Data Description Technique-Based Islanding Classification for Single-Phase Grid-Connected Photovoltaic System

 ,
,  , , and
, , and
Abstract
:1. Introduction
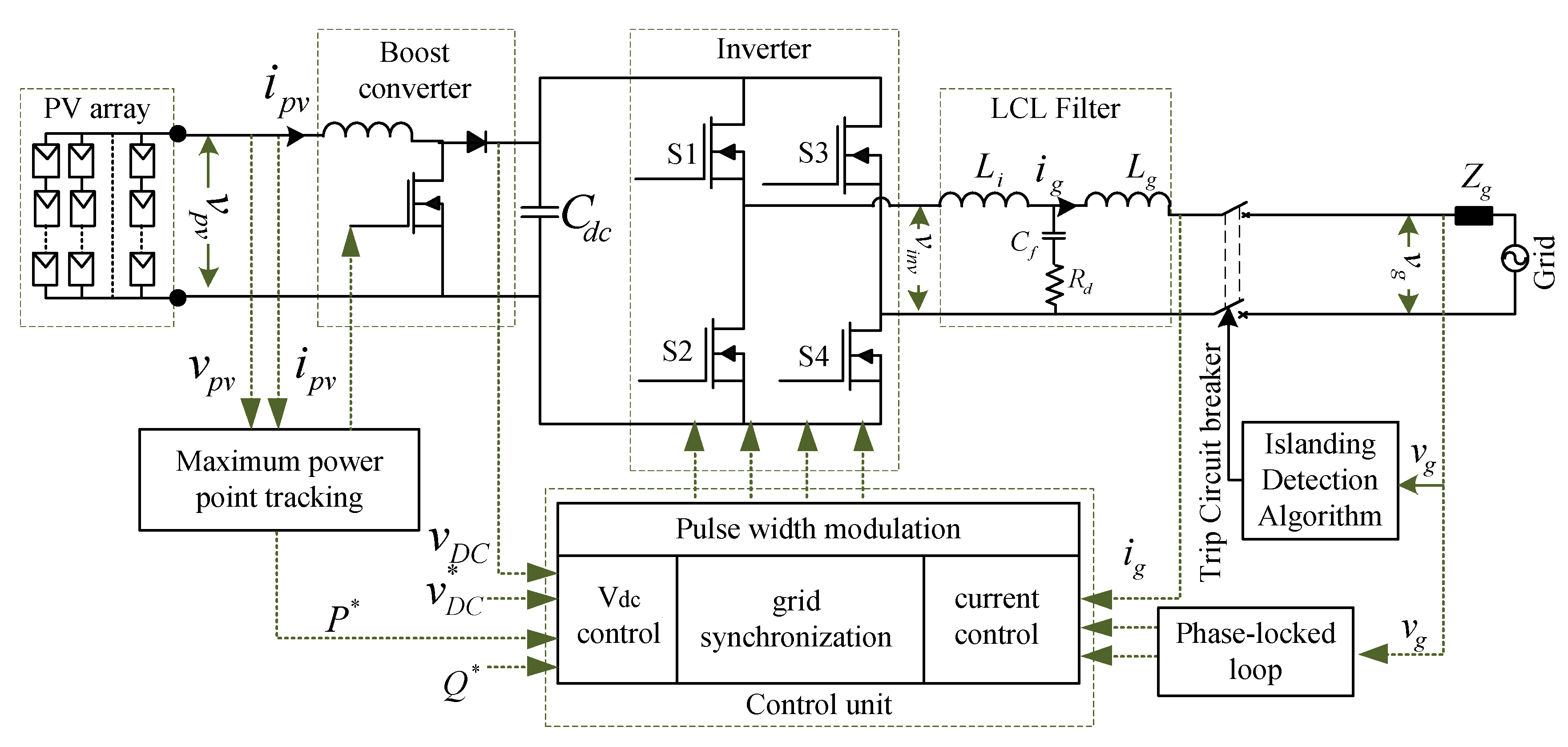
2. Grid-Connected PV System
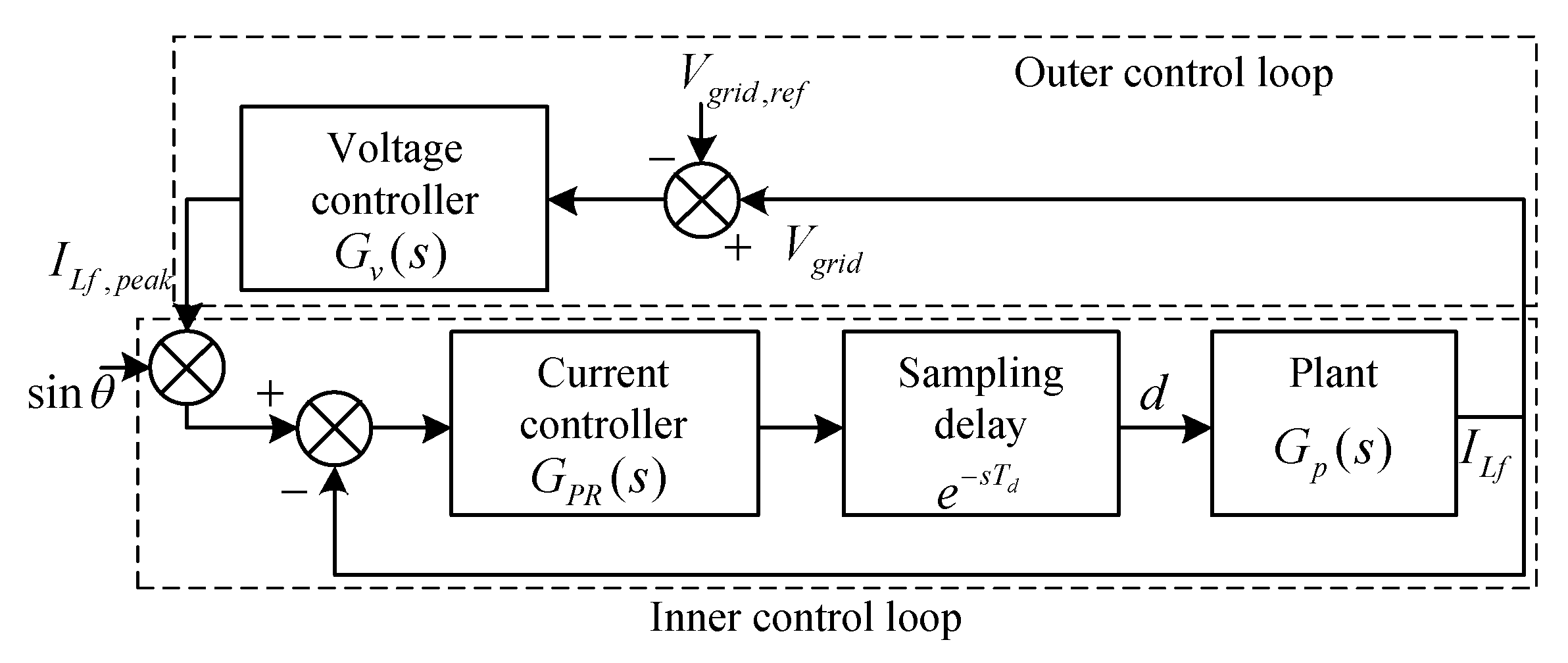
2.1. Inner Control Loop
2.2. Outer Control Loop
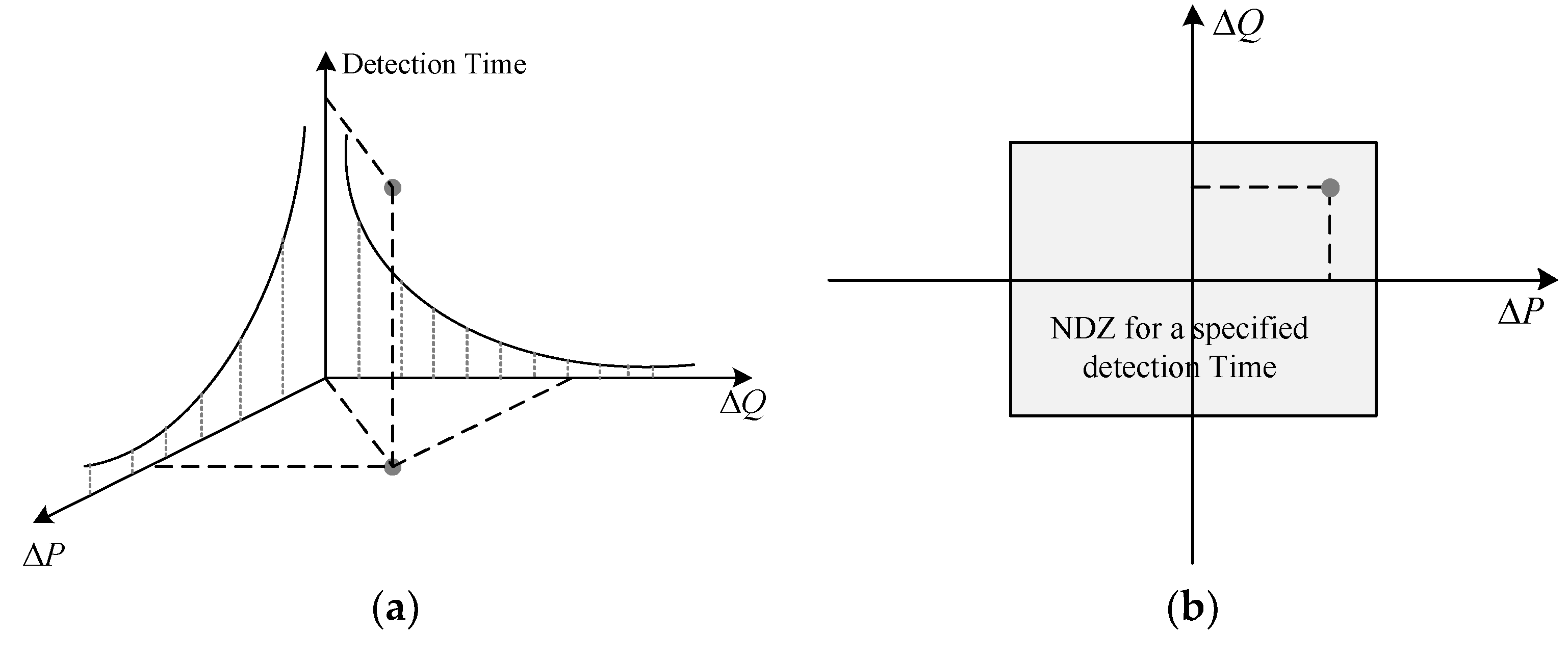
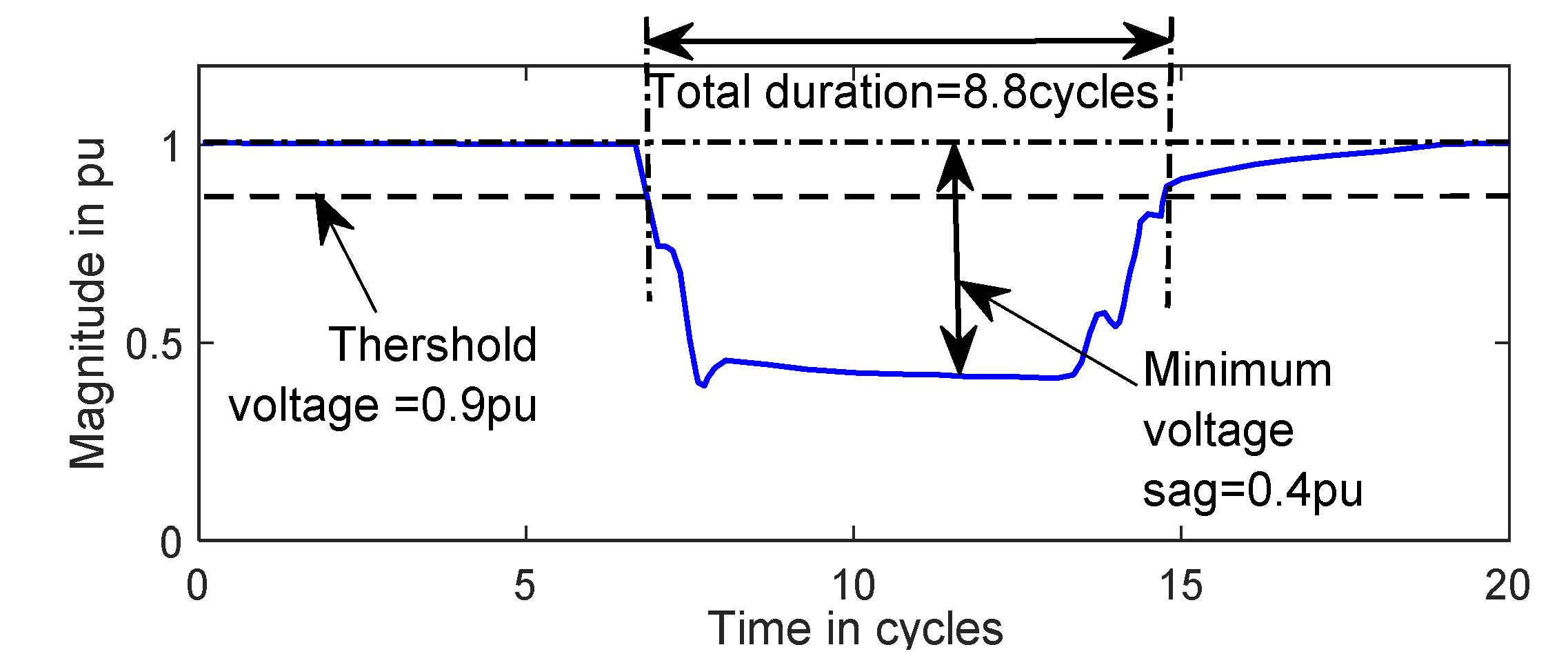
3. Islanding Scenarios and Grid Requirements
4. Prerequisites for Classifier Development
4.1. Data Preparation under an Islanding Scenario
4.2. Feature Extraction
4.3. Classifier Development
4.3.1. Support Vector Machine
4.3.2. Islanding Classifier Using SVM
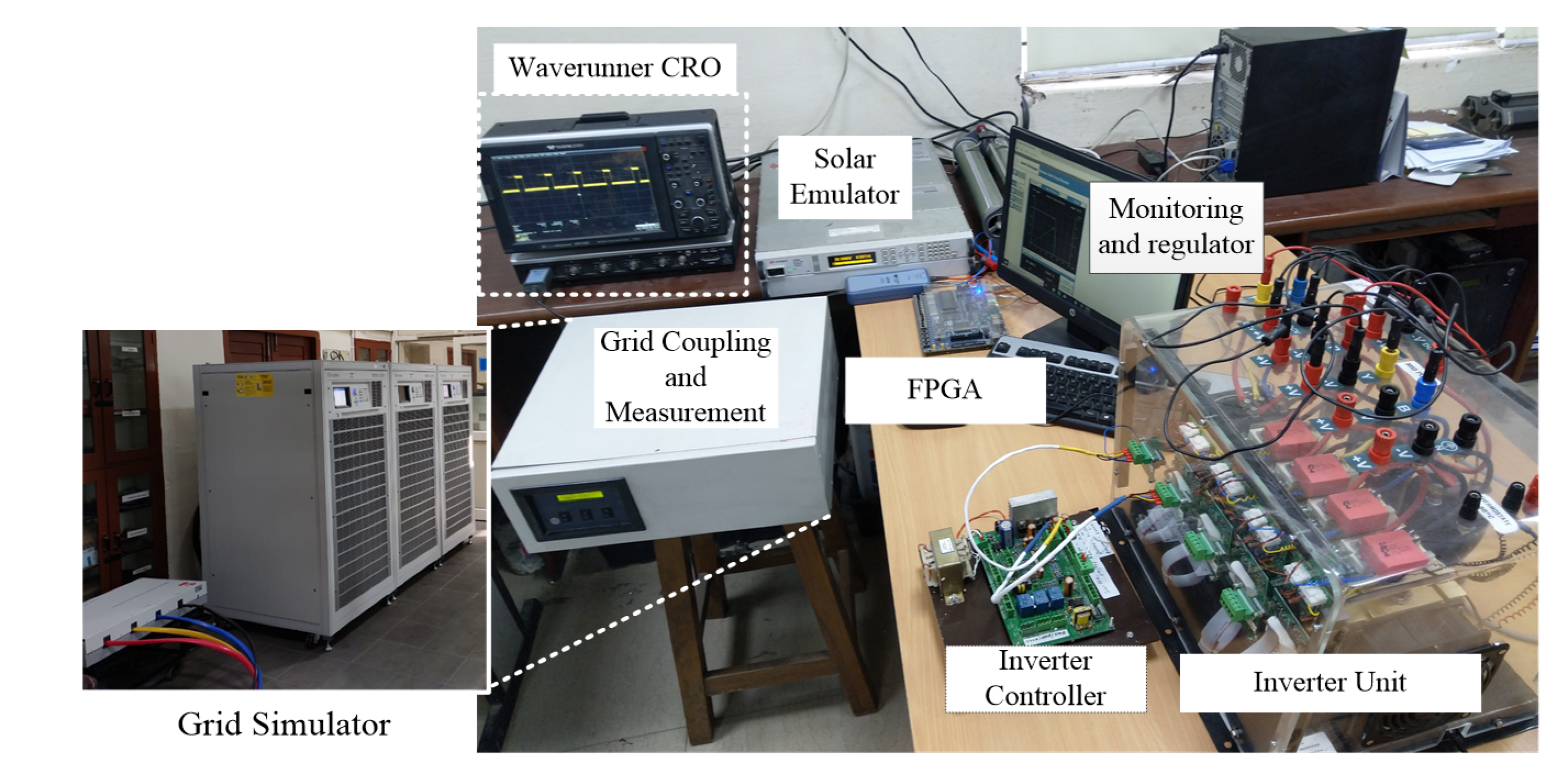
5. Experiment and Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Gielen, D.; Boshell, F.; Saygin, D.; Bazilian, M.D.; Wagner, N.; Gorini, R. The role of renewable energy in the global energy transformation. Energy Strategy Rev. 2019, 24, 38–50. [Google Scholar] [CrossRef]
- Marinakis, V.; Doukas, H.; Koasidis, K.; Albuflasa, H. From Intelligent Energy Management to Value Economy through a Digital Energy Currency: Bahrain City Case Study. Sensors 2020, 20, 1456. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- D’Adamo, I. The Profitability of Residential Photovoltaic Systems. A New Scheme of Subsidies Based on the Price of CO2 in a Developed PV Market. Soc. Sci. 2018, 7, 148. [Google Scholar] [CrossRef] [Green Version]
