An Application of the Orthogonal Matching Pursuit Algorithm in Space-Time Adaptive Processing


Faculty of Electronics, Institute of Radioelectronics, Military University of Technology, Gen. S. Kaliskiego 2, 00-908 Warsaw, Poland
*
Author to whom correspondence should be addressed.
Sensors 2020, 20(12), 3468; https://0-doi-org.brum.beds.ac.uk/10.3390/s20123468
Submission received: 25 May 2020
/
Revised: 15 June 2020
/
Accepted: 16 June 2020
/
Published: 19 June 2020
(This article belongs to the Special Issue Microwave Sensors and Radar Techniques)
Abstract
:The article presents a new space-time adaptive processing (STAP) method for target detection in a heterogeneous and non-stationary environment. In study it was proven that it is possible to estimate the clutter covariance matrix (CCM) in STAP by using the MIMO (Multiple Input Multiple Output) radar geometry model and the orthogonal matching pursuit (OMP) algorithm. For the estimation of spatio-temporal spectrum of clutter and target, a model of joint sparse recovery was established. As a result, clutter suppression and target detection in a heterogeneous environment will be achieved. In addition, the proposed method uses a single snapshot of the radar data cube, which eliminates the need for access to all training cells.
1. Introduction
STAP is an effective method for airborne radar system to suppress clutter and detect targets. Currently, many scientists studying the possibility of using the STAP technique are trying to answer the question of how to accurately estimate the key in the entire STAP processing algorithm, the clutter covariance matrix (CCM).
Classic, statistical STAP algorithms suppress clutter by estimating the CCM, which is based on the data contained in the training cells surrounding the range cell under scrutiny. Unfortunately, the clutter occurring in a real environment is heterogeneous. Hence, the data contained in the training cells do not reflect the statistical properties of clutter. In addition, such algorithms require a large number of independent and identically distributed training cells, which is also difficult to fulfil [1,2,3].
In connection with the above, a lot of research is conducted to develop a method for estimating the CCM in a heterogeneous environment. A serious of effective methods have been proposed, mainly including direct data domain (D3) methods [4,5,6], the compensation methods of non-side looking geometry [7,8], knowledge-aided (KA) methods [9,10] and the sparse recovery (SR) methods [11,12,13,14,15,16,17].
Currently, the most advanced attempts are carried out to obtain the method of estimating the CCM by the use of a sparse recovery method with prior target information. It has been demonstrated by using a small number of training cells or in some cases one and by using the sparsity of clutter in the spatio-temporal domain that high resolution of the spatio-temporal clutter spectrum can be obtained followed by accurate estimation of the CCM.
In [12,13], sparse recovery methods are proposed for estimating the CCM, which directly uses the data contained in the test cell. As a result of this work, the accuracy of the estimation of the CCM was improved, and the performance in terms of clutter suppression and target detection was enhanced.
This article proved that it is possible to estimate the CCM by using the MIMO radar geometry model and the OMP algorithm. This configuration in combination with the properly selected system and environmental parameters allowed us to obtain very good results, and helped us to understand the approach. As a result, clutter suppression and target detection in a heterogeneous environment will be achieved. In addition, the proposed method uses a single snapshot of the radar data cube, which eliminates the need for access to all training cells.
The spatio-temporal clutter spectrum estimation problem is expressed as the joint sparse recovery problem under a sparse complete basis. The OMP algorithm was used to estimate the spatio-temporal clutter spectrum. The use of the OMP algorithm seems to be easier in practice than other methods; e.g., M-FOCUSS (M-FOCal Underdetermined System Solver). Hence, this solution was adopted as optimal. Finally, the estimated CCM is used to determine the weight vector, which causes clutter suppression and target detection. Compared with the existing methods, the proposed method allows for a more accurate estimation of the CCM and better performance of clutter suppression, as evidenced by the experiments and numerical calculations.
2. Model of System Geometry and Model of Signal
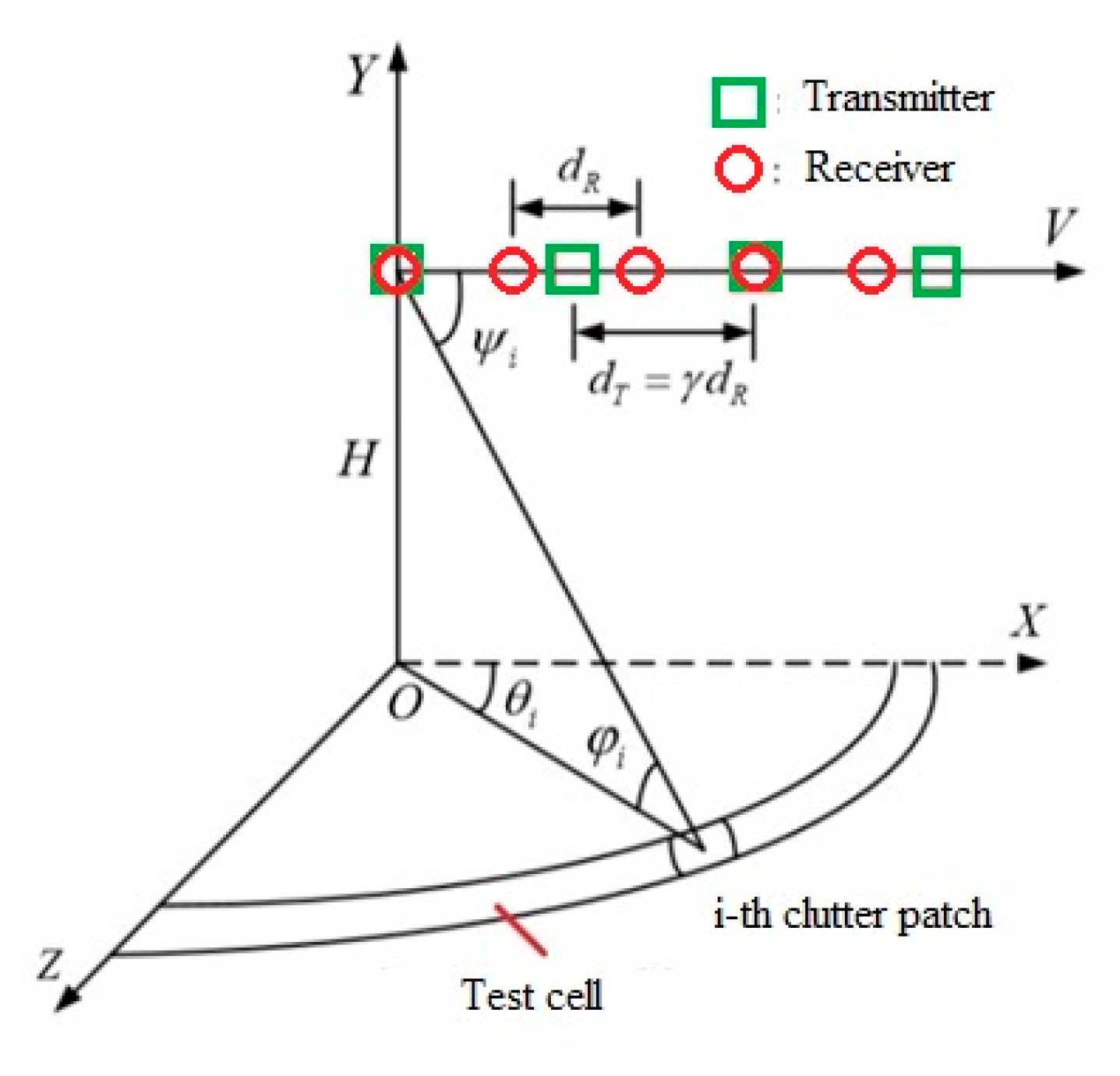
