Energy Harvesting Technologies for Structural Health Monitoring of Airplane Components—A Review

 ,
,  ,
,  , , ,
, , ,  , ,
, ,  , , ,
, , ,  , , ,
, , ,  add
Show full author list
add
Show full author list
Abstract
:1. Introduction
2. Kinetic Energy Harvesting Systems
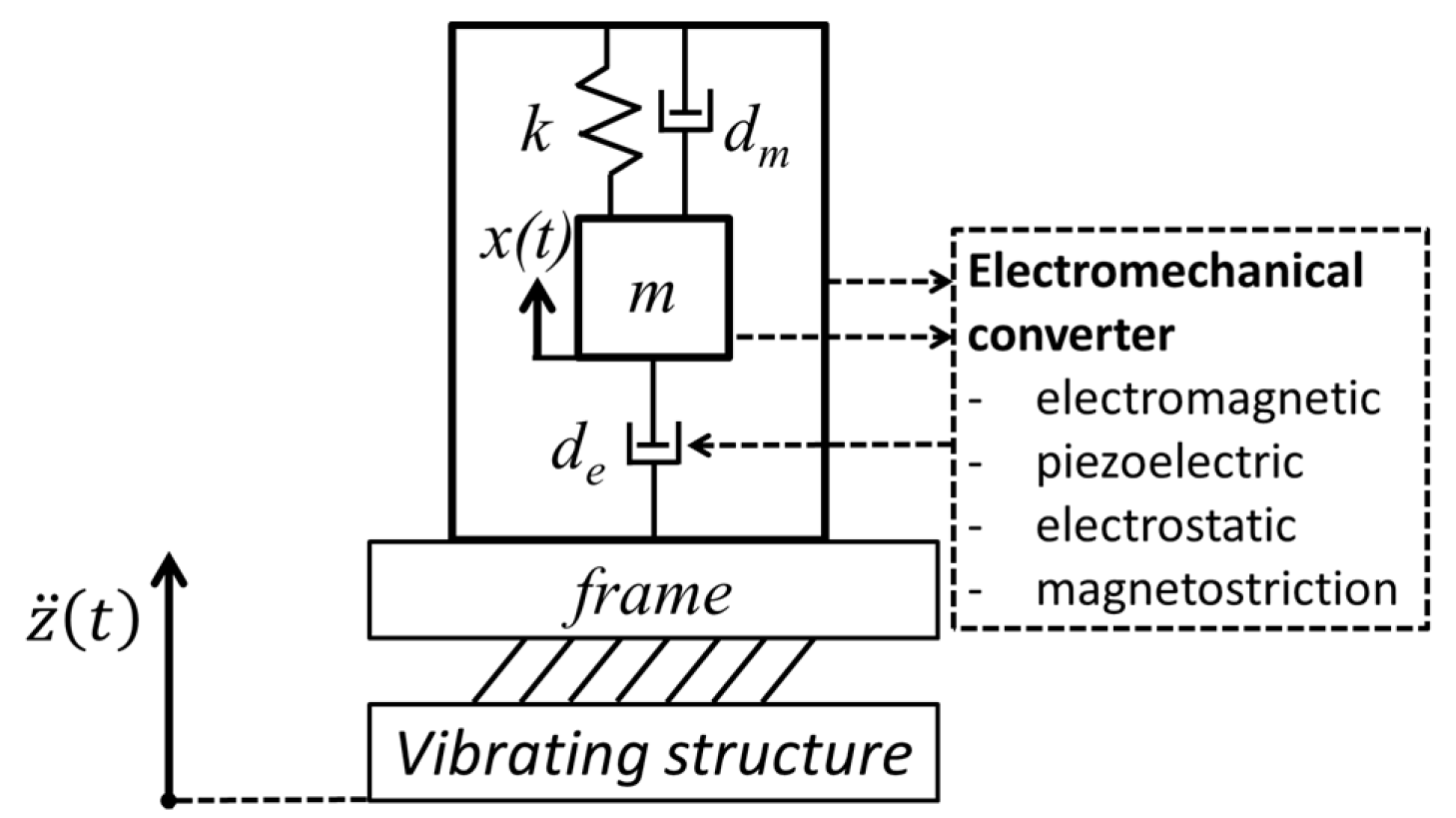
2.1. Physical Principles of Electromechanical Conversion
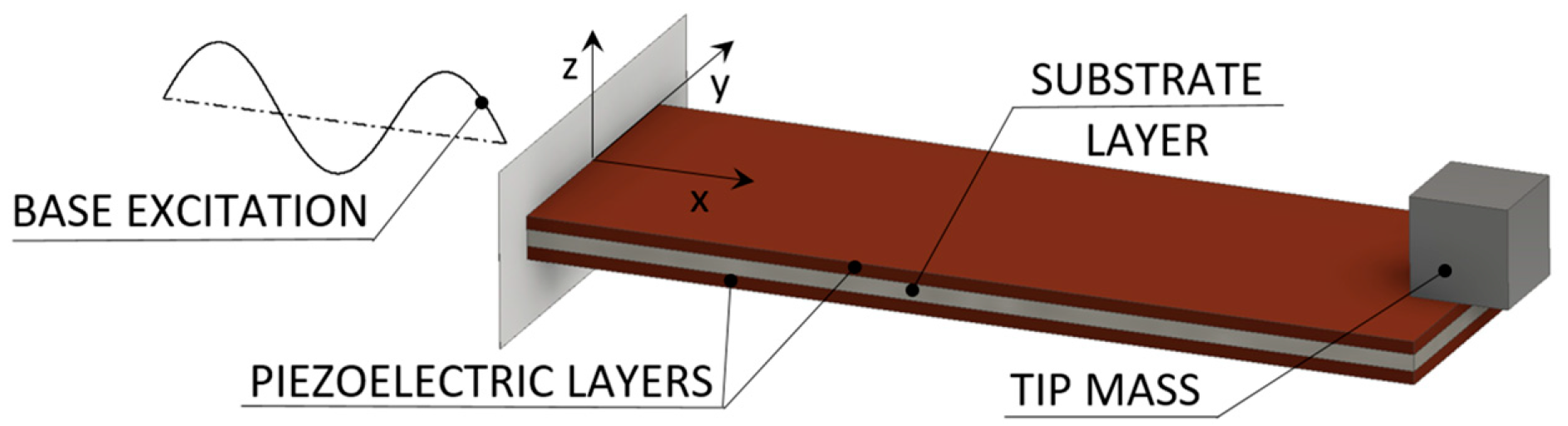
- In vibration energy harvesters the piezoelectric material is integrated onto an additional mechanical structure in the form of a mechanical resonator, thus inducing the strain of the piezoelectric material.
- In the case of strain energy harvesters, the piezoelectric material is, in turn, integrated onto the part of the airplane structure that during operation is subject to vibrations, varied loads, and similar dynamical excitation, inducing mechanical strain of the structure itself and of the piezoelectric material affixed onto it.
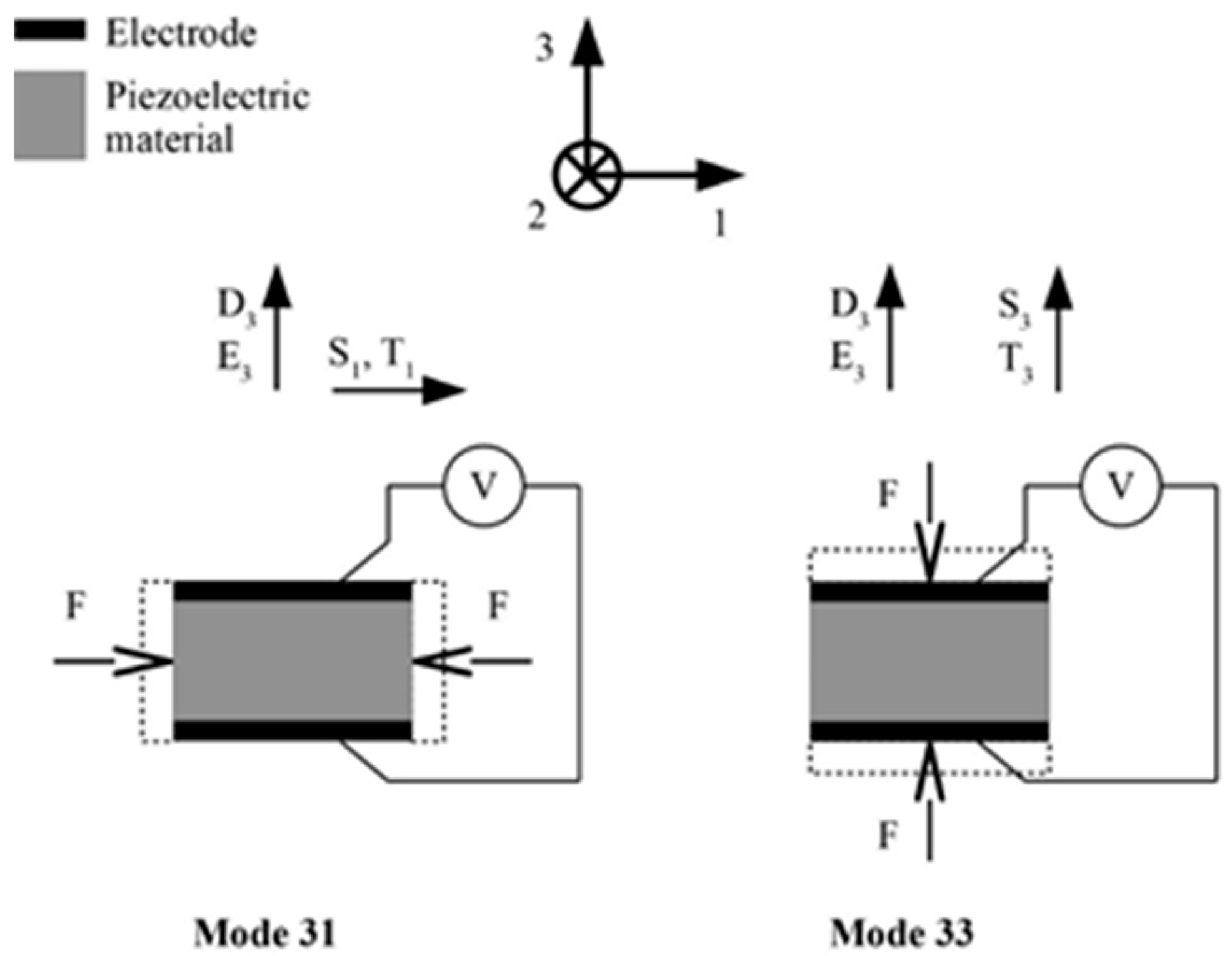
2.1.1. The Piezoelectric Effect and Operational Modes
2.1.2. Electromagnetic Conversion
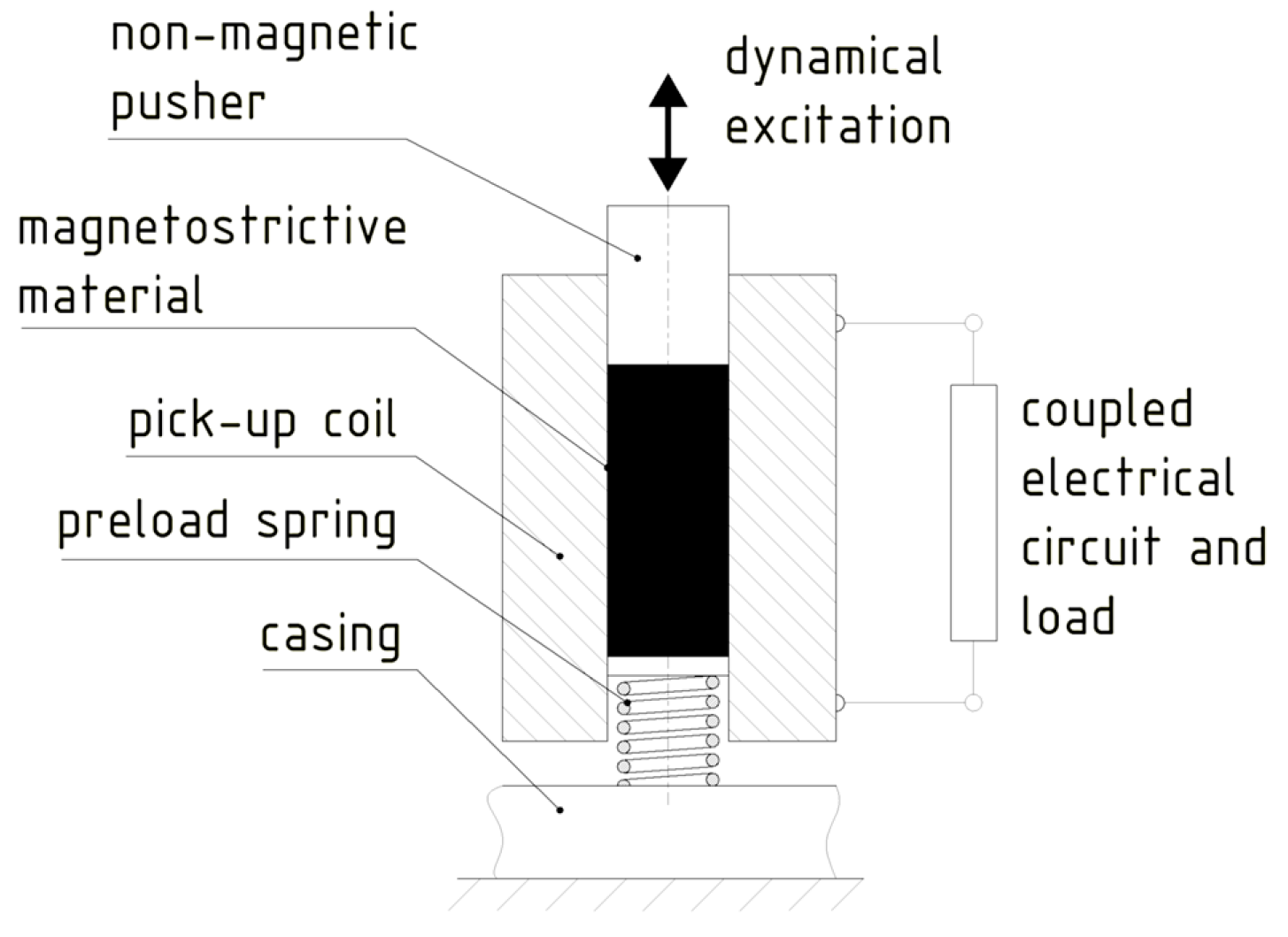
2.1.3. The Magnetostrictive Effect
2.2. Vibration Energy Harvesting
2.2.1. Piezoelectric Vibration Energy Harvesters for Aeronautic Applications
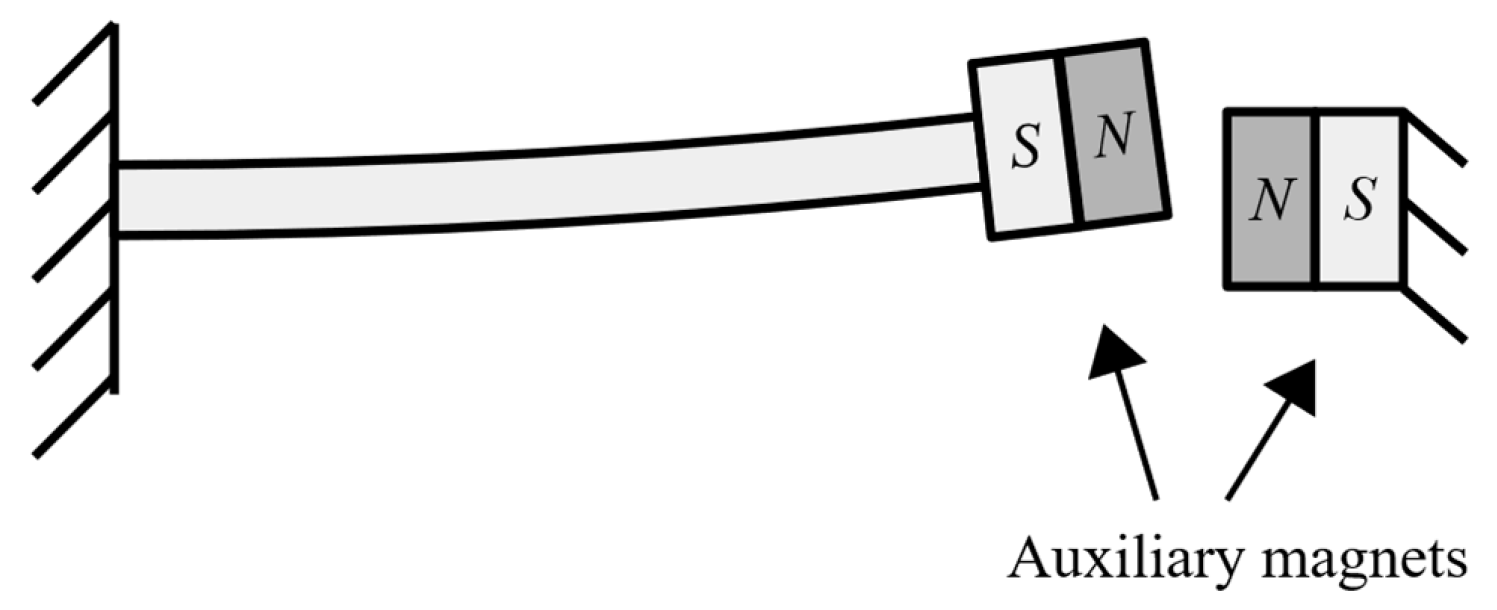
- Changing the conditions around the cantilever free end (e.g., via damping control or active tuning), often inducing and/or combined with features inducing the nonlinear response of the PEH device.