- Liao, Y.; Fan, W.; Cramer, A.; Dolloff, P.; Fei, Z.; Qiu, M.; Bhattacharyya, S.; Holloway, L.; Gregory, B. Voltage and Var Control to Enable High Penetration of Distributed Photovoltaic Systems. In 2012 North American Power Symposium (NAPS); IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Singh, P.; Pradhan, A.K. A Local measurement based protection technique for distribution system with photovoltaic plants. IET Renew. Power Gener. 2020, 14, 996–1003. [Google Scholar] [CrossRef]
- Suman, M.; Kirthiga, M.V. Unintentional islanding detection. In Distributed Energy Resources in Microgrids; Elsevier: Amsterdam, The Netherlands, 2019; pp. 419–440. [Google Scholar]
- The Institute of Electrical and Electronics Engineers—IEEE. IEEE 929-1988 Recommended Practice for Utility Interface of Residential and Intermediate Photovoltaic (PV) Systems; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 62116-2014; IEC: London, UK, 2014. [Google Scholar]
- IEEE STD 1547-2018. In IEEE Standard for Interconnection and Interoperability of Distributed Energy Resources with Associated Electric Power Systems Interfaces; IEEE: Piscataway, NJ, USA, 2018. [CrossRef]
- Khamis, A.; Shareef, H.; Bizkevelci, E.; Khatib, T. A review of islanding detection techniques for renewable distributed generation systems. Renew. Sustain. Energy Rev. 2013, 28, 483–493. [Google Scholar] [CrossRef]
- Artale, G.; Cataliotti, A.; Cosentino, V.; Di Cara, D.; Fiorelli, R.; Guaiana, S.; Panzavecchia, N.; Tinè, G. A new PLC-based smart metering architecture for medium/low voltage grids: Feasibility and experimental characterization. Measurement 2018, 129, 479–488. [Google Scholar] [CrossRef]
- Bayrak, G.; Cebeci, M. A Communication Based Islanding Detection Method for Photovoltaic Distributed Generation Systems. Int. J. Photoenergy 2014, 2014, 1–17. [Google Scholar] [CrossRef]
- Laaksonen, H. Advanced Islanding Detection Functionality for Future Electricity Distribution Networks. IEEE Trans. Power Deliv. 2013, 28, 2056–2064. [Google Scholar] [CrossRef]
- Ye, Z.; Kolwalkar, A.; Zhang, Y.; Du, P.; Walling, R. Evaluation of Anti-Islanding Schemes Based on Nondetection Zone Concept. IEEE Trans. Power Electron. 2004, 19, 1171–1176. [Google Scholar] [CrossRef]
- Li, C.; Cao, C.; Cao, Y.; Kuang, Y.; Zeng, L.; Fang, B. A review of islanding detection methods for microgrid. Renew. Sustain. Energy Rev. 2014, 35, 211–220. [Google Scholar] [CrossRef]
- Mahat, P.; Chen, Z.; Bak-Jensen, B. Review of islanding detection methods for distributed generation. In 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies; IEEE: Piscataway, NJ, USA, 2008; pp. 2743–2748. [Google Scholar]