A MIMO radar with a linear uniformly array (ULA) mounted on an aircraft flying at altitude H with a constant speed of V is considered. In Figure 1 is shown the considered geometry of the MIMO radar system. The system consists of N receivers spaced apart by dR and M transmitters spaced apart by dT = αdR, where α is a specific factor. In each transmitter, K pulses are transmitted with a pulse repetition frequency of fR. 𝜃p is the angle between the antenna array and the direction of flight of the platform. It was assumed that the platform velocity vector is perfectly aligned with the antenna array axis vector; hence, 𝜃p = 0. It was assumed that the transmitted signals from different transmitters are independent and coherent.
Considering that the clutter echo data of the range test cell are the superpositions of the echoes of multiple discrete clutter patches on the range cell, the normalized Doppler frequency and the normalized spatial frequency of the ith clutter patch are expressed as [18]:
where λ is the wavelength, φi is the elevation angle and θi is the azimuth angle. Doppler frequency is related to the relative velocity relationship between a target or individual clutter patches. Spatial frequency shows the phenomenon of time difference between the arrival of signals from target or individual clutter patches to individual radar system antennas. Thus, the echo signal received by the nth element of the array corresponding to the mth transmitter and the kth pulse can be represented as [18]:
where i = 1, 2, …, NC denotes the number of discrete clutter patches; fdt and fst are the normalized Doppler frequency and normalized spatial frequency of the target; α denotes the ratio of the distance between the transmitting antennas and the distance between the receiving antennas; δi is the reflection coefficient of the ith clutter patch; δt is the reflection coefficient of the target; and nm,n,k denotes noise.
By collating the received echo of the mth transmitted waveform for all receivers and pulses, it was received as
where βt,m is the reflection coefficient of the target corresponding to the mth transmitted signal; βi,m is the reflection coefficient of the ith clutter patch corresponding to the mth transmitted signal; and nm is a received noise. S(fdi, fsi) and S(fdt, fst) are the space-time steering vector of the ith clutter patch and target, which can be represented as [18]:
where ⨂ denotes the Kronecker product.
3. Joint Sparse Recovery Model
For the estimation of spatio-temporal spectrum of clutter and target, a model of joint sparse recovery was established. The problem of spatio-temporal spectrum estimation was expressed as a problem of optimization of joint sparse recovery based on a complete basis of steering vector.
Due to the above, the plane of normalized Doppler frequency and normalized spatial frequency were divided into a grid with the dimensions Kd × Ns, so as to obtain denser coverage of the analysed range cell. To perform high-resolution spectrum estimation, Kd and Ns values should satisfy the dependence KdNs >> NK.
Therefore, the data received by the radar corresponding to a specific range cell can be expressed as [19]
where γm is the clutter and target spatio-temporal spectrum of the range cell under tests and the space-time sparsifying dictionary can be constructed as
where p = 1, 2, …, Kd, q = 1, 2, …, Ns. S(fdp, fsq) denotes the space-time steering vector of the (p–q)-th Doppler and spatial frequency pair:
According to Brennan’s rule, the rank of the clutter covariance matrix (Rc) is a measure of the minimum number of adaptive degrees of freedom necessary for a STAP processor:
According to Ward [17], where the Brennan rule regarding the system’s degrees of freedom, including clutter, has been described and analyzed, it can be concluded that the clutter can be represented by the space-time steering vectors, which are spanned by Q = rank(𝚽) clutter subspace in 𝚽. Therefore, Equation (17) can be rewritten as:
where Vm is a matrix constructed by the space-time steering vectors selected from the matrix 𝚽 and 𝛯m is the corresponding reflection coefficient vector:
Equation (21) indicates that the received data xm of the mth transmitted signal can be represented by space-time steering vectors covering the clutter subspace and the target. Thus, the spectrum γm can be expressed by steering vectors from the dictionary 𝛹. Accordingly, the γm spectrum can be obtained by solving the following optimization problem [18]:
where ‖· ‖u denotes the u-norm of matrix or vector; ε is a constant determined by noise; and s.t. denotes such that. As shown in article [18], for any transmitted signal m* (m* ≠ m), echo data can be expressed as
where
diag{∙} represents a diagonal matrix. Due to the fact that the degree of matrix 𝚽 is equal to the degree of matrix 𝚽D, Equation (25) can be written as
From Equations (21) and (25) it is known that γm* and γm have the same clutter subspace and target signal model, which indicates the corresponding sparse structure of these vectors. Finally, the sparse echo data recovery model was established as
where
4. Application of Sparse Recovery Algorithms
M-FOCCUS algorithm and OMP algorithm, which are typical joint sparse recovery algorithms, are used to solve the Equation (28) to estimate the spatio-temporal spectrum of clutter and target [19,20,21].
