Frequency Response Stabilization and Comparative Studies of MET Hydrophone at Marine Seismic Exploration Systems †


Abstract
:1. Introduction
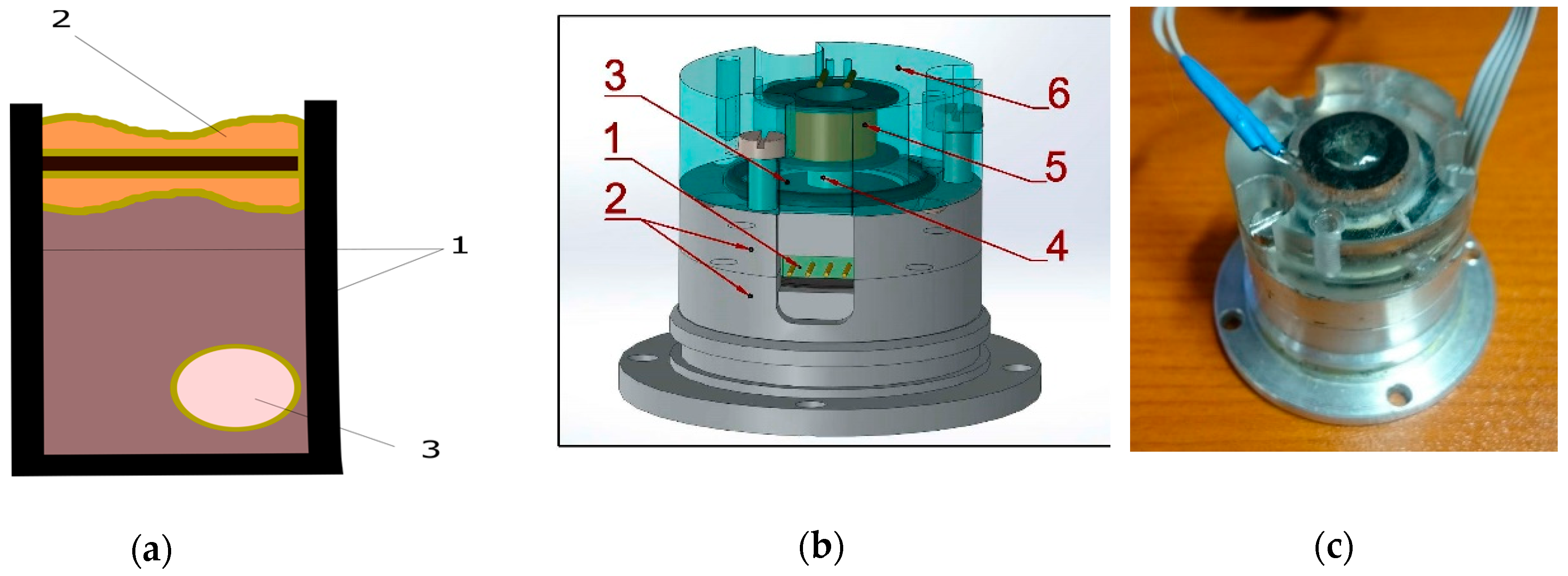
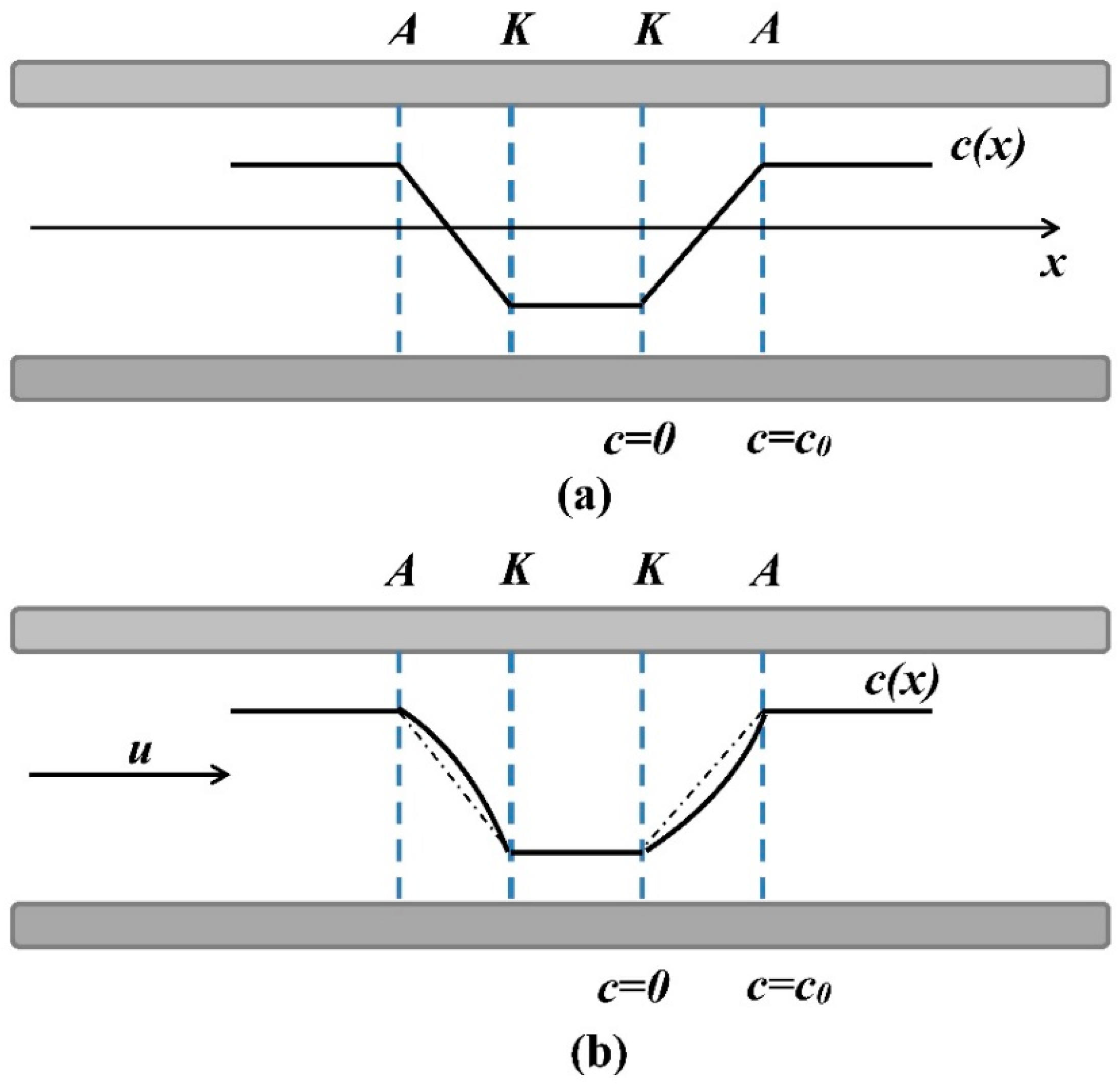
2. Stabilization Method of the Frequency Response of the Hydrophone
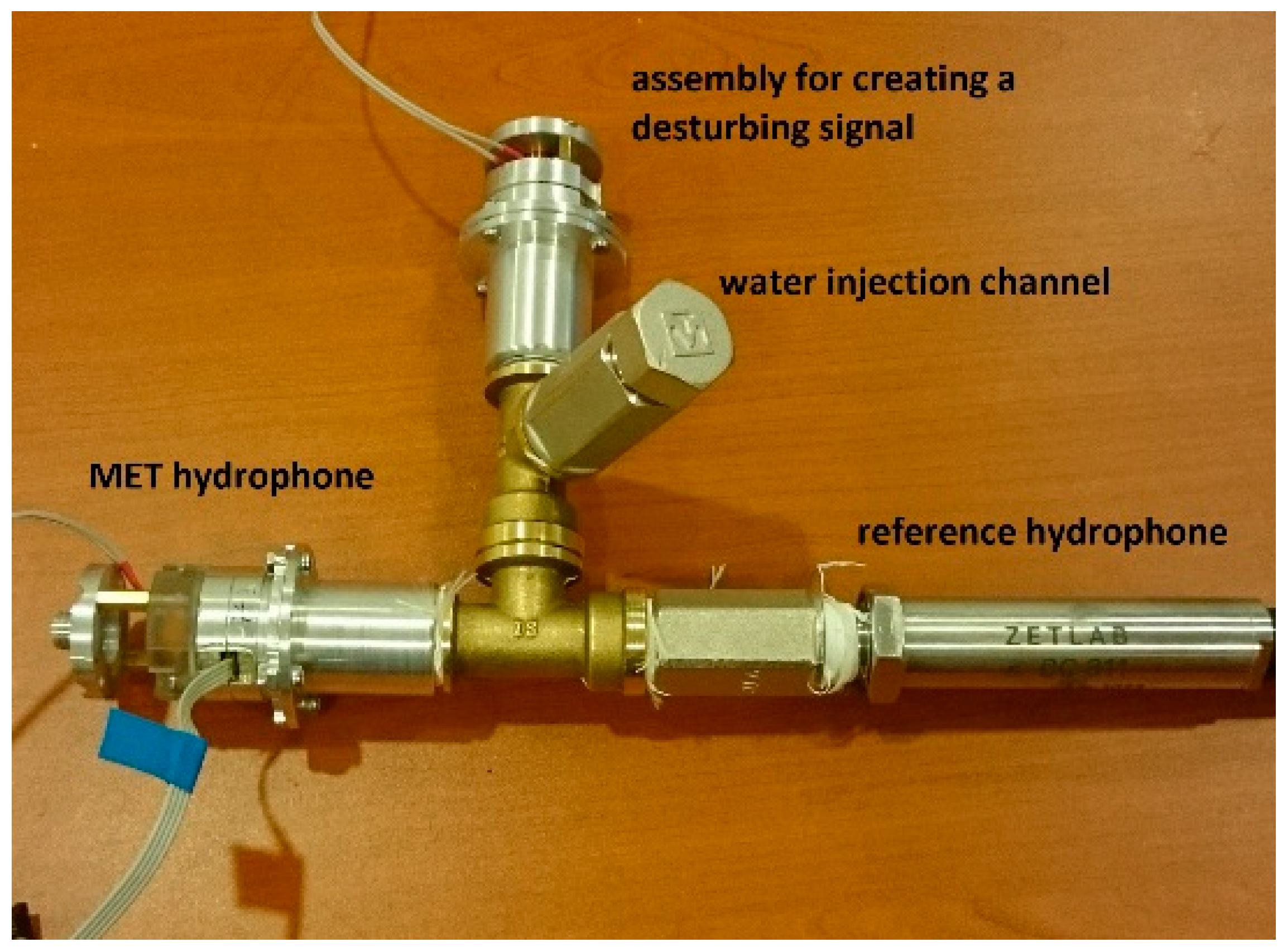
3. Laboratory Tests
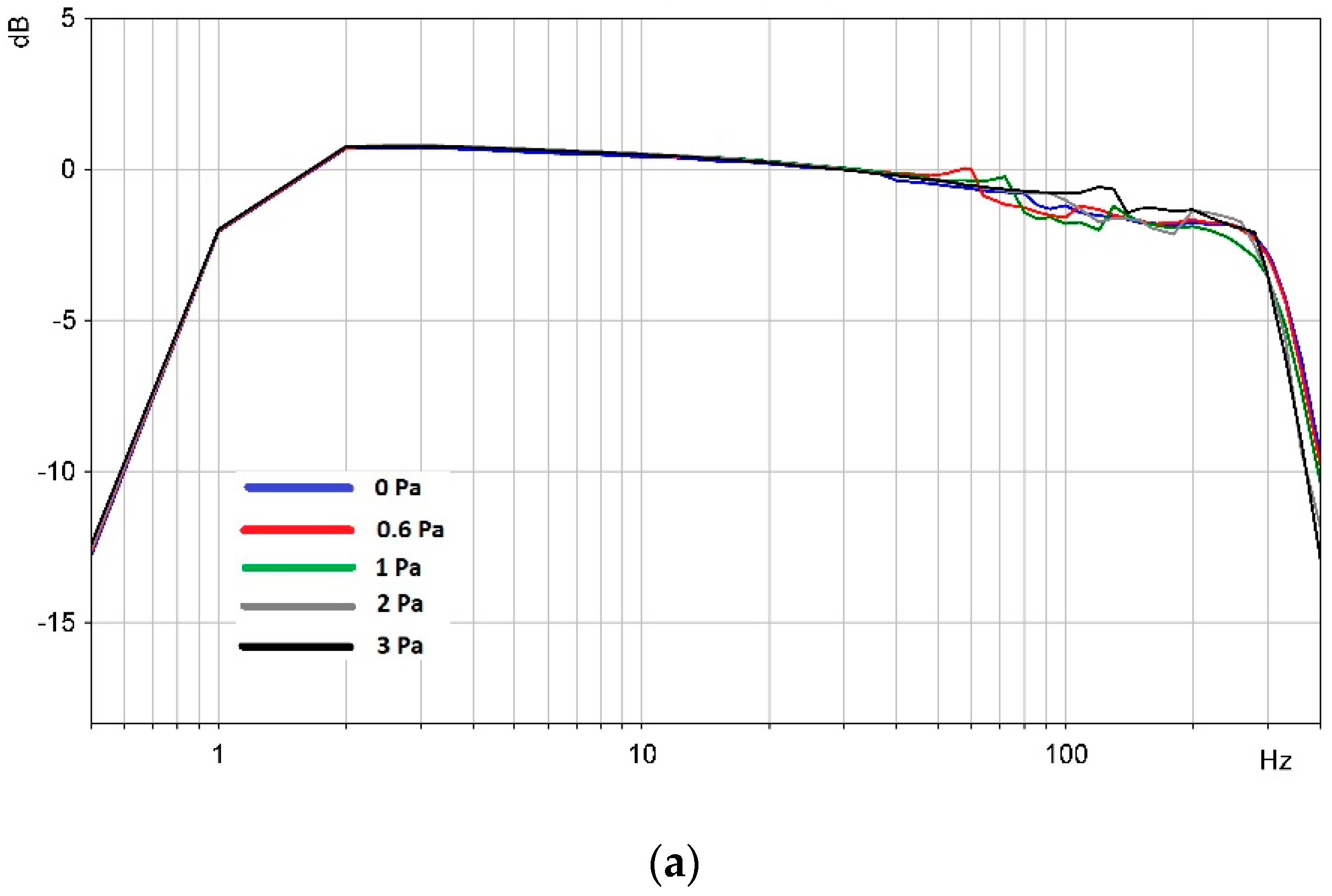
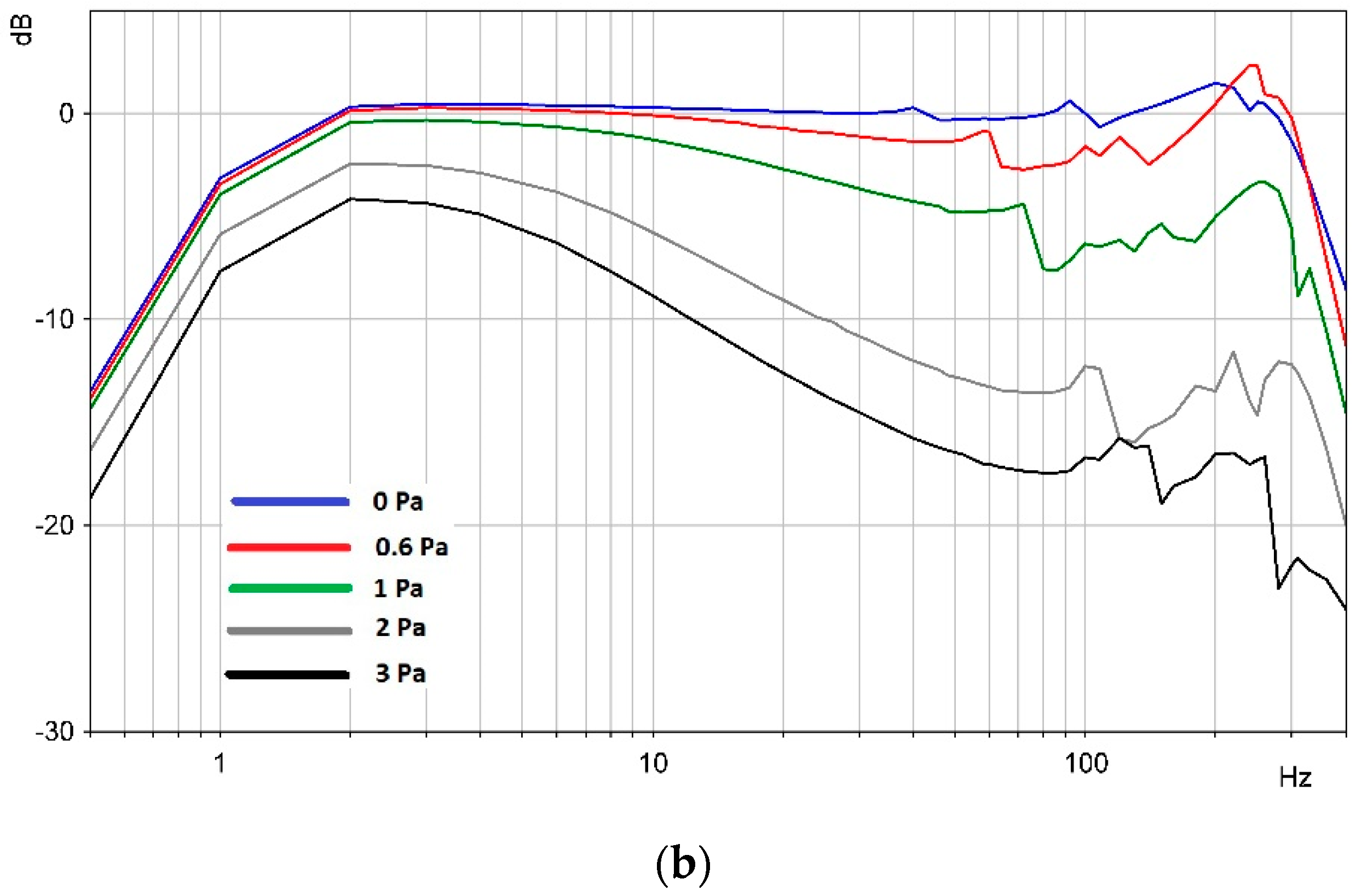
3.1. Frequency Response Characteristic Measurement
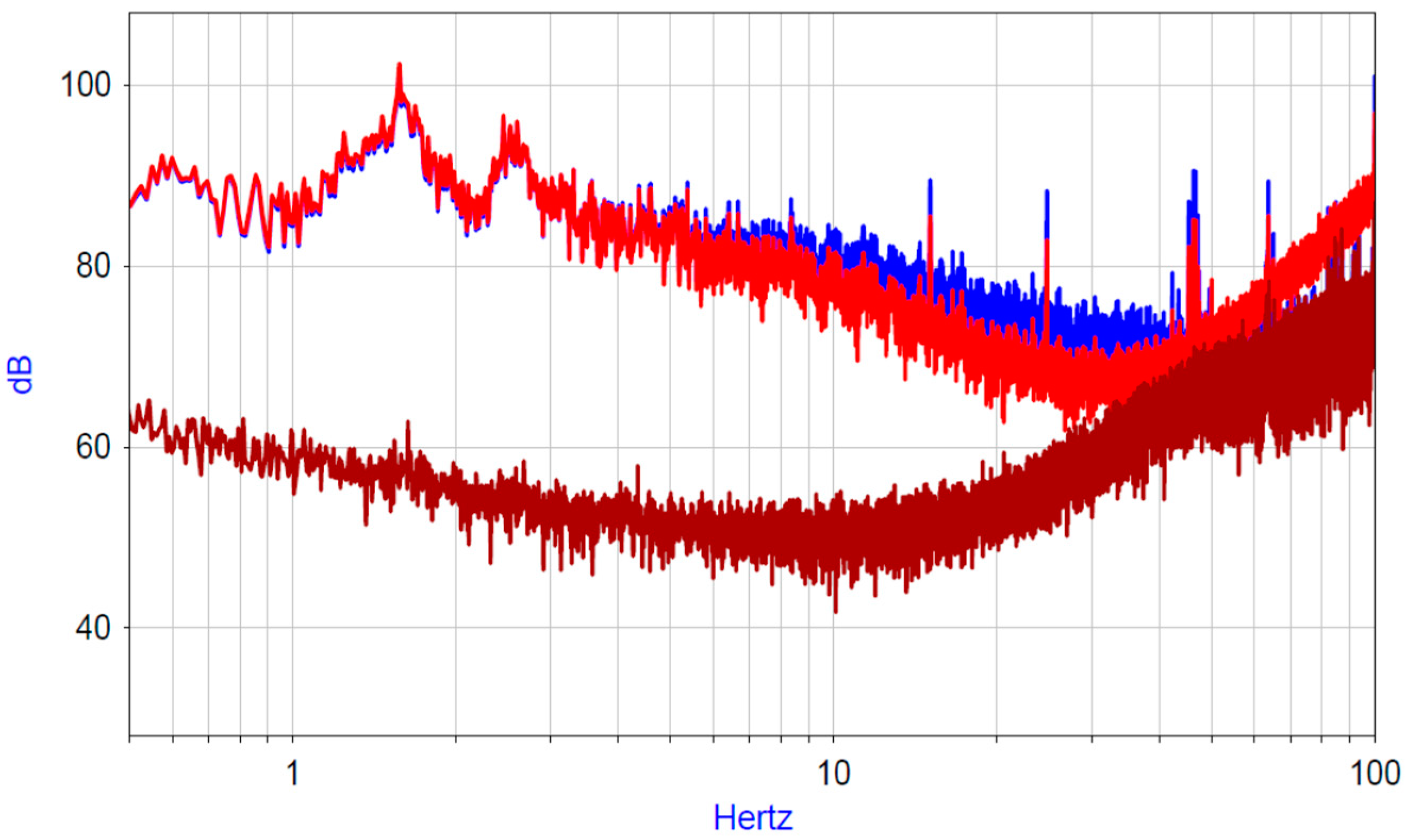
3.2. Self-Noise Measurement
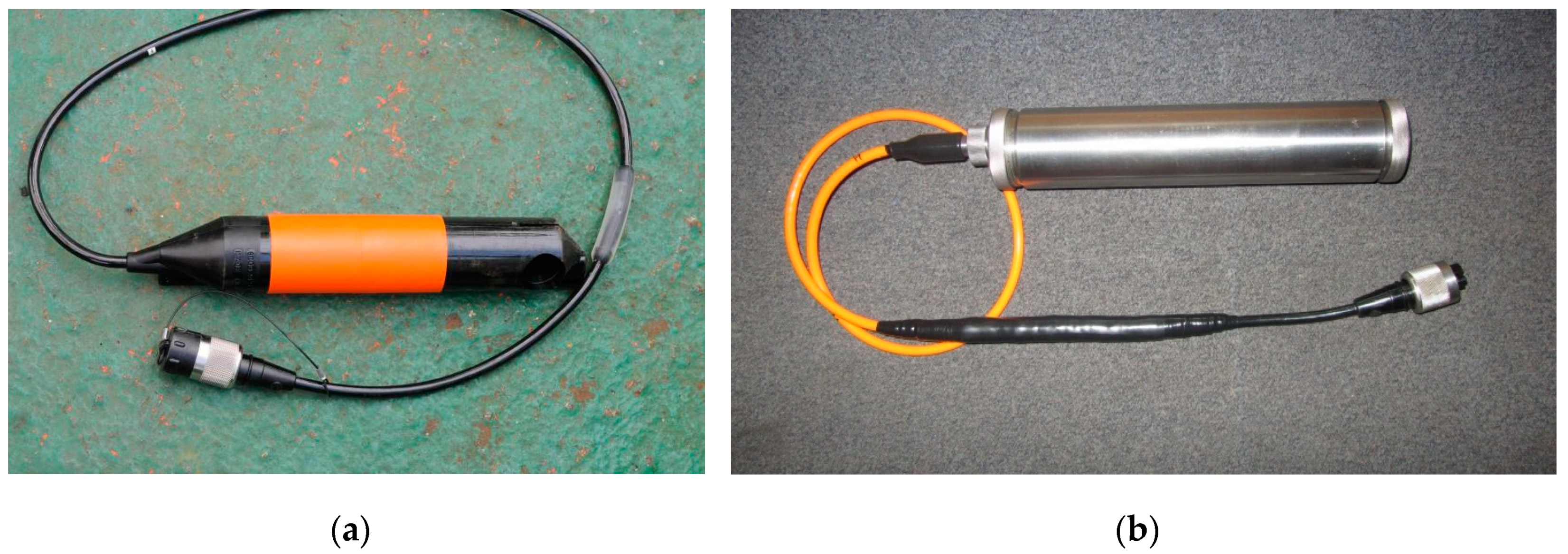
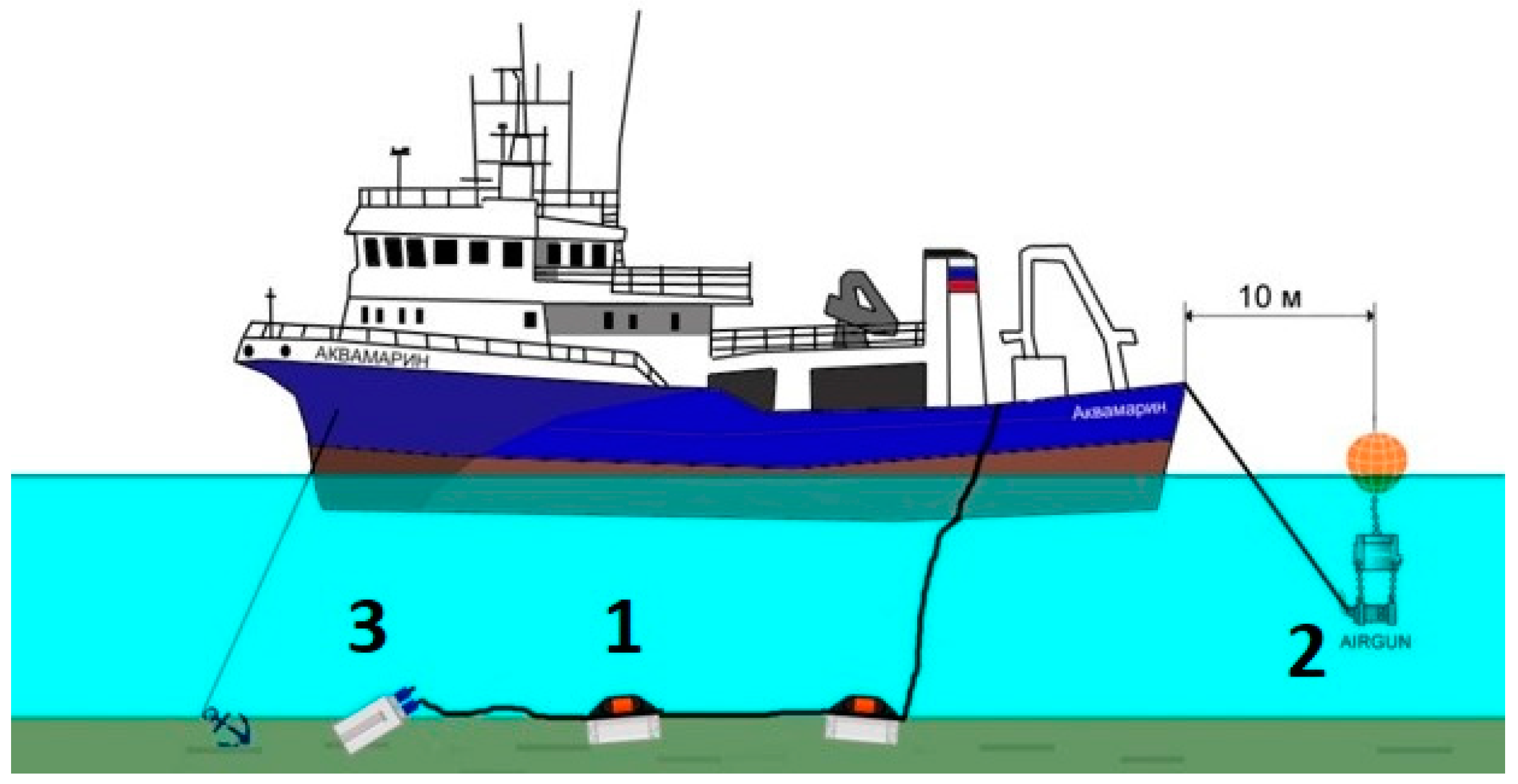
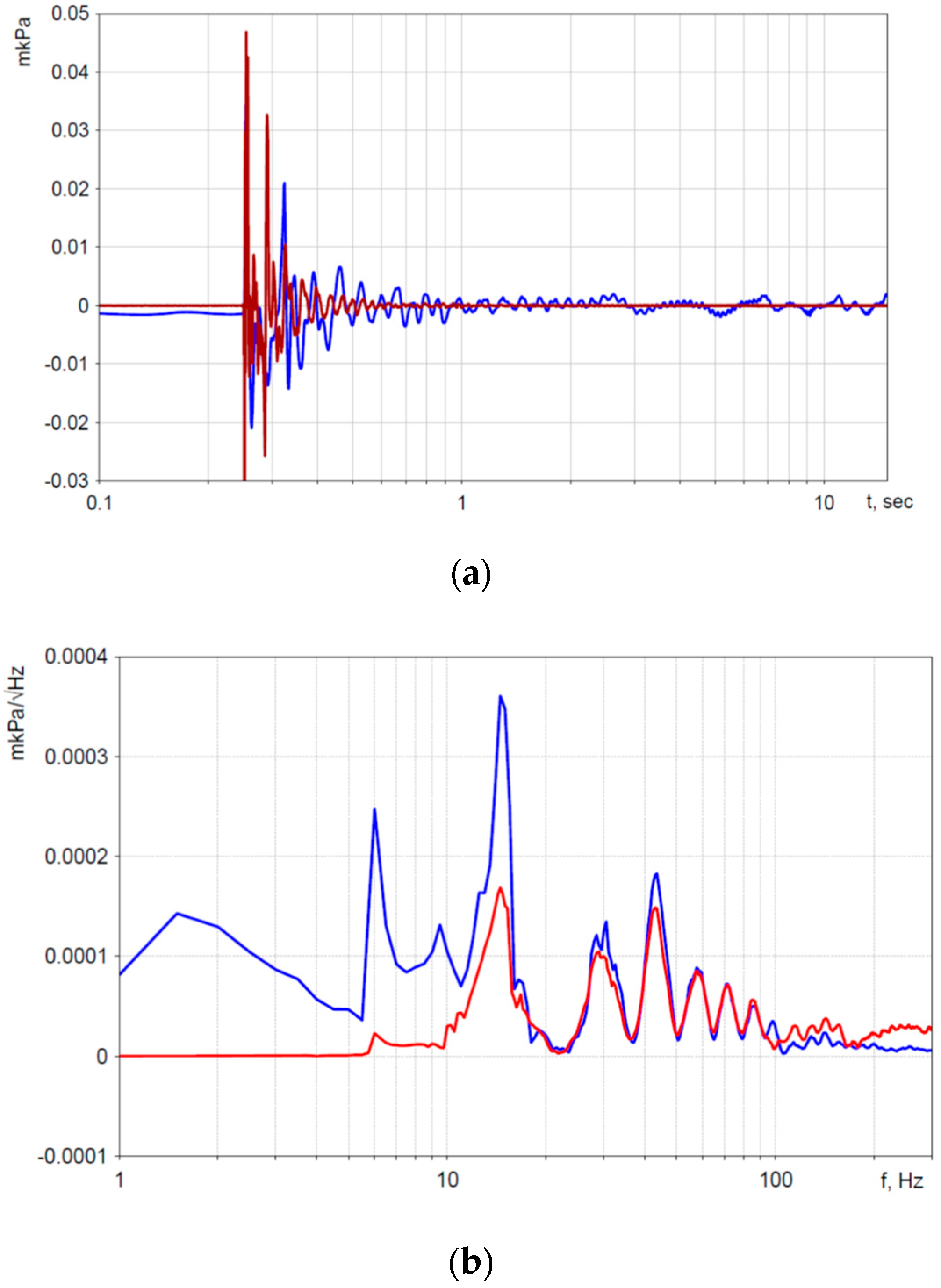
4. Marine Experiments
5. Discussion
6. Conclusions
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Agafonov, V.M.; Egorov, I.V.; Shabalina, A.S. Operating principles and specifications of small-size molecular electronic seismic sensor with negative feedback. Seismic Instrum. 2013, 49, 5–19. [Google Scholar]
