Using Accelerometer Data to Tune the Parameters of an Extended Kalman Filter for Optical Motion Capture: Preliminary Application to Gait Analysis



Abstract
:1. Introduction
2. Materials and Methods
2.1. Preliminary Test
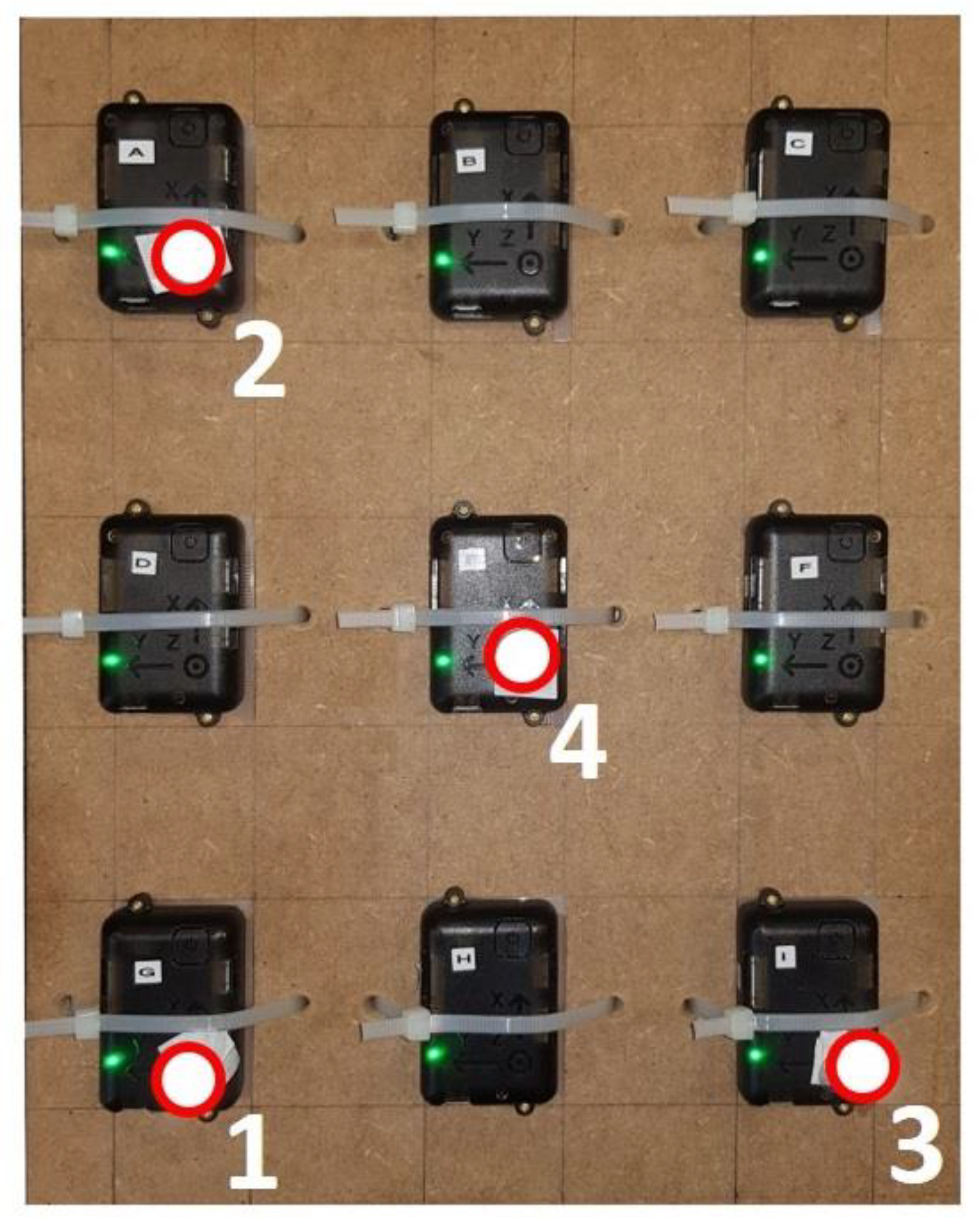
2.1.1. Experimental Data Collection
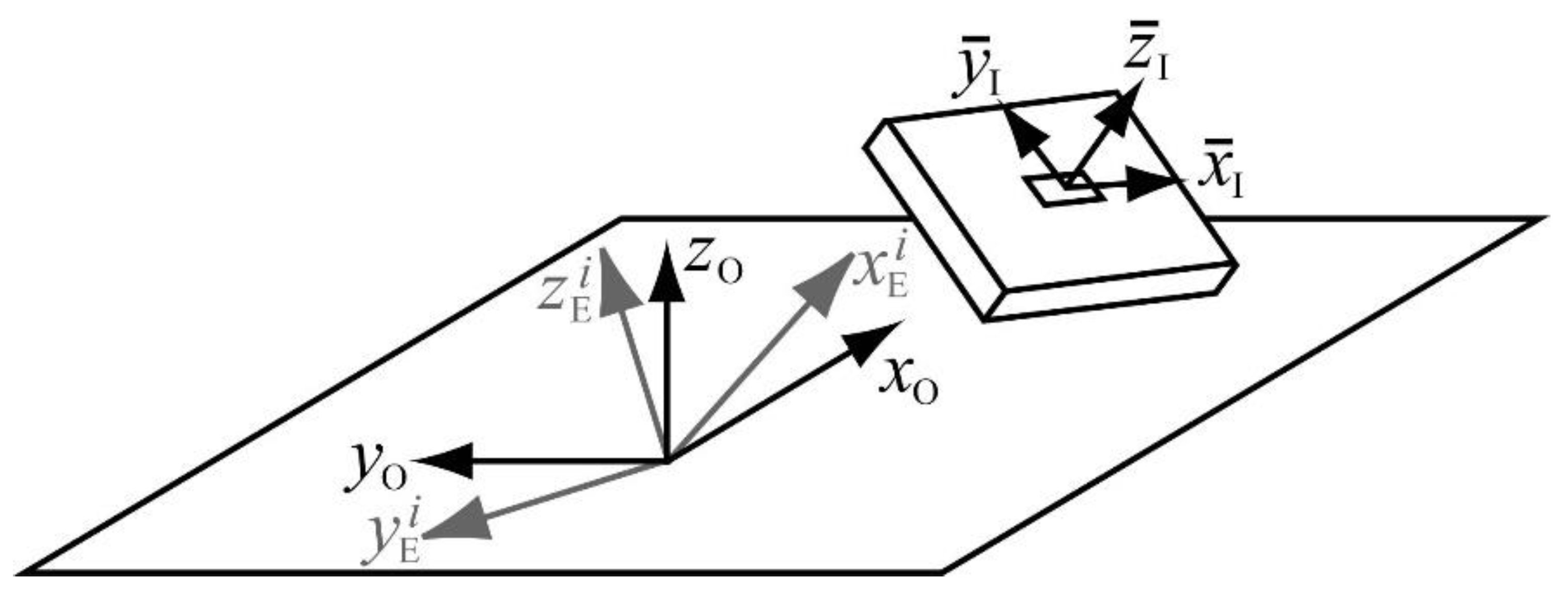
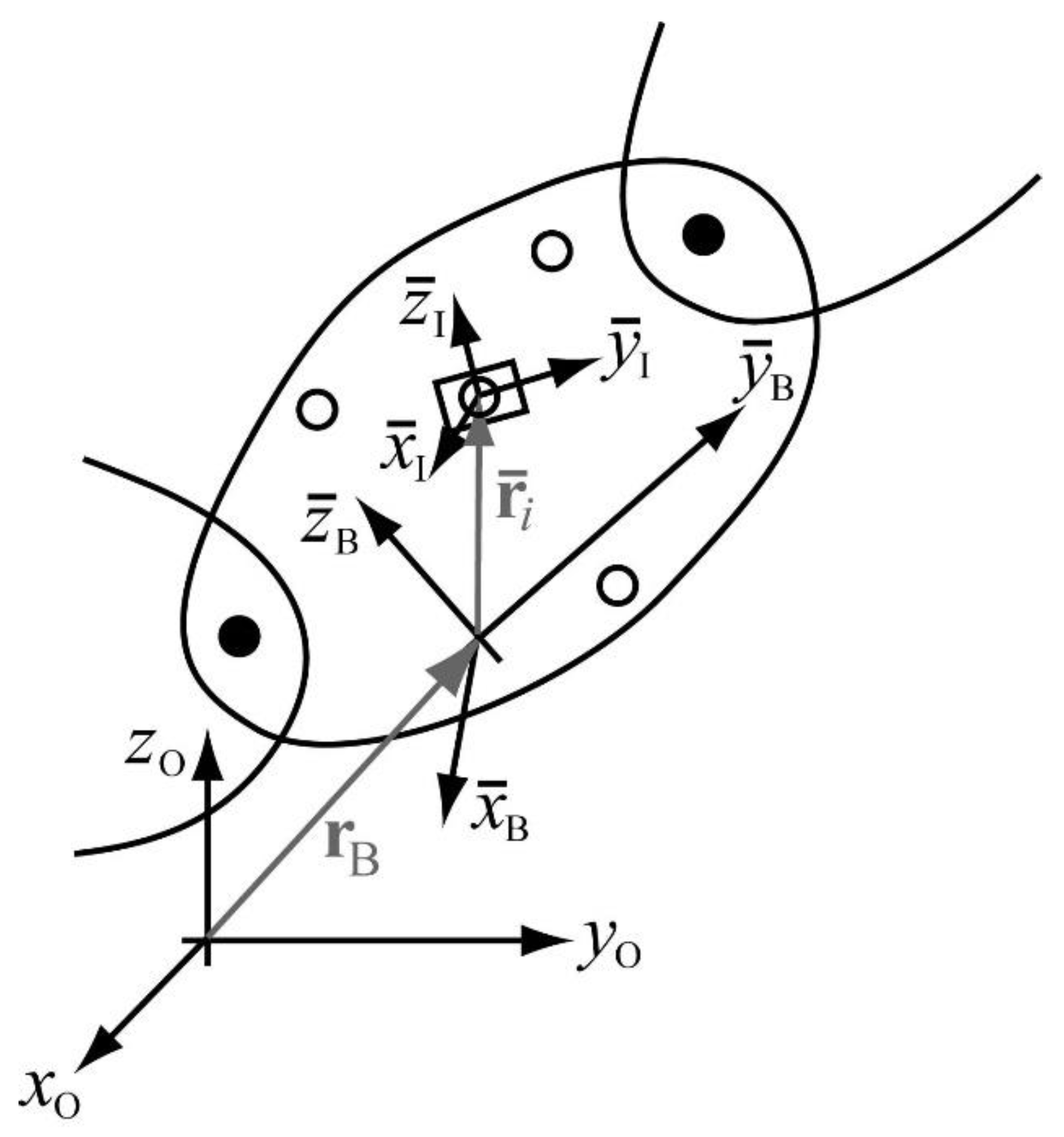
2.1.2. Sensor Orientation and Geomagnetic Frame of Reference
2.2. Gait Analysis
2.2.1. Experimental Data Collection
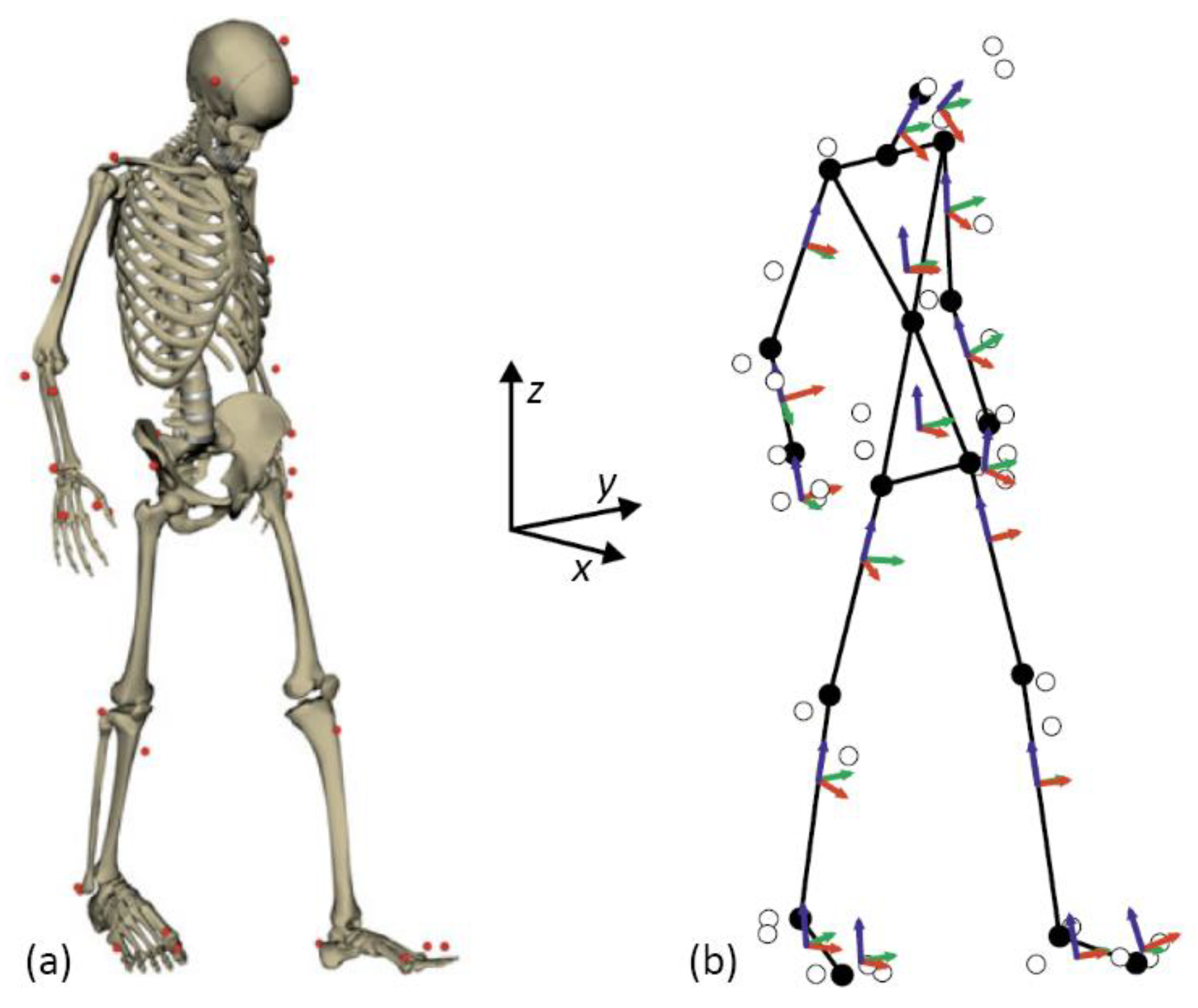
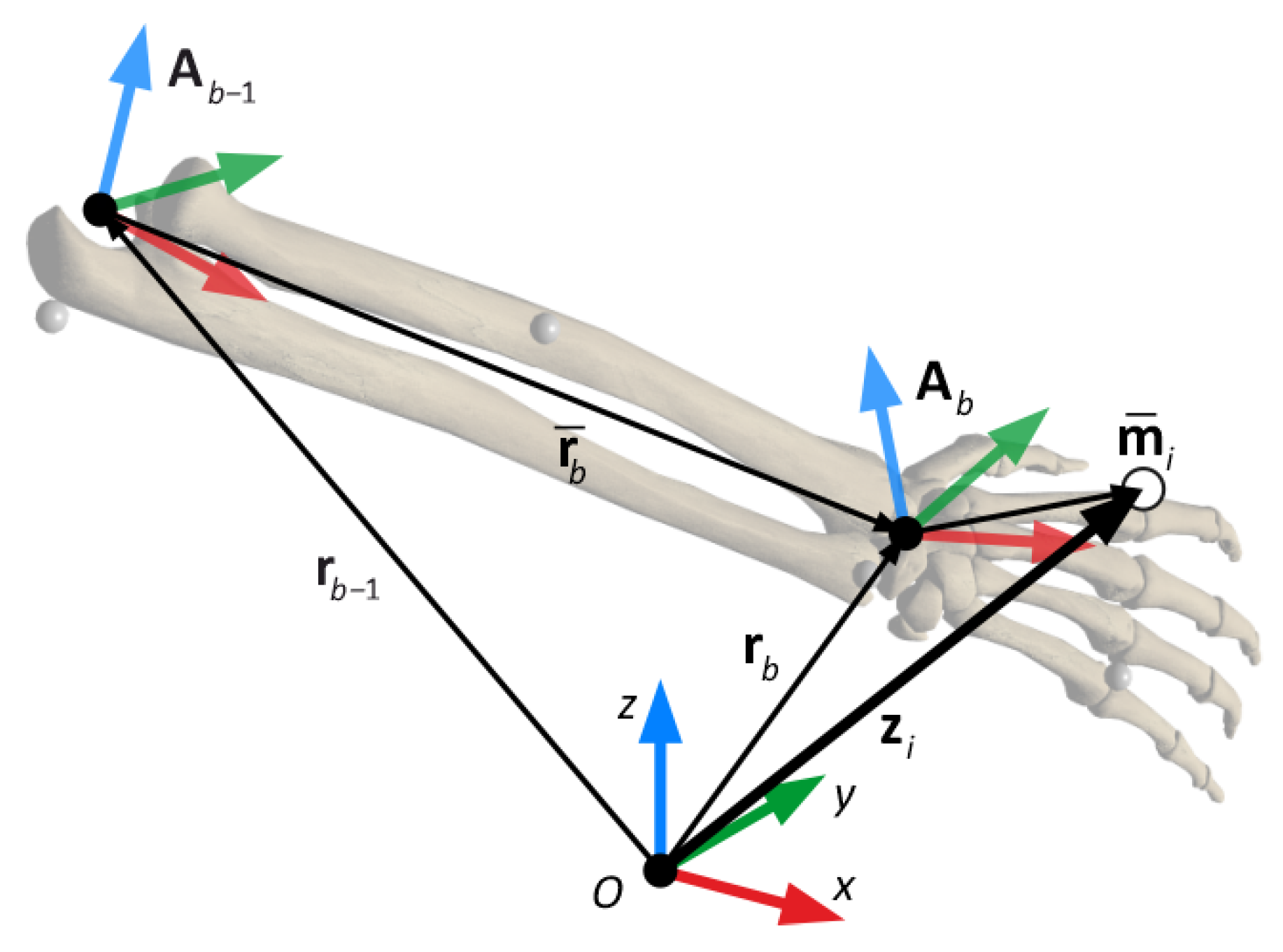
2.2.2. Skeletal Model and Kinematics
2.2.3. Motion Reconstruction from Motion Capture Data
2.2.4. Extended Kalman Filter for Motion Reconstruction
2.2.5. Calculation of the Accelerations
3. Results
3.1. Preliminary Test and Calibration
3.2. Gait Analysis
3.2.1. Vaughan’s Method
3.2.2. Extended Kalman Filter
4. Discussion and Limitations of the Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Baker, R. The history of gait analysis before the advent of modern computers. Gait Posture 2007, 26, 331–342. [Google Scholar] [CrossRef] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Movement, 4th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2009. [Google Scholar]
- Bachmann, E.R.; Yun, X.; McGhee, R.B. Sourceless tracking of human posture using small inertial/magnetic sensors. In Proceedings of the 2003 IEEE International Symposium on Computational Intelligence in Robotics and Automation. Computational Intelligence in Robotics and Automation for the New Millennium (Cat. No.03EX694), Kobe, Japan, 16–20 July 2003; Volume 2, pp. 822–829. [Google Scholar]