The estimation of 𝜰 with M-FOCCUS algorithm and OMP algorithm is equivalent to solving the following convex optimization problem [19]:
where ‖𝜰 ‖u,v = [‖ 𝜰1T ‖u,v +…+ ‖ 𝜰rT ‖u,v …+ ‖ 𝜰NKT ‖u,v]1/u denotes the Lu,v norm of 𝜰, 𝜰r is r-th element of 𝜰, u = 2, v ≤ 1. ‖∙ ‖F denotes the Frobenius norm of matrix and Σ is a constant determined by noise. The L2,1 norm of 𝜰 is the sum of the Euclidean norms of the columns of the matrix:
The individual steps of the M-FOCCUS algorithm and OMP algorithm to solve Equation (28) were included in Appendix A and Appendix B, respectively.
5. Definition of Clutter Plus Noise Covariance Matrix and Weight Vector
As a result of determining the spectrum 𝜰 through a sparse recovery algorithm, the clutter plus noise covariance matrix (CNCM) ŘSR can be calculated by [19]
where p = 1, 2, …, Kd, q = 1, 2, …, Ns, 𝜰0* is a column vector obtained by taking 2-norm of each row vector of 𝜰0. σ2 denotes power of noise; INK is a NK × NK identity matrix.
The possible Doppler frequency range of the target, which is determined by previously known information about the target is given as
System tolerances regarding Doppler frequency uncertainty and spatial frequency of the target are given as
∆d and ∆s are the resolution unit sizes specified by Kd and Ns. μd and μs are appropriate constants defined to prevent self-cancelling of the target.
If the CNCM has been determined from Equation (35), the optimal weight vector of the STAP processor can be determined by [19]
where μ is the specified constant.
6. Simulation Results
The paragraph presents simulation results to show the effectiveness of the proposed STAP method. Simulation parameters are listed in Table 1, which refer to the standard parameters set in [20].
6.1. Performance of Spatio-Temporal Spectrum Estimation and Target Detection