- Seyedi, M.; Taher, S.A.; Ganji, B.; Guerrero, J.M. A hybrid islanding detection technique for inverter-based distributed generator units. Int. Trans. Electr. Energy Syst. 2019, 29, 11. [Google Scholar] [CrossRef]
- Hmad, J.; Houari, A.; Trabelsi, H.; Machmoum, M. Fuzzy logic approach for smooth transition between grid-connected and stand-alone modes of three-phase DG-inverter. Electr. Power Syst. Res. 2019, 175, 105892. [Google Scholar] [CrossRef]
- Hashemi, F.; Ghadimi, N.; Sobhani, B. Islanding detection for inverter-based DG coupled with using an adaptive neuro-fuzzy inference system. Int. J. Electr. Power Energy Syst. 2013, 45, 443–455. [Google Scholar] [CrossRef]
- Fatama, A.; Haque, A.; Khan, M.A. A Multi Feature Based Islanding Classification Technique for Distributed Generation Systems. In 2019 International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon); IEEE: Piscataway, NJ, USA, 2019; pp. 160–166. [Google Scholar]
- Baghaee, H.R.; Mlakic, D.; Nikolovski, S.; Dragicevic, T.D. Support Vector Machine-based Islanding and Grid Fault Detection in Active Distribution Networks. IEEE J. Emerg. Sel. Top. Power Electron. 2019. [Google Scholar] [CrossRef]
