This section describes the infrastructure where the experiments have been carried out, as well as the different devices and protocol architecture used to carry out the work. It has been configured into four different subsections. Therefore,
Section 3.1 describes the distribution and infrastructure of the SmartLab from UAL.
Section 3.2 makes a brief description of additional devices that have been deployed at the smart-home and also lists the daily activities that have been selected to their recognition.
Section 3.3.2 analyzes the spatial temporal features of different sensors, and finally
Section 3.3 shows the whole deployed architecture and the protocols that have been considered.
3.1. SmartLab from UAL
At UAL, there is wide range of research groups working at The Computer Science department. The Smart Lab of UAL (
Figure 1) is focused on attracting that applied knowledge to develop a space with an innovative technology and artificial intelligence methods to deploy assisting technologies that improve the user’s living conditions. The main interest of developing the smart home was to provide it with Ambient Intelligence (AmI) [
55] so that the home can be sensitive, adaptive, and responsive to human needs, habits, gestures, and emotions. One of the main research lines opened by the Smart Lab is focused on Ambient Assisted Living (AAL) and controlling the habits and health of the elderly people, or people with disabilities.
To enable the Smart Lab, UAL has built a diaphanous flat, where open rooms allow accessibility to people with mobility problems. The Smart Home distribution is a kitchen (
Figure 2), a bathroom (
Figure 3), a bedroom (
Figure 4), a hall, and a living room (
Figure 5). The laboratory also has an articulated bed for people who are ill or have reduced mobility.
It also includes an observation room where students can interact with the house through their computer equipment as well as observe the reactions and living actions of the inhabitants for a wide range of potential experiments such as technical or human ones.
For its configuration and simulation of a domotic environment, the smart lab has implemented several types of KNX compatible intelligent devices. KNX is an OSI-based network communications protocol standard for intelligent buildings. The devices are shown in
Figure 6. These devices are: Lights (normal and dimmed); push buttons (normal and touch); blinds; roller blinds; air conditioning; presence and motion detectors; temperature, humidity, CO
2 and flooding sensors; fire detectors; biometric access control and electric lock; built-in touch screen.
The laboratory additionally consists of the following non-KNX protocols and devices: (i) IP security cameras; (ii) HomeConnect devices for Siemens brand dishwasher, and for the Bosch brand oven, hood, glass-ceramic cooker and washing machine; (iii) Smart ThinQ for the fridge.
In addition to the connection of high quality commercial devices, there is a wireless node that allows any other device to be integrated through TCP/HTTP connectivity by WiFI or ethernet, such as a smart TV.
3.2. Description of Devices to Sense Daily Activities
The Smart home at UAL has, therefore, a wide variety of sensors and actuators capable of performing certain actions automatically without user intervention with the aim of improving the user experience in the home.
However, the devices previously described include domotic capabilities in the smart home, but they are not enough to be able to provide data related to the activity of the user. For this reason, new sensors and devices have been deployed in the smart home. Thus, a low-cost and non-invasive IoT platform (
Figure 7) based on ambient and wearable devices has been integrated [
56]. To implement the system, non-intrusive sensors are deployed in the environment, with the aim of preserving the user’s privacy [
57]. Its main objective is to collect the data provided by the inhabitant when interacting with the environment and to analyze them to detect the activities carried out by him/her. In addition, a web tool in the cloud allows the researcher to subscribe the collected data by means of subscription services based on MQTT (Message Queue Telemetry Transport). The web tool mainly allows the researchers to monitor the state of the home in real time and the activities done by the participants. Among other functions, it also provides a view of historical sensor data and lets the researchers manage the situation of sensors in the rooms. In the future, this system will be deployed in real scenarios such as care homes for the elderly, where the web tool will be accessible to caregivers, family and medical staff.
The sensors deployed in the smart-home to collect data to be processed for activity recognition can be classified into three main groups: passive sensors, wearable sensors and location sensors.
Firstly, the passive sensors were incorporated in the Smart Home. The main common characteristic of the passive sensors at the Smart Home is that their communications to the controller(Raspberry Pi) have been implemented by using Z-Wave and they stay in a static way in the home.
Fibaro Motion Sensor is a Z-Wave Plus compatible multi-sensor device, which incorporates a presence sensor, temperature sensor, light sensor and accelerometer. This sensor is mainly used to detect the presence of a user in a room. In future versions of the system, temperature and light sensors will be considered in order to increase detection accuracy.
In the same way, Fibaro Door/Window Sensor 2 is a wireless, battery powered, Z-Wave Plus compatible magnetic contact sensor. Changing the device’s status will automatically send a signal to the Z-Wave controller and associated devices. This sensor allows us to know the state of an object or element in the house that can be open/closed, such as a door, a drawer or a window.
