Fault Diagnosis of Rotary Machines Using Deep Convolutional Neural Network with Wide Three Axis Vibration Signal Input


Abstract
:1. Introduction
- (1)
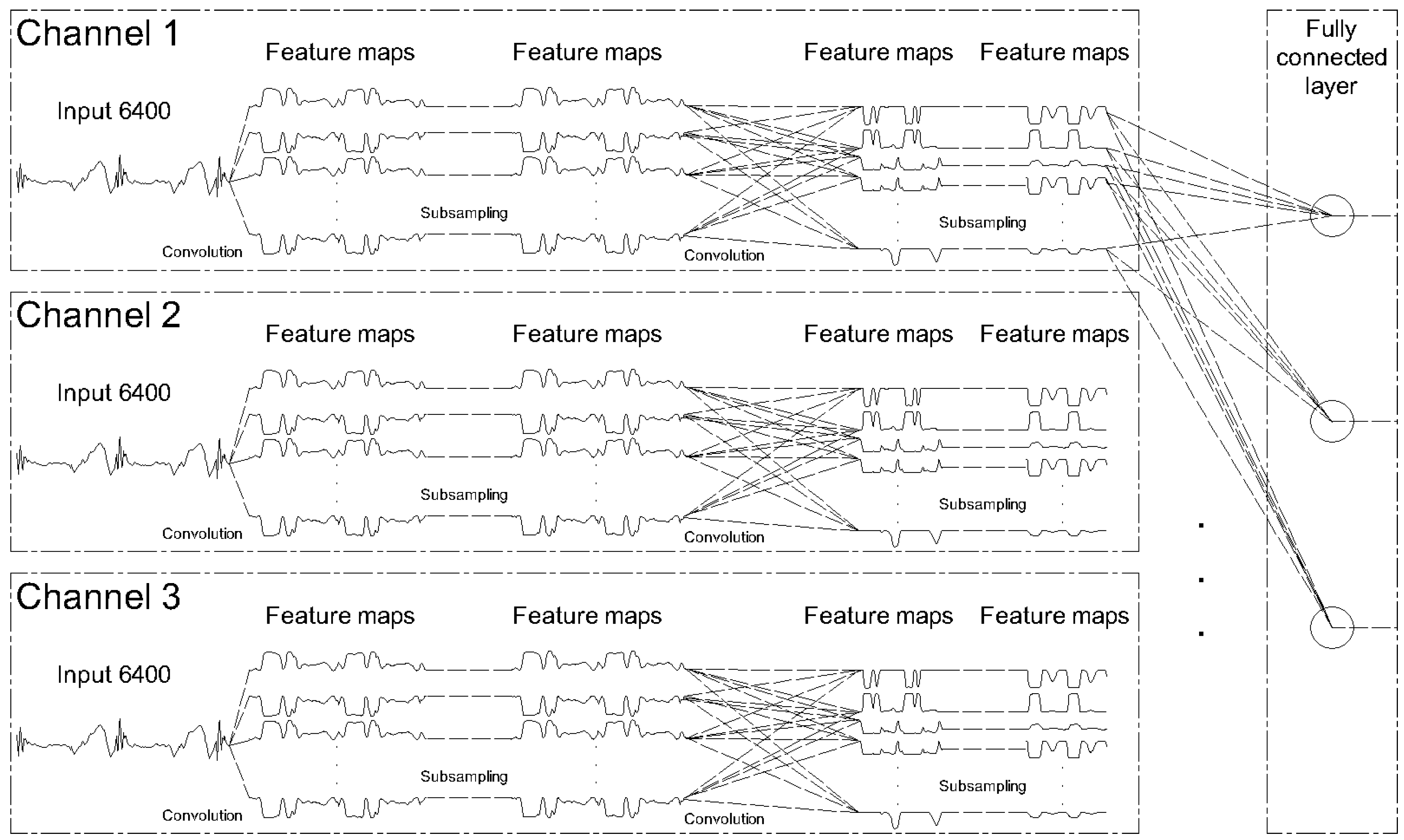
- We propose a multi-channels deep convolutional neural network (MC-DCNN) configuration for rotary machinery state classification, which is used to fuse feature extraction and learning phases of the raw accelerometer data thus eliminating necessity expert knowledge in vibration signal preprocessing. In the first phase of the learning, convolutional layers are used to learn features that are then used as inputs in fully connected layer of the MC-DCNN. Because CNN can learn and then recognize patterns of data that are characteristic for labeled input, wide 1D accelerometer data matrix with dimensions 6400 × 1 × 3 is used as input for convolutional neural network training.