- Khan, M.A.; Haque, A.; Kurukuru, V.S.B. Machine Learning Based Islanding Detection for Grid Connected Photovoltaic System. In 2019 International Conference on Power Electronics, Control and Automation (ICPECA); IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Carrasco, J.M.; Franquelo, L.G.; Bialasiewicz, J.T.; Galvan, E.; PortilloGuisado, R.C.; Prats, M.A.M.; Leon, J.I.; Moreno-Alfonso, N. Power-Electronic Systems for the Grid Integration of Renewable Energy Sources: A Survey. IEEE Trans. Ind. Electron. 2006, 53, 1002–1016. [Google Scholar] [CrossRef]
- Panda, A.; Pathak, M.K.; Srivastava, S.P. A single phase photovoltaic inverter control for grid connected system. Sadhana 2016, 41, 15–30. [Google Scholar] [CrossRef] [Green Version]
- Kafle, Y.R.; Town, G.E.; Guochun, X.; Gautam, S. Performance comparison of single-phase transformerless PV inverter systems. In 2017 IEEE Applied Power Electronics Conference and Exposition (APEC); IEEE: Piscataway, NJ, USA, 2017; pp. 3589–3593. [Google Scholar]
- Rajeev, M.; Agarwal, V. Analysis and Control of a Novel Transformer-Less Microinverter for PV-Grid Interface. IEEE J. Photovolt. 2018, 8, 1110–1118. [Google Scholar] [CrossRef]
- Axelberg, P.G.V.; Gu, I.Y.-H.; Bollen, M.H.J. Support Vector Machine for Classification of Voltage Disturbances. IEEE Trans. Power Deliv. 2007, 22, 1297–1303. [Google Scholar] [CrossRef]