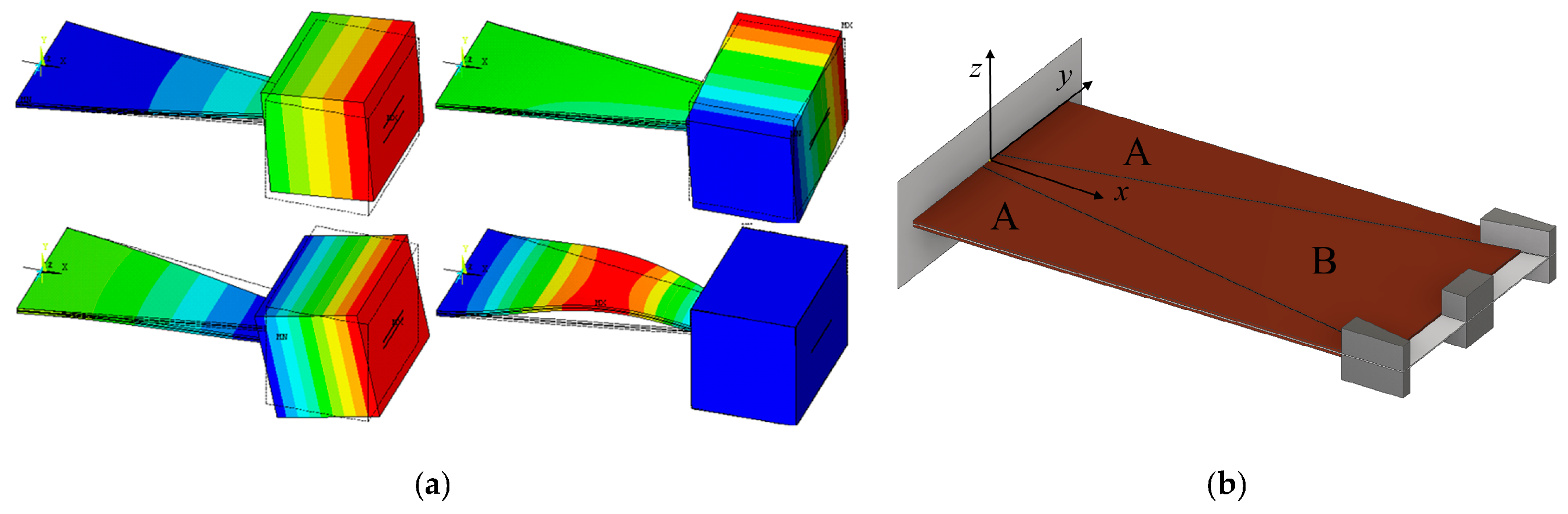
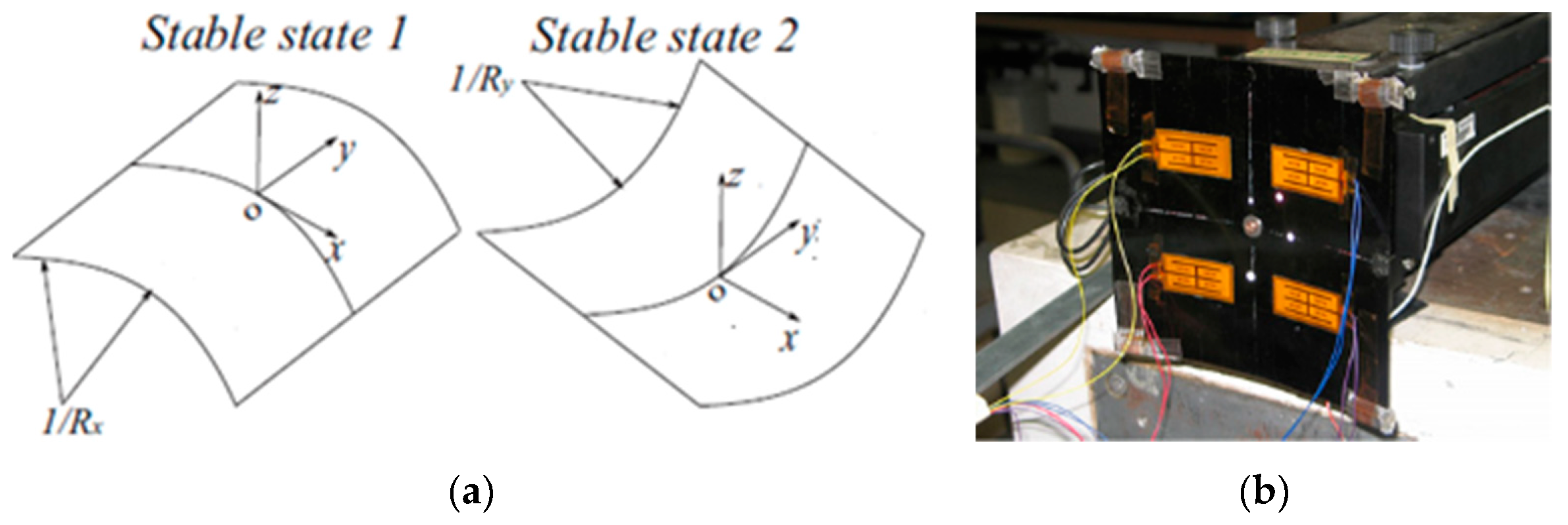
- Changing the geometry of the PEH cantilever, herein including complex geometries with bistable configurations, or employing a large number of differently sized (i.e., tuned) cantilevers.
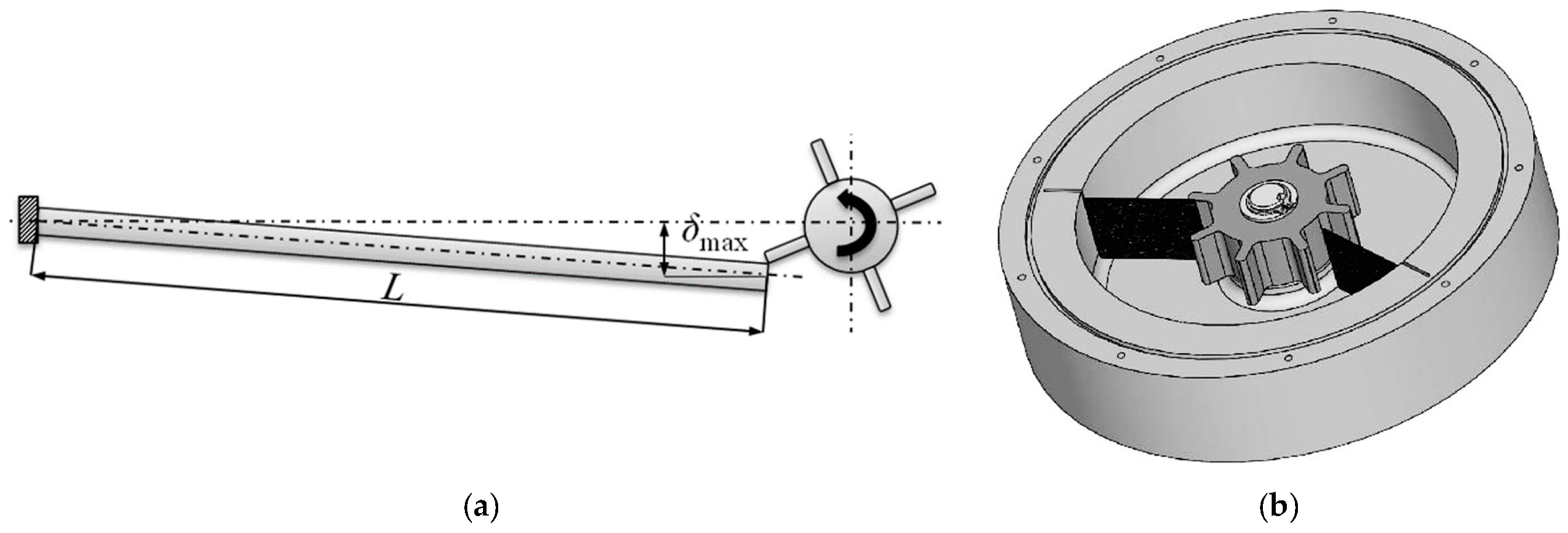
- Using a frequency up-conversion mechanisms, e.g., by plucking the free end of the piezoelectric cantilever and letting it oscillate at its eigenfrequency.
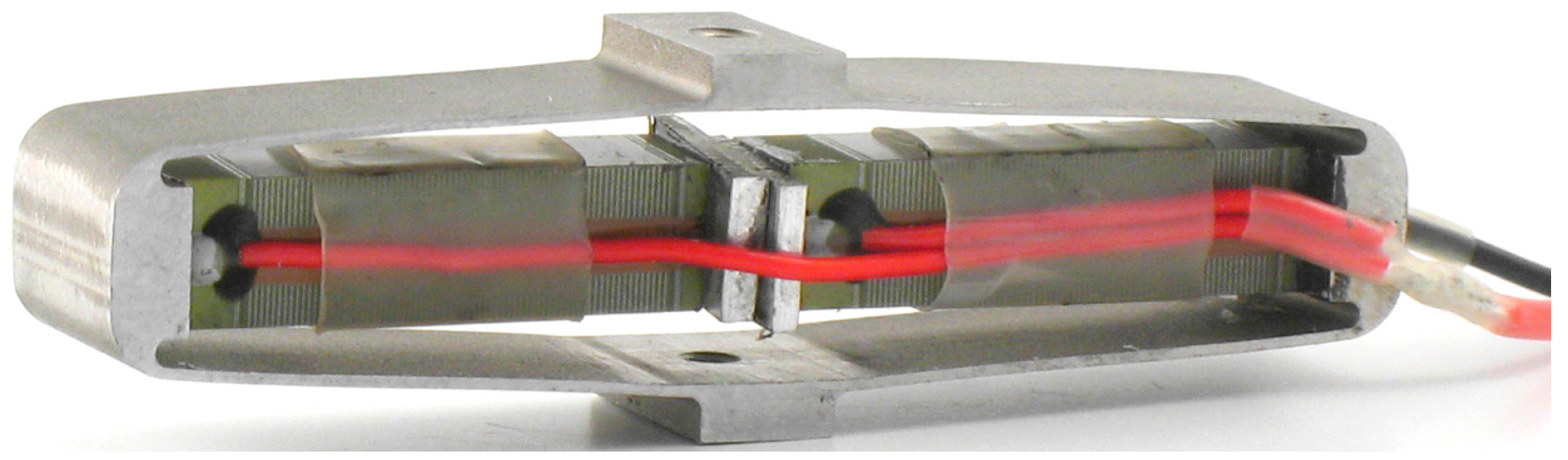
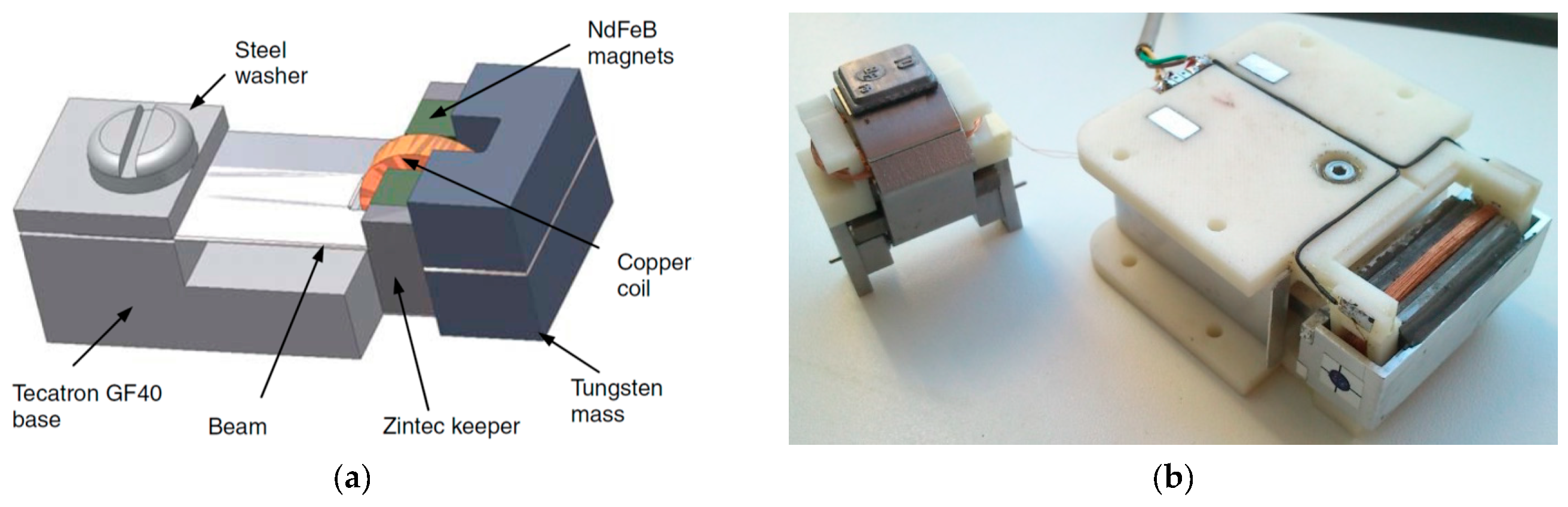
2.2.2. Electromagnetic Resonators for Aeronautic Applications
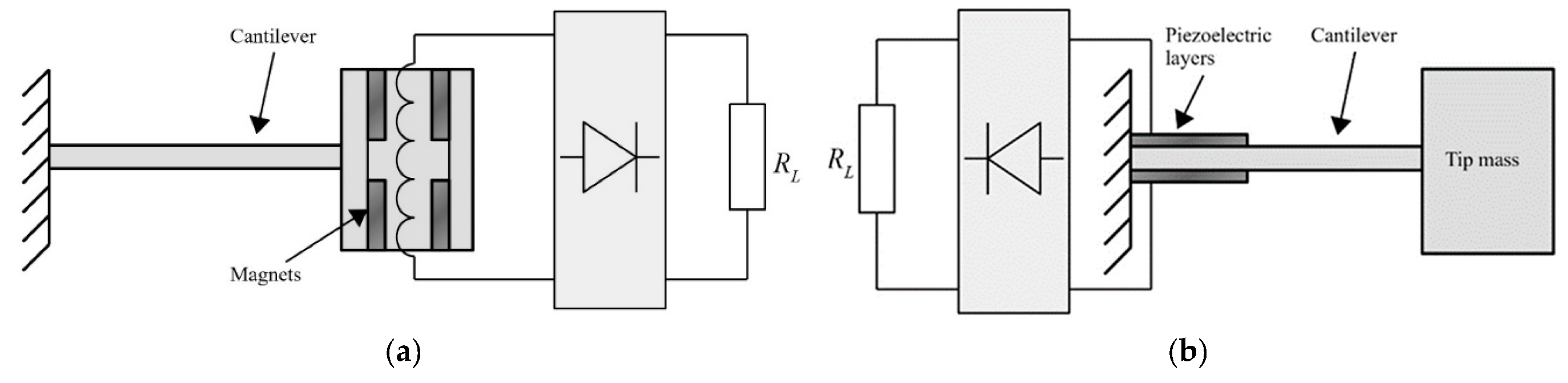
2.2.3. Piezoelectric vs. Electromagnetic Vibration EH Devices
2.2.4. Potential to Use Magnetostrictive Vibration Harvesters in Aircraft
2.2.5. Potential to Harvest Dynamical Excitation Energy via Electrostatic and TENG Harvesters
2.3. Strain Energy Harvesting
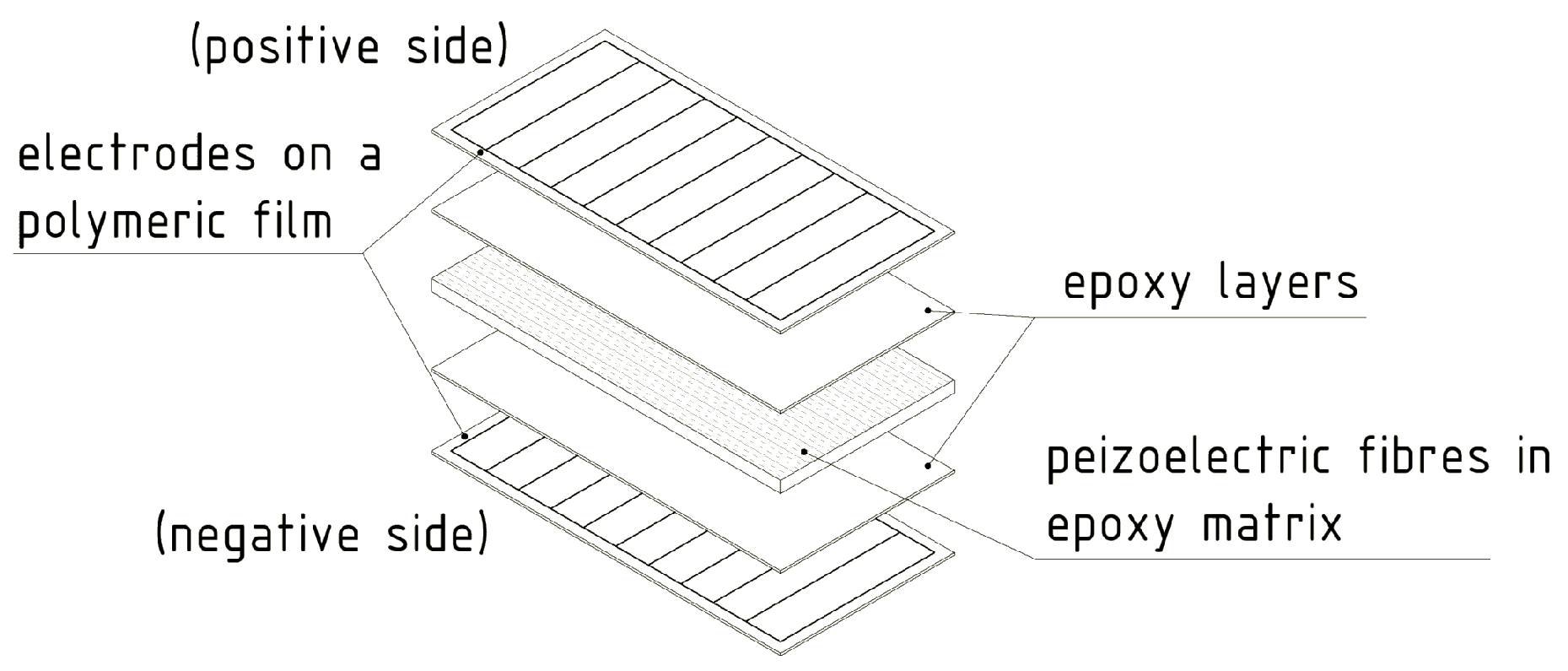
2.3.1. Piezoelectric Patches and Macro Fibre Composites (MFC)
2.3.2. Polymer Piezoelectric Skin and Composite Structures
2.4. Summary of Findings on Kinetic Energy Harvesting
3. Thermoelectric Energy Harvesting Systems
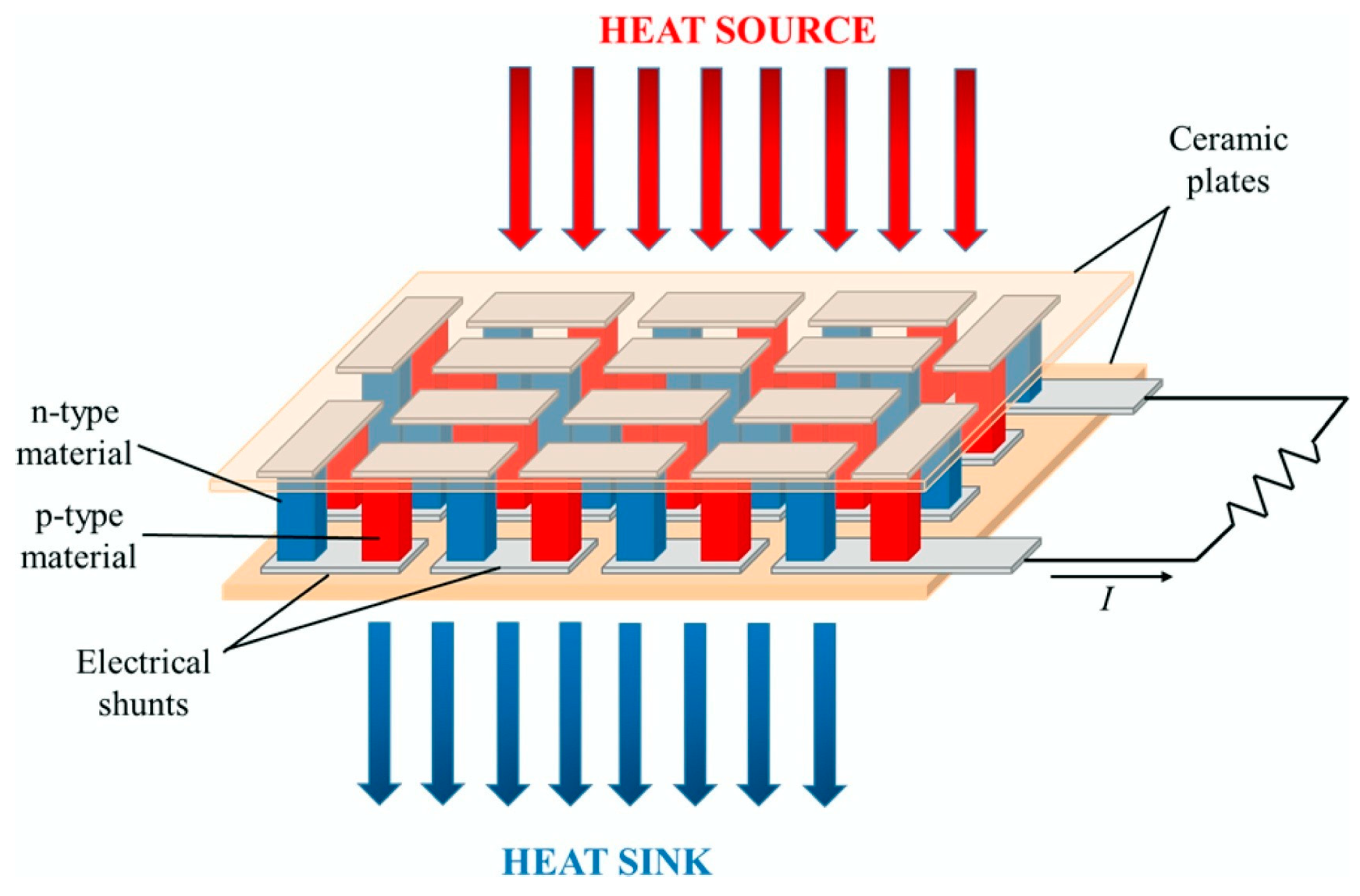
