Low-Complexity Design and Validation of Wireless Motion Sensor Node to Support Physiotherapy

 , , , ,
, , , ,  and
and
Abstract
:1. Introduction
2. Low Complexity Design of Wireless Motion Sensor Node
- Accuracy. The sensor node needs to be able to measure the human body movement with high precision. With proper calibration, it is possible to achieve a target accuracy of with a sampling frequency of 50 Hz [5].
- User-friendly. The device needs to be easy to use, capable of being operated by anyone, regardless of any medical or technical background. We opted to implement wireless charging to increase user-friendliness in operation and maintenance. The data is also wirelessly transferred to eliminate a mess of cables and thus providing freedom of movement.
- Autonomy. Users want to focus on the application rather than constantly thinking about charging the device. Therefore, an autonomy of at least 5 h and a charge time of less than 1.5 h is necessary.
- Affordable. To provide an appealing multi-purpose product for a wide range of applications, it needs to come at a low cost. That way, we want to reach a wide audience, both professionals as individuals.
2.1. Sensors
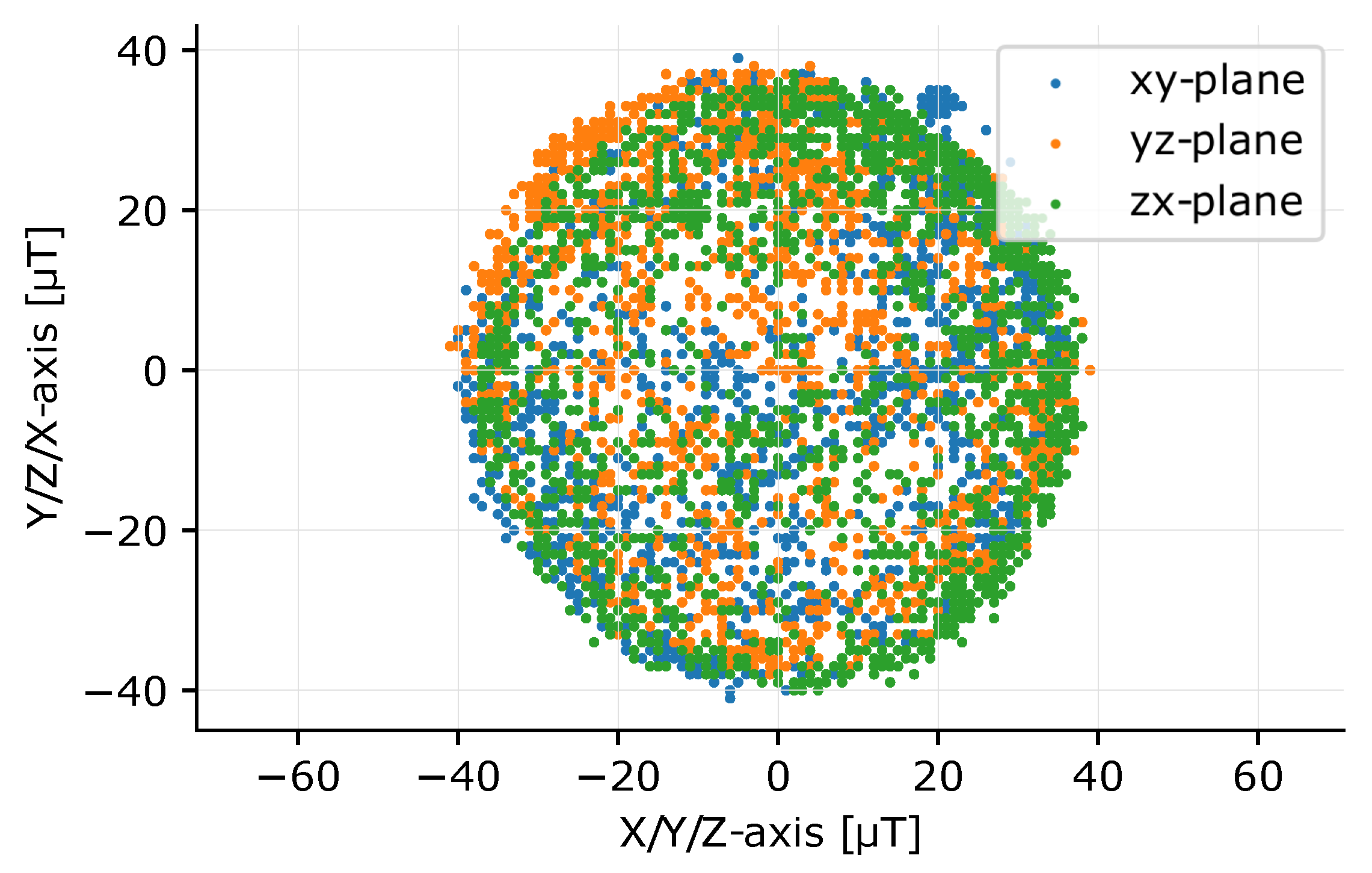
2.2. Calibration
2.3. Wireless Connectivity
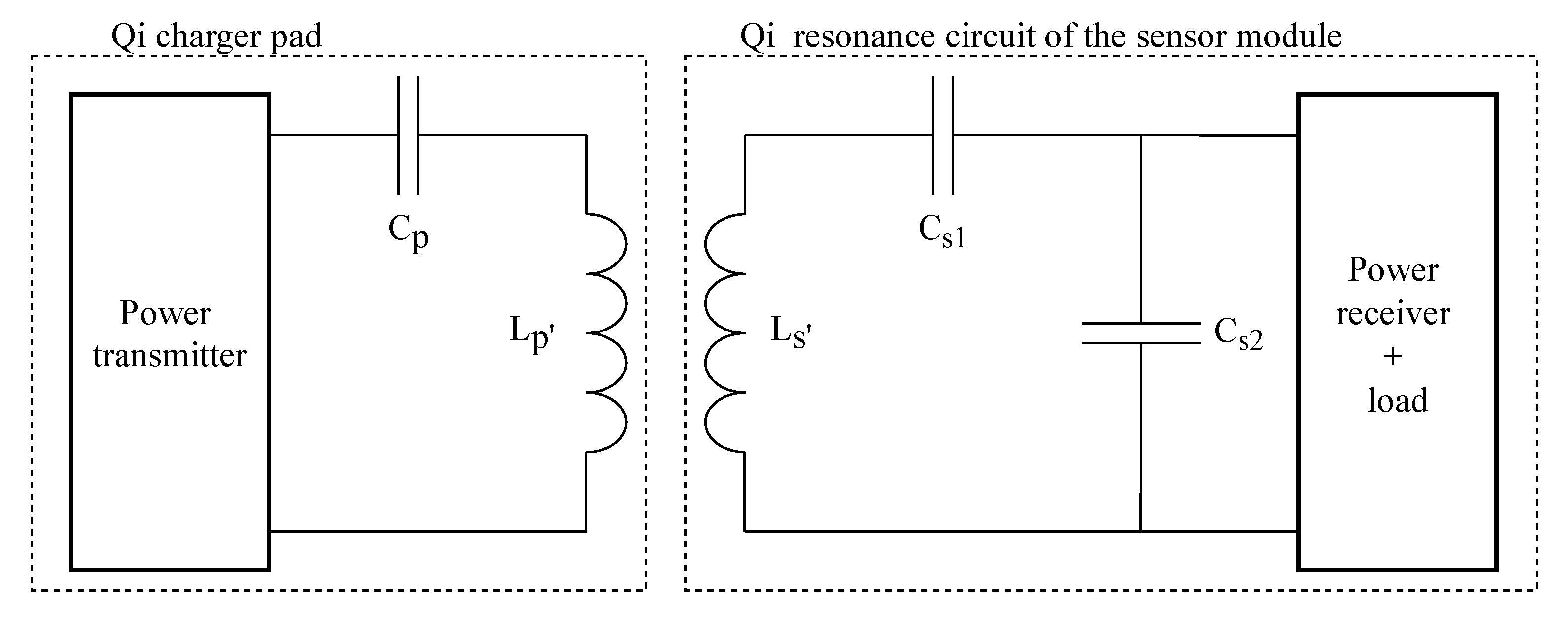
2.4. Wireless Charging
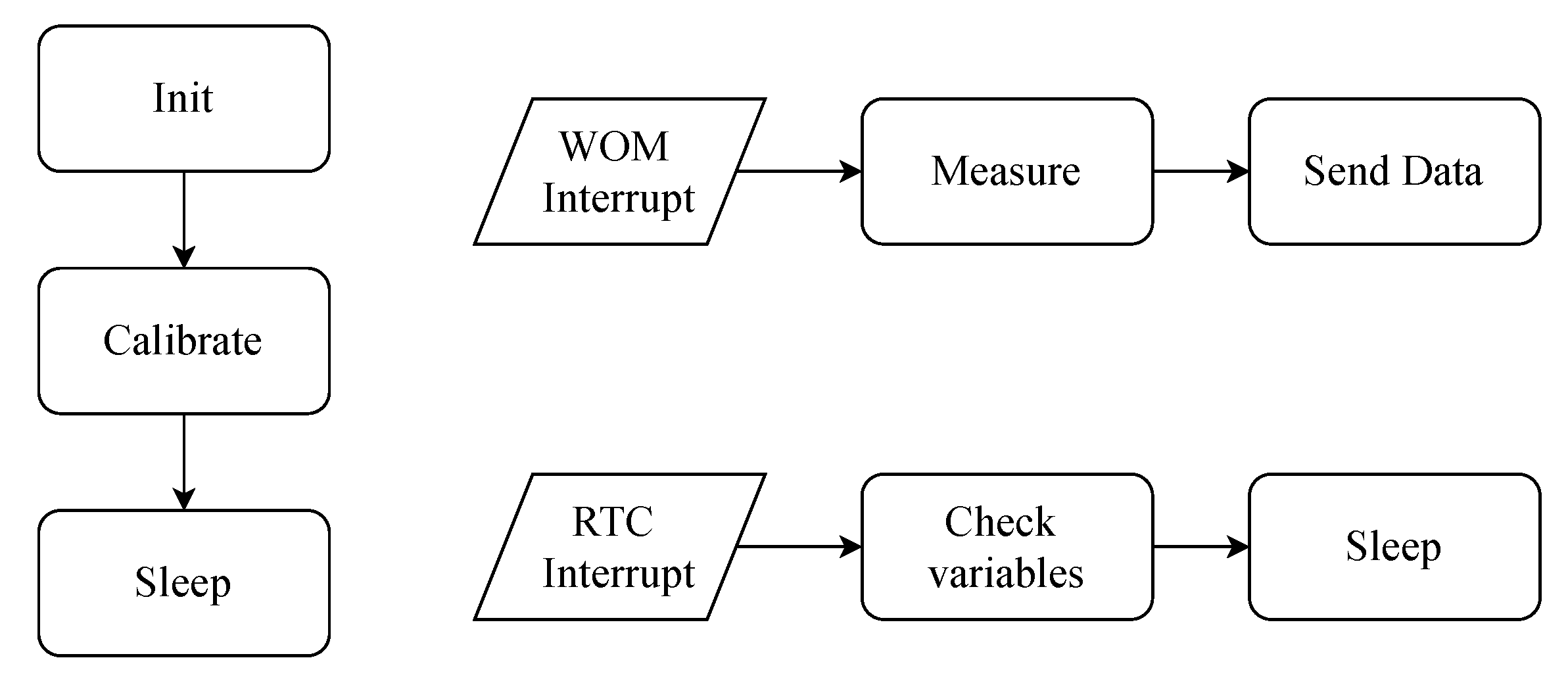
2.5. Optimization for Low Energy
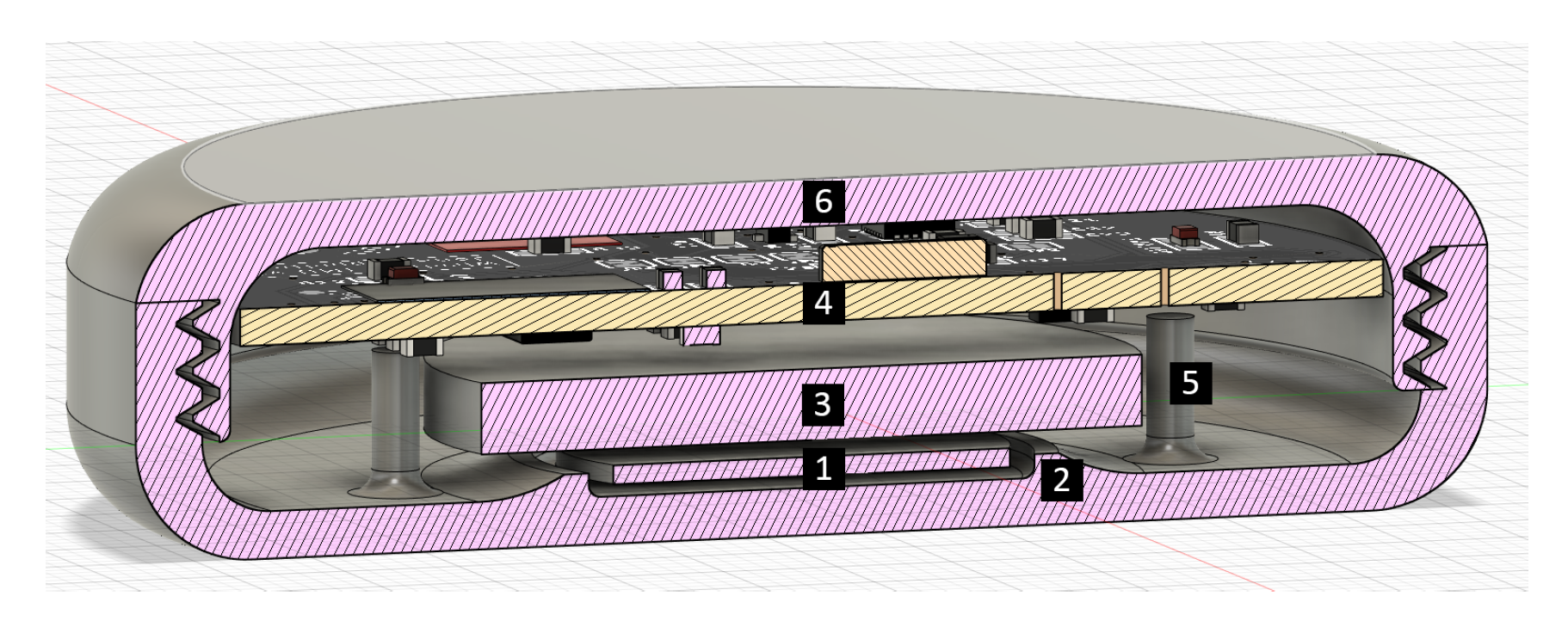