- Institute of Electrical & Electronics Engineers. IEEE C37.95: 2014 Guide for Protective Relaying of Utility-Consumer Interconnections; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Institute of Electrical & Electronics Engineers. IEEE 929-2000 Recommended Practice for Utility Interface of Photovoltaic (PV) Systems; IEEE: Piscataway, NJ, USA, 2000. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. IEC 61727 Photovoltaic (PV)—Characteristics of the Utility Interface; IEC: London, UK, 2004. [Google Scholar]
- Far, H.G.; Rodolakis, A.J.; Joos, G. Synchronous Distributed Generation Islanding Protection Using Intelligent Relays. IEEE Trans. Smart Grid 2012, 3, 1695–1703. [Google Scholar] [CrossRef]
- Vieira, J.C.M.; Freitas, W.; Xu, W.; Morelato, A. An Investigation on the Nondetection Zones of Synchronous Distributed Generation Anti-Islanding Protection. IEEE Trans. Power Deliv. 2008, 23, 593–600. [Google Scholar] [CrossRef]
- Khoa, N.M.; Viet, D.T.; Hieu, N.H. Classification of power quality disturbances using wavelet transform and K-nearest neighbor classifier. In 2013 IEEE International Symposium on Industrial Electronics; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Zhan, L.; Bollen, M.H.J. Characteristic of voltage dips (sags) in power systems. IEEE Trans. Power Deliv. 2000, 15, 827–832. [Google Scholar] [CrossRef]