- (2)
- Presented technique is tested on laboratory data in a way that models are trained with different combinations of hyperparameters using grid-search. The comparison of the trained model shows that different hyperparameters combinations has great impact on model performance.
- (3)
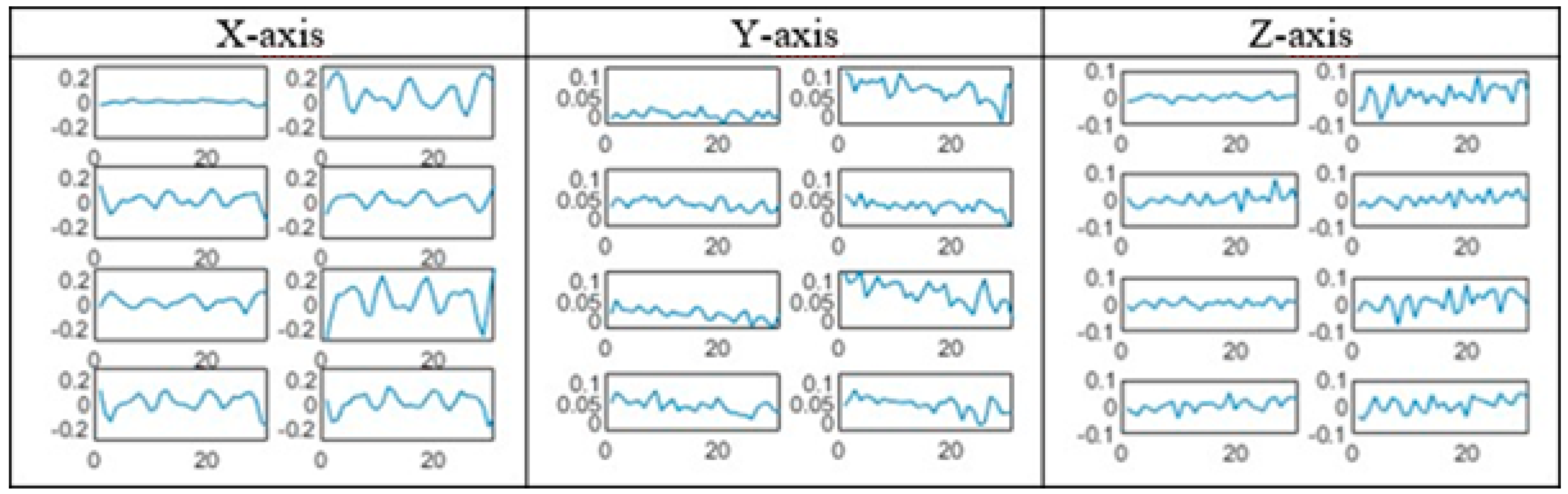
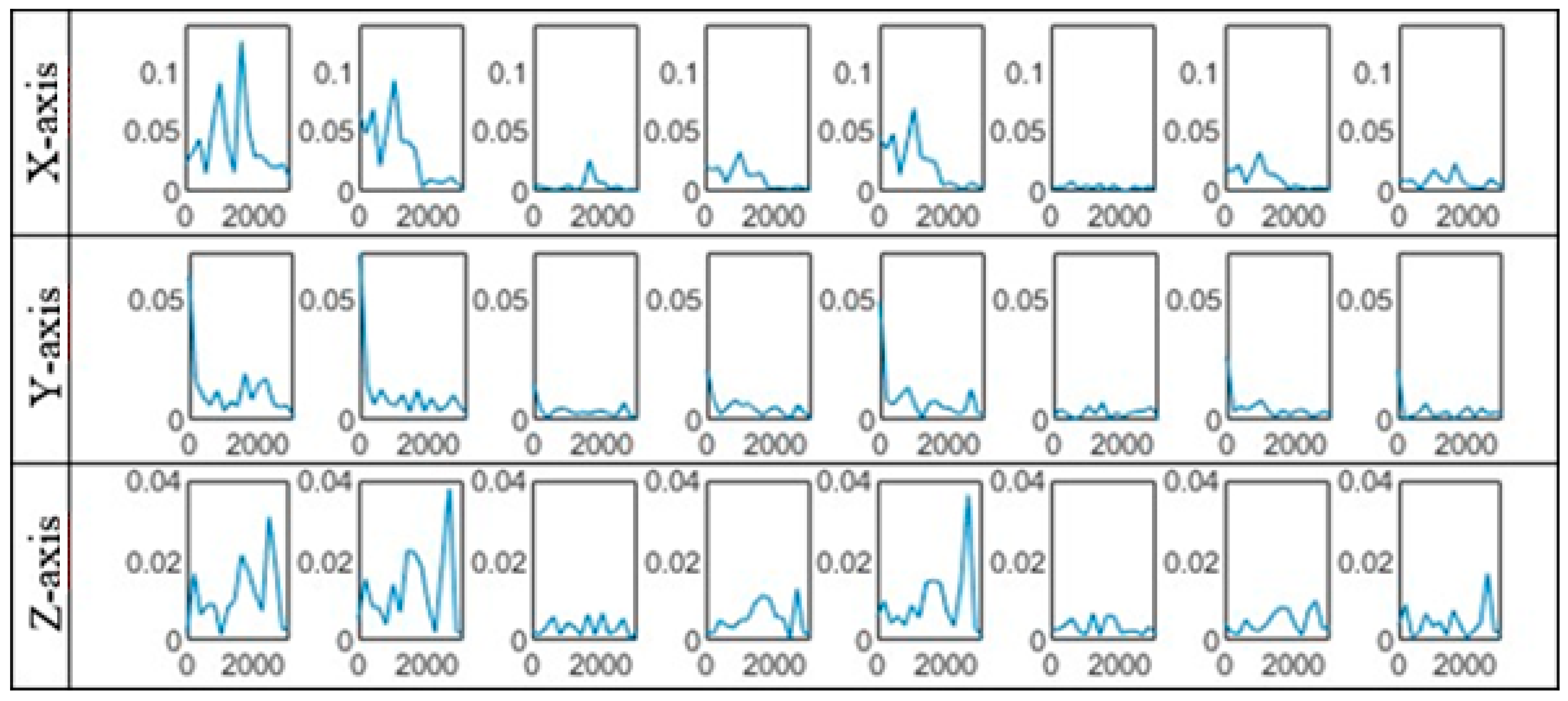
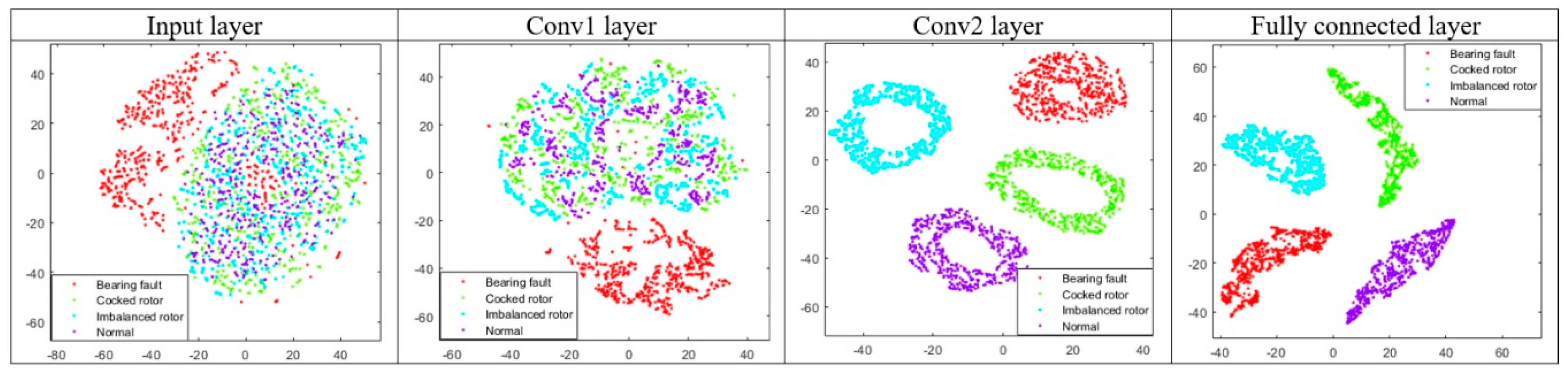
- Since convolutional neural networks (CNN) are generally considered as black-boxes, we try to find a physical interpretation of convolutional layers automatic feature extraction with converting learned features in frequency domain by using fast Fourier transform algorithm. By using such an interpretation, it can be seen in which frequency range features are learned for each accelerometer axis. Additionally, we performed activations dimensionality reduction with t-SNE for better understanding how features are learned throughout network.