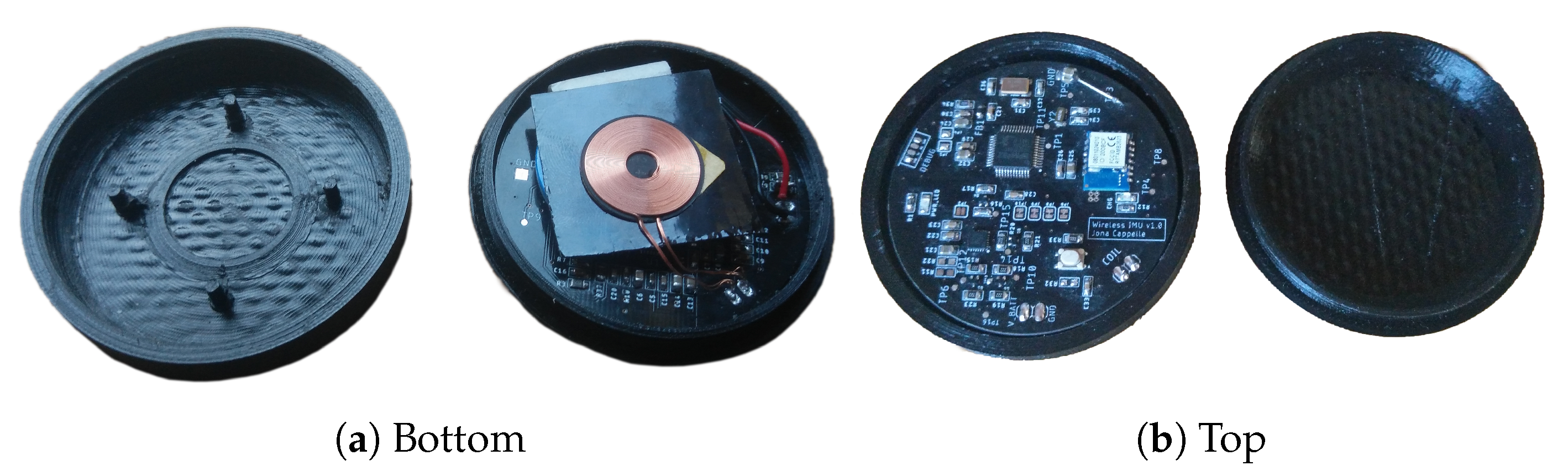
2.6. Prototype
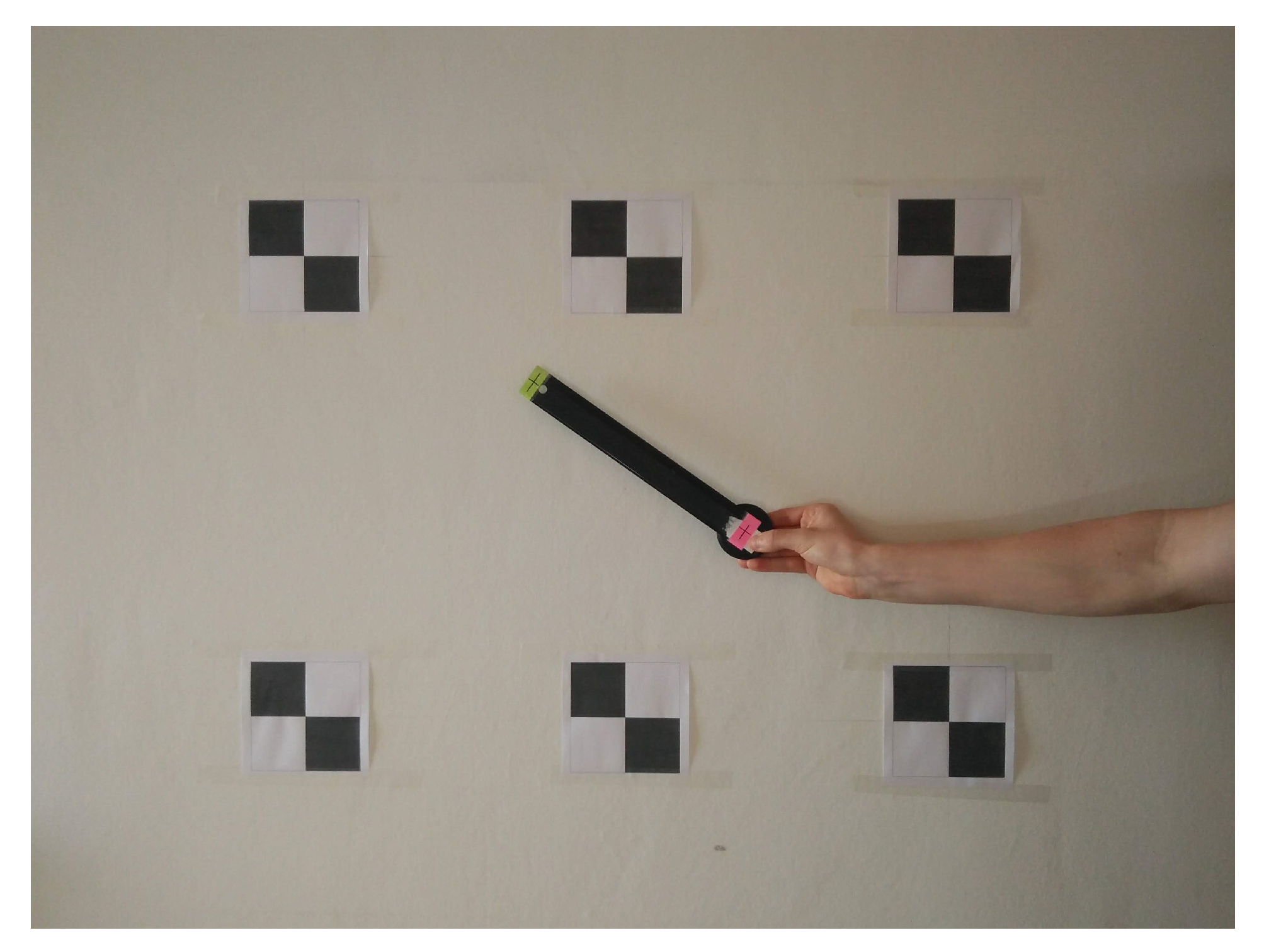
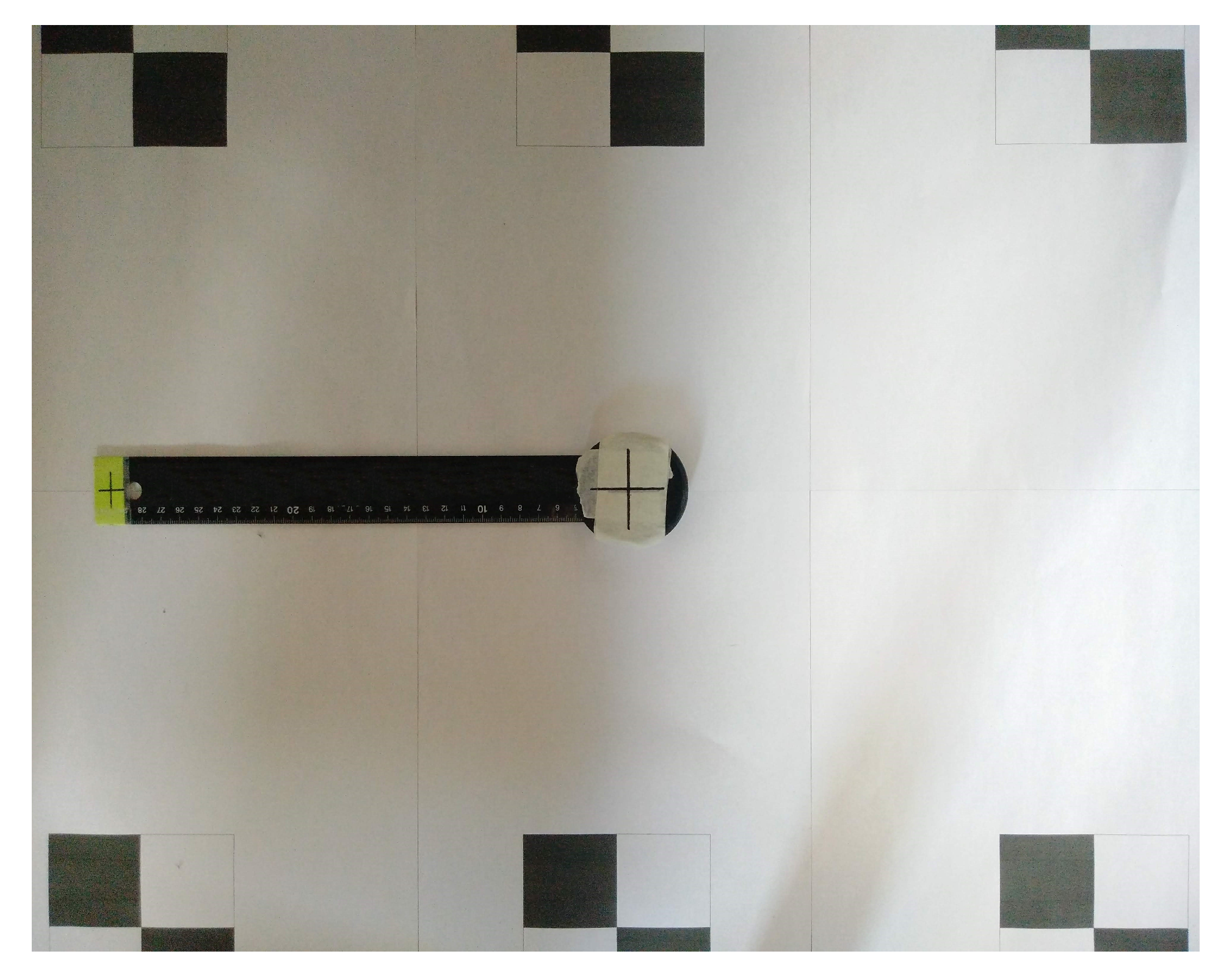
3. Validation with Easily Accessible Equipment
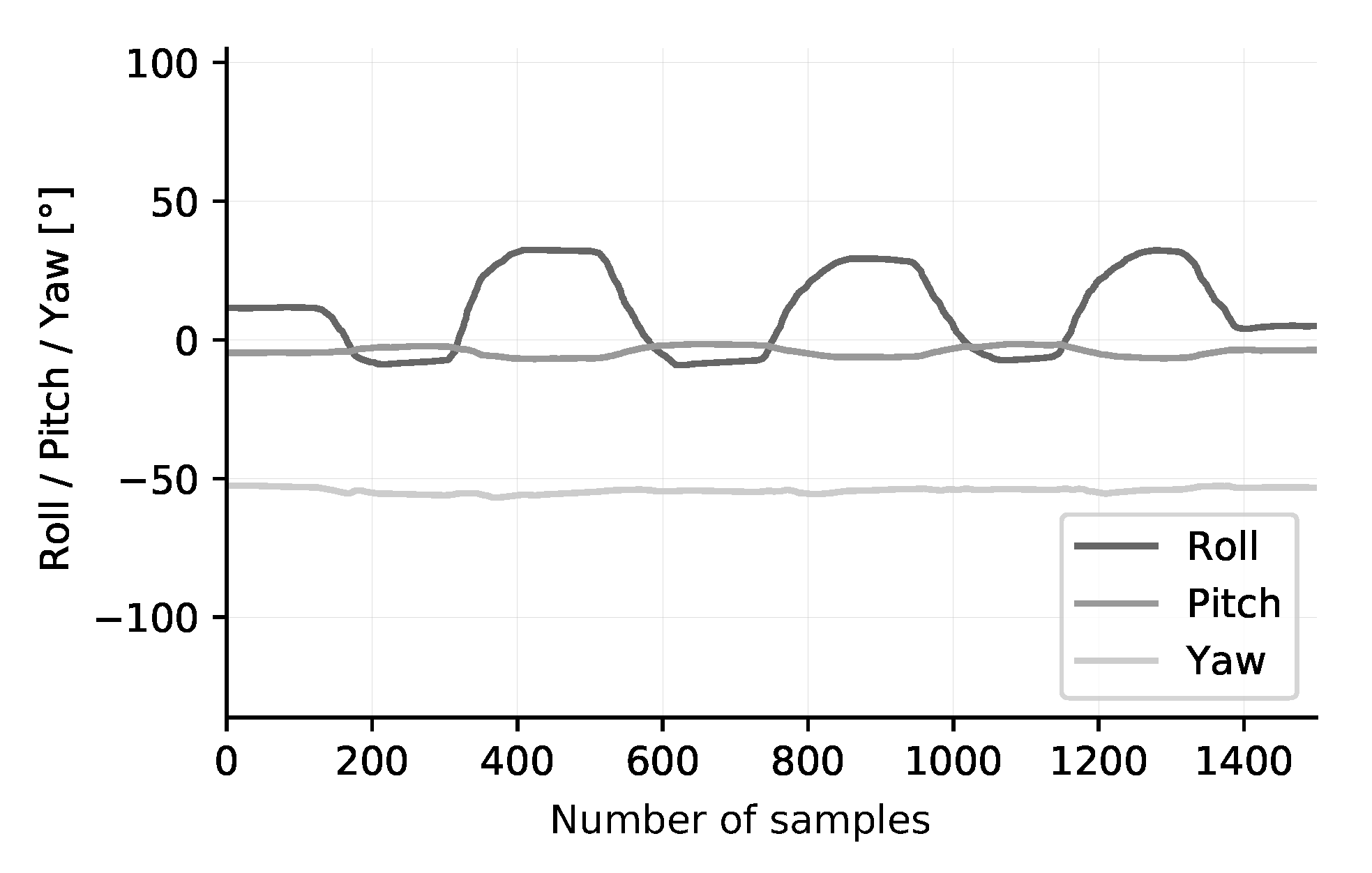
4. Validation with Real-Life Exercises
5. Opportunities in e-Treatment Applications and Extended Functionalities
5.1. Opportunities in Supporting e-Treatment in Physiotherapy
- The patient can perform the session more or less independently.
- The patient is abroad and wants to continue the treatment with the same physiotherapist. For example, elite athletes who have to travel a lot.
- A patient is not allowed to leave the house. The COVID-19 pandemic proved this to be a realistic scenario.