First, the performance of the proposed method using the OMP algorithm is shown and analysed. The maximum number of iterations was 500. The units of Doppler and spatial frequency resolution are both equal to Ns = Nd = 60. The algorithm specifies μs = μd = 4. The following drawings are provided to confirm the performance of the proposed method for determining the CCM based on the OMP algorithm.
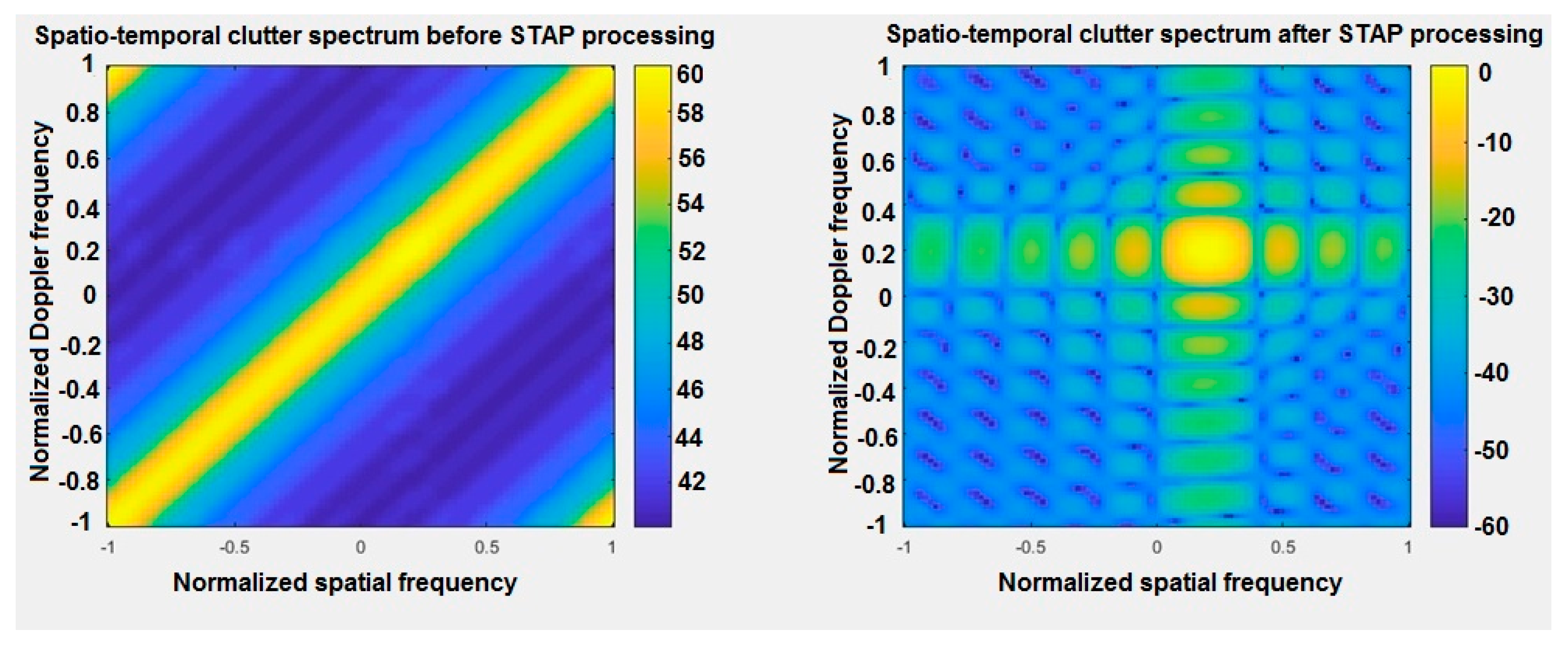
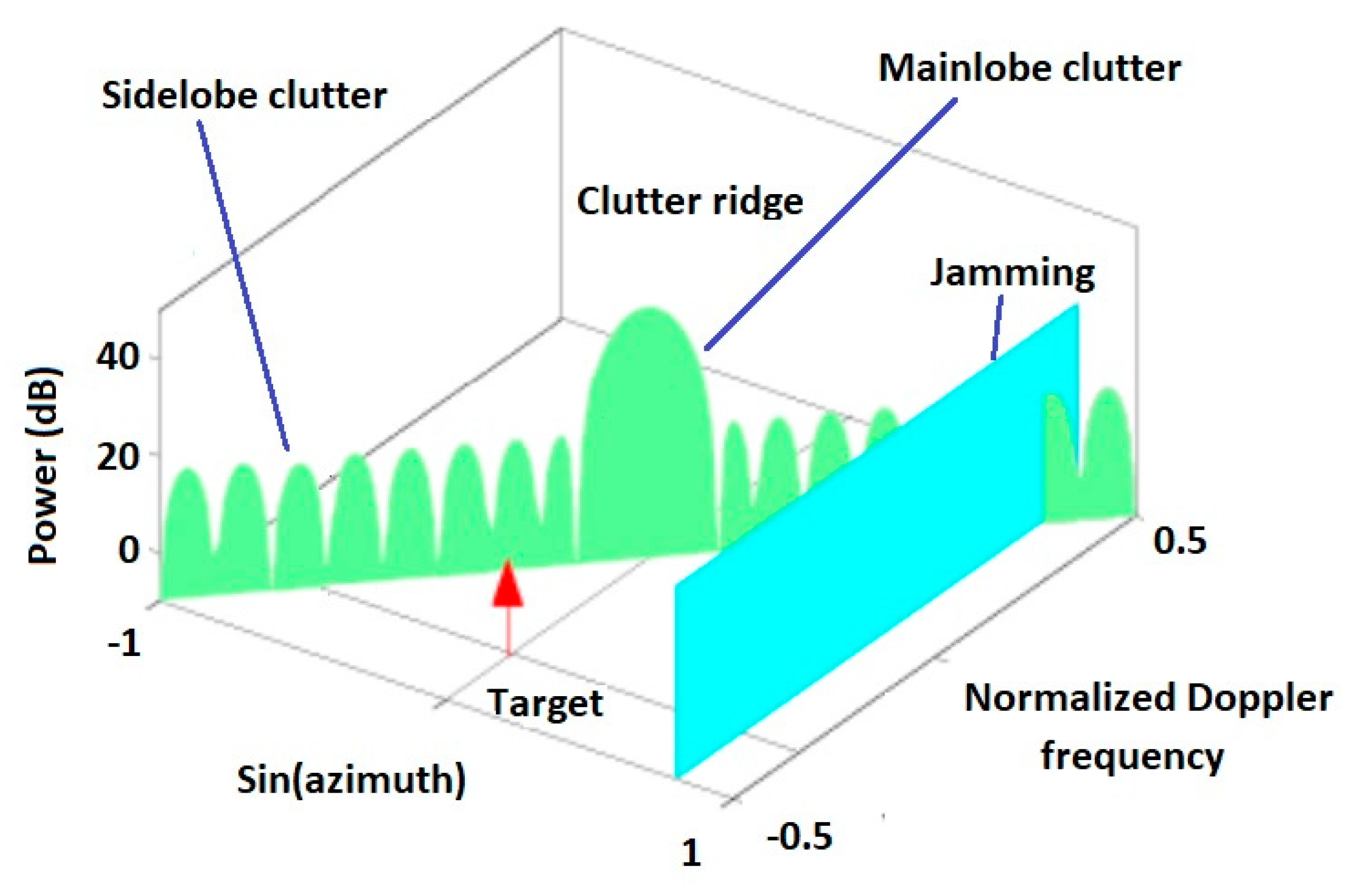
Figure 2 shows space-time spectrum of clutter before and after STAP processing in 2D charts. It shows the values of signals received by the MIMO radar array on the space-time plane. On the left chart, a yellow area is drawn along the diagonal of the graph. According to the literature on the subject of such research, this represents the so-called clutter ridge, whose graphic interpretation is shown in the Figure 3. In the right chart, it can be seen that the algorithm correctly detected the target located at the intersection of two straight lines, for a normalized Doppler frequency of fdt = 0.2 and a normalized spatial frequency also of fst = 0.2, respectively.
The following figure graphically depicts the interpretations of the clutter ridge. Clutter ridge is a constant value for given radar and environment parameters and depends directly on the speed of movement of the flying platform and inversely on the distance between the antennas and the pulses repetition frequency.
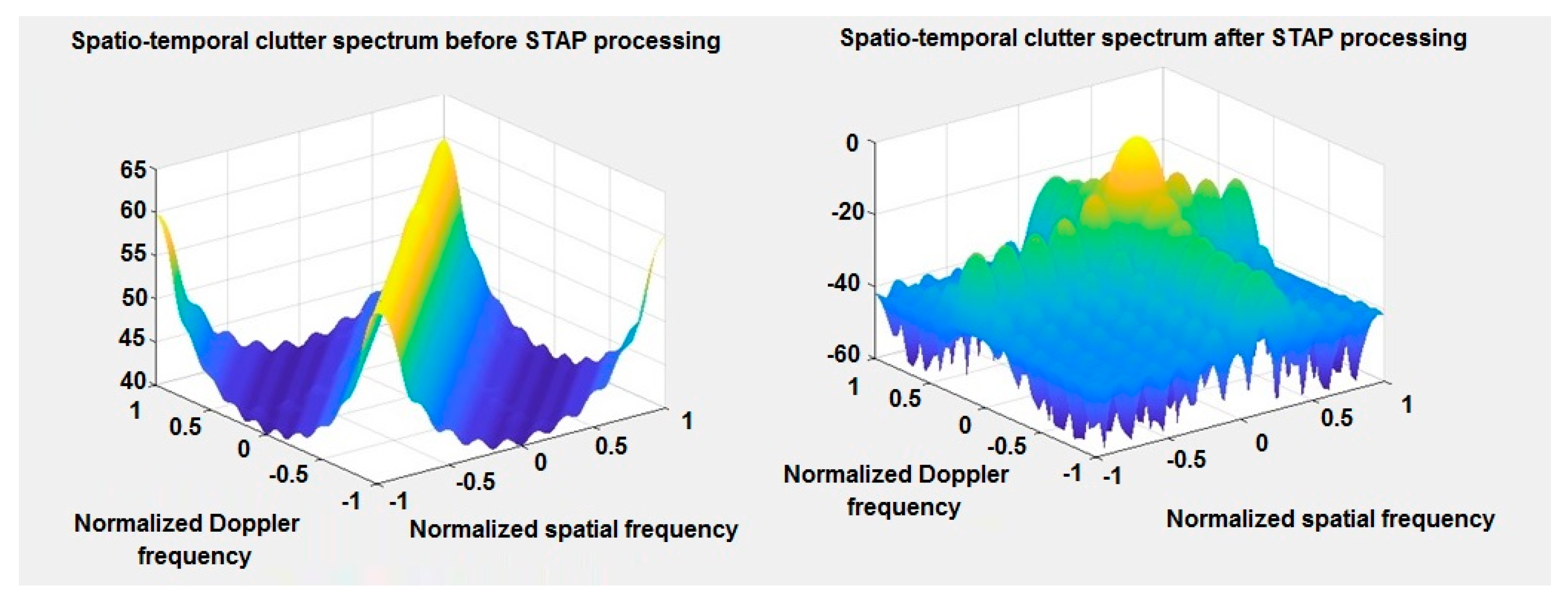
Figure 4 shows space-time spectrum of clutter before and after STAP processing in 3D chart. It is easy to see that clutter occurs in every distance cell. It is related to the movement of the flying platform and the non-zero value of the Doppler frequency shift between the platform and stationary field objects. The left chart shows the clutter ridge for simulation parameters. The proposed algorithm successfully removed the simulated clutter and enabled the detection of an object obscured by clutter.