- Fong, D.; Chan, Y.Y. The Use of Wearable Inertial Motion Sensors in Human Lower Limb Biomechanics Studies: A Systematic Review. Sensors 2010, 10, 11556–11565. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of Walking Features From Foot Inertial Sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, T.; Inoue, Y.; Shibata, K. Development of a wearable sensor system for quantitative gait analysis. Measurement 2009, 42, 978–988. [Google Scholar] [CrossRef]
- Teufl, W.; Lorenz, M.; Miezal, M.; Taetz, B.; Fröhlich, M.; Bleser, G. Towards inertial sensor based mobile gait analysis: Event-detection and spatio-temporal parameters. Sensors 2018, 19, 38. [Google Scholar] [CrossRef] [Green Version]
- Okkalidis, N.; Camilleri, K.P.; Gatt, A.; Bugeja, M.K.; Falzon, O. A review of foot pose and trajectory estimation methods using inertial and auxiliary sensors for kinematic gait analysis. Biomed. Tech. 2020, 65, 653–671. [Google Scholar] [CrossRef]
- Lambrecht, S.; del-Ama, A.J. Human movement analysis with inertial sensors. Biosyst. Biorobotics 2014, 4, 305–328. [Google Scholar]
- Blair, S.J. Biomechanical Considerations in Goal- Kicking Accuracy: Application of an Inertial Measurement System. Ph.D. Thesis, College of Sport and Exercise Science Institute for Health and Sport (IHES), Melbourne, Australia, 2019. [Google Scholar]
- Picerno, P.; Cereatti, A.; Cappozzo, A. A spot check for assessing static orientation consistency of inertial and magnetic sensing units. Gait Posture 2011, 33, 373–378. [Google Scholar] [CrossRef]
- Seaman, A.; McPhee, J. Comparison of optical and inertial tracking of full golf swings. Procedia Eng. 2012, 34, 461–466. [Google Scholar] [CrossRef] [Green Version]
- Brodie, M.A.; Walmsley, A.; Page, W. The static accuracy and calibration of inertial measurement units for 3D orientation. Comput. Methods Biomech. Biomed. Eng. 2008, 11, 641–648. [Google Scholar] [CrossRef]
