
Detecting Walking Challenges in Gait Patterns Using a Capacitive Sensor Floor and Recurrent Neural Networks


Abstract
:1. Introduction
2. Related Work
2.1. Gait Patterns, Interventions and the Unilateral Heel-Rise Test
2.2. Sensors for Gait and Behaviour Analysis
2.3. Recurrent Neural Networks for Time Series Analysis
3. Methods
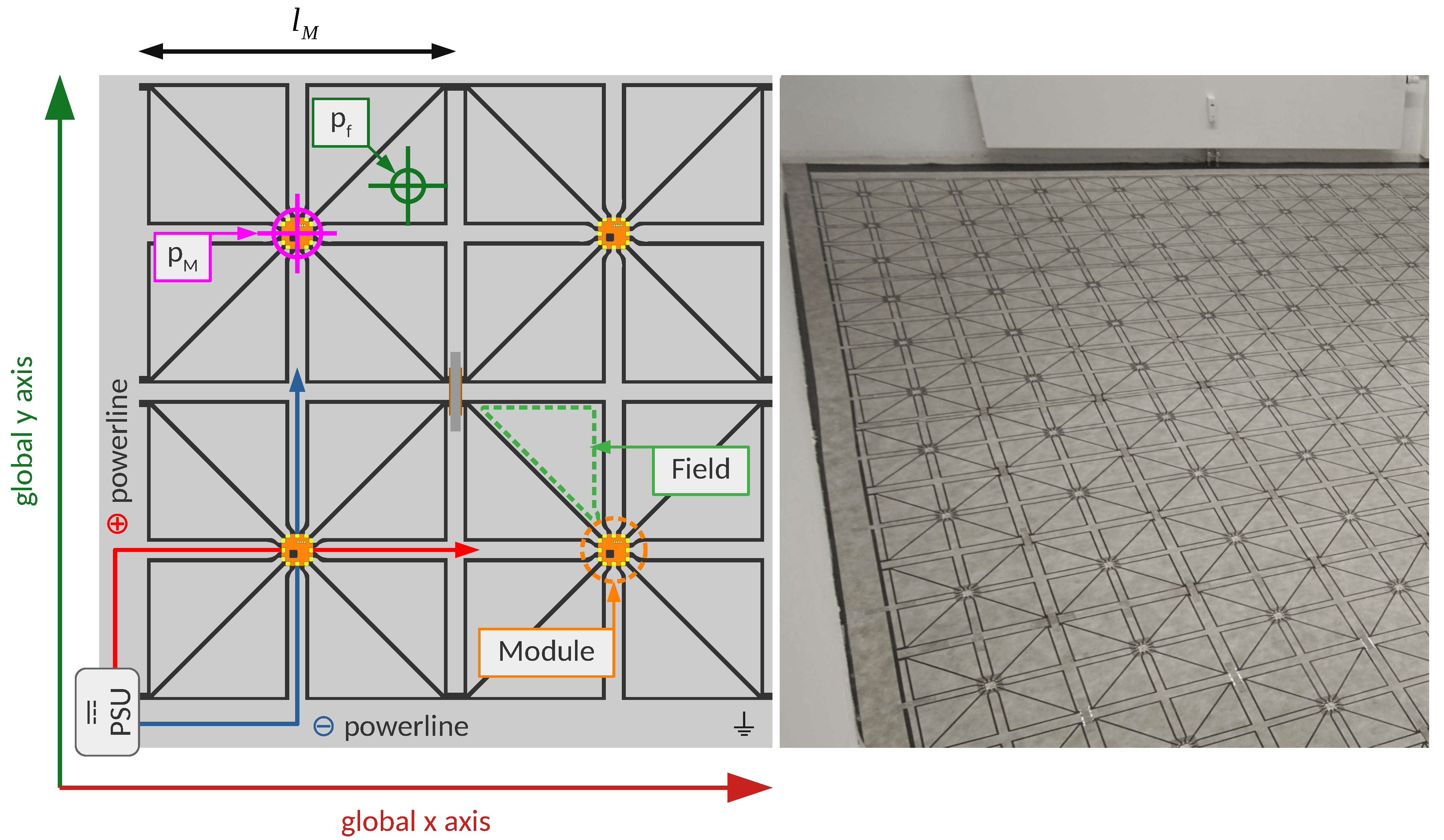
3.1. Capacitive Floor Sensor
3.2. From Sensfloor Messages to the State of Electric Capacitances
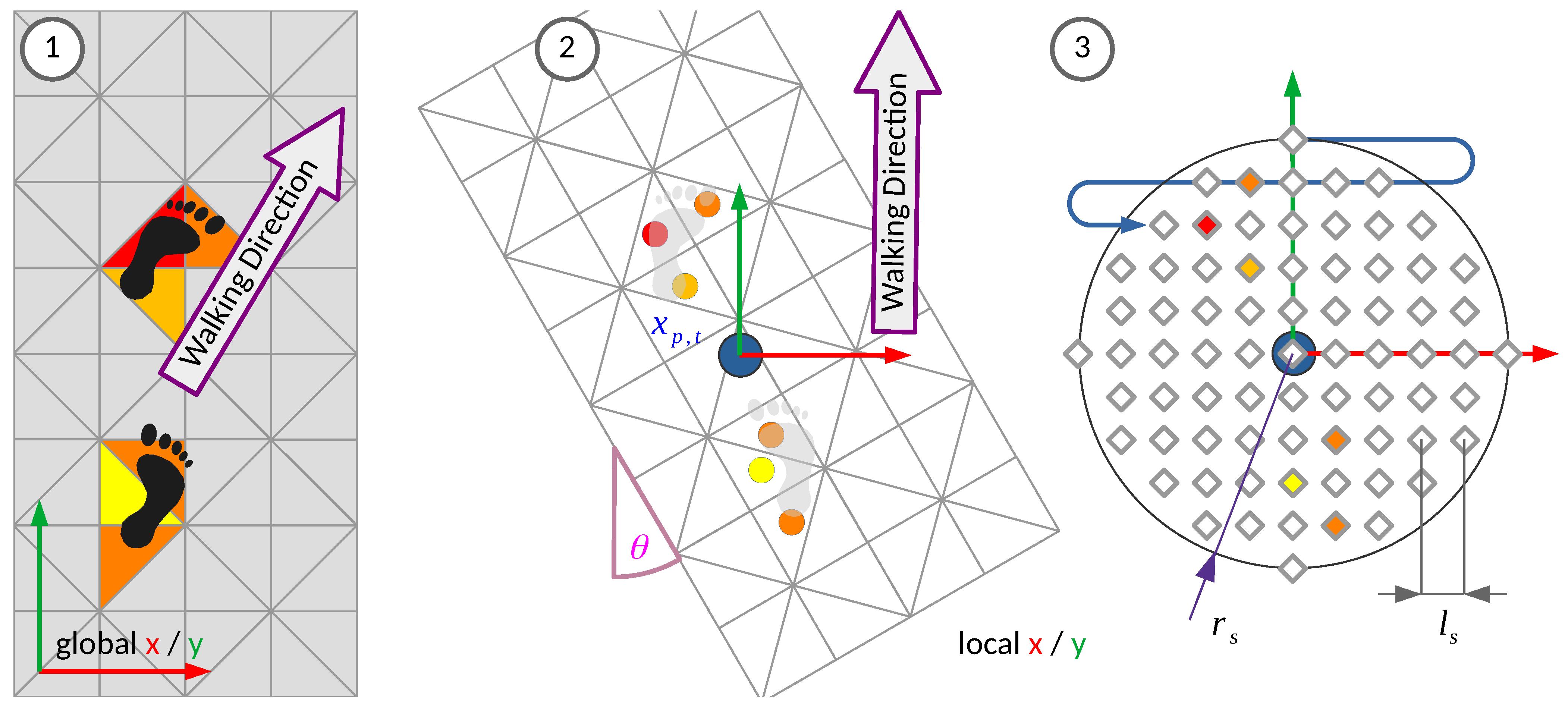
3.3. Transformation to Local Coordinates
3.4. Data Collection
3.5. Data Analysis
4. Results
4.1. Results for Predicting the Walking Mode—Idiosyncratic
4.2. Results for Predicting the Walking Mode—Generalised
4.3. Results for Predicting the UHR Repetitions
5. Discussion
5.1. Summary
5.2. Interpretation
5.3. Limitations
5.4. Implications and Outlook
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| APPS Lab | Assessment of Physiological and Psychological Signals Lab |
| IMU | Inertial Measurement Unit |
| ISM | Industrial, Scientific and Medical Band |
| LSTM | Long Short-Term Memory |
| LOOCV | Leave-One-Out-Cross-Validation |
| PSU | Power Supply Unit |
| ReLU | Rectified Linear Unit |
| RNN | Recurrent Neural Network |
| RGB-D | Red, Green, Blue, Depth |
| ROS | Robot Operating System |
| SD | Standard Deviation |
| UHR | Unilateral Heel-Rise Test |
References
- Shumway-Cook, A.; Woollacott, M.H. Motor Control: Translating Research into Clinical Practice; Lippincott Williams & Wilkins: Philadelphia, PA, USA, 2017. [Google Scholar]
- Götz-Neumann, K. Gehen Verstehen: Ganganalyse in der Physiotherapie; Georg Thieme Verlag: Stuttgart, Germany, 2006. [Google Scholar]