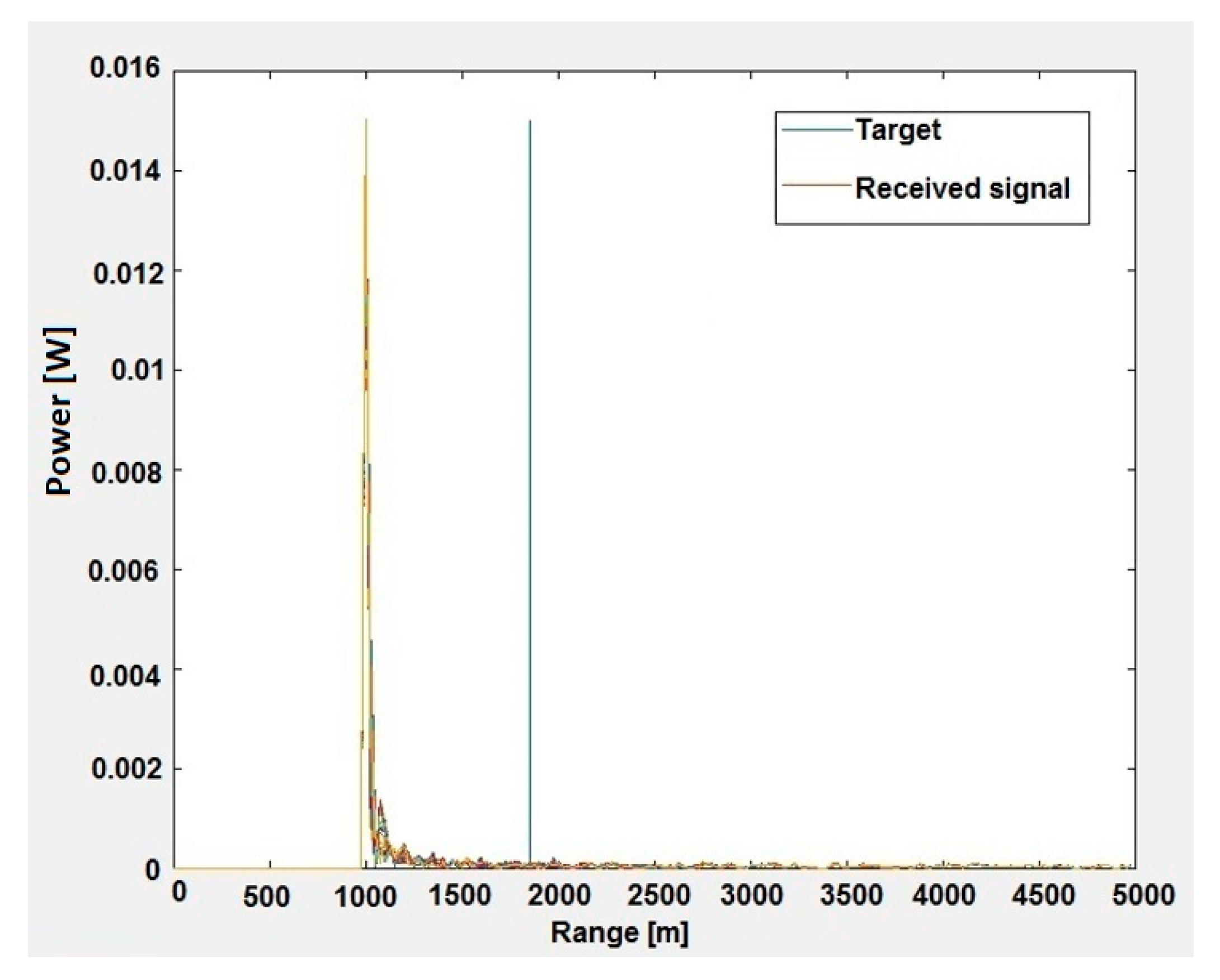
A very important feature of the proposed STAP algorithm is the precise detection of objects. Another simulation was carried out for the same parameters. Figure 5 shows the values of signals received by the MIMO radar array as a function of range after the first pulse. At this stage, the received signals form a data cube of three dimensions (number of distance cells × number of pulses × number of antennas), which has not yet been processed by the newly developed STAP algorithm. Therefore, the radar cannot indicate the location of the object against the background of strong clutter. As you can easily see, the radar erroneously indicates that the object is 1000 m away from the radar.