3.1. Working Principle of the TEG Module
3.2. Thermoelectric Energy Harvesting in Airplanes
3.2.1. High Temperature Difference Applications of TEGs in Airplanes
3.2.2. Medium Temperature Difference Applications of TEGs in Airplanes
3.2.3. Low Temperature Difference TEGs on Airplanes
3.3. Summary of Findings on Thermoelectric Energy Harvesting
4. Photovoltaic Energy Harvesting Systems
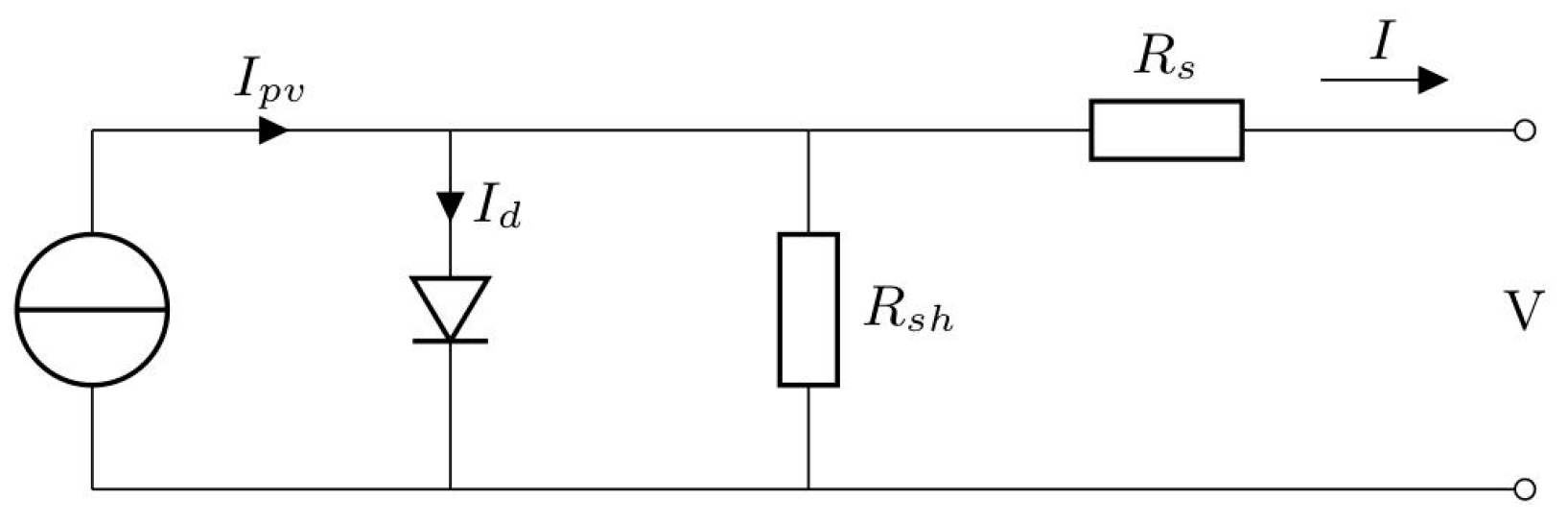
4.1. Photovoltaic Cells and Systems
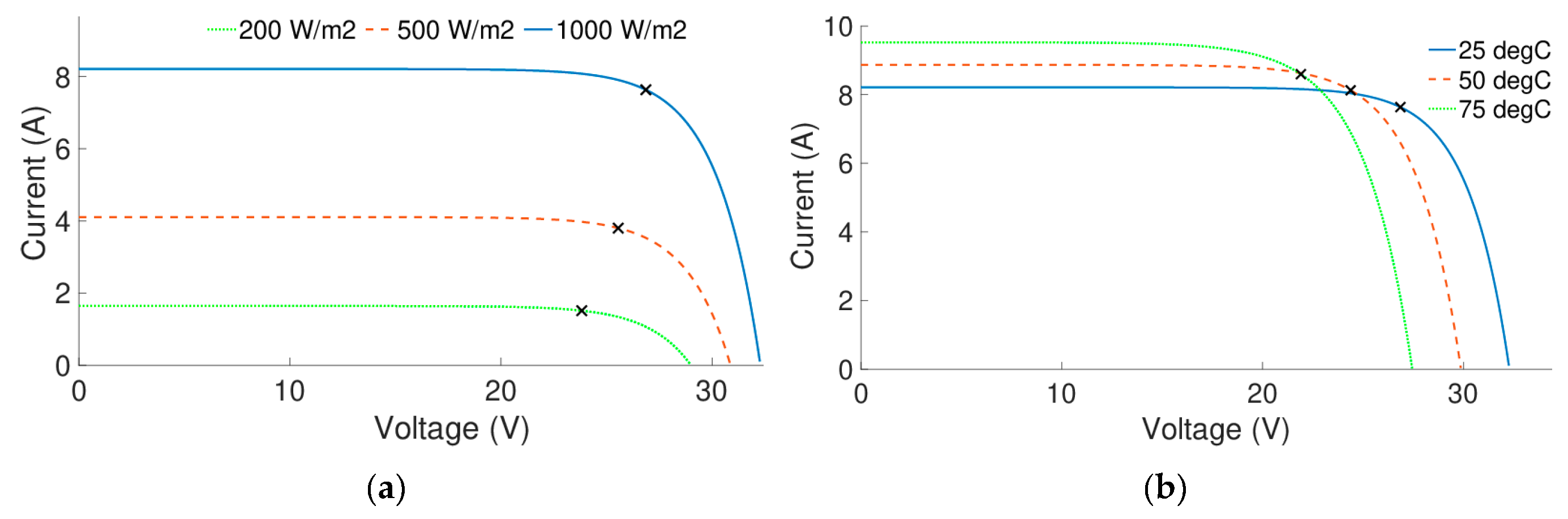
4.2. External Influences
4.3. Summary of Findings on Photovoltaic Energy Harvesting
5. Airflow and Acoustic Energy Harvesting Systems
5.1. Rotary Micro-Turbines
5.2. Air-Structure Interaction of Oscillating Bodies
5.3. Acoustic Energy Harvesting
5.4. Summary of Findings on Airflow and Acoustic Energy Harvesting
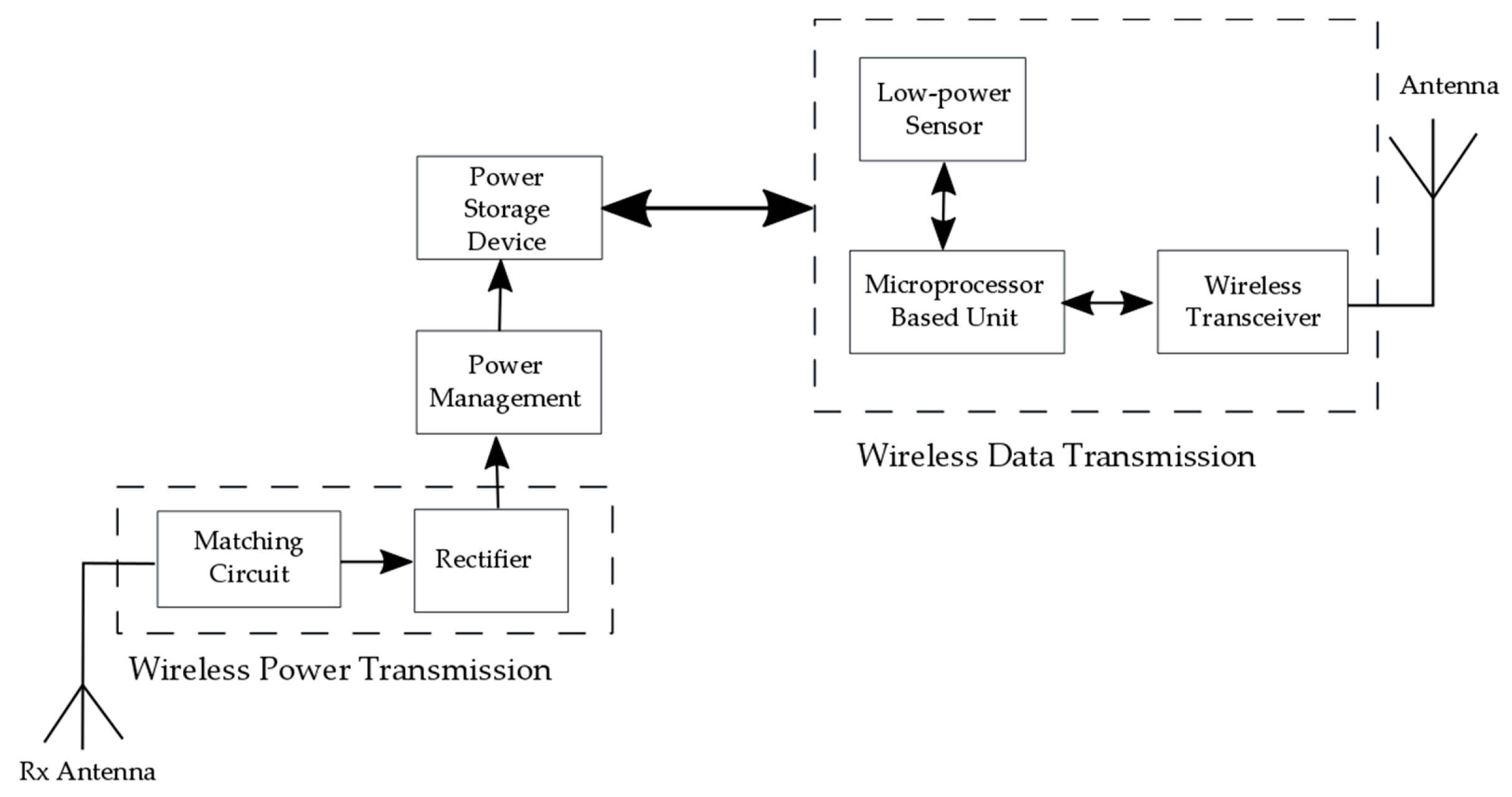
6. Radio Frequency Energy Harvesting and Wireless Energy Transmission Systems
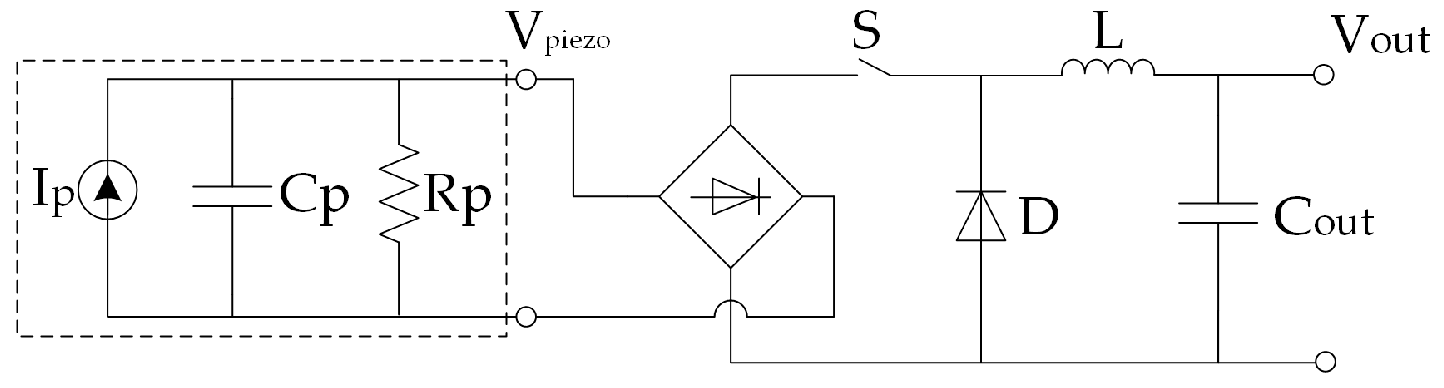
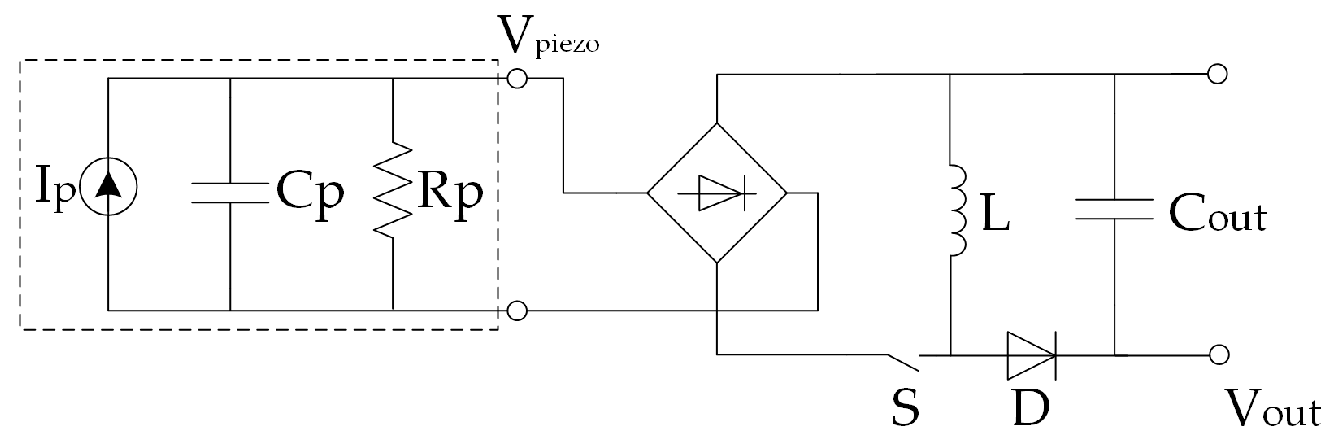
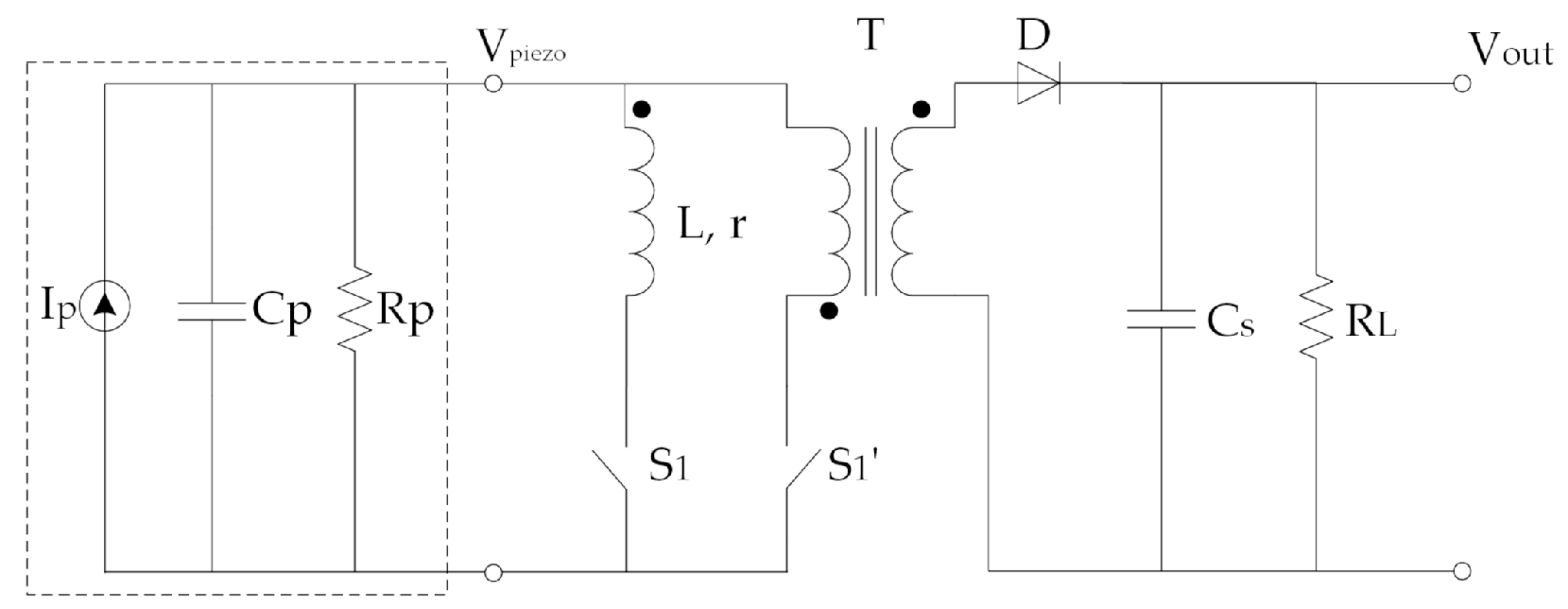
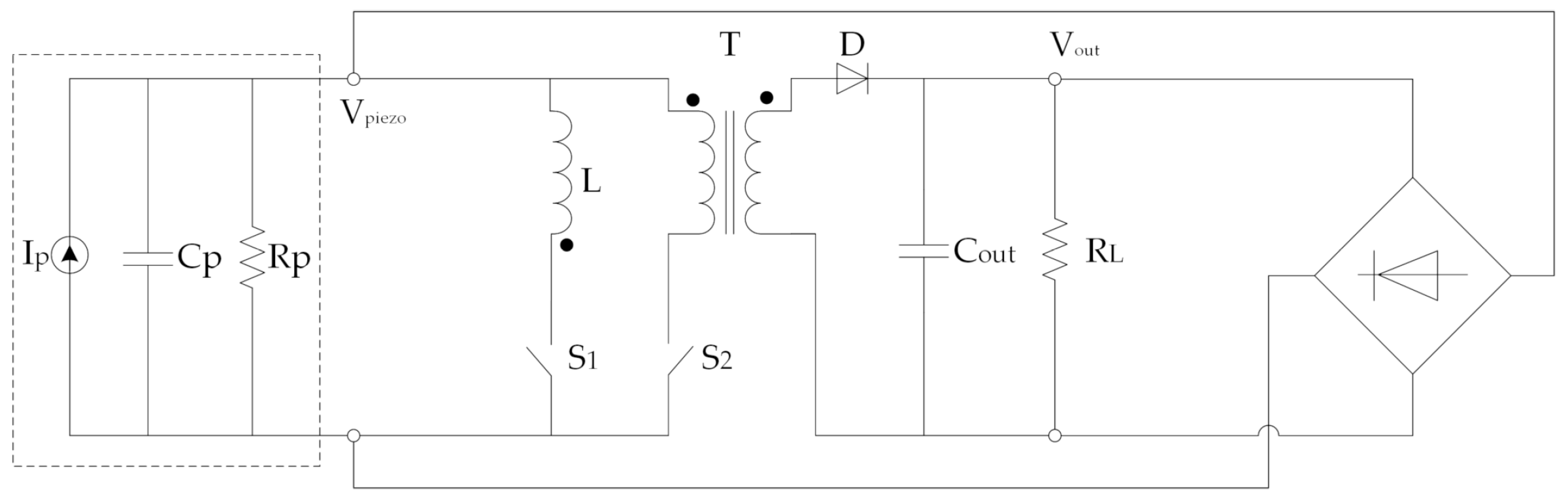
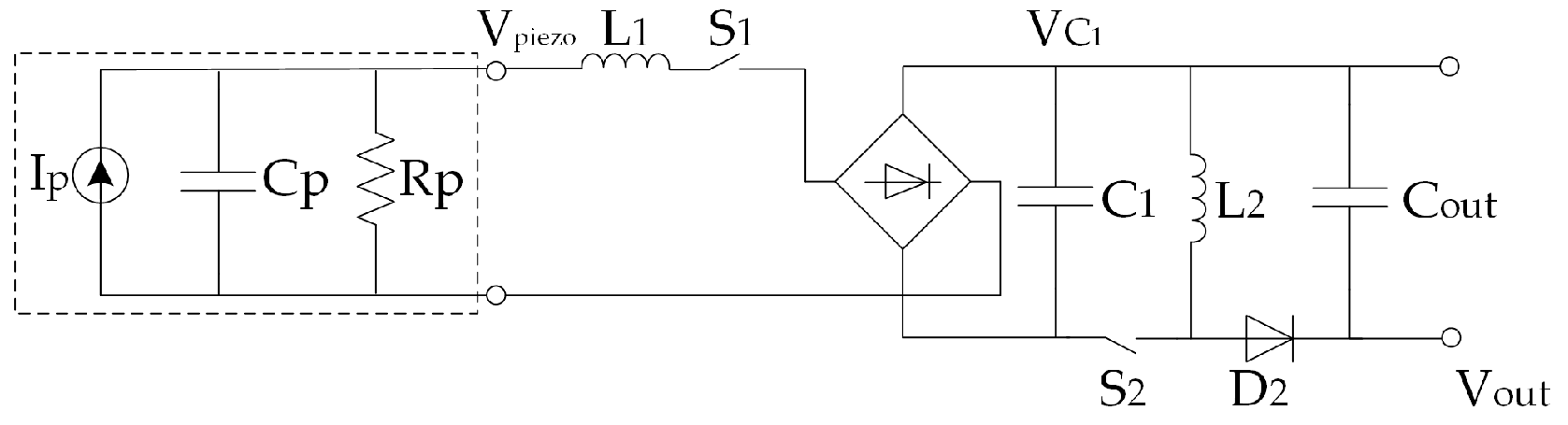
7. Power Management Electronics and Energy Storage Elements