- Lebel, K.; Boissy, P.; Nguyen, H.; Duval, C. Inertial measurement systems for segments and joints kinematics assessment: Towards an understanding of the variations in sensors accuracy. Biomed. Eng. Online 2017, 16, 56. [Google Scholar] [CrossRef] [PubMed]
- Robert-Lachaine, X.; Mecheri, H.; Larue, C.; Plamondon, A. Validation of inertial measurement units with an optoelectronic system for whole-body motion analysis. Med. Biol. Eng. Comput. 2017, 55, 609–619. [Google Scholar] [CrossRef] [PubMed]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.J.; Roy, J. Validity and reliability ofwearable sensors for joint angle estimation: A systematic review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rezaei, A.; Cuthbert, T.J.; Gholami, M.; Menon, C. Application-based production and testing of a core–sheath fiber strain sensor for wearable electronics: Feasibility study of using the sensors in measuring tri-axial trunk motion angles. Sensors 2019, 19, 4288. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weygers, I.; Kok, M.; Konings, M.; Hallez, H.; de Vroey, H.; Claeys, K. Inertial sensor-based lower limb joint kinematics: A methodological systematic review. Sensors 2020, 20, 673. [Google Scholar] [CrossRef] [Green Version]
- Pacher, L.; Chatellier, C.; Vauzelle, R.; Fradet, L. Sensor-to-segment calibration methodologies for lower-body kinematic analysis with inertial sensors: A systematic review. Sensors 2020, 20, 3322. [Google Scholar] [CrossRef]
- Holden, D. Robust solving of optical motion capture data by denoising. ACM Trans. Graph. 2018, 37, 165. [Google Scholar] [CrossRef]
- Ghorbani, S.; Etemad, A.; Troje, N.F. Auto-labelling of Markers in Optical Motion Capture by Permutation Learning. Lect. Notes Comput. Sci. 2019, 11542, 167–178. [Google Scholar]