- IEEE Recommended Practice for Evaluating Electric Power System Compatibility With Electronic Process Equipment. In IEEE Std. 1346–1998; IEEE: Piscataway, NJ, USA, 1998. [CrossRef]
- IEEE Recommended Practice for Monitoring Electric Power Quality. In IEEE Std. 1159–2019 (Revision IEEE Std. 1159-2009); IEEE: Piscataway, NJ, USA, 2019; pp. 1–98.
- Weldemariam, L.E.; Cuk, V.; Cobben, J.F.G. A proposal on voltage dip regulation for the Dutch MV distribution networks. Int. Trans. Electr. Energy Syst. 2019, 29, e2734. [Google Scholar] [CrossRef] [Green Version]
- Han, Y.; Li, H.; Shen, P.; Coelho, E.A.A.; Guerrero, J.M. Review of Active and Reactive Power Sharing Strategies in Hierarchical Controlled Microgrids. IEEE Trans. Power Electron. 2017, 32, 2427–2451. [Google Scholar] [CrossRef] [Green Version]
- Alam, M.R.; Muttaqi, K.M.; Bouzerdoum, A. An Approach for Assessing the Effectiveness of Multiple-Feature-Based SVM Method for Islanding Detection of Distributed Generation. IEEE Trans. Ind. Appl. 2014, 50, 2844–2852. [Google Scholar] [CrossRef] [Green Version]
- Abe, S. Support Vector Machines for Pattern Classification; Springer: London, UK, 2010; Volume 2, p. 44. [Google Scholar]
- Canu, S. SVM and Kernel machine Lecture 1: Linear SVM. Available online: https://cel.archives-ouvertes.fr/cel-01003007/file/Lecture1_Linear_SVM_Primal.pdf (accessed on 15 April 2020).