- A highly efficient DC-to-DC converter used to adjust the voltage amplitude to the needed level as well as for impedance matching (i.e., adapting the input impedance to the maximum power point of the harvester) [66]. DC-to-DC converters also often have the function of boost converters (multipliers).
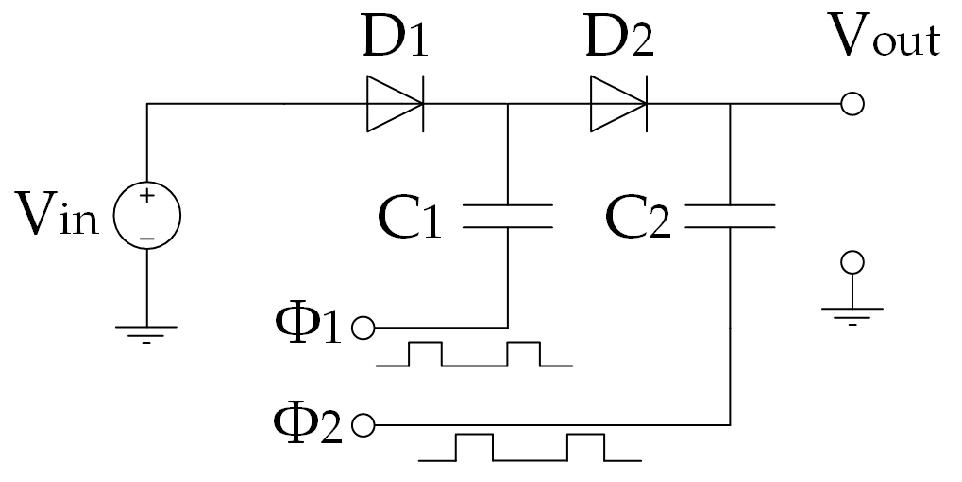
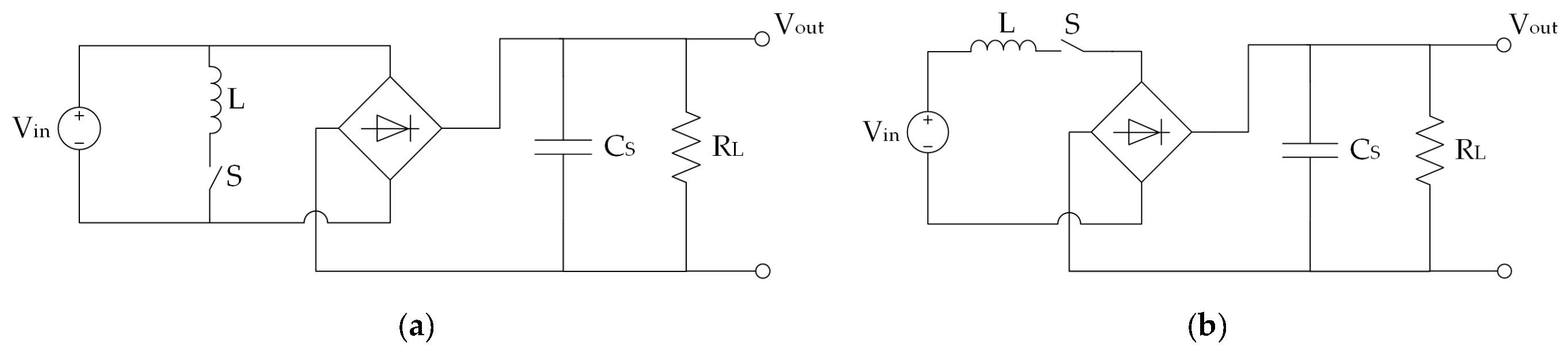
- The power management circuity that often integrates a low-loss (i.e., with a voltage drop of barely 0.7 V) full-wave bridge rectifier for the conversion of AC to DC voltage (for EH devices producing AC output voltage), the maximum power point tracking (MPPT) unit (setting the required input voltage value, thus allowing to extract the maximum available energy that an EH generator can produce), and the ’cold start’ circuitry (used, rarely, to initialise the operation of the EH device) [2,219,220]. Several commercially available solutions of this type are available as off-the-shelf products [32]. Examples of circuitry that can be used in specific applications are also state-of-charge (SoC) monitoring devices that are used to control the load based on the available energy so that it is operated only when the harvester generates appropriate energy levels.