- Lugrís, U.; Vilela, R.; Sanjurjo, E.; Mouzo, F.; Michaud, F. Implementation of an Extended Kalman Filter for robust real-time motion capture using IR cameras and optical markers. In Proceedings of the IUTAM Symposium on Intelligent Multibody Systems—Dynamics, Control, Simulation, Sozopol, Bulgaria, 11–15 September 2017; pp. 3–4. [Google Scholar]
- Skogstad, S.A.v.; Nymoen, K.; Høvin, M.E.; Holm, S.; Jensenius, A.R. Filtering Motion Capture Data for Real-Time Applications. In Proceedings of the 13th International Conference on New Interfaces for Musical Expression, Daejeon, Korea, 27–30 May 2013; pp. 142–147. [Google Scholar]
- Bisseling, R.W.; Hof, A.L. Handling of impact forces in inverse dynamics. J. Biomech. 2006, 39, 2438–2444. [Google Scholar] [CrossRef]
- Liu, X.; Cheung, Y.M.; Peng, S.J.; Cui, Z.; Zhong, B.; Du, J.X. Automatic motion capture data denoising via filtered subspace clustering and low rank matrix approximation. Signal Process. 2014, 105, 350–362. [Google Scholar] [CrossRef]
- Skurowski, P.; Pawlyta, M. On the noise complexity in an optical motion capture facility. Sensors 2019, 19, 4435. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burdack, J.; Horst, F.; Giesselbach, S.; Hassan, I.; Daffner, S.; Schöllhorn, W.I. Systematic Comparison of the Influence of Different Data Preprocessing Methods on the Performance of Gait Classifications Using Machine Learning. Front. Bioeng. Biotechnol. 2020, 8, 260. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sinclair, J.; Taylor, P.J.; Hobbs, S.J. Digital filtering of three-dimensional lower extremity kinematics: An assessment. J. Hum. Kinet. 2013, 39, 25–36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Molloy, M.; Salazar-Torres, J.; Kerr, C.; McDowell, B.C.; Cosgrove, A.P. The effects of industry standard averaging and filtering techniques in kinematic gait analysis. Gait Posture 2008, 28, 559–562. [Google Scholar] [CrossRef] [PubMed]