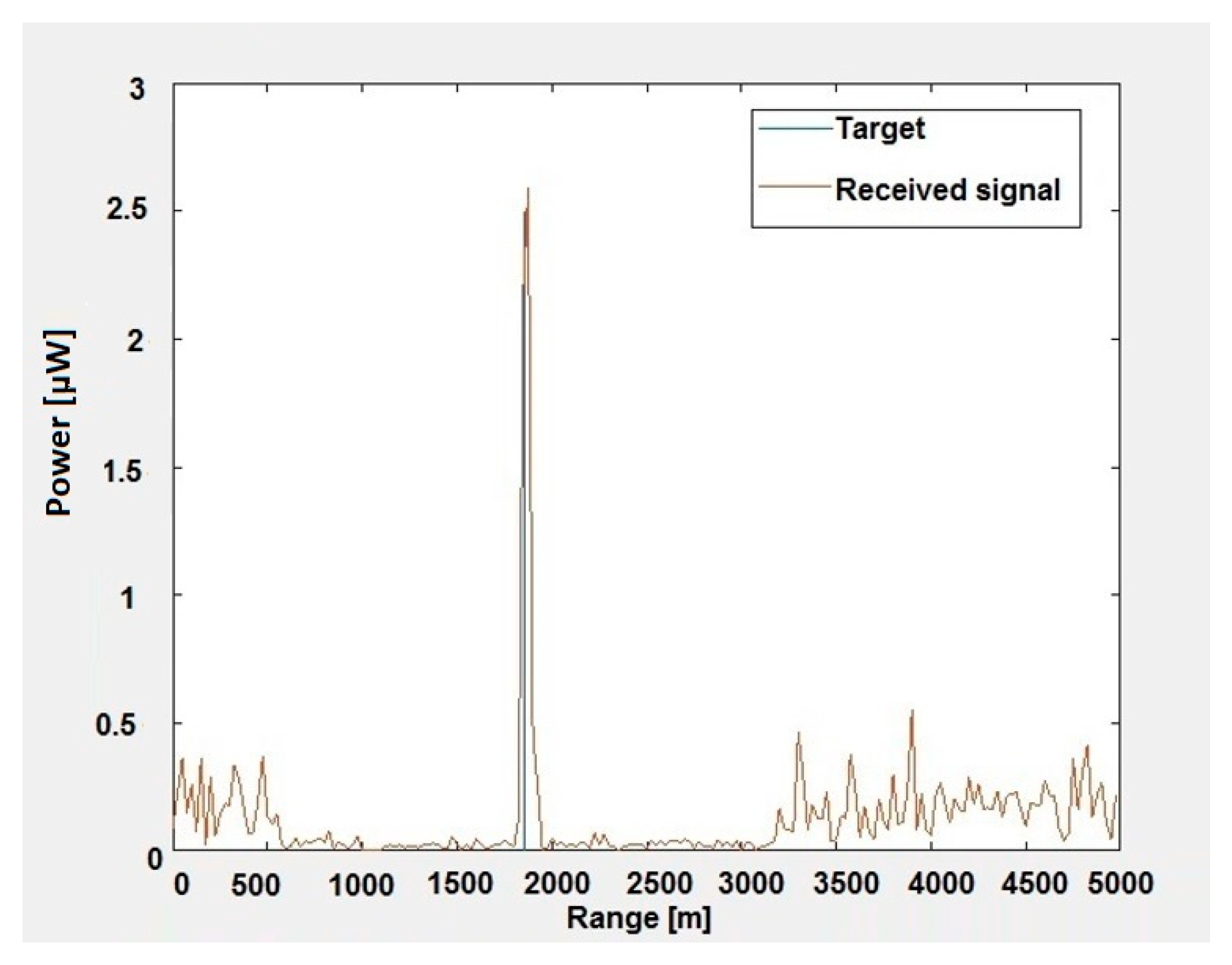
Figure 6 shows the values of signals received by the MIMO radar array as a function of range after the first pulse. However, this time, the raw data were subjected to STAP processing by implementing the proposed STAP algorithm in the MATLAB environment. As you can easily see, the radar correctly indicates that the object is approximately 1900 m from the radar in a straight line.
6.2. Performance of Clutter Suppression
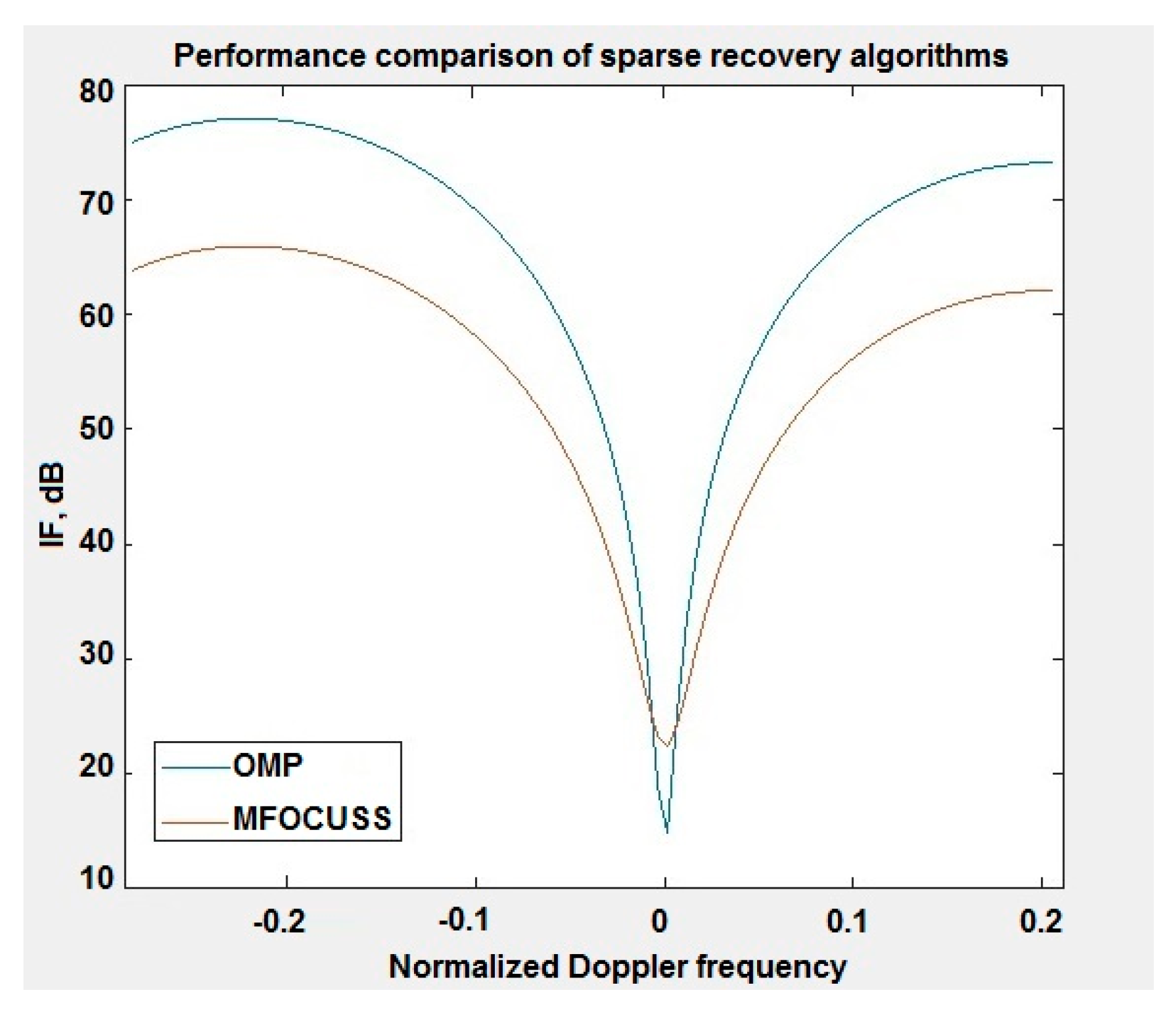
Next, we compare and analyse the proposed STAP method in terms of clutter suppression performance based on the improvement factor IF, where IF is defined as the signal-to-noise ratio at the output to the signal-to-noise at the input of STAP processor [21].
