation with left-right consistency. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 June 2017; pp. 270–279. [Google Scholar]
- Ciaparrone, G.; Sánchez, F.L.; Tabik, S.; Troiano, L.; Tagliaferri, R.; Herrera, F. Deep Learning in Video Multi-Object Tracking: A Survey. Neurocomputing 2019, in press. [Google Scholar] [CrossRef] [Green Version]
- Wojke, N.; Bewley, A.; Paulus, D. Simple online and realtime tracking with a deep association metric. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 3645–3649. [Google Scholar]
- Bernardin, K.; Stiefelhagen, R. Evaluating Multiple Object Tracking Performance: The CLEAR MOT Metrics. J. Image Video Process. 2008, 2008, 1. [Google Scholar] [CrossRef] [Green Version]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The KITTI dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Cordts, M.; Omran, M.; Ramos, S.; Scharwächter, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset. Available online: https://www.visinf.tu-darmstadt.de/media/visinf/vi_papers/2015/cordts-cvprws.pdf (accessed on 16 January 2020).
- Everingham, M.; Eslami, S.A.; Van Gool, L.; Williams, C.K.; Winn, J.; Zisserman, A. The pascal visual object classes challenge: A retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft coco: Common objects in context. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Kuznetsova, A.; Rom, H.; Alldrin, N.; Uijlings, J.; Krasin, I.; Pont-Tuset, J.; Kamali, S.; Popov, S.; Malloci, M.; Duerig, T.; et al. The open images dataset v4: Unified image classification, object detection, and visual relationship detection at scale. arXiv 2018, arXiv:1811.00982. [Google Scholar]
- Ragot, N.; Khemmar, R.; Pokala, A.; Rossi, R.; Ertaud, J.Y. Benchmark of Visual SLAM Algorithms: ORB-SLAM2 vs RTAB-Map. In Proceedings of the 2019 Eighth International Conference on Emerging Security Technologies (EST), Colchester, UK, 22–24 July 2019; pp. 1–6. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Redmon, J. Darknet: Open Source Neural Networks in C. Available online: http://pjreddie.com/darknet/ (accessed on 16 January 2020).
- Zhou, T.; Brown, M.; Snavely, N.; Lowe, D.G. Unsupervised learning of depth and ego-motion from video. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1851–1858. [Google Scholar]
- Tosi, F.; Aleotti, F.; Poggi, M.; Mattoccia, S. Learning monocular depth estimation infusing traditional stereo knowledge. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 9799–9809. [Google Scholar]
- Godard, C.; Mac Aodha, O.; Firman, M.; Brostow, G. Digging into self-supervised monocular depth estimation. arXiv 2018, arXiv:1806.01260. [Google Scholar]
- Min, D.; Sohn, K. Cost aggregation and occlusion handling with WLS in stereo matching. IEEE Trans. Image Process. 2008, 17, 1431–1442. [Google Scholar] [PubMed]
- Tonioni, A.; Tosi, F.; Poggi, M.; Mattoccia, S.; Stefano, L.D. Real-time self-adaptive deep stereo. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–21 June 2019; pp. 195–204. [Google Scholar]
- Kalman. A New Approach to Linear Filtering and Prediction Problems. Trans. ASME J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- Zendel, O.; Murschitz, M.; Zeilinger, M.; Steininger, D.; Abbasi, S.; Beleznai, C. RailSem19: A Dataset for Semantic Rail Scene Understanding. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Long Beach, CA, USA, 16–20 June 2019; pp. 32–40. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | mAP | FPS | Image Resolution |
|---|---|---|---|
| Faster R-CNN | 73.2 | 7 | 1000 × 600 |
| Fast YOLO | 52.7 | 155 | 448 × 448 |
| YOLO (VGG16) | 66.4 | 21 | 448 × 448 |
| SSD300 | 74.3 | 46 | 300 × 300 |
| SSD512 (ours) | 76.8 | 19 | 512 × 512 |
| Approach | mAP-50 | Run-Time (ms) |
|---|---|---|
| SSD321 | 45.4 | 61 |
| SSD513 | 50.4 | 125 |
| R-FCN | 51.9 | 85 |
| FPN FRCN | 59.1 | 172 |
| YOLOv3-320 | 51.5 | 22 |
| YOLOv3-416 | 55.3 | 29 |
| YOLOv3-608 (ours) | 57.9 | 51 |
| Approach | RMSE | FPS |
|---|---|---|
| sfmLearner | 16.530 | 20 |
| Monodepth | 6.225 | 5 |
| MonoResMatch | 5.831 | 1 |
| Monodepth2 | 5.709 | 20 |
| Approach | RMSE | FPS |
|---|---|---|
| Stereo-baseline | 9.002 | 15 |
| Stereo-WLS Filter | 8.690 | 7 |
| MADNet (ours) | 4.648 | 7 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mauri, A.; Khemmar, R.; Decoux, B.; Ragot, N.; Rossi, R.; Trabelsi, R.; Boutteau, R.; Ertaud, J.-Y.; Savatier, X. Deep Learning for Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application to Smart Mobility. Sensors 2020, 20, 532. https://0-doi-org.brum.beds.ac.uk/10.3390/s20020532
Mauri A, Khemmar R, Decoux B, Ragot N, Rossi R, Trabelsi R, Boutteau R, Ertaud J-Y, Savatier X. Deep Learning for Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application to Smart Mobility. Sensors. 2020; 20(2):532. https://0-doi-org.brum.beds.ac.uk/10.3390/s20020532
Chicago/Turabian StyleMauri, Antoine, Redouane Khemmar, Benoit Decoux, Nicolas Ragot, Romain Rossi, Rim Trabelsi, Rémi Boutteau, Jean-Yves Ertaud, and Xavier Savatier. 2020. "Deep Learning for Real-Time 3D Multi-Object Detection, Localisation, and Tracking: Application to Smart Mobility" Sensors 20, no. 2: 532. https://0-doi-org.brum.beds.ac.uk/10.3390/s20020532