These sensors are shown in
Figure 8. In this image, they are located on the fridge. The motion sensor activates when a person enters the kitchen and the door/window sensor let us know the state of the freezer.
In addition, Arun PM3 is a binary pressure sensor, in charge of detecting pressure on its surface. This pressure sensor has been used to check when a person sits on a certain surface. Since the connection of this sensor is made through cables, to communicate with the Z-Wave it is necessary to connect by cable the binary pressure sensor to other Z-Wave compatible devices, for example, Door/Window Sensor. In
Figure 9 and
Figure 10 the connection between the pressure and binary sensor is shown. In the Smart Home, these sensors are placed under the sofa. As can be seen in the
Figure 10, the cable connection between the two devices is almost invisible to the inhabitant.
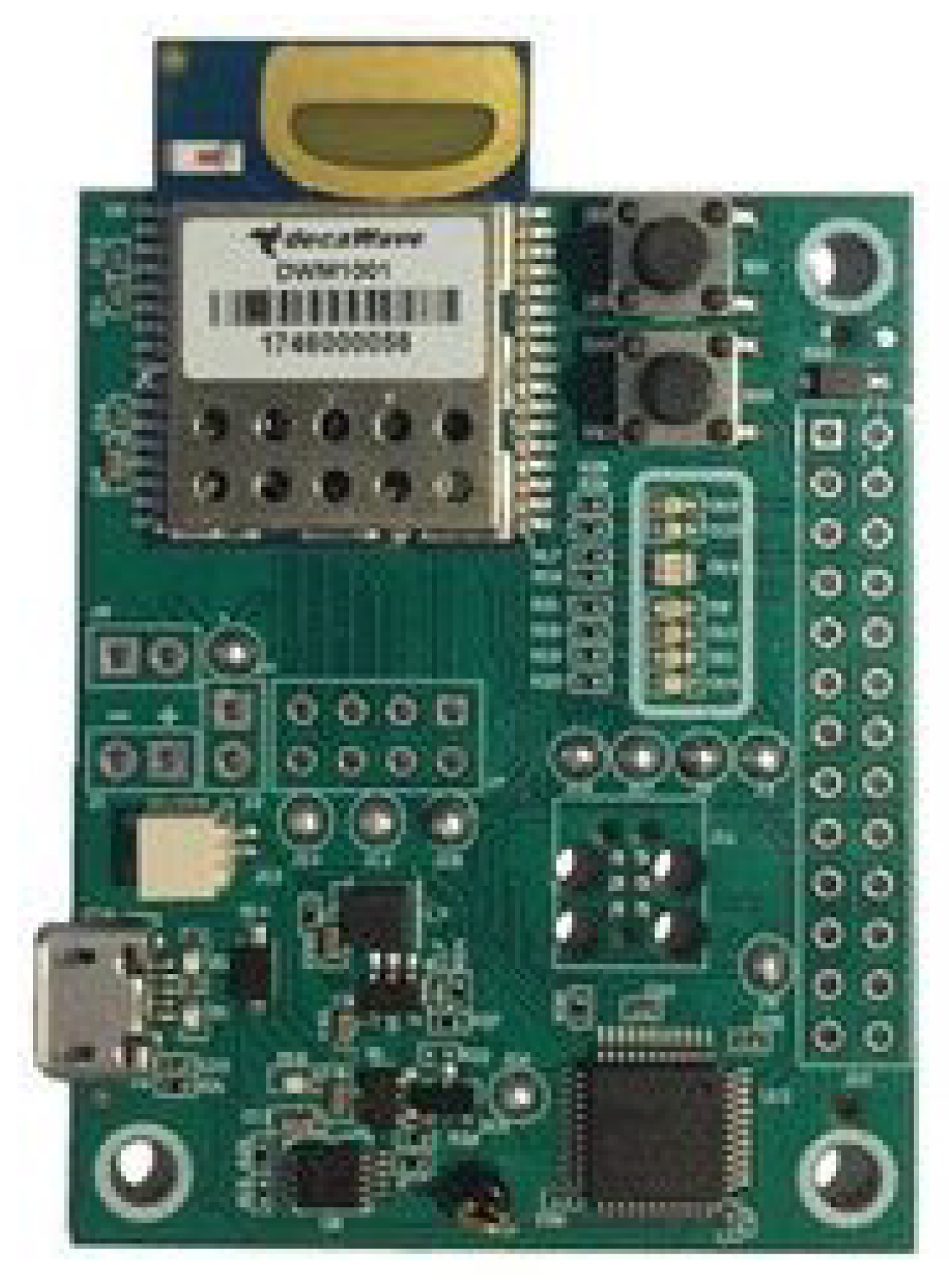
Secondly, as for the location sensors, an RTLS system (Real Time Location System) is installed in the Smart Home. In this case, its communication protocol is UWB (Ultra-Width-Band). Specifically, it incorporates the MDEK1001 Development Kit from the company Decawave. The RTLS network consists of a set of DWM1001 devices (
Figure 11), which can have different roles. One device (
Gateway) is in charge of connecting to a controller element (Raspberry Pi in this case) and acting as a bridge between the RTLS network and the rest of the IoT system. Other devices are incorporated into the house such as
Anchors being fixed in the laboratory to delimit the surface on which the user is monitored. Additionally, other non fixed DWM1001 devices (
Tags) work as wearable devices that are carried by the user. In this way they allow monitoring their location with respect to the
Anchors with a maximal error of 15 cm.