- Cappello, A.; la Palombara, P.F.; Leardini, A. Optimization and smoothing techniques in movement analysis. Int. J. Biomed. Comput. 1996, 41, 137–151. [Google Scholar] [CrossRef]
- Schreven, S.; Beek, P.J.; Smeets, J.B.J. Optimising filtering parameters for a 3D motion analysis system. J. Electromyogr. Kinesiol. 2015, 25, 808–814. [Google Scholar] [CrossRef] [Green Version]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef] [Green Version]
- De Groote, F.; de Laet, T.; Jonkers, I.; de Schutter, J. Kalman smoothing improves the estimation of joint kinematics and kinetics in marker-based human gait analysis. J. Biomech. 2008, 41, 3390–3398. [Google Scholar] [CrossRef]
- Cerveri, P.; Pedotti, A.; Ferrigno, G. Robust recovery of human motion from video using Kalman filters and virtual humans. Hum. Mov. Sci. 2003, 22, 377–404. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Sabatini, A.M. Quaternion-Based Extended Kalman Filter for Determining Orientation by Inertial and Magnetic Sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef]
- Vaughan, C.L.; Davis, B.L.; O’Connor, J.C. Dynamics of Human Gait, 2nd ed.; Kiboho Publishers: Cape Town, South Africa, 1999. [Google Scholar]
- Cordillet, S.; Bideau, N.; Bideau, B.; Nicolas, G. Estimation of 3D knee joint angles during cycling using inertial sensors: Accuracy of a novel sensor-to-segment calibration procedure based on pedaling motion. Sensors 2019, 19, 2474. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lugrís, U.; Carlín, J.; Pàmies-Vilà, R.; Font-Llagunes, J.M.; Cuadrado, J. Solution methods for the double-support indeterminacy in human gait. Multibody Syst. Dyn. 2013, 30, 247–263. [Google Scholar] [CrossRef]