- Chikishev, D.A.; Zaitsev, D.L.; Belotelov, K.S.; Egorov, I.V. The Temperature Dependence of Amplitude–Frequency Response of the MET Sensor of Linear Motion in a Broad Frequency Range. IEEE Sens. J. 2019, 19, 9653–9661. [Google Scholar] [CrossRef]
- Bugaev, A.S.; Antonov, A.N.; Agafonov, V.M.; Belotelov, K.S.; Dudkin, P.V.; Egorov, E.V.; Egorov, I.V.; Krishtop, T.V.; Neeshpapa, A.V.; Popov, V.G.; et al. Molecular electronic transducers for measuring instruments. J. Commun. Technol. Electron. 2018, 63, 1339–1351. [Google Scholar] [CrossRef]
- Evseev, I.; Zaitsev, D.; Agafonov, V. Study of Transfer Characteristics of a Molecular Electronic Sensor for Borehole Surveys at High Temperatures and Pressures. Sensors 2019, 19, 2545. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharapov, I.R.; Shabalin, N.Y.; Birialtsev, E.V.; Feofilov, S.A.; Ryzhov, V.A. Innovative passive microseismic methods in the oil and gas industry—Experience of use in Russia. In Proceedings of the IV International Geological Conference “AtyrauGeo-2017”, Kazakhstan, Atyrau, 24–25 May 2017. [Google Scholar]
- Gueorguiev, N.; Nachev, A.; Varbanov, V. An Approach for Determining the Location of an Object Detected by a Sensor. In Proceedings of the 2019 1st International Conference on Control Systems, Mathematical Modelling, Automation and Energy Efficiency (SUMMA), Lipetsk, Russia, 20–22 November 2019. [Google Scholar]
- Deng, T.; Chen, D.; Chen, J.; Sun, Z.; Wang, J. Microelectromechanical Systems-Based Electrochemical Seismic Sensors with Insulating Spacers Integrated Electrodes for Planetary Exploration. IEEE Sens. J. 2015, 16, 650–653. [Google Scholar] [CrossRef]
- Levchenko, D.G.; Kuzin, I.P.; Safonov, M.V.; Sychikov, V.N.; Ulomov, I.V.; Kholopov, B.V. Experience in seismic signal recording using broadband electrochemical seismic sensors. Seism. Instruments 2018, 46, 250–264. [Google Scholar] [CrossRef]