- Hoffmann, R.; Lauterbach, C.; Techmer, A.; Conradt, J.; Steinhage, A. Recognising Gait Patterns of People in Risk of Falling with a Multi-Layer Perceptron. In Conference of Information Technologies in Biomedicine; Piętka, E., Badura, P., Kawa, J., Wieclawek, W., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 87–97. [Google Scholar] [CrossRef]
- Beurskens, R.; Steinberg, F.; Gutmann, F.; Wolff, W.; Granacher, U. Neural Correlates of Dual-Task Walking: Effects of Cognitive versus Motor Interference in Young Adults. Neural Plast. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Kimura, N.; van Deursen, R. The Effect of Visual Dual-Tasking Interference on Walking in Healthy Young Adults. Gait Posture 2020, 79, 80–85. [Google Scholar] [CrossRef]
- Helbostad, J.L.; Vereijken, B.; Hesseberg, K.; Sletvold, O. Altered Vision Destabilizes Gait in Older Persons. Gait Posture 2009, 30, 233–238. [Google Scholar] [CrossRef]
- Kanzler, C.M.; Barth, J.; Klucken, J.; Eskofier, B.M. Inertial Sensor Based Gait Analysis Discriminates Subjects with and without Visual Impairment Caused by Simulated Macular Degeneration. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 4979–4982. [Google Scholar] [CrossRef]
- McIsaac, T.L.; Lamberg, E.M.; Muratori, L.M. Building a Framework for a Dual Task Taxonomy. BioMed Res. Int. 2015, 2015, 591475. [Google Scholar] [CrossRef]
- Bonetti, L.V.; Hassan, S.A.; Kasawara, K.T.; Reid, W.D. The Effect of Mental Tracking Task on Spatiotemporal Gait Parameters in Healthy Younger and Middle- and Older Aged Participants during Dual Tasking. Exp. Brain Res. 2019, 237, 3123–3132. [Google Scholar] [CrossRef]