2. Convolutional Neural Network
3. Architecture of CNN for Raw Signal Data Input
4. Mini-Batch Stochastic Gradient Descent with Momentum-Based Learning
5. Experimental Setup
6. Description
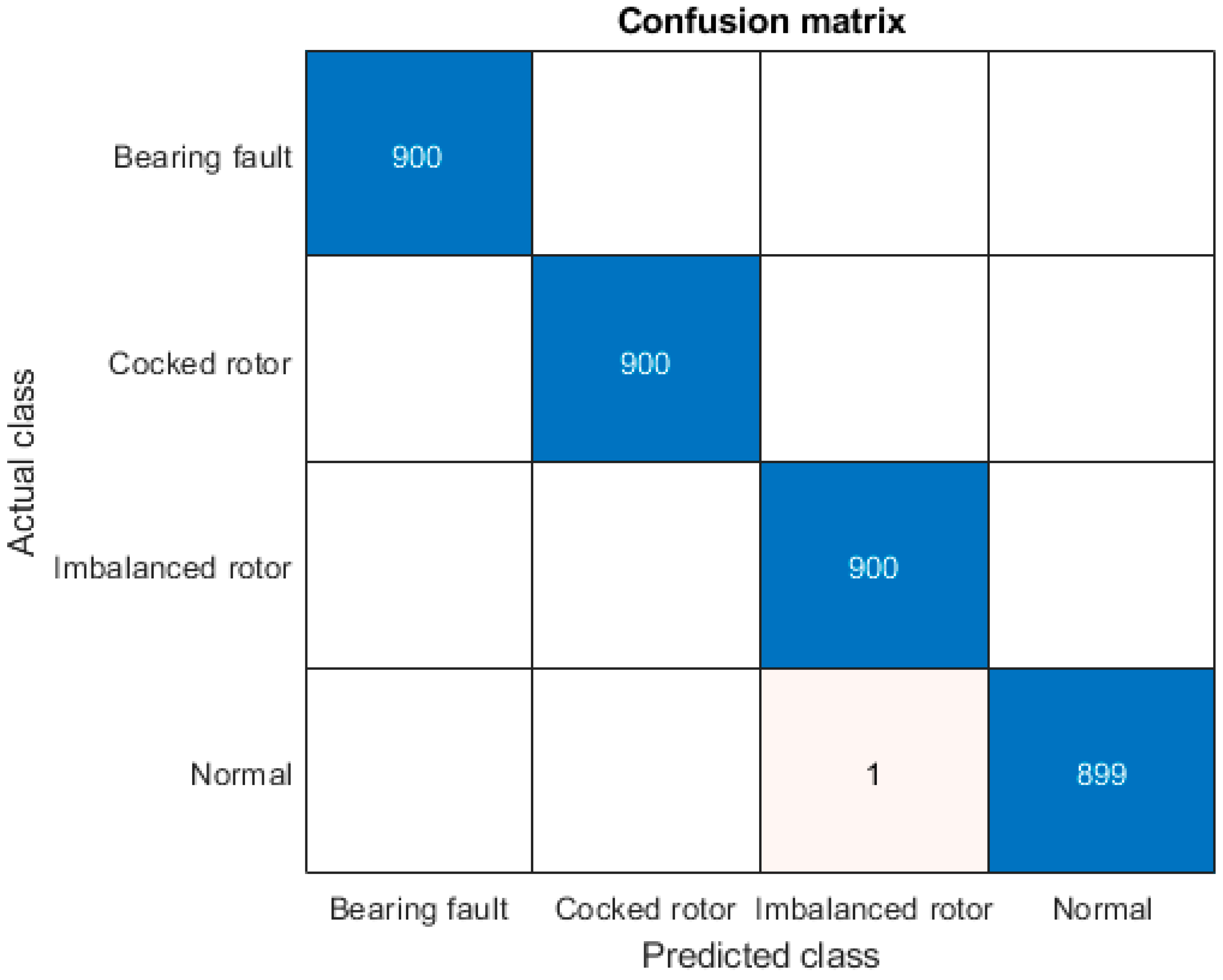
7. Results
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Verma, N.; Subramanian, T.S.S. Cost benefit analysis of intelligent condition based maintenance of rotating machinery. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications, Singapore, 18–20 July 2012; pp. 1390–1394. [Google Scholar]
- Zhang, Z. Data Mining Approaches for Intelligent Condition-based Maintenance. Available online: https://ntnuopen.ntnu.no/ntnu-xmlui/handle/11250/240971 (accessed on 24 May 2020).
- Shao, S.; Sun, W.; Wang, P.; Gao, R.X.; Yan, R. Learning features from vibration signals for induction motor fault diagnosis. In Proceedings of the 2016 International Symposium on Flexible Automation (ISFA), Cleveland, OH, USA, 1–3 August 2016; pp. 71–76. [Google Scholar]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154–170. [Google Scholar] [CrossRef]
- Jardine, A.K.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Khanam, S.; Tandon, N.; Dutt, J.K. Fault size estimation in the outer race of ball bearing using discrete wavelet transform of the vibration signal. Procedia Technol. 2014, 14, 12–19. [Google Scholar] [CrossRef] [Green Version]
- Shen, C.; Wang, D.; Kong, F.; Tse, P.W. Fault diagnosis of rotating machinery based on the statistical parameters of wavelet packet paving and a generic support vector regressive classifier. Measurement 2013, 46, 1551–1564. [Google Scholar] [CrossRef]
- Sinha, J.K.; Elbhbah, K. A future possibility of vibration based condition monitoring of rotating machines. Mech. Syst. Signal Process. 2013, 34, 231–240. [Google Scholar] [CrossRef]
- Walker, R.; Perinpanayagam, S.; Jennions, I.K. Rotordynamic faults: Recent advances in diagnosis and prognosis. Int. J. Rotating Mach. 2013, 2013, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Omoregbee, H.O.; Heyns, P.S. Fault classification of low-speed bearings based on support vector machine for regression and genetic algorithms using acoustic emission. J. Vib. Eng. Technol. 2019, 7, 455–464. [Google Scholar] [CrossRef]