Figure 12 shows the structure of an RTLS network with the devices assuming different roles.
Thirdly, as a wearable device deployed for obtaining acceleration and gyro data from the user when performing certain activities, a smartwatch has been selected (
Figure 13). This device is Polar M600, which has been chosen because of its high popularity in relation to the price-quality ratio and also because of the incorporation of acceleration and gyro sensors and the Android Wear OS, thanks to which it is possible to include our own applications which access these data provided by the sensors.
Finally,
Figure 14 shows the deployment of the different types of sensors in the Smart Home.
In
Table 1 the total price of the system (in euros) is detailed.
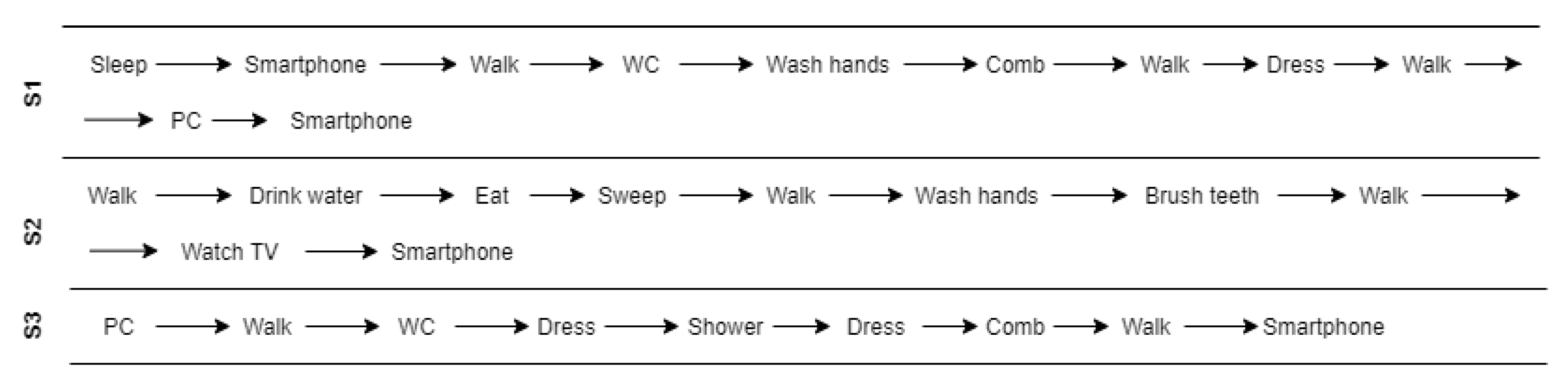
With regard to the activities that have been included in the system, the authors have selected a group of representative activities that we normally do in everyday life (Activities of Daily Living-ADLs). These activities can determine the degree of independence that a person can achieve at home [
3]. Also, in Reference [
58], some ADL that are found in clinical questionnaires were considered, so we have selected some of them to be included in our work. In addition, other papers such as References [
12,
59] studied preferential activities to introduce in their systems. In these, the Smart Lab includes similar sensors and devices to ours, so the activities detected can also be detected with systems such as DOLARS. Also, some new activities such as “Using the computer” or “Looking at the smartphone” have been added to our system in order to detect a sedentary lifestyle in adults. Thus, the activities included in the system are:
Walking (Walk)
Looking at the mobile phone (Smartphone)
Sleeping (Sleep)
Using the computer (PC)
Getting dressed (Dress)
Going to the toilet (WC)
Combing/Brushing hair (Comb)
Brushing the teeth (Brush teeth)
Washing the hands (Wash hands)
Having shower (Shower)
Drinking water (Drink water)
Eating (Eat)
Sweeping (Sweep)
Watching TV (Watch TV)
These activities can be indicators of a person’s status at home. Thus, in the case of elderly people, it may be indicative that the person has some ailment or injury when, for example, he/she stops sweeping, takes longer than normal to shower or stops eating. It is also possible to control the sedentary life of the inhabitants of the dwelling by detecting when a person spends most of his or her time sleeping, with a mobile phone or with a computer. Similarly, it is possible to control the diet of the inhabitants of the home by detecting the number of times they eat, drink water and go to the bathroom throughout the day. Consequently, the activities that have been included allow a study of the life of people living in the smart home and detecting possible anomalies in them to correct them and improve the user’s life.