- An energy storage device in the form of a polarized capacitor, a super-capacitor, a battery or a hybrid solution [219].
8. Conclusions and Outlook
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Becker, T.; Kluge, M.; Schalk, J.; Tiplady, K.; Paget, C.; Hilleringmann, U.; Otterpohl, T. Autonomous Sensor Nodes for Aircraft Structural Health Monitoring. IEEE Sens. J. 2009, 9, 1589–1595. [Google Scholar] [CrossRef]
- Thangaraj, K. Development of efficient energy storage and power management for autonomous aircraft structural health monitoring system. Ph.D. Thesis, Cardiff University, Cardiff, UK, November 2017. [Google Scholar]
- Ross, R.W. Integrated vehicle health management in aerospace structures. In Structural Health Monitoring (SHM) in Aerospace Structures; Yuan, F.-G., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 3–31. [Google Scholar] [CrossRef]
- Cawley, P. Structural health monitoring: Closing the gap between research and industrial deployment. Struct. Health Monit. 2018, 17, 1225–1244. [Google Scholar] [CrossRef] [Green Version]
- Abbas, S.; Li, F.; Qiu, J. A Review on SHM Techniques and Current Challenges for Characteristic Investigation of Damage in Composite Material Components of Aviation Industry. Mater. Perform. Charact. 2018, 7, 20170167. [Google Scholar] [CrossRef]
- Qing, X.; Li, W.; Wang, Y.; Sun, H. Piezoelectric transducer-based structural health monitoring for aircraft applications. Sensors 2019, 19, 545. [Google Scholar] [CrossRef]
- Dong, T.; Kim, N.H. Cost-effectiveness of structural health monitoring in fuselage maintenance of the civil aviation industry. Aerospace 2018, 5, 87. [Google Scholar] [CrossRef] [Green Version]
- Pearson, M.R.; Eaton, M.J.; Pullin, R.; Featherston, C.A.; Holford, K.M. Energy Harvesting for Aerospace Structural Health Monitoring Systems. J. Phys. Conf. Ser. 2012, 382, 012025. [Google Scholar] [CrossRef] [Green Version]
- Memorandum of Understanding for the Implementation of the COST Action “Optimising Design for Inspection” (ODIN) CA 18203; COST Association: Brussels, Belgium, 2019; Available online: http://odin-cost.com/ (accessed on 22 September 2020).
- Papasalouros, D.; Tsopelas, N.; Anastasopoulos, A.; Kourosis, D.; Lekou, D.J.; Mouzakis, F. Acoustic Emission Monitoring of Composite Blade of NM48 / 750 NEG—MICON Wind Turbine. J. Acoust. Emiss. 2013, 31, 36–49. [Google Scholar]
- Hill, E.; Rovik, C. In-Flight Fatigue Crack Growth Monitoring in a Cessna T-303 Crusader Vertical Tail. J. Acoust. Emiss. 2013, 31, 19–35. [Google Scholar]
- Holford, K.M.; Pullin, R.; Evans, S.L.; Eaton, M.J.; Hensman, J.; Worden, K. Acoustic emission for monitoring aircraft structures. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2009, 223, 525–532. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J.L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208–1217. [Google Scholar] [CrossRef]
- Mei, H.; Haider, M.F.; Joseph, R.; Migot, A.; Giurgiutiu, V. Recent advances in piezoelectric wafer active sensors for structural health monitoring applications. Sensors 2019, 19, 383. [Google Scholar] [CrossRef] [Green Version]
- Ren, B.; Lissenden, C.J. PVDF multielement lamb wave sensor for structural health monitoring. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2016, 63, 178–185. [Google Scholar] [CrossRef]
- Holst, C.A.; Lohweg, V.; Röckemann, K.; Steinmetz, A. Lamb Wave-based Quality Inspection of Repaired Carbon Fibre Reinforced Polymers for On-Site Aircraft Maintenance. In Proceedings of the IEEE International Conference on Emerging Technologies and Factory Automation, Zaragoza, Spain, 10–13 September 2019; pp. 1643–1646. [Google Scholar] [CrossRef]
- Memmolo, V.; Monaco, E.; Boffa, N.D.; Maio, L.; Ricci, F. Guided wave propagation and scattering for structural health monitoring of stiffened composites. Compos. Struct. 2018, 184, 568–580. [Google Scholar] [CrossRef]
- Derriso, M.M.; McCurry, C.D.; Schubert Kabban, C.M. A novel approach for implementing structural health monitoring systems for aerospace structures. In Structural Health Monitoring (SHM) in Aerospace Structures; Yuan, F.-G., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 33–56. [Google Scholar] [CrossRef]
- Yu, L.; Tian, Z. Phased array techniques for damage detection in aerospace structures. In Structural Health Monitoring (SHM) in Aerospace Structures; Yuan, F.-G., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 285–306. [Google Scholar] [CrossRef]
- Su, Z.; Hong, M. Nonlinear ultrasonics for health monitoring of aerospace structures using active sparse sensor networks. In Structural Health Monitoring (SHM) in Aerospace Structures; Yuan, F.-G., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 353–392. [Google Scholar] [CrossRef]
- Hill, K.O.; Meltz, G. Fiber Bragg grating technology fundamentals and overview. J. Lightwave Technol. 1997, 15, 1263–1276. [Google Scholar] [CrossRef] [Green Version]
- Kahandawa, G.C.; Epaarachchi, J.; Wang, H.; Lau, K.T. Use of FBG sensors for SHM in aerospace structures. Photonic Sens. 2012, 2, 203–214. [Google Scholar] [CrossRef] [Green Version]
- Cusano, A.; Capoluongo, P.; Campopiano, S.; Cutolo, A.; Giordano, M.; Felli, F.; Paolazzi, A.; Caponero, M. Experimental modal analysis of an aircraft model wing by embedded fiber Bragg grating sensors. IEEE Sens. J. 2006, 6, 67–77. [Google Scholar] [CrossRef]
- Gao, Z.; Zhu, X.; Fang, Y.; Zhang, H. Active monitoring and vibration control of smart structure aircraft based on FBG sensors and PZT actuators. Aerosp. Sci. Technol. 2017, 63, 101–109. [Google Scholar] [CrossRef]
- Choi, Y.; Abbas, S.H.; Lee, J.-R. Aircraft integrated structural health monitoring using lasers, piezoelectricity, and fiber optics. Measurement 2018, 125, 294–302. [Google Scholar] [CrossRef]
- Di Sante, R. Fibre Optic Sensors for Structural Health Monitoring of Aircraft Composite Structures: Recent Advances and Applications. Sensors 2015, 15, 18666–18713. [Google Scholar] [CrossRef]
- Na, W.S.; Baek, J. Piezoelectric impedance-based non-destructive testing method for possible identification of composite debonding depth. Micromachines 2019, 10, 621. [Google Scholar] [CrossRef] [Green Version]
- Soh, C.K.; Lim, Y.Y. Fatigue damage diagnosis and prognosis using electromechanical impedance technique. In Structural Health Monitoring (SHM) in Aerospace Structures; Yuan, F.-G., Ed.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 429–446. [Google Scholar] [CrossRef]
- Ksica, F.; Hadas, Z.; Hlinka, J. Integration and test of piezocomposite sensors for structure health monitoring in aerospace. Measurement 2019, 147, 106861. [Google Scholar] [CrossRef]
- Qiu, L.; Deng, X.; Yuan, S.; Huang, Y.; Ren, Y. Impact Monitoring for Aircraft Smart Composite Skins Based on a Lightweight Sensor Network and Characteristic Digital Sequences. Sensors 2018, 18, 2218. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Qiu, L.; Luo, Y.; Ding, R. A stretchable and large-scale guided wave sensor network for aircraft smart skin of structural health monitoring. Struct. Health Monit. 2019. [Google Scholar] [CrossRef]
- Gljušćić, P.; Zelenika, S.; Blažević, D.; Kamenar, E. Kinetic Energy Harvesting for Wearable Medical Sensors. Sensors 2019, 19, 4922. [Google Scholar] [CrossRef] [Green Version]
- Technical Characteristics and Spectrum Requirements of Wireless Avionics Intra-Communications System to Support their Safe Operation—M Series: Mobile, Radiodetermination, Amateur and Related satellite Services; Report ITU-R M.2283-0; International Telecommunication Union—Radiocommunication Sector (ITU-R): Geneva, Switzerland, 2014.
- SC-236 Standards for Wireless Avionics Intra-Communication System (WAIC) within 4200-4400 MHz. Available online: https://www.rtca.org/content/sc-236 (accessed on 26 July 2020).
- Fang, K.; Liu, C.; Teng, J. Cluster-based optimal wireless sensor deployment for structural health monitoring. Struct. Health Monit. 2018, 17, 266–278. [Google Scholar] [CrossRef]
- Kazmierski, T.J.; Beeby, S. (Eds.) Energy Harvesting Systems: Principles Modeling and Applications; Springer: New York, NY, USA, 2011; ISBN 978-1-4419-7565-2. [Google Scholar] [CrossRef]
- Priya, S.; Inman, D.J. (Eds.) Energy Harvesting Technologies; Springer: New York, NY, USA, 2009; ISBN 978-0-387-76463-4. [Google Scholar] [CrossRef]
- Somà, A.; De Pasquale, G. Electro-mechanical coupled design of self-powered sensing systems and performances comparison through experiments. Frattura ed Integrità Strutturale 2013, 23, 94–102. [Google Scholar] [CrossRef] [Green Version]
- Tan, Y.K. Energy Harvesting Autonomous Sensor Systems: Design, Analysis, and Practical Implementation; CRC Press: Boca Raton, IL, USA, 2013; ISBN 978-1-4398-9273-2. [Google Scholar]
- Guidelines for Implementation of Structural Health Monitoring on Fixed Wing Aircraft. Aerospace Industry Steering Committee on Structural Health; SAE International: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Bashir, M.; Rajendran, P.; Khan, S.A. Energy Harvesting from Aerodynamic Instabilities: Current Prospect and Future Trends. IOP Conf. Ser. Mat. Sci. 2018, 290, 012054. [Google Scholar] [CrossRef]
- Le, M.Q.; Capsal, J.-F.; Lallart, M.; Hebrard, Y.; Van Der Ham, A.; Reffe, N.; Geynet, L.; Cottinet, P.-J. Review on energy harvesting for structural health monitoring in aeronautical applications. Progr. Aerosp. Sci. 2015, 79, 147–157. [Google Scholar] [CrossRef]
- Vankecke, C.; Assouère, L.; Wang, A.; Durand-Estèbe, P.; Caignet, F.; Dilhac, J.M.; Bafleur, M. Multisource and battery-free energy harvesting architecture for aeronautics applications. IEEE Trans. Power Electron. 2015, 30, 3215–3227. [Google Scholar] [CrossRef]
- Arms, S.W.; Galbreath, J.H.; Townsend, C.P.; Churchill, D.L.; Corneau, B.; Ketcham, R.P.; Phan, N. Energy harvesting wireless sensors and networked timing synchronization for aircraft structural health monitoring. In Proceedings of the 1st International Conference on Wireless Communication, Vehicular Technology, Information Theory and Aerospace & Electronic Systems Technology, Aalborg, Denmark, 17–20 May 2009. [Google Scholar] [CrossRef]
- Tang, X.; Wang, X.; Cattley, R.; Gu, F.; Ball, A.D. Energy Harvesting Technologies for Achieving Self-Powered Wireless Sensor Networks in Machine Condition Monitoring: A Review. Sensors 2018, 18, 4113. [Google Scholar] [CrossRef] [Green Version]
- Sundriyal, P.; Bhattacharya, S. Energy harvesting techniques for powering wireless sensor networks in aircraft applications: A review. In Sensors for Automotive and Aerospace Applications; Bhattacharya, S., Agarwal, A., Prakash, O., Singh, S., Eds.; Springer: Berlin, Germany, 2019; pp. 55–76. [Google Scholar] [CrossRef]
- Wood, O.J.; Featherston, C.A.; Kennedy, D.; Eaton, M.; Pullin, R. Optimised Vibration Energy Harvesting for Aerospace Applications. Key Eng. Mater. 2012, 518, 246–260. [Google Scholar] [CrossRef]
- Boisseau, S.; Despesse, G.; Seddik, B.A. Electrostatic Conversion for Vibration Energy Harvesting. In Small-Scale Energy Harvesting; Lallart, M., Ed.; InTech: London, UK, 2012. [Google Scholar] [CrossRef]
- Wang, Z.; Lin, L.; Chen, J.; Niu, S.; Zi, Y. Triboelectric Nanogenerators; Springer Nature: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Wei, C.; Jing, X. A comprehensive review on vibration energy harvesting: Modelling and realization. Renew. Sustain. Energy Rev. 2017, 74, 1–18. [Google Scholar] [CrossRef]
- Williams, C.B.; Yates, R.B. Analysis of a micro-electric generator for microsystems. Sens. Actuators A-Phys. 1996, 52, 8–11. [Google Scholar] [CrossRef]
- Hadas, Z.; Ondrusek, C.; Singule, V. Power sensitivity of vibration energy harvester. Microsyst. Tecnol. 2010, 16, 691–702. [Google Scholar] [CrossRef]
- Akbar, M.; Curiel-Sosa, J.L. Piezoelectric energy harvester composite under dynamic bending with implementation to aircraft wingbox structure. Compos. Struct. 2016, 153, 193–203. [Google Scholar] [CrossRef]
- Lee, S.; Youn, B.D. A new piezoelectric energy harvesting design concept: Multimodal energy harvesting skin. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 629–645. [Google Scholar] [CrossRef]
- Bowen, C.R.; Kim, H.A.; Weaver, P.M.; Dunn, S. Piezoelectric and ferroelectric materials and structures for energy harvesting applications. Energy Environ. Sci. 2014, 7, 25–44. [Google Scholar] [CrossRef] [Green Version]
- Ambrosio, R.; Jimenez, A.; Mireles, J.; Moreno, M.; Monfil, K.; Heredia, H. Study of Piezoelectric Energy Harvesting System Based on PZT. Integr. Ferroelectr. 2011, 126, 77–86. [Google Scholar] [CrossRef]
- James, E.P.; Tudor, M.J.; Beeby, S.P.; Harris, N.R.; Glynne-Jones, P.; Ross, J.N.; White, N.M. An investigation of self-powered systems for condition monitoring applications. Sens. Actuators A-Phys. 2004, 110, 171–176. [Google Scholar] [CrossRef]
- Hadas, Z.; Smilek, J.; Rubes, O. Analyses of electromagnetic and piezoelectric systems for efficient vibration energy harvesting. In Smart Sensors, Actuators, and MEMS VIII, Proc SPIE Microtechnologies; Fonseca, L., Prunnila, M., Peiner, E., Eds.; SPIE: Bellingham, WA, USA, 2017. [Google Scholar] [CrossRef]
- Khaligh, A. Kinetic Energy Harvesting Using Piezoelectric and Electromagnetic Technologies—State of the Art. IEEE Trans. Ind. Electron. 2010, 57, 850–860. [Google Scholar] [CrossRef]