- Widodo, A.; Kim, E.Y.; Son, J.D.; Tan, Y.B.S.; Gu, A.; Choi, D.S.; Mathew, B.K.J. Fault diagnosis of low speed bearing based on relevance vector machine and support vector machine. Expert Syst. Appl. 2009, 36, 7252–7261. [Google Scholar] [CrossRef]
- Cao, S.Q.; Ma, X.; Zhang, Y.; Luo, L.; Yi, F. A fault diagnosis method based on semi-supervised fuzzy c-means cluster analysis. Int. J. Cybern. Inform. 2015, 4, 281–289. [Google Scholar] [CrossRef]
- Hwang, Y.R.; Jen, K.K.; Shen, Y.T. Application of cepstrum and neural network to bearing fault detection. J. Mech. Sci. Technol. 2009, 23, 2730–2737. [Google Scholar] [CrossRef]
- Pan, Y.; Er, M.J.; Li, X.; Yu, H.; Gouriveau, R. Machine health condition prediction via online dynamic fuzzy neural networks. Eng. Appl. Artif. Intell. 2014, 35, 105–113. [Google Scholar] [CrossRef]
- Zurita-Millán, D.; Delgado-Prieto, M.; Saucedo-Dorantes, J.J.; Cariño-Corrales, J.A.; Osornio-Rios, R.A.; Ortega-Redondo, J.A.; Romero-Troncoso, R.D.J. Vibration signal forecasting on rotating machinery by means of signal decomposition and neurofuzzy modeling. Shock Vib. 2016, 2016, 1–13. [Google Scholar] [CrossRef]
- Chan, T.H.; Jia, K.; Gao, S.; Lu, J.; Zeng, Z.; Ma, Y. PCANet: A simple deep learning baseline for image classification? IEEE Tran. Image Process. 2015, 24, 5017–5032. [Google Scholar] [CrossRef] [Green Version]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NE, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Huang, P.S.; Kim, M.; Hasegawa-Johnson, M.; Smaragdis, P. Deep learning for monaural speech separation. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 1562–1566. [Google Scholar]
- Noda, K.; Yamaguchi, Y.; Nakadai, K.; Okuno, H.G.; Ogata, T. Audio-visual speech recognition using deep learning. Appl. Intell. 2015, 42, 722–737. [Google Scholar] [CrossRef] [Green Version]
- Cruz-Roa, A.A.; Ovalle, J.E.A.; Madabhushi, A.; Osorio, F.A.G. A Deep Learning Architecture for Image Representation, Visual Interpretability and Automated Basal-Cell Carcinoma Cancer Detection. Advanced Information Systems Engineering; Springer: Berlin/Heidelberg, Germany, 2013; pp. 403–410. [Google Scholar]