3.3. Architecture for On-Line Activity Recognition from Heterogeneous Sensors
In this section, a distributed architecture deployed in the Smart Lab of UAL is presented (
Figure 15). It is focused on the scalability with distribution of remote tasks within real-time response which provide on-line activity recognition from heterogeneous sensors.
First, a light publish-subscribe model (MQTT) is detailed to integrate the data from different sensors in a unified way. Second, metrics and temporal features to describe and fuse the information from sensors is described. Real-time computing of temporal features is optimized by a distributed node and cache databases (Redis). At the end, on-line activity recognition is developed by means of real-time distributed services under a reliable publish-subscribe model (Kafka).
3.3.1. MQTT As an Homogeneous Protocol to Integrate Heterogeneous Devices
The on-line activity recognition system incorporated in the house makes use of a large amount of data which come from several devices which are located in the smart home that sense the behaviour of the user. The orchestration, distribution and design of services and modules for developing a scalable architecture for on-line activity recognition is required.
First, in this work, MQTT (Message Queue Telemetry Transport) protocol has been mostly adopted as protocol for integrating information from heterogeneous sensors. MQTT is an Open Source communication protocol in charge of message publication/subscription. This protocol has been adopted because it allows its possible integration into various technologies such as programming languages (including libraries), sensors and controller devices that interact with these sensors. Thanks to this protocol, we establish a permanent connection among devices and data flows from one to another when they are generated.
The role of MQTT as a homogeneous layer is key because mainly IoT devices are connected in heterogeneous protocols. First, several binary sensors, such as pressure, motion and door/window sensors, communicate with the controller by using ZWave protocol. This is a wireless communication protocol mainly used in domotics due to its low battery consumption. Here, a fog node is deployed as gateway between binary sensor and MQTT, receveing data from Z-Wave and translating the information in published messages in MQTT in real time. The access to the ZWave network is secured by the ZWave communication protocol. Some credentials established by the administrator are required each time the user wants to modify or view the network or access the generated data through the API.
Second, the location devices get the location of the user in real time by using the UWB protocol so as to communicate between them. Once the distance is calculated, a fog node is configured as a gateway to enable the translation of this information to MQTT in real time. Finally, the wearable wrist band incorporates an application that collects the data from the accelerometer and gyroscope sensor in real time and sends it to the controller by using the MQTT protocol. In the MQTT communications, a pair of encryption keys have been incorporated to secure the connection between the devices.
The left panel of
Figure 15 shows all the devices included and the communication protocols between each sensor and the controller. Next, a subscription fog node receives data from the sensors and devices in MQTT. It checks if the data are correct and stores them in the cloud in order to be processed. In particular, these data are stored in a MongoDB database deployed by the service MongoDB Atlas. This database has been chosen due to its flexibility and scalability. Once the data of the sensor are stored in the database, scripts deployed in several virtual machines process the data in order to recognize the activities which are being carried out by the inhabitants.
The controller of our system (Raspberry Pi) communicates with the cloud server by using wifi protocol.
3.3.2. Combining Spatio-Temporal Features from Heterogeneous Sensor
As defined in the previous section, three types of sensors are included in the smart lab which sense the space and the inhabitant with different data and frequency. First, the binary sensors, which are located in the lab in the ambient space in a static way, generate new data each time the user interacts with them, so the frequency of data generated cannot be predicted. However, this interaction in most cases is not higher than 10 interactions per minute. Second, the configured UWB location sensors produce one notification per second so, in this case, it is enough frequency to detect the position of the user in the smart lab. Third, sensors included in the smartwatch (accelerometer and gyroscope sensors) produce several new notifications per second. The exact number of notifications can be established in the smartwatch by the user. In this work, the frequency has been set to 100 notifications per second from the accelerometer sensor and from the gyroscope sensor. Thus, the device does not send new data every 10 milliseconds, but rather sends a batch of 100 data points every second, enabling lower battery consumption. This configuration offers almost 6 h of continuous monitoring for the data sensor. In this way, this frequency allows movements from people to be detected and therefore some short activities can be recognized.
Taking into account these different notification frequencies from the sensors, in this work a sliding window approach [
34] has been adopted. The sizes of these windows depend mainly on the nature of the sensor [
19,
29]. In this work, each sensor is related to different windows which have been defined in order to consider present and past notifications [
12]. Therefore, all sensors have a short term window which represents the current state of the sensor and other middle term windows which represent past notifications. The configuration of multiple windows from current time to past facilitate the parameter impact of the window size as a critical point in activity recognition [
12,
23]. So, the different window sizes which have been defined for each sensor are shown in
Table 2.