Figure 7 shows the performances of clutter suppression for both of the sparse recovery algorithms used. Considering the practical implementation and the standard parameter set [22], for the OMP algorithm, better clutter suppression can be obtained compared to the same STAP processing but using the MFOCUSS algorithm. This is due to the fact that the indentation of the IF curve in Figure 5 is narrower and reaches higher values. The use of the MFOCUSS algorithm in STAP processing and its comparison with the methods described in articles [12,13] were the subject of publication consideration [19].
7. Conclusions
The paper presents a new STAP processing method for target detection in a heterogeneous and non-stationary environment. The new method has been experimentally verified. The case of using MIMO radar on a flying platform was modelled and the OMP algorithm was used to determine the spatio-temporal clutter spectrum. The new method uses a single snapshot of the MIMO radar data cube radar. This allowed us to solve the problem of access to a large number of training cells and the non-stationary clutter in a heterogeneous environment, which in total significantly hinders the use of STAP processing in practice.
The paper alleges the analysis of the joint sparsity of echo data in the time and space domains in the MIMO on-board radar. Theoretical analysis and simulation results show that the proposed method can obtain a more accurate spatio-temporal spectrum estimation and have better clutter suppression performance than existing STAP methods using joint sparsity echo data and the MFOCUSS algorithm [12,13,19]. In addition, the OMP method is less computationally complex than the MFOCUSS method.
In summary, it has been proven in this paper that it is possible to estimate the STAP clutter covariance matrix by using the MIMO radar geometry model and OMP algorithm. The authors are aware of the lack of practical verification of the proposed algorithm; however, this will be targeted by future research.
Author Contributions
Methodology, A.Ś. and A.K.; software, A.Ś.; formal analysis, A.K.; investigation, A.Ś. and A.K.; writing—review and editing, A.Ś. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Application of M-FOCCUS Algorithm
The individual steps of the M-FOCCUS algorithm (u = 2, v = 1) to solve Equation (28) are as follows [19,20,21]:
- Initialization of the algorithm—setting initial variables. It was assumed that:where Y0,i, i = 1, 2, …, NsKd denotes ith row of Y0, Y0,i(j) denotes jth element of Y0,i, j = 1, 2, …, M.
- Calculation of the weight matrix W:while the other elements of the weight matrix are zeros. Wt denotes the t-th (t = 1, 2, …, tmax) iteration weight matrix W, tmax denotes maximum number of iterations and Ct−1 denotes the (t−1)-th iteration value of C.
- Iteration loop:where Yt and Ct represent t-th iteration value of Y and C respectively, Yt,i, i = 1, 2, …, NsKd is i-th row Yt, Yt,i(j) is jth element of Yt,i and (∙)ϯ denotes the matrix pseudo-inverse.
- Condition to stop iteration:If the convergence condition is met and the maximum number of iterations has been reached, the iteration is stopped, and the calculation result is 𝜰0 = Yt. Otherwise, return to step 2.
Appendix B
Application of OMP Algorithm
The orthogonal matching pursuit algorithm is a method of analysing signals that involves finding a representation of an input signal in a large set of arbitrarily selected functions. Searching such a set, called a dictionary, to find the optimal match is characterized by high computational complexity; it is called an NP-hard problem. In 1993, Mallat and Zhang proposed a sub-optimal, greedy iterative algorithm as a solution to the problem.
The main advantage of OMP is the possibility of using a redundant dictionary, which allows for very flexible parameterization of the structures contained in the signal. When decomposing, choose the base functions whose characteristics best match the characteristics of the signal being analysed. However, the dictionary can be composed freely. The choice of dictionary function is determined by the external knowledge of the decomposed signal.
The individual steps of the OMP algorithm to solve Equation (28) are as follows [21]:
- Initialization of the algorithm—setting initial variables. It was assumed that:where r0 indicates an approximation error, 𝛤0 denotes the selected set of dictionary atoms and 𝜰0 is the wanted spectrum.
- Iteration loop consists of eight consecutive steps:where 𝜙T indicates the transposition of a normalized dictionary 𝛹, p𝛤n is a new direction and d𝛤n is the given column vector of the dictionary 𝛹.The OMP algorithm in the first step selects from the dictionary 𝜙T the given atom 𝛤n best matched to the X vector, i.e., giving the largest value of the scalar product with the X vector. In each subsequent step, the atoms are analogously matched to the residue rn−1, remain after subtracting the result of the previous iteration, and the residue rn is determined. The atom is selected from the dictionary in each iteration step; it meets the obvious condition in = arg max | gin |.
- Condition to stop iteration:If the convergence condition is satisfied for the assumed ε, the iteration is stopped and the result of the calculation is 𝜰n𝛤n. Otherwise, return to step 2.