- Litjens, G.; Kooi, T.; Bejnordi, B.E.; Setio, A.A.A.; Ciompi, F.; Ghafoorian, M.; van der Laak, J.A.; van Ginneken, B.; Sánchez, C.I. A survey on deep learning in medical image analysis. Med. Image Anal. 2017, 42, 60–88. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmidhuber, J. Deep learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lecun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-time motor fault detection by 1-D convolutional neural networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; de Walle, R.V.; Hoecke, S.V. Convolutional Neural Network based fault detection for rotating machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Do, V.T.; Chong, U.P. Signal model-based fault detection and diagnosis for induction motors using features of vibration signal in two-dimension domain. Stroj. Vest. J. Mech. Eng. 2011, 57, 655–666. [Google Scholar] [CrossRef]
- Wen, L.; Li, X.; Gao, L.; Zhang, Y. A New Convolutional Neural Network-Based Data-Driven Fault Diagnosis Method. IEEE Transactions on Industrial Electronics 2018, 65, 5990–5998. [Google Scholar] [CrossRef]
- Shaheryar, A.; Yin, X.C.; Yousuf, W. robust feature extraction on vibration data under deep-learning framework: An application for fault identification in rotary machines. Int. J. Comput. Appl. 2017, 167, 37–45. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2018, 53, 42–50. [Google Scholar] [CrossRef]
- Zhang, L. Big Data Analytics for Fault Detection and its Application in Maintenance. Available online: http://ltu.diva-portal.org/smash/record.jsf?pid=diva2%3A1046794&dswid=136 (accessed on 24 May 2020).
- Li, S.; Liu, G.; Tang, X.; Lu, J.; Hu, J. An ensemble deep convolutional neural network model with improved d-s evidence fusion for bearing fault diagnosis. Sensors 2017, 17, 1729. [Google Scholar] [CrossRef] [Green Version]
- Kiranyaz, S.; Ince, T.; Gabbouj, M. Real-Time Patient-Specific ECG Classification by 1-D Convolutional Neural Networks. IEEE Trans. Biomed. Eng. 2016, 63, 664–675. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, Q.; Chen, E.; Ge, Y.; Zhao, J.L. Time Series Classification Using Multi-Channels Deep Convolutional Neural Networks; Springer International Publishing: Cham, Switzerland, 2014; pp. 298–310. [Google Scholar]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Bouvrie, J. Notes on Convolutional Neural Networks. 2006. Available online: http://cogprints.org/5869/1/cnn_tutorial.pdf (accessed on 24 May 2020).