- Kim, S.; Vyas, R.; Bito, J.; Niotaki, K.; Collado, A.; Georgiadis, A.; Tentzeris, M.M. Ambient RF Energy-Harvesting Technologies for Self-Sustainable Standalone Wireless Sensor Platforms. Proc. IEEE 2014, 102, 1649–1666. [Google Scholar] [CrossRef]
- Beeby, S.; White, N. (Eds.) Energy Harvesting for Autonomous Systems; Artech House: Norwood, MA, USA, 2010; ISBN 978-1-59693-718-5. [Google Scholar]
- Basseville, M.; Benveniste, A.; Goursat, M.; Meve, L. In-Flight Vibration Monitoring of Aeronautical Structures. IEEE Control Syst. Mag. 2007, 27, 27–42. [Google Scholar] [CrossRef]
- Hadas, Z.; Vetiska, V.; Vetiska, J.; Krejsa, J. Analysis and efficiency measurement of electromagnetic vibration energy harvesting system. Microsyst. Technol. 2016, 22, 1767–1779. [Google Scholar] [CrossRef]
- Dunno, K.; Batt, G. Analysis of in-flight vibration of a twin-engine turbo propeller aircraft. Packag. Technol. Sci. 2009, 22, 479–485. [Google Scholar] [CrossRef]
- Pearson, M.; Featherston, C.A.; Pullin, R.; Holford, K.M. Optimized Placement of Parasitic Vibration Energy Harvesters for Autonomous Structural Health Monitoring. J. Intell. Mater. Syst. Struct. 2020, 31, 1403–1415. [Google Scholar] [CrossRef]
- Caliò, R.; Rongala, U.B.; Camboni, D.; Milazzo, M.; Stefanini, C.; De Petris, G.; Oddo, C.M. Piezoelectric Energy Harvesting Solutions. Sensors 2014, 14, 4755–4790. [Google Scholar] [CrossRef] [Green Version]
- Dhakar, L.; Liu, H.; Tay, F.E.H.; Lee, C. A new energy harvester design for high power output at low frequencies. Sens. Actuators A Phys. 2013, 199, 344–352. [Google Scholar] [CrossRef]
- Du, S.; Jia, Y.; Zhao, C.; Amaratunga, G.A.J.; Seshia, A.A. A Nail-size Piezoelectric Energy Harvesting System Integrating a MEMS Transducer and a CMOS Interface Circuit. IEEE Sens. J. 2020, 20, 277–285. [Google Scholar] [CrossRef] [Green Version]
- Aboulfotoh, N.A.; Arafa, M.H.; Megahed, S.M. A self-tuning resonator for vibration energy harvesting. Sens. Actuators A Phys. 2013, 201, 328–334. [Google Scholar] [CrossRef]
- Xu, Z.; Shan, X.; Chen, D.; Xie, T. A Novel Tunable Multi-Frequency Hybrid Vibration Energy Harvester Using Piezoelectric and Electromagnetic Conversion Mechanisms. Appl. Sci. 2016, 6, 10. [Google Scholar] [CrossRef] [Green Version]
- Soliman, M.S.M.; Abdel-Rahman, E.M.; El-Saadany, E.F.; Mansour, R.R. A wideband vibration-based energy harvester. J. Micromech. Microeng. 2008, 18, 115021. [Google Scholar] [CrossRef]
- Barton, D.A.W.; Burrow, S.G.; Clare, L.R. Energy Harvesting From Vibrations with a Nonlinear Oscillator. J. Vib. Acoust. 2010, 132, 021009. [Google Scholar] [CrossRef]
- Cottone, F.; Vocca, H.; Gammaitoni, L. Nonlinear Energy Harvesting. Phys. Rev. Lett. 2009, 102, 080601. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rubes, O.; Brablc, M.; Hadas, Z. Verified nonlinear model of piezoelectric energy harvester. In Proceedings of the 14th International Conference on Vibration Engineering and Technology of Machinery (VETOMAC XIV), Lisbon, Portugal, 10–13 September 2018. [Google Scholar] [CrossRef]
- Sebald, G.; Kuwano, H.; Guyomar, D.; Ducharne, B. Experimental Duffing oscillator for broadband piezoelectric energy harvesting. Smart Mater. Struct. 2011, 20, 075022. [Google Scholar] [CrossRef]
- Benasciutti, D.; Moro, L.; Zelenika, S.; Brusa, E. Vibration energy scavenging via piezoelectric bimorphs of optimized shapes. Microsyst. Technol. 2009, 16, 657–668. [Google Scholar] [CrossRef]
- Shahruz, S.M. Limits of performance of mechanical band-pass filters used in energy scavenging. J. Sound. Vib. 2006, 293, 449–461. [Google Scholar] [CrossRef]
- Gljušćić, P.; Zelenika, S. Assessment of performances of optimized piezoelectric energy harvesters for wearables. In Proceedings of the 20th EUSPEN International Conference, Geneva, Switzerland, 8–11 June 2020; pp. 49–52. [Google Scholar]
- Yang, Z.; Wang, Y.Q.; Zuo, L.; Zu, J. Introducing arc-shaped piezoelectric elements into energy harvesters. Energy Convers. Manag. 2017, 148, 260–266. [Google Scholar] [CrossRef]
- Erturk, A.; Inman, D.J. Broadband piezoelectric power generation on high-energy orbits of the bistable Duffing oscillator with electromechanical coupling. J. Sound. Vib. 2011, 330, 2339–2353. [Google Scholar] [CrossRef]
- Harne, R.L.; Wang, K.W. A review of the recent research on vibration energy harvesting via bistable systems. Smart Mater. Struct. 2013, 22, 023001. [Google Scholar] [CrossRef]
- Pellegrini, S.P.; Tolou, N.; Schenk, M.; Herder, J.L. Bistable vibration energy harvesters: A review. J. Intell. Mater. Syst. Struct. 2013, 24, 1303–1312. [Google Scholar] [CrossRef]
- Vocca, H.; Neri, I.; Travasso, F.; Gammaitoni, L. Kinetic energy harvesting with bistable oscillators. Appl. Energy 2012, 97, 771–776. [Google Scholar] [CrossRef]
- Zheng, R.; Nakano, K.; Hu, H.; Su, D.; Cartmell, M.P. An application of stochastic resonance for energy harvesting in a bistable vibrating system. J. Sound. Vib. 2014, 333, 2568–2587. [Google Scholar] [CrossRef]
- Leng, Y.G.; Gao, Y.J.; Tan, D.; Fan, S.B.; Lai, Z.H. An elastic-support model for enhanced bistable piezoelectric energy harvesting from random vibrations. J. Appl. Phys. 2015, 117, 064901. [Google Scholar] [CrossRef]
- Rubes, O.; Hadas, Z. Design and Simulation of Bistable Piezoceramic Cantilever for Energy Harvesting from Slow Swinging Movement. In Proceedings of the IEEE 18th International Power Electronics and Motion Control Conference, Budapest, Hungary, 26–30 August 2018; pp. 663–668. [Google Scholar] [CrossRef]
- Stanton, S.C.; McGehee, C.C.; Mann, B.P. Nonlinear dynamics for broadband energy harvesting: Investigation of a bistable piezoelectric inertial generator. Phys. D 2010, 239, 640–653. [Google Scholar] [CrossRef]
- Pozzi, M.; Guo, S.; Zhu, M. Harvesting energy from the dynamic deformation of an aircraft wing under gust loading. In Proceedings of the SPIE 8348: Health Monitoring of Structural and Biological Systems, San Diego, CA, USA, 12–15 April 2012. 834831. [Google Scholar] [CrossRef] [Green Version]
- Pozzi, M.; Almond, H.J.A.; Leighton, G.J.T.; Moriarty, R.J. Low-profile and wearable energy harvester based on plucked piezoelectric cantilevers. In Proceedings of the SPIE 9517: Smart Sensors, Actuators, and MEMS and Cyber Physical Systems, Barcelona, Spain, 21 May 2015. 951706. [Google Scholar] [CrossRef] [Green Version]
- Cavallier, B.; Berthelot, P.; Nouira, H.; Foltete, E.; Hirsinger, L.; Ballandras, S. Energy harvesting using vibrating structures excited by shock. In Proceedings of the IEEE Ultrasonics Symposium, Piscataway, NJ, USA, 18–21 September 2005; Volume 2, pp. 943–945. [Google Scholar] [CrossRef]
- Kuang, Y.; Zhu, M. Design study of a mechanically plucked piezoelectric energy harvester using validated finite element modelling. Sens. Actuators A-Phys. 2017, 263, 510–520. [Google Scholar] [CrossRef]
- Kamenar, E.; Zelenika, S.; Blažević, D.; Maćešić, S.; Gregov, G.; Marković, K.; Glažar, V. Harvesting of river flow energy for wireless sensor network technology. Microsyst. Technol. 2016, 22, 1557–1574. [Google Scholar] [CrossRef]
- CEDRAT TECHNOLOGIES: Amplified Piezo Actuators. Available online: https://www.cedrat-technologies.com/en/products/actuators/amplified-piezo-actuators.html (accessed on 5 August 2020).
- Jiang, X.; Li, Y.; Li, J.; Wang, J.; Yao, J. Piezoelectric energy harvesting from traffic-induced pavement vibrations. J. Renew. Sustain. Energy 2014, 6, 043110. [Google Scholar] [CrossRef]
- Xu, C.; Ren, B.; Di, W.; Liang, Z.; Jiao, J.; Li, L.; Zhao, X.; Luo, H.; Wang, D. Cantilever driving low frequency piezoelectric energy harvester using single crystal material 0.71Pb(Mg1/3 Nb2/3)O3-0.29PbTiO3. Appl. Phys. Lett. 2012, 101, 033502. [Google Scholar] [CrossRef]
- Yang, Z.; Zu, J.; Luo, J.; Peng, Y. Modeling and parametric study of a force-amplified compressive-mode piezoelectric energy harvester. J. Intell. Mater. Syst. Struct. 2017, 28, 357–366. [Google Scholar] [CrossRef]
- Beeby, S.P.; Torah, R.N.; Tudor, M.J.; Glynne-Jones, P.; O’Donnell, T.; Saha, C.R.; Roy, S. A micro electromagnetic generator for vibration energy harvesting. J. Micromech. Microeng. 2007, 17, 1257. [Google Scholar] [CrossRef]
- Hadas, Z.; Kluge, M.; Singule, V.; Ondrusek, C. Electromagnetic Vibration Power Generator. In Proceedings of the IEEE Int Sym Diagnostics for Electric Machines, Power Electronics and Drives, Cracow, Poland, 6–8 September 2007; pp. 451–455. [Google Scholar] [CrossRef]
- Hadas, Z.; Zouhar, J.; Singule, V.; Ondrusek, C. Design of energy harvesting generator base on rapid prototyping parts. In Proceedings of the IEEE 13th International Power Electronics and Motion Control Conference, Poznan, Poland, 1–3 September 2008; pp. 1665–1669. [Google Scholar] [CrossRef]
- Hadas, Z.; Vetiska, V.; Huzlik, R.; Singule, V. Model-based design and test of vibration energy harvester for aircraft application. Microsyst. Tecnol. 2014, 20, 831–843. [Google Scholar] [CrossRef]
- Rubes, O.; Smilek, J.; Hadas, Z. Development of vibration energy harvester fabricated by rapid prototyping technology. In Proceedings of the IEEE 16th International Conference on Mechatronics—Mechatronika, Brno, Czech Republic, 3–5 December 2014; pp. 178–182. [Google Scholar] [CrossRef]
- Churchill, D.L.; DiStasi, S.; Frattini, T.; Wells, D.M. Development of a helicopter on-rotor hum system powered by vibration energy harvesting. In Proceedings of the IEEE 40th European Rotorcraft Forum, Southampton, UK, 2–5 September 2014; Volume 2, pp. 988–1001. [Google Scholar]
- Cepnik, C.; Lausecker, R.; Wallrabe, U. Review on Electrodynamic Energy Harvesters—A Classification Approach. Micromachines 2013, 4, 168–196. [Google Scholar] [CrossRef] [Green Version]
- Kaleta, J.; Kot, K.; Mech, R.; Wiewiorski, P. The Use of Magnetostrictive Cores for the Vibrations Generation and Energy Harvesting from Vibration, in the Selected Frequencies of Work. Key Eng. Mater. 2014, 598, 75–80. [Google Scholar] [CrossRef]
- Wang, L.; Yuan, F.G. Vibration energy harvesting by magnetostrictive material. Smart Mater. Struct. 2008, 17, 045009. [Google Scholar] [CrossRef]
- Zucca, M.; Bottauscio, O. Hysteretic Modeling of Electrical Micro-Power Generators Based on Villari Effect. IEEE Trans. Magn. 2012, 48, 3092–3095. [Google Scholar] [CrossRef]
- Davino, D.; Giustiniani, A.; Visone, C.; Adly, A. Experimental analysis of vibrations damping due to magnetostrictive based energy harvesting. J. Appl. Phys. 2011, 109, 07E509. [Google Scholar] [CrossRef]
- Ueno, T.; Yamada, S. Performance of Energy Harvester Using Iron–Gallium Alloy in Free Vibration. IEEE Trans. Magn. 2011, 47, 2407–2409. [Google Scholar] [CrossRef]
- Xie, H.; Huang, Z.; Guo, S.; Torru, E. Feasibility of an Electrostatic Energy Harvesting Device for CFCs Aircraft. Procedia Eng. 2015, 99, 1213–1222. [Google Scholar] [CrossRef] [Green Version]
- Kiziroglou, M.E.; Becker, T.; Yeatman, E.M.; Schmid, U.; Evans, J.W.; Wright, P.K. Comparison of methods for static charge energy harvesting on aircraft. In Smart Sensors, Actuators, and MEMS VIII, Proc SPIE Microtechnologies; Fonseca, L., Prunnila, M., Peiner, E., Eds.; SPIE: Bellingham, WA, USA, 2017. [Google Scholar] [CrossRef] [Green Version]
- Zi, Y.; Niu, S.; Wang, J.; Wen, Z.; Tang, W.; Wang, Z.L. Standards and figure-of-merits for quantifying the performance of triboelectric nanogenerators. Nat. Commun. 2015, 6, 8376. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, G.; Yang, W.; Jing, Q.; Bai, P.; Yang, Y.; Hou, T.-C.; Wang, Z.L. Harmonic-Resonator-Based Triboelectric Nanogenerator as a Sustainable Power Source and a Self-Powered Active Vibration Sensor. Adv. Mater. 2013, 25, 6094–6099. [Google Scholar] [CrossRef]
- Wen, X.; Yang, W.; Jing, Q.; Wang, Z.L. Harvesting Broadband Kinetic Impact Energy from Mechanical Triggering/Vibration and Water Waves. ACS Nano 2014, 8, 7405–7412. [Google Scholar] [CrossRef] [PubMed]
- Yang, W.; Chen, J.; Jing, Q.; Yang, J.; Wen, X.; Su, Y.; Zhu, G.; Bai, P.; Wang, Z.L. 3D Stack Integrated Triboelectric Nanogenerator for Harvesting Vibration Energy. Adv. Funct. Mater. 2014, 24, 4090–4096. [Google Scholar] [CrossRef]
- Zhang, L.; Jin, L.; Zhang, B.; Deng, W.; Pan, H.; Tang, J.; Zhu, M.; Yang, W. Multifunctional triboelectric nanogenerator based on porous micro-nickel foam to harvest mechanical energy. Nano. Energy 2015, 16, 516–523. [Google Scholar] [CrossRef]
- Dagdeviren, C.; Joe, P.; Tuzman, O.L.; Park, K.-I.; Lee, K.J.; Shi, Y.; Huang, Y.; Rogers, J.A. Recent progress in flexible and stretchable piezoelectric devices for mechanical energy harvesting, sensing and actuation. Extrem Mech. Lett. 2016, 9, 269–281. [Google Scholar] [CrossRef] [Green Version]
- Arrieta, A.F.; Hagedorn, P.; Erturk, A.; Inman, D.J. A piezoelectric bistable plate for nonlinear broadband energy harvesting. Appl. Phys. Lett. 2010, 97, 104102. [Google Scholar] [CrossRef] [Green Version]
- Hadas, Z.; Ksica, F.; Rubes, O. Piezoceramic patches for energy harvesting and sensing purposes. Eur. Phys. J. Spec. Top. 2019, 228, 1589–1604. [Google Scholar] [CrossRef]
- Erturk, A. Piezoelectric energy harvesting for civil infrastructure system applications: Moving loads and surface strain fluctuations. J. Intell. Mater. Syst. Struct. 2011, 22, 1959–1973. [Google Scholar] [CrossRef]