- Delp, S.L.; Anderson, F.C.; Arnold, A.S.; Loan, P.; Habib, A.; John, C.T.; Guendelman, E.; Thelen, D.G. OpenSim: Open-Source Software to Create and Analyze Dynamic Simulations of Movement. IEEE Trans. Biomed. Eng. 2007, 54, 1940–1950. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alonso, F.J.; Cuadrado, J.; Lugrís, U.; Pintado, P. A compact smoothing-differentiation and projection approach for the kinematic data consistency of biomechanical systems. Multibody Syst. Dyn. 2010, 24, 67–80. [Google Scholar] [CrossRef]
- Bar-Shalom, Y.; Li, X.R.; Kirubarajan, T. Estimation with Applications to Tracking and Navigation; John Wiley & Sons, Inc.: New York, NY, USA, 2001. [Google Scholar]
- Lutz, J.; Memmert, D.; Raabe, D.; Dornberger, R.; Donath, L. Wearables for integrative performance and tactic analyses: Opportunities, challenges, and future directions. Int. J. Environ. Res. Public Health 2020, 17, 59. [Google Scholar] [CrossRef] [Green Version]
- Woodman, O.J. An Introduction to Inertial Navigation; UCAM-CL-TR-696; Computer Laboratory, University of Cambridge: Cambridge, UK, 2007. [Google Scholar]
- Bartlett, R. Introduction to Sports Biomechanics; Routledge: London, UK, 2007. [Google Scholar]
- Kristianslund, E.; Krosshaug, T.; van den Bogert, A.J. Effect of low pass filtering on joint moments from inverse dynamics: Implications for injury prevention. J. Biomech. 2012, 45, 666–671. [Google Scholar] [CrossRef] [Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cutoff Freq. (Hz) | RMSE (m/s2) | |||||||
|---|---|---|---|---|---|---|---|---|
| Pelvis | R Thigh | L Thigh | R Tibia | L Tibia | R Foot | L Foot | Mean | |
| 6 | 0.626 | 1.034 | 1.123 | 1.583 | 1.502 | 2.743 | 2.485 | 1.585 |
| 8 | 0.578 | 1.005 | 1.071 | 1.538 | 1.448 | 2.640 | 2.405 | 1.336 |
| 10 | 0.559 | 0.997 | 1.043 | 1.515 | 1.428 | 2.571 | 2.362 | 1.309 |
| 12 | 0.559 | 1.003 | 1.031 | 1.508 | 1.426 | 2.529 | 2.339 | 1.299 |
| 15 | 0.583 | 1.034 | 1.036 | 1.521 | 1.445 | 2.504 | 2.328 | 1.306 |