- Dimitrov, D.L.; Panevski, V.S.; Nikolov, G.M. Example of security management system of the organization—Components and concepts. Sci. Bus. Soc. 2016, 1, 37–40. [Google Scholar]
- Antonovskaya, G.N.; Kapustian, N.K.; Moshkunov, A.I.; Danilov, A.V.; Moshkunov, K.A. New seismic array solution for earthquake observations and hydropower plant health monitoring. J. Seismol. 2017, 21, 1039–1053. [Google Scholar] [CrossRef]
- Georgiev, N. Quality criteria for critical infrastructure protection systems. Int. J. Economics Commerce Manag. 2018, 6, 265–271. [Google Scholar]
- Evseev, I.A.; Zaitsev, D.L.; Agafonov, V.M. Study of Systems Error Compensation Methods Based on Molecular-Electronic Transducers of Motion Parameters. J. Sens. 2018, 2018, 6261384. [Google Scholar]
- Egorov, E.V.; Agafonov, V.M.; Avdyukhina, S.Y.; Borisov, S. Angular molecular–electronic sensor with negative magnetohydrodynamic feedback. Sensors 2018, 18, 245. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zaitsev, D.; Egorov, E.; Shabalina, A. High resolution miniature MET sensors for healthcare and sport applications. In Proceedings of the 12th International Conference on Sensing Technology (ICST), Limerick, Ireland, 4–6 December 2018; pp. 287–292. [Google Scholar]
- Agafonov, V.M.; Zaitsev, D.L.; Avdukhina, S.; Egorov, E.V. Broadband MET hydrophone. In Proceedings of the 80th EAGE Conference & Exhibition 2018, Copenhagen, Denmark, 11–14 June 2018. [Google Scholar]
- Avdyukhina, S.; Zaitsev, D.L.; Agafonov, V.M.; Academician Bugaev, A.S.; Egorov, E.V. A Molecular-Electronic Hydrophone for Low-Frequency Research of Ambient Noise in the World Ocean. Dokl. Earth Sci. 2018, 483, 1579–1581. [Google Scholar]
- Zaitsev, D.L.; Avdyukhina, S.; Ryzhkov, M.A.; Evseev, I.; Egorov, E.V.; Agafonov, V.M. Frequency response and self-noise of the MET