- Hollman, J.H.; Childs, K.B.; McNeil, M.L.; Mueller, A.C.; Quilter, C.M.; Youdas, J.W. Number of Strides Required for Reliable Measurements of Pace, Rhythm and Variability Parameters of Gait during Normal and Dual Task Walking in Older Individuals. Gait Posture 2010, 32, 23–28. [Google Scholar] [CrossRef]
- Hollman, J.H.; Kovash, F.M.; Kubik, J.J.; Linbo, R.A. Age-Related Differences in Spatiotemporal Markers of Gait Stability during Dual Task Walking. Gait Posture 2007, 26, 113–119. [Google Scholar] [CrossRef]
- Bok, S.K.; Lee, T.H.; Lee, S.S. The Effects of Changes of Ankle Strength and Range of Motion According to Aging on Balance. Ann. Rehabil. Med. 2013. [Google Scholar] [CrossRef]
- Hashish, R.; Samarawickrame, S.D.; Wang, M.Y.; Yu, S.S.Y.; Salem, G.J. The Association between Unilateral Heel-Rise Performance with Static and Dynamic Balance in Community Dwelling Older Adults. Geriatr. Nurs. 2015, 36, 30–34. [Google Scholar] [CrossRef] [Green Version]
- Maritz, C.A.; Silbernagel, K.G. A Prospective Cohort Study on the Effect of a Balance Training Program, Including Calf Muscle Strengthening, in Community-Dwelling Older Adults. J. Geriatr. Phys. Ther. 2016, 39, 125–131. [Google Scholar] [CrossRef]
- Lunsford, B.R.; Perry, J. The Standing Heel-Rise Test for Ankle Plantar Flexion: Criterion for Normal. Phys. Ther. 1995, 75, 694–698. [Google Scholar] [CrossRef]
- Pires, I.M.; Ponciano, V.; Garcia, N.M.; Zdravevski, E. Analysis of the Results of Heel-Rise Test with Sensors: A Systematic Review. Electronics 2020, 9, 1154. [Google Scholar] [CrossRef]
- Jan, M.H.; Chai, H.M.; Lin, Y.F.; Lin, J.C.H.; Tsai, L.Y.; Ou, Y.C.; Lin, D.H. Effects of Age and Sex on the Results of an Ankle Plantar-Flexor Manual Muscle Test. Phys. Ther. 2005, 85, 1078–1084. [Google Scholar] [CrossRef] [Green Version]