| 20 | 0.680 | 1.138 | 1.086 | 1.607 | 1.510 | 2.526 | 2.354 | 1.363 |
| 25 | 0.840 | 1.303 | 1.181 | 1.771 | 1.602 | 2.590 | 2.422 | 1.464 |
| 30 | 1.045 | 1.517 | 1.314 | 2.002 | 1.706 | 2.679 | 2.526 | 1.599 |
| 40 | 1.531 | 2.035 | 1.654 | 2.602 | 1.931 | 2.897 | 2.815 | 1.933 |
| Acc. Std. (m/s2 or rad/s2) | Cutoff Freq. (Hz) | RMSE (m/s2) | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Pelvis | R Thigh | L Thigh | R Tibia | L Tibia | R Foot | L Foot | Mean | ||
| 0.1 | 6 | 0.717 | 1.047 | 1.195 | 1.663 | 1.624 | 2.649 | 2.430 | 1.618 |
| 0.1 | 10 | 0.679 | 1.020 | 1.155 | 1.679 | 1.618 | 2.530 | 2.338 | 1.377 |
| 0.1 | 15 | 0.676 | 1.018 | 1.136 | 1.678 | 1.614 | 2.433 | 2.274 | 1.354 |
| 0.1 | 20 | 0.682 | 1.022 | 1.133 | 1.674 | 1.611 | 2.377 | 2.229 | 1.341 |
| 0.1 | 25 | 0.690 | 1.028 | 1.135 | 1.672 | 1.612 | 2.341 | 2.198 | 1.335 |
| 0.1 | 30 | 0.698 | 1.035 | 1.140 | 1.672 | 1.615 | 2.318 | 2.176 | 1.332 |
| 0.5 | 6 | 0.606 | 1.011 | 1.108 | 1.513 | 1.442 | 2.553 | 2.274 | 1.313 |
| 0.5 | 10 | 0.545 | 0.969 | 1.030 | 1.514 | 1.412 | 2.340 | 2.105 | 1.239 |
| 0.5 | 15 | 0.557 | 0.965 | 1.017 | 1.524 | 1.415 | 2.183 | 2.004 | 1.208 |
| 0.5 | 20 | 0.582 | 0.977 | 1.034 | 1.530 | 1.424 | 2.098 | 1.943 | 1.198 |
| 0.5 | 25 | 0.608 | 0.996 | 1.058 | 1.538 | 1.439 | 2.049 | 1.907 | 1.199 |
| 0.5 | 30 | 0.634 | 1.018 | 1.083 | 1.553 | 1.458 | 2.018 | 1.887 | 1.207 |
| 1 | 6 | 0.604 | 1.006 | 1.099 | 1.484 | 1.433 | 2.565 | 2.267 | 1.307 |
| 1 | 10 | 0.538 | 0.963 | 1.026 | 1.454 | 1.383 | 2.330 | 2.072 | 1.221 |
| 1 | 15 | 0.562 | 0.961 | 1.033 | 1.457 | 1.379 | 2.161 | 1.955 | 1.188 |
| 1 | 20 | 0.601 | 0.978 | 1.067 | 1.466 | 1.393 | 2.074 | 1.890 | 1.183 |
| 1 | 25 | 0.639 | 1.004 | 1.105 | 1.483 | 1.417 | 2.026 | 1.857 | 1.191 |
| 1 | 30 | 0.679 | 1.036 | 1.143 | 1.511 | 1.446 | 1.999 | 1.843 | 1.207 |