References
- Dong, R.; Zheng, B. Direct data domain STAP algorithm for airborne radar applications. In Proceedings of the 2001 CIE International Conference on Radar, Beijing, China, 15–18 October 2001. [Google Scholar]
- Sarkar, T.; Koh, J.; Adve, R.; Schneible, R.; Wicks, M.; Choi, S.; Salazar-Palma, M. A pragmatic approach to adaptive antennas. IEEE Antennas Propag. Mag. 2000, 42, 39–55. [Google Scholar] [CrossRef]
- Burintramart, S.; Sarkar, T.K.; Zhang, Y.; Wicks, M.C. Performance comparison between statistical-based and direct data domain STAPs. Digit. Signal Process. 2007, 17, 737–755. [Google Scholar] [CrossRef]
- Carlo, J.; Sarkar, T.; Wicks, M. A least squares multiple constraint direct data domain approach for STAP. In Proceedings of the 2003 IEEE Radar Conference, Huntsville, AL, USA, 8 May 2003; pp. 431–438. [Google Scholar] [CrossRef]
- Li, M.; Sun, G.; He, Z. Direct Data Domain STAP Based on Atomic Norm Minimization. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Adve, R.S.; Hale, T.B.; Wicks, M.C. A two stage hybrid space-time adaptive processing algorithm. In Proceedings of the 1999 IEEE Radar Conference. Radar into the Next Millennium, Waltham, MA, USA, 22 April 1999; pp. 279–284. [Google Scholar]
- Choi, W.; Sarkar, T.; Wang, H.; Mokole, E.L. Adaptive processing using real weights based on a direct data domain least squares approach. IEEE Trans. Antennas Propag. 2006, 54, 182–191. [Google Scholar] [CrossRef]
- Sun, K.; Meng, H.; Wang, Y.; Wang, X. Direct data domain STAP using sparse representation of clutter spectrum. Signal Process. 2011, 91, 2222–2236. [Google Scholar] [CrossRef] [Green Version]
- Jeon, H.; Chung, Y.; Chung, W.; Kim, J.; Yang, H. Clutter covariance matrix estimation using weight vectors in knowledge-aided STAP. Electron. Lett. 2017, 53, 560–562. [Google Scholar] [CrossRef]
- Peng, H.; Sun, Y.; Yang, X.; Yang, J. Robust knowledge-aided sparse recovery STAP method for non-homogeneity clutter suppression. J. Eng. 2019, 2019, 6373–6376. [Google Scholar] [CrossRef]
- Sen, S. Low-Rank Matrix Decomposition and Spatio-Temporal Sparse Recovery for STAP Radar. IEEE J. Sel. Top. Signal Process. 2015, 9, 1510–1523. [Google Scholar] [CrossRef]
- Ma, Z.; Liu, Y.; Meng, H.; Wang, X. Jointly sparse recovery of multiple snapshots in STAP. In Proceedings of the 2013 IEEE Radar Conference (RadarCon13), Ottawa, ON, Canada, 29 April–3 May 2013; pp. 1–4. [Google Scholar] [CrossRef]
- Yang, Z.; Li, X.; Wang, H.; Fa, R. Knowledge-aided STAP with sparse-recovery by exploiting spatio-temporal sparsity. IET Signal Process. 2016, 10, 150–161. [Google Scholar] [CrossRef]
- Duan, K.; Wang, Z.; Xie, W.; Chen, H.; Wang, Y. Sparsity-based STAP algorithm with multiple measurement vectors via sparse Bayesian learning strategy for airborne radar. IET Signal Process. 2017, 11, 544–553. [Google Scholar] [CrossRef]
- Guo, Y.; Liao, G.; Feng, W. Sparse Representation Based Algorithm for Airborne Radar in Beam-Space Post-Doppler Reduced-Dimension Space-Time Adaptive Processing. IEEE Access 2017, 5, 5896–5903. [Google Scholar] [CrossRef]
- Zhang, W.; An, R.; He, N.; He, Z.; Li, H. Reduced Dimension STAP Based on Sparse Recovery in Heterogeneous Clutter Environments. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 785–795. [Google Scholar] [CrossRef]
- Ward, J. Space-time adaptive processing for airborne radar. In Proceedings of the IEE Colloquium on Space-Time Adaptive Processing, London, UK, 6 April 1998. [Google Scholar] [CrossRef]
- Feng, W.; Zhang, Y. MMV-JSR based STAP method using MIMO radar. IEICE Commun. Express 2016, 5, 163–168. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Huo, X. Theoretical Results on Sparse Representations of Multiple-Measurement Vectors. IEEE Trans. Signal Process. 2006, 54, 4634–4643. [Google Scholar] [CrossRef] [Green Version]
- Knee, P. Sparse Representations for Radar with MATLAB®Examples. Synth. Lect. Algorithms Softw. Eng. 2012, 4, 1–85. [Google Scholar] [CrossRef]
- Le Caillec, J.-M.; Gorski, T.; Sicot, G.; Kawalec, A. Theoretical Performance of Space-Time Adaptive Processing for Ship Detection by High-Frequency Surface Wave Radars. IEEE J. Ocean. Eng. 2018, 43, 238–257. [Google Scholar] [CrossRef]
- Klemm, R. Principles of Space-Time Adaptive Processing, 3rd ed.; Institution of Engineering and Technology: London, UK, 2006. [Google Scholar]
Figure 1.
Geometry of the MIMO radar system under consideration.

Figure 2.
Space-time spectrum of clutter before and after STAP processing—2D charts.

Figure 3.
Clutter ridge in angular-Doppler plane.

Figure 4.
Space-time spectrum of clutter before and after STAP processing—3D charts.

Figure 5.
Values of signals received by the MIMO radar array as a function of range before STAP processing.
Figure 5.
Values of signals received by the MIMO radar array as a function of range before STAP processing.

Figure 6.
Values of signals received by the MIMO radar array as a function of range after STAP processing.
Figure 6.
Values of signals received by the MIMO radar array as a function of range after STAP processing.

Figure 7.
Performance comparison of sparse recovery algorithms.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Parameters.
| Parameter | Value |
|---|---|
| number of transmitters of MIMO radar | 18 |
| number of receivers of MIMO radar | 8 |
| number of pulses | 8 |
| wavelength | 0.23 m |
| distance between transmitters | 0.115 m |
| distance between receivers | 0.115 m |
| distance between elements of the antenna array | 0.115 m |
| flight altitude of the platform | 5 km |
| velocity of the platform | 250 m/s |
| pulse repetition frequency | 4347.8 Hz |
| normalized Doppler frequency of target | 0.2 |
| normalized spatial frequency of target | 0.2 |
| clutter-to-noise ratio | 30 dB |
| signal-to-noise ratio | 10 dB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ślesicka, A.; Kawalec, A. An Application of the Orthogonal Matching Pursuit Algorithm in Space-Time Adaptive Processing. Sensors 2020, 20, 3468. https://0-doi-org.brum.beds.ac.uk/10.3390/s20123468
AMA Style
Ślesicka A, Kawalec A. An Application of the Orthogonal Matching Pursuit Algorithm in Space-Time Adaptive Processing. Sensors. 2020; 20(12):3468. https://0-doi-org.brum.beds.ac.uk/10.3390/s20123468
Chicago/Turabian StyleŚlesicka, Anna, and Adam Kawalec. 2020. "An Application of the Orthogonal Matching Pursuit Algorithm in Space-Time Adaptive Processing" Sensors 20, no. 12: 3468. https://0-doi-org.brum.beds.ac.uk/10.3390/s20123468
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.