hydrophone. J. Sens. Sens. Syst. 2018, 7, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Zaitsev, D.; Egorov, E.; Ryzhkov, M.; Velichko, G.; Gulenko, V. Low-frequency, low-noise molecular electronic hydrophone for offshore and tranzit zone seismic exploration. In Proceedings of the 19th International Multidisciplinary Scientific Geoconference & EXPO (SGEM), Albena, Bulgaria, 28 June–7 July 2019; Volume 19, pp. 961–968. [Google Scholar]
- Egorov, E.V.; Shabalina, A.S.; Zaytsev, D.L.; Velichko, G. Low Frequency Hydrophone for Marine Seismic Exploration Systems. In Proceedings of the 5th International Conference on Sensors Engineering and Electronics Instrumentation Advances (SEIA’ 2019), Canary Islands (Tenerife), Spain, 25–27 September 2019; pp. 69–70. [Google Scholar]
- Agafonov, V.M.; Krishtop, V.G. Diffusion Sensor of Mechanical Signals: Frequency Response at High Frequencies. Russ. J. of Electrochem. 2004, 40, 537–541. [Google Scholar] [CrossRef]
- Egorov, I.V.; Shabalina, A.S.; Agafonov, V.M. Design and Self-Noise of MET Closed-Loop Seismic Accelerometers. IEEE Sens. J. 2018, 17, 2008–2014. [Google Scholar] [CrossRef]
- Shabalina, A.S.; Egorov, E.V.; Rudakov, A.V.; Vishnyakov, A.V. The ocean-bottom seismic cable system based on low-noise high-sensitive molecular-electronic transfer sensors. In Proceedings of the 19th International Multidisciplinary Scientific Geoconference & EXPO (SGEM), Albena, Bulgaria, 28 June–7 July 2019; Volume 19, pp. 1125–1132. [Google Scholar]
- Agafonov, V.; Shabalina, A.; Ma, D.; Krishtop, V. Modeling and experimental study of convective noise in electrochemical planar sensitive element of MET motion sensor. Sens. Actuator A Phys. 2019, 293, 259–268. [Google Scholar] [CrossRef]
- Agafonov, V.M. Modeling the Convective Noise in an Electrochemical Motion Transducer. Int. J. Electrochem. Sci. 2018, 13, 11432–11442. [Google Scholar]
- Seismic Instruments. Available online: www.r-sensors.ru (accessed on 1 March 2020).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Egorov, E.; Shabalina, A.; Zaitsev, D.; Kurkov, S.; Gueorguiev, N. Frequency Response Stabilization and Comparative Studies of MET Hydrophone at Marine Seismic Exploration Systems. Sensors 2020, 20, 1944. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071944
Egorov E, Shabalina A, Zaitsev D, Kurkov S, Gueorguiev N. Frequency Response Stabilization and Comparative Studies of MET Hydrophone at Marine Seismic Exploration Systems. Sensors. 2020; 20(7):1944. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071944
Chicago/Turabian StyleEgorov, Egor, Anna Shabalina, Dmitry Zaitsev, Sergey Kurkov, and Nikolay Gueorguiev. 2020. "Frequency Response Stabilization and Comparative Studies of MET Hydrophone at Marine Seismic Exploration Systems" Sensors 20, no. 7: 1944. https://0-doi-org.brum.beds.ac.uk/10.3390/s20071944