- Wang, W.; Xu, Z.; Lu, W.; Zhang, X. Determination of the spread parameter in the Gaussian kernel for classification and regression. Neurocomputing 2003, 55, 643–663. [Google Scholar] [CrossRef]
- Pastrana, S.; Mitrokotsa, A.; Orfila, A.; Peris-Lopez, P. Evaluation of classification algorithms for intrusion detection in MANETs. Knowl. Based Syst. 2012, 36, 217–225. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Islanding Type | Scenario | Description of Islanding Scenario |
|---|---|---|
| Islanding | Scenario 1 | Tripping the circuit breaker at the grid interconnection with three different loads, constant power load, constant impedance load, and constant current load. |
| Scenario 2 | Creating four different power imbalance conditions with excess and deficient power:
| |
| Non-Islanding | Scenario 3 | Switching of inductive, capacitor and nonlinear loads for less than 10 cycles per observation for constant impedance, power, and current loads. |
| Scenario 4 | Transient faults with a clearing time less than 0.05 to 0.1 sec for constant impedance, power, and current loads. |
| System | Parameter | Values |
|---|---|---|
| PV Array Simulator 5 kWP using (Topsun solar 250 W Modules) | Module Characteristics | |
| Power | ||
| Short circuit current of the module | ||
| Open circuit voltage of module | ||
| Maximum power point current | ||
| Maximum power point voltage | ||
| Inverter Stack (Semikron) | Maximum continuous output current | to 1200 |
| Switching frequency | 5 kHz | |
| Maximum inverter output voltage | 690 | |
| DC bus voltage | 1100 | |
| Grid Simulator | Output power | 30 kVA |
| Output voltage | 0~300 V | |
| Output frequency | 30 Hz–100 Hz | |
| Event | No. of Samples | Event Class |
|---|---|---|
| Scenario 1 | 300 samples | Islanding |
| Scenario 2 | 300 samples | |
| Scenario 3 | 195 samples | Non-islanding |
| Scenario 4 | 195 samples |
| Load | Islanding | Non-Islanding | ||||
|---|---|---|---|---|---|---|
| Excess and Deficient Power Imbalances | Number of Samples | Number of Samples | ||||
| Training | Testing | Training | Testing | |||
| Constant power | 0–100 | 0–50 | ||||
| Constant impedance | 0–100 | 0–50 | ||||
| Constant current | 0–100 | 0–50 | ||||
| Total | ||||||
| Kernel Parameter | Value |
|---|---|
| Kernel type | Gaussian radial basis function |
| Kernel regularization parameter | 1 |
| Support vectors | 36 |
| Detection rate | 99.2% |
| False alarm | 0.2% |
| Load | Detection Rate | False Alarm |
|---|---|---|
| Constant power | ||
| Constant impedance | ||
| Constant current | ||
| Constant power, current, and impedance |
| Islanding Conditions | Scenario 1 | Scenario 2 | Scenario 3 | Scenario 4 | |||||
|---|---|---|---|---|---|---|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Haque, A.; Alshareef, A.; Khan, A.I.; Alam, M.M.; Kurukuru, V.S.B.; Irshad, K. Data Description Technique-Based Islanding Classification for Single-Phase Grid-Connected Photovoltaic System. Sensors 2020, 20, 3320. https://0-doi-org.brum.beds.ac.uk/10.3390/s20113320
Haque A, Alshareef A, Khan AI, Alam MM, Kurukuru VSB, Irshad K. Data Description Technique-Based Islanding Classification for Single-Phase Grid-Connected Photovoltaic System. Sensors. 2020; 20(11):3320. https://0-doi-org.brum.beds.ac.uk/10.3390/s20113320
Chicago/Turabian StyleHaque, Ahteshamul, Abdulaziz Alshareef, Asif Irshad Khan, Md Mottahir Alam, Varaha Satya Bharath Kurukuru, and Kashif Irshad. 2020. "Data Description Technique-Based Islanding Classification for Single-Phase Grid-Connected Photovoltaic System" Sensors 20, no. 11: 3320. https://0-doi-org.brum.beds.ac.uk/10.3390/s20113320