In fact, in relation to the binary sensors, two windows have been defined so that the present window, which defines the current state of the sensor, lasts 5 s and the past window lasts 30 s. In relation to second group of sensors, UWB location sensors, which have higher notification frequency than binary ones, their window sizes are smaller. For these sensors, three different windows have been defined. The present or current window lasts only 1.5 s and two past window sizes have also been considered as shown in
Table 2. Finally, accelerometer and gyroscope sensors, with the highest notification frequency (100 Hz) require smaller window sizes, in such a way that the current window, which determines a single user movement, lasts only 0.5 s. Some other past windows have to be considered in order to include the current movement into a determinate activity. These past windows have different sizes with a maximal duration of 5 s. Some bigger windows are not included as they could provide useless data and deteriorate other important data gathered.
Once all the sliding windows for each type of sensor have been defined, it is necessary to process the data and generate some important features which will be the input of the developed algorithm. In this work the minimal window size for the feature vector has been fixed to 0.5 s. This minimal window is defined as time-step and indicates that every 0.5 s the system has to provide a recognized activity based on the feature vector [
23,
33].
In addition, there are several approaches which concern the most important features. In some cases, some basic metrics like maximum, minimum, average and standard deviation are applied to each window [
60]. In this work, after making some preliminary experiments with different metrics, the minimum, maximum and average have provided encouraging results, not being necessary the use of other metrics.
Therefore, for the inertial sensors, three characteristic values (maximum, minimum and average) are associated with each window, and depending on the number of windows, a different number of characteristics will be required. In particular, each window of the inertial sensors (accelerometer, gyroscope and location) contains the maximum, minimum and average value of each coordinate. As they have 3 coordinates (x, y and z), each window contains 9 features. Considering that the accelerometer and gyroscope have 4 windows of time, a total of 36 features will be required for each one. The location sensor has 3 windows so it will provide 27 features. On the other hand, in the case of binary sensors, the approach is different because only the average feature has been representative. Therefore, each sensor provides as many features as windows have been defined for the binary sensors. A total of 117 features are computed given the defined windows.
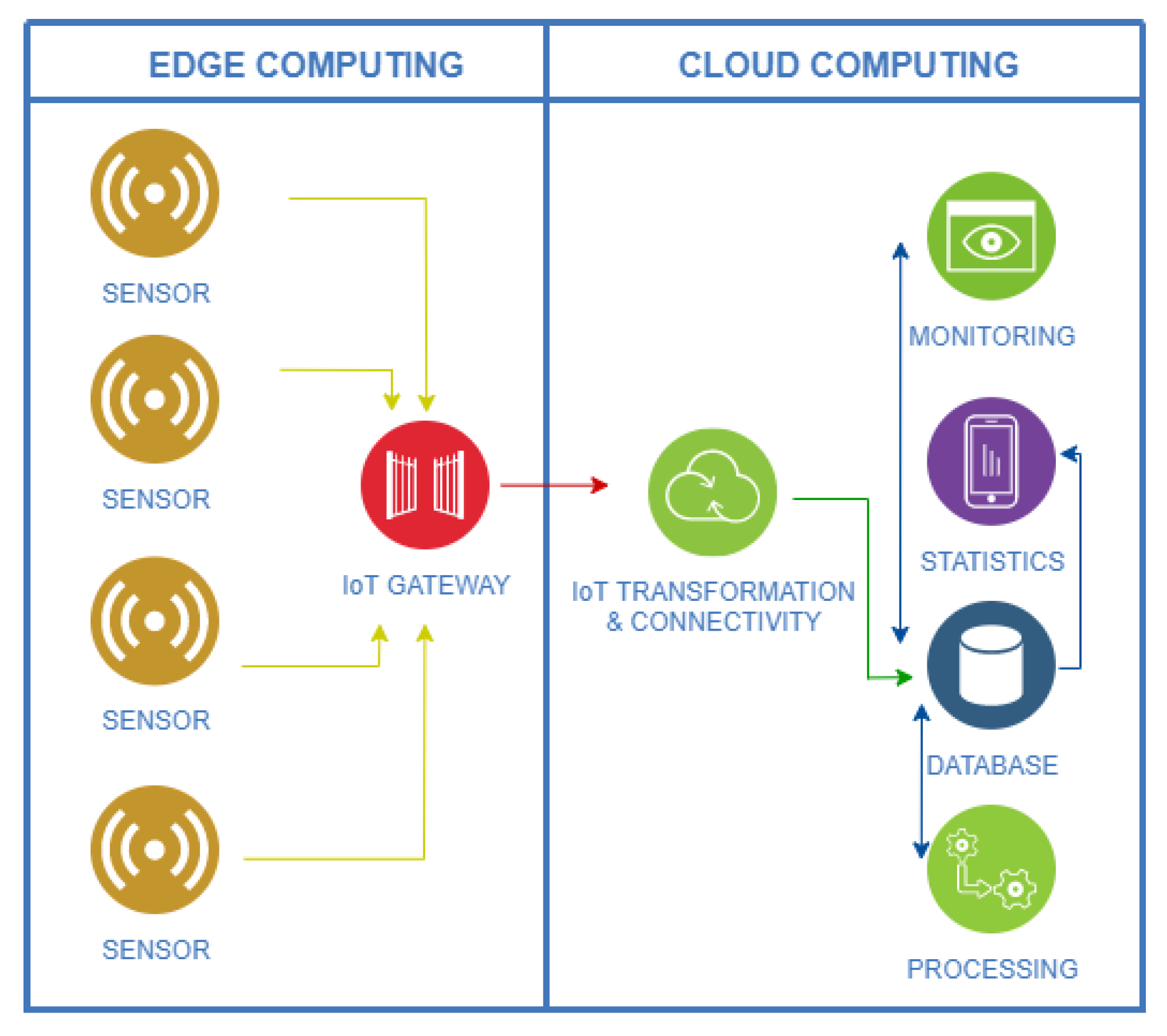
3.3.3. Optimizing the Real-Time Computing of Temporal Features in Cache Databases
In this work, there are several sources which produce data that have to be processed in order to obtain an activity. The challenge of our approach is recognizing user activity in real time in a high frequency defined by a time-step (each 500 milliseconds). Consequently, the communication between the devices and the group of controllers must be constant and simultaneous to the reception of the data from the sensors. As each source (or sensor) has a different frequency and delays and there is a huge amount of information gathered per second. Considering that our system has two low-cost controllers (Raspberry 3B+) it would be quite complicated to design an efficient edge system that supports a kafka broker with several groups of consumers and that simultaneously obtains sensor data, calculates metrics, processes the data, evaluates results and stores the resulting information. Therefore, edge computing, where devices gather and process the data, is difficult to apply here, having to focus on cloud or fog computing of the data. In this point, we clarify that the DOLARS architecture described has been deployed in the local network and nodes of UAL, so it is compatible with fog/cloud approaches. Nevertheless, in the next sections we distinguish between fog nodes where the computing processes, such as gateways, are located close to the devices which collect the data, and cloud nodes which configure the approach for on-line AR which are developed in a distributed way without restrictions in terms of physical location for deployment. As there is a huge amount of data (