5.2. Extension to Multiple Sensor Nodes
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| BLE | Bluetooth Low Energy |
| DMP | Digital Motion Processor |
| DoF | Degrees of Freedom |
| FIFO | First In First Out |
| IMU | Inertial Measurement Unit |
| IoT | Internet of Things |
| LDO | Low-dropout |
| MEMS | Microelectromechanical Systems |
| NTC | Negative Temperature Coefficient |
| RTC | Real Time Counter |
| sEMG | Surface Electromyography |
| WBAN | Wireless Body Area Networks |
| WOM | Wake On Motion |
| WPC | Wireless Power Consortium |
| WPT | Wireless Power Transfer |
References
- Porciuncula, F.; Roto, A.V.; Kumar, D.; Davis, I.; Roy, S.; Walsh, C.J.; Awad, L.N. Wearable Movement Sensors for Rehabilitation: A Focused Review of Technological and Clinical Advances. PM&R 2018, 10, S220–S232. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Inertial Motion Capture System|Shop|Eliko. Available online: https://www.eliko.ee/shop/inertial-motion-capture-system/ (accessed on 27 October 2020).
- IMU Sensor Development Kit|Wireless IMU Sensor|9DOF Motion Sensor. Available online: https://www.shimmersensing.com/products/shimmer3-development-kit (accessed on 27 October 2020).
- Cappelle, J. Wireless Motion Sensor Node. Available online: https://github.com/DRAMCO/NOMADe-Wireless-Motion-Sensor-Node (accessed on 4 November 2020). [CrossRef]
- Brodie, M.; Walmsley, A.; Page, W. The static accuracy and calibration of inertial measurement units for 3D orientation. Comput. Methods Biomech. Biomed. Eng. 2008, 11, 641–648. [Google Scholar] [CrossRef] [PubMed]
- Vicon|Award Winning Motion Capture Systems. Available online: https://www.vicon.com/ (accessed on 9 September 2020).
- Kadir, K.; Yusof, Z.M.; Rasin, M.Z.M.; Billah, M.M.; Salikin, Q. Wireless IMU: A Wearable Smart Sensor for Disability Rehabilitation Training. In Proceedings of the 2018 2nd International Conference on Smart Sensors and Application (ICSSA), Kuching, Malaysia, 24–26 July 2018; pp. 53–57. [Google Scholar]
- Petropoulos, A.; Sikeridis, D.; Antonakopoulos, T. Wearable Smart Health Advisors: An IMU-Enabled Posture Monitor. IEEE Consum. Electron. Mag. 2020, 9, 20–27. [Google Scholar] [CrossRef]
- ICM-20948—TDK. Available online: https://www.invensense.com/products/motion-tracking/9-axis/icm-20948/ (accessed on 26 October 2019).
- Fei, Y.; Song, Y.; Xu, L.; Sun, G. Micro-IMU based Wireless Body Sensor Network. In Proceedings of the 33rd Chinese Control Conference, Nanjing, China, 28–30 July 2014; pp. 428–432. [Google Scholar]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- EFM32 Happy Gecko Family EFM32HG Data Sheet. Available online: https://www.silabs.com/documents/public/data-sheets/efm32hg-datasheet.pdf (accessed on 6 November 2020).
- Understanding Euler Angles—CH Robotics. Available online: http://www.chrobotics.com/library/understanding-euler-angles (accessed on 6 May 2020).
- Tuupola, M. How to Calibrate a Magnetometer? Available online: https://appelsiini.net/2018/calibrate-magnetometer/ (accessed on 10 April 2020).
- Ergen, S. ZigBee/IEEE 802.15.4 Summary. UC Berkeley Sept. 2004, 10, 11. [Google Scholar]
- Bin Ab Rahman, A. Comparison of Internet of Things ( IoT ) Data Link Protocols. Available online: https://www.semanticscholar.org/paper/Comparison-of-Internet-of-Things-(-IoT-)-Data-Link-Rahman/1cf94e2ebb27aaecdae3742e444ca9e87314216b (accessed on 7 November 2020).
- Danbatta, S.J.; Varol, A. Comparison of Zigbee, Z-Wave, Wi-Fi, and Bluetooth Wireless Technologies Used in Home Automation. In Proceedings of the 2019 7th International Symposium on Digital Forensics and Security (ISDFS), Barcelos, Portugal, 10–12 June 2019; pp. 1–5. [Google Scholar]
- Proteus-II—Bluetooth Smart 5.0 Module (AMB2623). Available online: https://katalog.we-online.de/en/wco/WIRL_BTLE_5 (accessed on 26 October 2019).
- Cx51 User’s Guide: Floating-Point Numbers. Available online: http://www.keil.com/support/man/docs/c51/c51_ap_floatingpt.htm (accessed on 18 March 2020).
- NUCLEO-L4R5ZI—STM32 Nucleo-144 Development Board with STM32L4R5ZI MCU— STMicroelectronics. Available online: https://www.st.com/en/evaluation-tools/nucleo-l4r5zi.html (accessed on 17 March 2020).
- UART Receive Buffering—Simply Embedded. Available online: http://www.simplyembedded.org/tutorials/interrupt-free-ring-buffer/ (accessed on 17 March 2020).
- Semtech Releases Next-Generation LinkCharge® LP (Low Power) Wireless Charging Platform. Available online: https://www.semtech.com/company/press/semtech-releases-next-generation-linkcharge-lp-low-power-wireless-charging-platform (accessed on 6 November 2020).