- Saporito, M.; Da Ronch, A. Aeroelastic energy harvesting from statistically representative gust encounters. J. Fluids Struct. 2020, 94, 102869. [Google Scholar] [CrossRef]
- Matt, H.M.; di Scalea, F.L. Macro-fiber composite piezoelectric rosettes for acoustic source location in complex structures. Smart Mater. Struct. 2007, 16, 1489–1499. [Google Scholar] [CrossRef]
- Kovalovs, A.; Barkanov, E.; Gluhihs, S. Active control of structures using macro-fiber composite (MFC). J. Phys. Conf. Ser. 2007, 93, 012034. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, L.; Li, H. Vibration energy harvesting using macro-fiber composites. Smart Mater. Struct. 2009, 18, 115025. [Google Scholar] [CrossRef]
- Ksica, F.; Behal, J.; Rubes, O.; Hadas, Z. Homogenized Model of Piezoelectric Composite Structure for Sensing Purposes. In Advances in Intelligent Systems and Computing―Vol. 1044, Proc Mechatronics 2019: Recent Advances towards Industry 4.0; Szewczyk, R., Krejsa, J., Nowicki, M., Ostaszewska-Lizewska, A., Eds.; Springer Nature: London, UK, 2020; pp. 358–365. [Google Scholar] [CrossRef]
- Nielsen, B.B.; Nielsen, M.S.; Santos, I.F. A layered shell containing patches of piezoelectric fibers and interdigitated electrodes: Finite element modeling and experimental validation. J. Intell. Mater. Syst. Struct. 2017, 28, 78–96. [Google Scholar] [CrossRef]
- Featherston, C.A.; Holford, K.M.; Greaves, B. Harvesting Vibration Energy for Structural Health Monitoring in Aircraft. Key Eng. Mater. 2009, 413–414, 439–446. [Google Scholar] [CrossRef]
- Takezawa, A.; Kitamura, M.; Vatanabe, S.L.; Silva, E.C.N. Design methodology of piezoelectric energy-harvesting skin using topology optimization. Struct. Multidiscip. Optim. 2014, 49, 281–297. [Google Scholar] [CrossRef] [Green Version]
- Sappati, K.K.; Bhadra, S. Piezoelectric polymer and paper substrates: A review. Sensors 2018, 18, 3605. [Google Scholar] [CrossRef] [Green Version]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef]
- Zhang, X.; Wu, L.; Sessler, G.M. Energy harvesting from vibration with cross-linked polypropylene piezoelectrets. AIP Adv. 2015, 5, 077185. [Google Scholar] [CrossRef] [Green Version]
- Mrlík, M.; Leadenham, S.; AlMaadeed, M.A.; Erturk, A. Figure of merit comparison of PP-based electret and PVDF-based piezoelectric polymer energy harvesters. In Proceedings of the SPIE 9799: Active and Passive Smart Structures and Integrated Systems, Las Vegas, NE, USA, 20–24 March 2016. 979923. [Google Scholar] [CrossRef] [Green Version]
- Karan, S.K.; Bera, R.; Paria, S.; Das, A.K.; Maiti, S.; Maitra, A.; Khatua, B. An Approach to Design Highly Durable Piezoelectric Nanogenerator Based on Self-Poled PVDF/AlO-rGO Flexible Nanocomposite with High Power Density and Energy Conversion Efficiency. Adv. Energy Mater. 2016, 6, 1601016. [Google Scholar] [CrossRef]
- Layek, R.K.; Samanta, S.; Chatterjee, D.P.; Nandi, A.K. Physical and mechanical properties of poly(methyl methacrylate) -functionalized graphene/poly(vinylidine fluoride) nanocomposites: Piezoelectric β polymorph formation. Polymer 2010, 51, 5846–5856. [Google Scholar] [CrossRef]
- Fang, K.Y.; Fang, F.; Wang, S.W.; Yang, W.; Sun, W.; Li, J.F. Hybridizing CNT/PMMA/PVDF towards high-performance piezoelectric nanofibers. J. Phys. D Appl. Phys. 2018, 51, 265305. [Google Scholar] [CrossRef]
- Xu, D.; Zhang, H.; Pu, L.; Li, L. Fabrication of Poly(vinylidene fluoride)/Multiwalled carbon nanotube nanocomposite foam via supercritical fluid carbon dioxide: Synergistic enhancement of piezoelectric and mechanical properties. Compos. Sci. Technol. 2020, 192, 108108. [Google Scholar] [CrossRef]
- Chew, Z.J.; Ruan, T.; Zhu, M. Strain Energy Harvesting Powered Wireless Sensor Node for Aircraft Structural Health Monitoring. Procedia Eng. 2016, 168, 1717–1720. [Google Scholar] [CrossRef] [Green Version]
- Shi, Y.; Hallett, S.R.; Zhu, M. Energy harvesting behaviour for aircraft composites structures using macro-fibre composite: Part I—Integration and experiment. Compos. Struct. 2017, 160, 1279–1286. [Google Scholar] [CrossRef] [Green Version]
- Meyer, Y.; Lachat, R.; Akhras, G. A review of manufacturing techniques of smart composite structures with embedded bulk piezoelectric transducers. Smart. Mater. Struct. 2019, 28, 053001. [Google Scholar] [CrossRef]
- Roundy, S. On the Effectiveness of Vibration-based Energy Harvesting. J. Intell. Mater. Syst. Struct. 2005, 16, 809–823. [Google Scholar] [CrossRef]
- Najafi, K.; Galchev, T.; Aktakka, E.E.; Peterson, R.L.; McCullagh, J. Microsystems for energy harvesting. In Proceedings of the 16th International Solid-State Sensors, Actuators and Microsystems Conference (TRANSDUCERS’11), Beijing, China, 5–9 June 2011; pp. 1845–1850. [Google Scholar] [CrossRef]
- Ruan, J.J.; Lockhart, R.A.; Janphuang, P.; Quintero, A.V.; Briand, D.; De Rooij, N. An automatic test bench for complete characterization of vibration-energy harvesters. IEEE Trans. Instrum. Meas. 2013, 62, 2966–2973. [Google Scholar] [CrossRef]
- Mallick, D.; Amann, A.; Roy, S. Interplay between electrical and mechanical domains in a high performance nonlinear energy harvester. Smart Mater. Struct. 2015, 24, 122001. [Google Scholar] [CrossRef]
- Freer, R.; Powell, A.V. Realising the potential of thermoelectric technology: A Roadmap. J. Mater. Chem. C 2020, 8, 441–463. [Google Scholar] [CrossRef]
- Rowe, D.M. (Ed.) CRC Handbook of Thermoelectrics; CRC Press: Boca Raton, FL, USA, 1995; ISBN 978-1-315-21969-1. [Google Scholar]
- Snyder, G.J.; Toberer, E.S. Complex thermoelectric materials. Nat. Mater. 2008, 7, 105–114. [Google Scholar] [CrossRef]
- El-Desouky, A.; Carter, M.; Mahmoudi, M.; Elwany, A.; LeBlanc, S. Influences of energy density on microstructure and consolidation of selective laser melted bismuth telluride thermoelectric powder. J. Manuf. Process 2017, 25, 411–417. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, L.-D. Thermoelectric materials: Energy conversion between heat and electricity. J. Mater. 2015, 1, 92–105. [Google Scholar] [CrossRef] [Green Version]
- Han, C.; Li, Z.; Dou, S. Recent progress in thermoelectric materials. Chin. Sci. Bull. 2014, 59, 2073–2091. [Google Scholar] [CrossRef] [Green Version]
- Elefsiniotis, A. Energy Harvesting Modules for Aircraft Specific Wireless Sensor Nodes. Doctoral Dissertation, Vienna University of Technology, Vienna, Austria, 2015. [Google Scholar]
- Becker, T.; Elefsiniotis, A.; Kiziroglou, M.E. Thermoelectric Energy Harvesting in Aircraft. In Micro Energy Harvesting; Briand, D., Yeatman, E., Roundy, S., Eds.; Wiley-VCH Verlag: Weinheim, Germany, 2015; pp. 415–434. [Google Scholar] [CrossRef]
- González, C.; Homero, J. Conduction of Profitability Analyses in Research and Development Projects. Master’s Thesis, Technical University of Hamburg, Hamburg, Germany, 2013. [Google Scholar]
- Kowalewski, P. Cost-Benefit Analysis of Wireless Sensor Networks and Energy Harvesting. Master’s Thesis, Fachhochschule Wedel, Wedel, Germany, 2012. [Google Scholar]
- Ziolkowski, P.; Zabrocki, K.; Müller, E. TEG Design for Waste Heat Recovery at an Aviation Jet Engine Nozzle. Appl. Sci. 2018, 8, 2637. [Google Scholar] [CrossRef] [Green Version]
- Ahmidina, S.S.A.; Sakri, F.M.; Sarip, A.R.M. Harvesting Energy from an Exhaust System using High Temperature Thermoelectric Material. Test. Eng. Manag. 2020, 82, 1997–2002. [Google Scholar]
- Bode, C.; Friedrichs, J.; Somdalen, R.; Köhler, J.; Büchter, K.-D.; Falter, C.; Kling, U.; Ziolkowski, P.; Zabrocki, K.; Müller, E.; et al. Potential of future thermoelectric energy recuperation for aviation. J. Eng. Gas. Turb. Power 2017, 139, 101201. [Google Scholar] [CrossRef]
- Elefsiniotis, A.; Kokorakis, N.; Becker, T.; Schmid, U. A Novel High-temperature Aircraft-specific Energy Harvester Using PCMs and State of the art TEGs. Mater. Today-Proc. 2015, 2, 814–822. [Google Scholar] [CrossRef]
- Janak, L.; Ancik, Z.; Vetiska, J.; Hadas, Z. Thermoelectric Generator Based on MEMS Module as an Electric Power Backup in Aerospace Applications. Mater. Today 2015, 2, 865–870. [Google Scholar] [CrossRef]
- Han, X.-Y.; Wang, J.; Cheng, H.-F. Investigation of thermoelectric SiC ceramics for energy harvesting applications on supersonic vehicles leading-edges. Bull. Mater. Sci. 2014, 37, 127–132. [Google Scholar] [CrossRef] [Green Version]
- Langley, J.; Taylor, M.; Wagner, G.; Morris, S. Thermoelectric Energy Harvesting from Small Aircraft Engines. SAE Int. Tech. Paper 2009. [Google Scholar] [CrossRef]
- Becker, T.; Kluge, M.; Schalk, J.; Otterpohl, T.; Hilleringmann, U. Power Management for Thermal Energy Harvesting in Aircrafts. In Proceedings of the IEEE Sensors Conference, Lecce, Italy, 26–29 October 2008; pp. 681–684. [Google Scholar] [CrossRef]
- Featherston, C.A.; Holford, K.M.; Waring, G. Thermoelectric Energy Harvesting for Wireless Sensor Systems in Aircraft. Key Eng. Mater. 2009, 413–414, 487–494. [Google Scholar] [CrossRef]
- Lyras, M.; Zymaride, L.; Kyratsi, T.; Louca, L.S.; Becker, T. Simulation based design of a thermoelectric energy harvesting device for aircraft applications. In Proceedings of the ASME 2017 Dynamic Systems and Control Conf, Tysons, VA, USA, 11–13 October 2017. [Google Scholar] [CrossRef]
- Samson, D.; Otterpohl, T.; Kluge, M.; Schmid, U.; Becker, T. Aircraft-Specific Thermoelectric Generator Module. J. Electron. Mater. 2010, 39, 2092–2095. [Google Scholar] [CrossRef]
- Samson, D.; Kluge, M.; Becker, T.; Schmid, U. Energy Harvesting for Autonomous Wireless Sensor Nodes in Aircraft. Procedia Eng. 2010, 5, 1160–1163. [Google Scholar] [CrossRef] [Green Version]
- Elefsiniotis, A.; Kiziroglou, M.E.; Wright, S.W.; Toh, T.T.; Mitcheson, P.D.; Becker, T.; Yeatman, E.M.; Schmid, U. Performance evaluation of a thermoelectric energy harvesting device using various phase change materials. J. Phy. Conf. Ser. 2013, 476, 012020. [Google Scholar] [CrossRef] [Green Version]
- Elefsiniotis, A.; Kokorakis, N.; Becker, T.; Schmid, U. Performance of a low temperature energy harvesting device for powering wireless sensor nodes in aircrafts applications. In Proceedings of the Transducers and Eurosensors XXVII: 17th International Conference on Solid-State Sensors, Actuators and Microsystems, Barcelona, Spain, 16–20 June 2013; pp. 2276–2279. [Google Scholar] [CrossRef]
- Elefsiniotis, A.; Kokorakis, N.; Becker, T.; Schmid, U. A thermoelectric-based energy harvesting module with extended operational temperature range for powering autonomous wireless sensor nodes in aircraft. Sens. Actuators A-Phys 2014, 206, 159–164. [Google Scholar] [CrossRef]
- Kiziroglou, M.E.; Elefsiniotis, A.; Wright, S.W.; Toh, T.T.; Mitcheson, P.D.; Becker, T.; Yeatman, E.M. Performance of phase change materials for heat storage thermoelectric harvesting. Appl. Phys. Lett. 2013, 103, 193902. [Google Scholar] [CrossRef] [Green Version]
- Samson, D.; Kluge, M.; Fuss, T.; Schmid, U.; Becker, T. Flight Test Results of a Thermoelectric Energy Harvester for Aircraft. J. Electron. Mater. 2012, 41, 1134–1137. [Google Scholar] [CrossRef]
- Elefsiniotis, A.; Samson, D.; Becker, T.; Schmid, U. Investigation of the Performance of Thermoelectric Energy Harvesters Under Real Flight Conditions. J. Electron. Mater. 2013, 42, 2301–2305. [Google Scholar] [CrossRef]
- Boccardi, S.; Iervolino, O.; Loisi, G.; Ciampa, F.; Meo, M. A novel heatsink for thermo-electric power harvesting of structural health monitoring systems. In Proceedings of the 11th International Workshop on Structural Health Monitoring 2017: Real-Time Material State Awareness and Data-Driven Safety Assurance, Stanford, CA, USA, 12–14 September 2017; pp. 504–511. [Google Scholar]
- Dilhac, J.-M.; Monthéard, R.; Bafleur, M.; Boitier, V.; Durand-Estebe, P.; Tounsi, P. Implementation of Thermoelectric Generators in Airliners for Powering Battery-Free Wireless Sensor Networks. J. Electron. Mater. 2014, 43, 2444–2451. [Google Scholar] [CrossRef] [Green Version]
- Samson, D.; Kluge, M.; Becker, T.; Schmid, U. Energy harvesting for remote monitoring of aircraft seats. Sens. Lett. 2010, 8, 328–335. [Google Scholar] [CrossRef]
- Romli, F.I.; Salim, S.M. Preliminary Study of Passengers’ Body Heat Harvesting Potential in Commercial Transport Aircraft. Int. J. Eng. Appl. 2020, 8, 32–40. [Google Scholar] [CrossRef]
- Romli, F.I.; Salim, S.M. Factorial Study on Seated Aircraft Passengers’ Body Heat Harvesting. Int. J. Emerg. Trends Eng. Res. 2020, 8, 1309–1314. [Google Scholar] [CrossRef]
- Gljušćić, P.; Zelenika, S.; Kamenar, E. Characterisation of Performances of Thermoelectric Generators for Energy Harvesting Applications. In Proceedings of the 29th DAAAM International Symposium, Zadar, Croatia, 19–22 October 2018; pp. 25–30. [Google Scholar] [CrossRef]
- Kiziroglou, M.E.; Becker, T.; Wright, S.W.; Yeatman, E.M.; Evans, J.W.; Wright, P.K. 3D Printed Insulation for Dynamic Thermoelectric Harvesters with Encapsulated Phase Change Materials. IEEE Sens. Lett. 2017, 1, 5500404. [Google Scholar] [CrossRef] [Green Version]
- Boucher, J.R. Sunrise, the World’s First Solar-Powered Airplane. J. Aircr. 1985, 22, 840–846. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Hou, Z. Solar-powered airplanes: A historical perspective and future challenges. Prog. Aeorsp. Sci. 2014, 71, 36–53. [Google Scholar] [CrossRef]
- Solar Impulse Foundation: Historic Flight. Available online: https://aroundtheworld.solarimpulse.com/ (accessed on 23 July 2020).