| 10 | 6 | 0.632 | 0.987 | 1.132 | 1.473 | 1.439 | 2.580 | 2.324 | 1.321 |
| 10 | 10 | 0.576 | 0.926 | 1.086 | 1.393 | 1.343 | 2.344 | 2.131 | 1.225 |
| 10 | 15 | 0.606 | 0.928 | 1.115 | 1.374 | 1.300 | 2.174 | 2.002 | 1.187 |
| 10 | 20 | 0.665 | 0.973 | 1.168 | 1.397 | 1.307 | 2.084 | 1.934 | 1.191 |
| 10 | 25 | 0.739 | 1.041 | 1.228 | 1.452 | 1.342 | 2.037 | 1.909 | 1.218 |
| 10 | 30 | 0.823 | 1.124 | 1.292 | 1.538 | 1.391 | 2.014 | 1.913 | 1.262 |
| 50 | 6 | 0.633 | 0.989 | 1.134 | 1.478 | 1.442 | 2.578 | 2.330 | 1.323 |
| 50 | 10 | 0.574 | 0.933 | 1.088 | 1.401 | 1.348 | 2.343 | 2.142 | 1.229 |
| 50 | 15 | 0.603 | 0.943 | 1.119 | 1.386 | 1.307 | 2.177 | 2.018 | 1.194 |
| 50 | 20 | 0.666 | 1.000 | 1.179 | 1.424 | 1.319 | 2.091 | 1.955 | 1.204 |
| 50 | 25 | 0.753 | 1.085 | 1.253 | 1.507 | 1.359 | 2.047 | 1.937 | 1.243 |
| 50 | 30 | 0.859 | 1.190 | 1.336 | 1.632 | 1.416 | 2.032 | 1.953 | 1.302 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuadrado, J.; Michaud, F.; Lugrís, U.; Pérez Soto, M. Using Accelerometer Data to Tune the Parameters of an Extended Kalman Filter for Optical Motion Capture: Preliminary Application to Gait Analysis. Sensors 2021, 21, 427. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020427
Cuadrado J, Michaud F, Lugrís U, Pérez Soto M. Using Accelerometer Data to Tune the Parameters of an Extended Kalman Filter for Optical Motion Capture: Preliminary Application to Gait Analysis. Sensors. 2021; 21(2):427. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020427
Chicago/Turabian StyleCuadrado, Javier, Florian Michaud, Urbano Lugrís, and Manuel Pérez Soto. 2021. "Using Accelerometer Data to Tune the Parameters of an Extended Kalman Filter for Optical Motion Capture: Preliminary Application to Gait Analysis" Sensors 21, no. 2: 427. https://0-doi-org.brum.beds.ac.uk/10.3390/s21020427