- Lecun, Y.; Bottou, L.; Orr, G.B.; Müller, K.R. Efficient BackProp. In Neural Networks: Tricks of the Trade; Springer: New York, NY, USA 1998; pp. 9–50. [Google Scholar]
- Keskar, N.S.; Mudigere, D.; Nocedal, J.; Smelyanskiy, M.; Tang, P. On large-batch training for deep learning: generalization gap and sharp minima. arXiv 2017, arXiv:1609.04836. [Google Scholar]
- van der Maaten, L.; Hinton, G. Visualizing non-metric similarities in multiple maps. Mach. Learn. 2012, 87, 33–55. [Google Scholar] [CrossRef] [Green Version]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Condition | Description |
|---|---|---|
| 1 | Normal State | Machine is running without simulated fault |
| 2 | Debalanced Rotor | Machine is running with simulated fault of imbalance on main shaft |
| 3 | Cocked Rotor | Fault is simulated by adding cocked rotor on main shaft |
| 4 | Bearing Fault | Machine is running with bearing outer race fault |
| 12,000 datasets collected (76,800,000 data points) | 3000 samples collected in normal working condition | 2100 samples for training and validation during training (stochastic) |
| 900 samples for testing (stochastic) | ||
| 3000 samples collected in failure type 1: main shaft imbalance | 2100 samples for training and validation during training (stochastic) | |
| 900 samples for testing (stochastic) | ||
| 3000 samples collected in failure type 2: Cocked rotor | 2100 samples for training and validation during training (stochastic) | |
| 900 samples for testing (stochastic) | ||
| 3000 samples collected in failure type 3: Bearing fault | 2100 samples for training and validation during training (stochastic) | |
| 900 samples for testing (stochastic) |
| Layer | Size and Parameters |
|---|---|
| Input Layer | Input signal: [6400 × 1 × 3] |
| Convolutional Layer 1 | k1 kernels: [31 × 1 × 3] Layer output size: 6370 × 1 × k1 |
| Activation Layer 1 | Rectifier Linear Unit (ReLU) |
| Pooling Layer 1 | Max pooling [2 × 1] Layer size: 3185 × 1 × k1 Stride = 2 |
| Convolutional Layer 2 | k2 kernels [4 × 1 × 16] Layer size: 3182 × 1 × k2 |
| Activation Layer 2 | ReLU |
| Pooling Layer 2 | Max pooling [2 × 1] Layer size: 1591 × 1 × k2 Stride = 2 Fully connected layer |
| Fully Connected Layer | Size: 4 |
| Softmax | |
| Output Layer | Classes |
| CNN | Mean | StDev | Max | Min |
|---|---|---|---|---|
| CNN_8–16 | 99.86% | 0.0700% | 99.97% | 99.78% |
| CNN_8–32 | 99.81% | 0.0666% | 99.89% | 99.70% |
| CNN_8–48 | 99.80% | 0.0448% | 99.89% | 99.72% |
| CNN_16–16 | 99.86% | 0.0275% | 99.89% | 99.81% |
| CNN_16–32 | 99.84% | 0.0492% | 99.89% | 99.75% |
| CNN_16–48 | 99.87% | 0.0637% | 99.97% | 99.81% |
| CNN_24–16 | 99.86% | 0.1036% | 100.00% | 99.64% |
| CNN_24–32 | 99.86% | 0.0369% | 99.92% | 99.81% |
| CNN_24–48 | 99.93% | 0.0506% | 99.97% | 99.83% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kolar, D.; Lisjak, D.; Pająk, M.; Pavković, D. Fault Diagnosis of Rotary Machines Using Deep Convolutional Neural Network with Wide Three Axis Vibration Signal Input. Sensors 2020, 20, 4017. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144017
Kolar D, Lisjak D, Pająk M, Pavković D. Fault Diagnosis of Rotary Machines Using Deep Convolutional Neural Network with Wide Three Axis Vibration Signal Input. Sensors. 2020; 20(14):4017. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144017
Chicago/Turabian StyleKolar, Davor, Dragutin Lisjak, Michał Pająk, and Danijel Pavković. 2020. "Fault Diagnosis of Rotary Machines Using Deep Convolutional Neural Network with Wide Three Axis Vibration Signal Input" Sensors 20, no. 14: 4017. https://0-doi-org.brum.beds.ac.uk/10.3390/s20144017