- Ramirez-Diaz, G.; Nadal-Mora, V.; Piechocki, J. Descriptive analysis of viability of fuel saving in commercial aircraft through the application of photovoltaic cells. Renew. Sustain. Energy Rev. 2015, 51, 138–152. [Google Scholar] [CrossRef] [Green Version]
- Liscouet-Hanke, S.; Shafiei, A.; Lopes, L.; Williamson, S. Proof-of-concept analysis of a supplemental solar power system for aircraft. Aircr. Eng. Aerosp. Technol. 2018, 90, 1295–1304. [Google Scholar] [CrossRef]
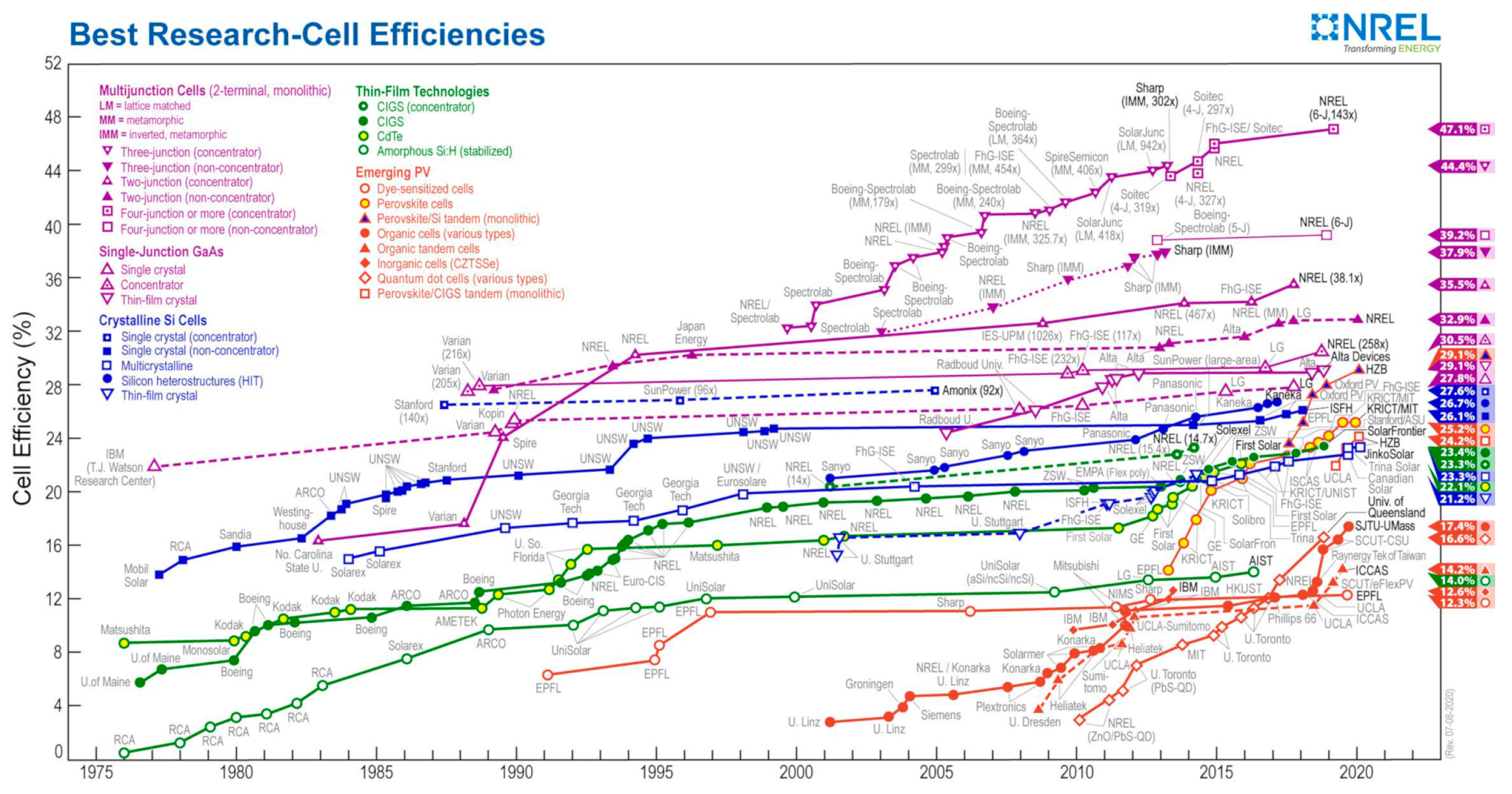
- National Renewable Energy Laboratory (NREL). Chart of the highest confirmed conversion efficiencies for research cells for a range of photovoltaic technologies, plotted from 1976 to the present. Available online: https://www.nrel.gov/pv/cell-efficiency.html (accessed on 27 July 2020).
- Fazelpour, F.; Vafaeipour, M.; Rahbari, O.; Shirmohammadi, R. Considerable parameters of using PV cells for solar-powered aircrafts. Renew. Sustain. Energy Rev. 2013, 22, 81–91. [Google Scholar] [CrossRef]
- Zhu, X.; Guo, Z.; Hou, Z.; Gao, X.; Zhang, J. Parameter’s sensitivity analysis and design optimization of solar-powered airplanes. Aircr. Eng. Aerosp. Technol. 2016, 88, 550–560. [Google Scholar] [CrossRef]
- Aglietti, G.S.; Redi, S.; Tantall, A.R.; Makvart, T. High Altitude Electrical Power Generation. WSEAS Trans. Environ. Dev. 2008, 4, 1067–1077. [Google Scholar]
- Leutenegger, S.; Jabas, M.; Siegwart, R.Y. Solar Airplane Conceptual Design and Performance Estimation. J. Intell. Robot. Syst. 2011, 545–561. [Google Scholar] [CrossRef]
- Rajendran, P.; Smith, H.; Hazim bih Masral, M. Modeling and Simulation of Solar Irradiance and Daylight Duration for a High-Power-Output Solar Module System. Appl. Mech. Mater. 2014, 629, 475–480. [Google Scholar] [CrossRef]
- Soyata, T.; Copeland, L.; Heinzelman, W. RF Energy Harvesting for Embedded Systems: A Survey of Tradeoffs and Methodology. IEEE Circ. Syst. Mag. 2016, 16, 22–57. [Google Scholar] [CrossRef]
- Garcia, M.; Grano, C.; Fermi Guerrero, J.; Ambrosio, R.C.; Moreno, M.; Fermin Guerrero, W.; Mino, G.; Gonzales, V.R. Modeling and simulation of a photovoltaic array for a fixed-wing unmanned aerial vehicle. In Proceedings of the IEEE 43rd Photovoltaic Specialists Conference, Portland, OR, USA, 5–10 June 2016; pp. 2682–2687. [Google Scholar] [CrossRef]
- Lou, B.; Wang, G.; Huang, Z.; Ye, S. Preliminary design and performance analysis of a solar-powered unmanned seaplane. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5606–5617. [Google Scholar] [CrossRef]
- Morton, S.; D’Sa, R.; Papanikolopoulos, N. Solar powered UAV: Design and experiments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 2460–2466. [Google Scholar] [CrossRef]
- Nagata, M.; Baldwin, E.; Kim, S.; Taya, M. Design of dye-sensitized solar cells integrated in composite panel subjected to bending. J. Compos. Mater. 2012, 47, 27–32. [Google Scholar] [CrossRef]
- Chen, X.; Sun, B.; Dai, C.; Wang, X. Wind energy harvesting using jet-edge flow oscillations. AIP Adv. 2018, 8, 095018. [Google Scholar] [CrossRef] [Green Version]
- Orrego, S.; Shoele, K.; Ruas, A.; Doran, K.; Caggiano, B.; Mittal, R.; Kang, S.H. Harvesting ambient wind energy with an inverted piezoelectric flag. Appl. Energy 2017, 194, 212–222. [Google Scholar] [CrossRef]
- Ahmad, I.; Hassan, A.; Anjum, M.U.; Malik, S.; Ali, T. Ambient Acoustic Energy Harvesting using Two Connected Resonators with Piezoelement for Wireless Distributed Sensor Network. Acoust. Phys. 2019, 65, 471–475. [Google Scholar] [CrossRef]
- Yuan, M.; Cao, Z.; Luo, J.; Chou, X. Recent Developments of Acoustic Energy Harvesting: A Review. Micromachines 2019, 10, 48. [Google Scholar] [CrossRef] [Green Version]
- Saad, M.M.M.; Mohd, S.B.; Zulkafli, M.F. A Survey on the Use of Ram Air Turbine in Aircraft. AIP Conf. Proc. 2017, 1831, 020048. [Google Scholar] [CrossRef]
- Burton, T.; Jenkins, N.; Sharpe, D.; Bossanyi, E. Wind Energy Handbook, 2nd ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2011; ISBN 978-0-470-69975-1. [Google Scholar]
- Bryant, M.; Pizzonia, M.; Mehallow, M.; Garcia, E. Energy harvesting for self-powered aerostructure actuation. In Proceedings of the SPIE Smart Structures and Materials & Nondestructive Evaluation and Health Monitoring, Proc SPIE 9057: Active and Passive Smart Structures and Integrated Systems, San Diengo, CA, USA, 9–13 April 2014. 90570E. [Google Scholar] [CrossRef]
- Kwon, S.-D. A T-shaped piezoelectric cantilever for fluid energy harvesting. Appl. Phys. Lett. 2010, 97, 164102. [Google Scholar] [CrossRef]
- Zhou, Z.; Qin, W.; Zhu, P.; Shang, S. Scavenging wind energy by a Y-shaped bi-stable energy harvester with curved wings. Energy 2018, 153, 400–412. [Google Scholar] [CrossRef] [Green Version]
- Cheng, T.; Fu, X.; Liu, W.; Lu, X.; Chen, X.; Wang, Y.; Bao, G. Airfoil-based cantilevered polyvinylidene fluoride layer generator for translating amplified air-flow energy. Renew. Energy 2019, 135, 399–407. [Google Scholar] [CrossRef]
- Shan, X.; Tian, H.; Chen, D.; Xie, T. A curved panel energy harvester for aeroelastic vibration. Appl. Energy 2019, 249, 58–66. [Google Scholar] [CrossRef]
- Tang, X.; Sameer, M.; Mandal, S. Acoustic Wireless Power and Data Telemetry for Structural Health Monitoring. In Proceedings of the 2018 IEEE Sensors Conference, New Delhi, India, 28–31 October 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Zhu, X.; Zhang, T.; Bano, S.; Pan, H.; Qi, L.; Zhang, Z.; Yuan, Y. A renewable low-frequency acoustic energy harvesting noise barrier for high-speed railways using a Helmholtz resonator and a PVDF film. Appl. Energy 2018, 230, 52–61. [Google Scholar] [CrossRef]
- Rezaei, M.; Talebitooti, R.; Friswell, M.I. Efficient acoustic harvesting by deploying magnetic restoring force. Smart Mater. Struct. 2019, 28, 105037. [Google Scholar] [CrossRef]
- Wang, X.; Xu, J.; Ding, J.; Zhao, C.; Huang, Z. A compact and low-frequency acoustic energy harvester using layered acoustic metamaterials. Smart Mater. Struct. 2019, 28, 025035. [Google Scholar] [CrossRef]
- Qi, S.; Oudich, M.; Li, Y.; Assouar, B. Acoustic energy harvesting based on a planar acoustic metamaterial. Appl. Phys. Lett. 2016, 108, 263501. [Google Scholar] [CrossRef]
- Ali, M.; Albasha, L.; Qaddoumi, N. RF energy harvesting for autonomous wireless sensor networks. In Proceedings of the 8th International Conference Design & Technology of Integrated Systems in Nanoscale Era, Abu Dhabi, UAE, 26–28 March 2013; pp. 78–81. [Google Scholar] [CrossRef]
- Luo, Y.; Pu, L.; Wang, G.; Zhao, Y. RF Energy Harvesting Wireless Communications: RF Environment, Device Hardware and Practical Issues. Sensors 2019, 19, 3010. [Google Scholar] [CrossRef] [Green Version]
- Yin, S.; Qu, Z. Rate-Optimal Coding Design in Joint Transfer of Energy and Information. IEEE Commun. Lett. 2015, 19, 715–728. [Google Scholar] [CrossRef]
- Penella-López, M.T.; Gasulla-Forner, M. Radiofrequency Energy Harvesting. In Powering Autonomous Sensors; Springer: Dordrecht, The Netherlands, 2011; ISBN 978-94-007-1572-1. [Google Scholar] [CrossRef] [Green Version]
- Srinaga, N.N.; Vinoy, K.J. Design of a compact dual-band antenna for RF power transfer in an aircraft fuel tank. In Proceedings of the 2015 IEEE Applied Electromagnetics Conference, Guwahati, India, 18–21 December 2015; pp. 1–2. [Google Scholar] [CrossRef]
- Estrada, J.; Ramos, I.; Narayan, A.; Keith, A.; Popovic, Z. RF energy harvester in the proximity of an aircraft radar altimeter. In Proceedings of the 2016 IEEE Wireless Power Transfer Conference, Aveiro, Portugal, 6 May 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Sergiou, C.; Vassiliou, V.; Christou, K. RF Energy Harvesting in Wireless Sensor Networks for Critical Aircraft Systems—An Experimental approach. In Proceedings of the 2016 IEEE Conference on Wireless for Space and Extreme Environments, Aachen, Germany, 26–59 September 2016; pp. 173–183. [Google Scholar] [CrossRef]
- Liu, G.; Mrad, N.; Xiao, G.; Li, Z.; Ban, B. RF-based Power Transmission for Wireless Sensors Nodes. In Proceedings of the Smart Materials, Structures & NDT in Aerospace, Montreal, QC, Canada, 2–4 November 2011. [Google Scholar]
- Álvarez-Carulla, A.; Calomer-Farrarons, J.; López-Sánchez, J.; Miribel-Catalá, P. Piezoelectric Harvester-Based Structural Health Monitoring that Uses a Self-Powered Adaptive Circuit. In Proceedings of the 2015 IEEE Metrology for Aerospace, Benevento, Italy, 3–5 June 2015; pp. 531–535. [Google Scholar] [CrossRef]
- Newell, D.; Duffy, M. Review of Power Conversion and Energy Management for Low-Power, Low-Voltage Energy Harvesting Powered Wireless Sensors. IEEE Trans. Power Electron. 2019, 34, 9794–9805. [Google Scholar] [CrossRef]
- Richelli, A.; Colalongo, L.; Kovacs-Vajna, Z. A Review of DC/DC converters for Ultra Low Voltage Energy Harvesting. J. Low Power Electron. 2016, 12, 138–149. [Google Scholar] [CrossRef]
- Kilani, D.; Mohammad, B.; Alhawari, M.; Saleh, H.; Ismail, M. Power Management for Wearable Electronic Devices; Springer Nature: London, UK, 2020; ISBN 978-3-030-37883-7. [Google Scholar] [CrossRef]
- Dickson, J.F. On-Chip High-Voltage Generation in MNOS Integrated Circuits Using an Improved Voltage Multiplier Technique. IEEE J. Solid-State Circuits 1976, 11, 374–378. [Google Scholar] [CrossRef]
- Tse, C.K.; Wong, S.C.; Chow, M.H.L. On Lossless Switched-Capacitor Power Converters. IEEE Trans. Power Electron. 1995, 10, 286–291. [Google Scholar] [CrossRef]
- Carreon-Bautista, S.; Eladawy, A.; Mohieldin, A.N.; Sánchez-Sinencio, E. Boost Converter with Dynamic Input Impedance Matching for Energy Harvesting with Multi-Array Thermoelectric Generators. IEEE Trans. Ind. Electron. 2014, 61, 5345–5353. [Google Scholar] [CrossRef]
- Alhawari, M.; Mohammad, B.; Saleh, H.; Ismail, M. Energy Harvesting for Self-Powered Wearable Devices; Springer: Cham, Switzerland, 2018; ISBN 978-3-319-62577-5. [Google Scholar] [CrossRef]
- Dell’Anna, F.; Dong, T.; Li, P.; Wen, Y.; Yang, Z.; Casu, M.R.; Azadmehr, M.; Berg, Y. State-of-the-Art Power Management Circuits for Piezoelectric Energy Harvesters. IEEE Circ. Syst. Mag. 2018, 18, 27–48. [Google Scholar] [CrossRef]
- Prasad, R.V.; Devasenapathy, S.; Rao, V.S.; Vazifehdan, J. Reincarnation in the ambiance: Devices and Networks with Energy Harvesting. IEEE Commun. Surv. Tutor. 2014, 16, 195–213. [Google Scholar] [CrossRef] [Green Version]




















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Metric | Expression |
|---|---|---|
| Power density (specific power) (PD) | ||
| [97] | Normalized Power Density (NPD) | |
| [140] | Figure of Merit (FoM) | |
| [141] | Figure of Merit (FoM) | |
| [142] | Normalized Power Integral Density (NPID) | |
Parameters:
| ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zelenika, S.; Hadas, Z.; Bader, S.; Becker, T.; Gljušćić, P.; Hlinka, J.; Janak, L.; Kamenar, E.; Ksica, F.; Kyratsi, T.; et al. Energy Harvesting Technologies for Structural Health Monitoring of Airplane Components—A Review. Sensors 2020, 20, 6685. https://0-doi-org.brum.beds.ac.uk/10.3390/s20226685
Zelenika S, Hadas Z, Bader S, Becker T, Gljušćić P, Hlinka J, Janak L, Kamenar E, Ksica F, Kyratsi T, et al. Energy Harvesting Technologies for Structural Health Monitoring of Airplane Components—A Review. Sensors. 2020; 20(22):6685. https://0-doi-org.brum.beds.ac.uk/10.3390/s20226685
Chicago/Turabian StyleZelenika, Saša, Zdenek Hadas, Sebastian Bader, Thomas Becker, Petar Gljušćić, Jiri Hlinka, Ludek Janak, Ervin Kamenar, Filip Ksica, Theodora Kyratsi, and et al. 2020. "Energy Harvesting Technologies for Structural Health Monitoring of Airplane Components—A Review" Sensors 20, no. 22: 6685. https://0-doi-org.brum.beds.ac.uk/10.3390/s20226685