Table 2) to be gathered and processed for determining one activity in a specific range of time (0.5 s), using a single processor could sometimes provoke a
bottleneck and therefore it would imply that the system would not recognize the activities in real time. Consequently, it is necessary to distribute the data and processing of the window into different nodes or processes by defining a pipeline. For this reason, some tools like cache storage and real time distribution platforms are incorporated into the system.
A computationally expensive part in the system is that it would have to access the database not only to extract the data from the last window but also from the previous windows that had been processed previously. In order to reduce accesses to the database, a cache has been introduced into the system where the data that are read from the database are stored and will be used in future time window calculations. This cache database is integrated by Redis database which let users store data following a key-value pattern that is very useful to this problem. Here, the raw data from each new 0.5-s-window is stored following the pattern “timestamp(key)-data(value)” as shown in
Figure 16. In this Figure, the corresponding “gyroscope” sensor windows generated for two consecutive instants are shown, where different colours represent different duration of windows (5.0, 3.0, 1.0 and 0.5 s) indicated in
Table 2. Red represents the 0.5 s window that is the only one that contains new data compared to the previous instant. Information on the remaining windows has already be processed in previous instants of time and it is not necessary to access to the database to get this information. To compute the features of each window it is therefore necessary to process all the data defined by them.
Taking into account
Table 2, which shows the 13 windows to be considered, initially each time a new window arrives, the database would have to be accessed 13 times. However, considering the new approach, it is only necessary to access the database 4 times, once for each type of sensor defined in
Table 2. In these accesses only the information of the smallest window defined for each sensor is read (0.5 s in case of the accelerometer and gyroscope, 1.5 s for location and 5 s for binary sensors). In addition, the amount of time employed on these query operations within a time interval with the external database is widely reduced.
Computing features from temporal data has been properly optimized in the Redis database thanks to the segmentation of mid-second windows. When new data arrive, the node computes the features of the current window (maximum, minimum and average), storing these metrics rather than raw data, as shown in
Figure 17. So when another node computes the features in a given interval, it is only necessary to recover the metrics of mid-second windows.
3.3.4. On-Line Activity Recognition by Means of Real-Time Distributed Services under Publish-Subscribe Model
When the computing of features in the cache from the new 0.5-s-window is completed, next, a process has to gather the mid-second windows forming bigger windows as defined in
Figure 18. Once these windows are gathered, the overall features have to be calculated to be classified. These operations do not last a fixed amount of time and, in some cases, processing time of features and recognition could be greater than the real-time time-step to develop the AR in real time (0.5 s). This would imply that it would be impossible to achieve a real-time activity recognition.