- BQ5105xB High-Efficiency Qi v1.2-Compliant Wireless Power Receiver and Battery Charger. Available online: ti.com/lit/ds/symlink/bq51051b.pdf?ts=1604672421028 (accessed on 6 November 2020).
- Galaxy S10 Reverse Wireless Charging Feature: How to Use It. Available online: https://www.valuewalk.com/2019/03/galaxy-s10-reverse-wireless-charging/ (accessed on 6 November 2020).
- WE-WPCC Wireless Power Charging Receiver Coil 760308101214. Available online: https://www.we-online.com/catalog/datasheet/760308101214.pdf (accessed on 6 November 2020).
- Puers, R. Inductive Powering: Basic Theory and Application to Biomedical Systems, 1st ed.; Springer: Dordrecht, The Netherlands, 2009. [Google Scholar]
- Computer Controlled Pan-Tilt Unit Model PTU-D46. Available online: www.imagelabs.com/wp-content/uploads/2011/01/Specs-PTU-D46.pdf (accessed on 6 November 2020).
- Madgwick, S.O.H. An Efficient Orientation Filter for Inertial and Inertial/Magnetic Sensor Arrays; Internal report by x-io Technologies Limited: Bristol, UK, 30 April 2010. [Google Scholar]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar]
- Isard, M.; Blake, A. CONDENSATION—Conditional Density Propagation for Visual Tracking. Int. J. Comput. Vis. 1998, 29, 5–28. [Google Scholar] [CrossRef]
- de Kok, J.; Vroonhof, P.; Snijders, J.; Roullis, G.; Clarke, M.; Peereboom, K.; van Dorst, P.; Isusi, I. Work-Related Musculoskeletal Disorders: Prevalence, Costs and Demographics in the EU; European Agency for Safety and Health at Work: Bilbao, Spain, 2019. [Google Scholar]
- Dierick, F.; Buisseret, F.; Brismée, J.M.; Fourré, A.; Hage, R.; Leteneur, S.; Monteyne, L.; Thevenon, A.; Thiry, P.; Van der Perre, L.; et al. Opinion on the Effectiveness of Physiotherapy Management of Neuro-Musculo-Skeletal Disorders by Telerehabilitation. Available online: https://www.ifompt.org/site/ifompt/Telerehab_EN.pdf (accessed on 27 October 2020).
- Coviello, G.; Avitabile, G.; Florio, A. A Synchronized Multi-Unit Wireless Platform for Long-Term Activity Monitoring. Electronics 2020, 9, 1118. [Google Scholar] [CrossRef]
- Claesson, E.; Marklund, S. Calibration of IMUs using Neural Networks and Adaptive Techniques Targeting a Self-Calibrated IMU. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2019. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ZigBee | Z-Wave | Bluetooth 5 | BLE | WiFi | |
|---|---|---|---|---|---|
| Power consumption (max) | 100 mW | 1 mW | 100 mW | 10 mW | >100 mW |
| Range (max) | 100 m | 30 m | 100 m | <100 m | 1000 m |
| Data rate (max) | 250 kbps | 100 kbps | 2 Mbps | 1 Mbps | 54 Mbps |
| Price | Low | High | Very low | Very low | Average |
| Target Angle [°] | Reference [°] | Sensor [°] | Error [°] | |
|---|---|---|---|---|
| Pitch | 0 | 0.08 | −3.2 | 3.28 |
| 45 | 44.76 | 42.5 | 2.26 | |
| 90 | 90.19 | 95.04 | −4.85 | |
| 180 | 178.45 | 176.6 | 1.85 | |
| Roll | 0 | 0.47 | 1.8 | −1.33 |
| 45 | 48.41 | 44.8 | 3.61 | |
| 90 | 90.15 | 87 | 3.15 | |
| 180 | 180.01 | 177.1 | 2.91 | |
| Yaw | 45 | 48.03 | 45.1 | 2.93 |
| 90 | 95.49 | 88.9 | 6.59 | |
| 180 | 182.18 | 185.2 | −3.02 | |
| 270 | 274.12 | 270.5 | 3.62 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cappelle, J.; Monteyne, L.; Van Mulders, J.; Goossens, S.; Vergauwen, M.; Van der Perre, L. Low-Complexity Design and Validation of Wireless Motion Sensor Node to Support Physiotherapy. Sensors 2020, 20, 6362. https://0-doi-org.brum.beds.ac.uk/10.3390/s20216362
Cappelle J, Monteyne L, Van Mulders J, Goossens S, Vergauwen M, Van der Perre L. Low-Complexity Design and Validation of Wireless Motion Sensor Node to Support Physiotherapy. Sensors. 2020; 20(21):6362. https://0-doi-org.brum.beds.ac.uk/10.3390/s20216362
Chicago/Turabian StyleCappelle, Jona, Laura Monteyne, Jarne Van Mulders, Sarah Goossens, Maarten Vergauwen, and Liesbet Van der Perre. 2020. "Low-Complexity Design and Validation of Wireless Motion Sensor Node to Support Physiotherapy" Sensors 20, no. 21: 6362. https://0-doi-org.brum.beds.ac.uk/10.3390/s20216362