As mentioned above the MQTT broker is focused on the exchange of messages on many different topics. However, in order to process the massive amount of data in real time, we have selected the Apache Kafka broker, whose focus is storing massive amounts of data on disk, and allowing a distributed consumption in real time under a publish-subscribe paradigm [
61]. Apache Kafka has been designed to be deployable as a cluster of multiple nodes, with good scalability properties.
Therefore the tool of Apache Kafka has been incorporated into our system following the structure shown in
Figure 19. A process generates one new datum every 0.5 s which defines the current time, and sends it to the Kafka broker. Inside this broker, different topics can be defined. In the example on
Figure 19, the “analysis” topic is used. In addition, each topic has several partitions in order to speed up the processes. In this way, the received messages are distributed among these partitions following a first in, first out system. Finally, we define as many different consumer groups as number of sources producing data the system has. So, in the example, there are two consumer groups running because the system recognizes the activity of two people in the smart home. At each consumer group, there are as many consumer processes as partitions has the topic. Each consumer processes the sensor data which is involved in each received message. Thus, each consumer group receives all the information provided by the producer node.
Once the structure and organization of the nodes system is developed, the operations which take place on the producer node and the consumer node have to be analyzed. On the one hand, the producer node generates new data specifying the current time-stamp each 0.5 s. Once these data are generated, it gathers them from the database, calculates the metrics and stores them in the cache system. After that, it sends data to the Kafka broker and finally the process starts again. About calculating the metrics, it uses the “pandas” library which offers developers some tools to transform the data in an easy way. This method is widely adopted in big data and machine learning problems.
On the other hand, the consumer nodes receive some data referencing the window they have to process. Each consumer node is associated with a partition into the broker that balances data among partitions. Therefore each node gathers data from all the required windows and later calculates their features (maximum, minimum and average). After that, a fusion of these data is done, obtaining a feature vector with 117 features in this system, being followed by a pre-processing process. Finally, a machine learning classifier, which is installed at each node, makes a classification of the input data to recognize an activity.
3.3.5. Classification Models, Pre-Processing of Data and Configuration
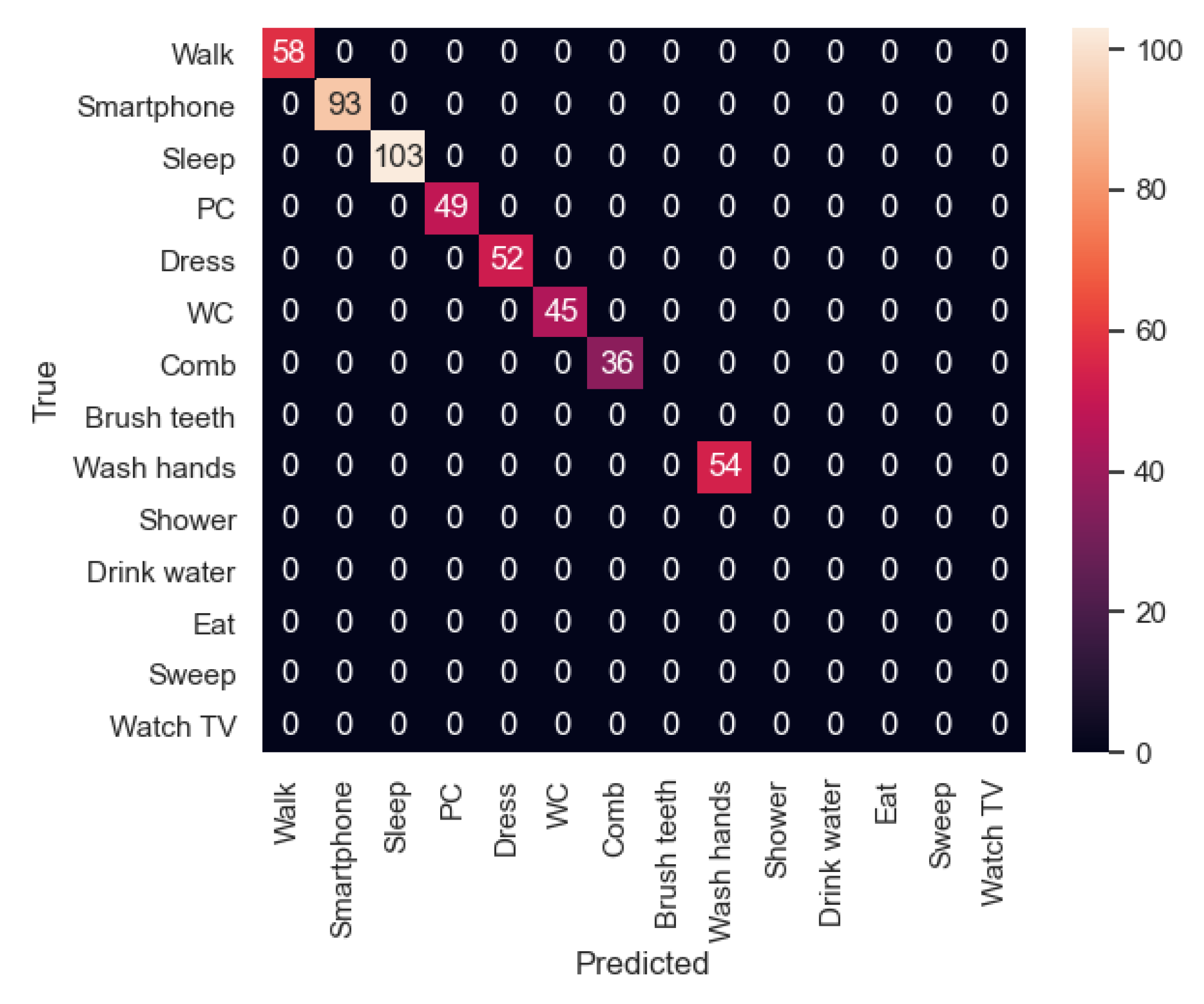
As mentioned, some machine learning techniques have been compared in order to determine which one obtains better results. These techniques have been applied in the consumer nodes. In this work, kNN (k-nearest neighbors), RandomForest and SVM (Support vector machine) classification algorithms have been compared in order to select the one having better results.
First, kNN (k-nearest neighbors) is an algorithm which does not generate a model for the classification of the new data, but in order to perform this classification it is based on previously classified instances. To classify a new record, the algorithm calculates the distance between it and each record stored in the algorithm, being classified according to the characteristics of the k registers most similar to this one. Second, SVM (Support vector machine) is an algorithm whose main objective is to generate a limitation (hyper plane) among the different classes (activities in this case) in such a way that this limitation is as separate as possible from these classes, thus differentiating the set of data and limiting the “region” corresponding to each class. Therefore, the more separated the hyper plane is from the elements of the classes, the more limited these classes are and the better the classification will be done later. Third, a decision tree is a machine learning algorithm that contains different levels with decisions that lead to a final result. The final result consists of leaf nodes that correspond to the class that is associated with the data that is being classified.
RandomForest is an ensemble of decision trees combined with bagging. When using bagging, different trees see different portions of the data. No one tree sees all the training data. This makes each tree train with different data samples for the same problem. In this way, by combining their results, some errors are compensated with others and we have a better generalising prediction.
Therefore, in this system, kNN, SVM and RandomForest are tuned with different configurations by using the feature “Random Hyperparameter Grid” from scikit-learn. However, in most of cases, the best configuration is the default one offered by the library. Thus, the first model is kNN, which computes the number of neighbours as the square root of the total number of data in the dataset. It uses the “Euclidean” distance as the metric to compute distances between neighbors, and it defines the “distance” magnitude as the weight function, in such a way that close neighbors of a query point have a greater influence than neighbors which are further away. The second resulting model is kNN having 100 number of neighbors, using the “Manhattan” distance and defining a “uniform” weight function where close neighbors have the same influence than the ones which are further away. Third model is SVM, which is tuned by establishing the Radial Basic Function (RBF) as kernel. The fourth model, RandomForest, is configured following the default parameters, as they fit well with the testing dataset. The most important parameters are: number of estimators equal to 100, no max-depth of the trees and the minimum number of samples in the leaf nodes fixed to 2.
In addition, it is interesting to remark that before classifying the data by using some machine learning models, it is necessary to follow a pre-processing step for the data.
Firstly, variable scaling techniques are included. On the one hand, a procedure that normalizes the data to have a distribution with mean equal to 0 and variance 1 is tested. On the other hand, a procedure that scales the data of the characteristics vector to a range of 0-1 is tested [
62].
Second, techniques for selecting attributes are included. These range from using an SVM classifier to detect the attributes that are important in the classification to using variance to discard data with little variation.
Finally, the different pre-processing techniques are tested on the current data to see which ones yield better data with the defined data and algorithms.
In this work, several configurations have been adopted in order to evaluate each algorithm. “Default” does not include any pre-processing step; “scaled” includes the data in a range of 0–1; “normalized” implements a standard scaler in the data; “ats_var” includes a feature selection by removing the attributes with low variance; “ats_model” removes the attributes by following their importance in SVM classification and finally, “norm_ats_model” normalizes the data and selects the attributes by following an SVM model.




































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}