- Marey, E.J. La Méthode Graphique dans les Sciences Expérimentales et Particulièrement en Physiologie et en Médecine; G. Masson: Paris, France, 1878. [Google Scholar]
- Marey, E.J. Movement; Arno Press: New York, NY, USA, 1972. [Google Scholar]
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. A Non-Linear View Transformations Model for Cross-View Gait Recognition. Neurocomputing 2020, 402, 100–111. [Google Scholar] [CrossRef]
- Rocha, A.P.; Choupina, H.; Fernandes, J.M.; Rosas, M.J.; Vaz, R.; Cunha, J.P.S. Parkinson’s Disease Assessment Based on Gait Analysis Using an Innovative RGB-D Camera System. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 3126–3129. [Google Scholar] [CrossRef]
- Muñoz, B.; Castaño-Pino, Y.J.; Paredes, J.D.A.; Navarro, A. Automated Gait Analysis Using a Kinect Camera and Wavelets. In Proceedings of the 2018 IEEE 20th International Conference on E-Health Networking, Applications and Services (Healthcom), Ostrava, Czech Republic, 17–20 September 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Grobelny, A.; Behrens, J.R.; Mertens, S.; Otte, K.; Mansow-Model, S.; Krüger, T.; Gusho, E.; Bellmann-Strobl, J.; Paul, F.; Brandt, A.U.; et al. Maximum Walking Speed in Multiple Sclerosis Assessed with Visual Perceptive Computing. PLoS ONE 2017, 12, e0189281. [Google Scholar] [CrossRef] [Green Version]
- Summa, S.; Tartarisco, G.; Favetta, M.; Buzachis, A.; Romano, A.; Bernava, G.M.; Sancesario, A.; Vasco, G.; Pioggia, G.; Petrarca, M.; et al. Validation of Low-Cost System for Gait Assessment in Children with Ataxia. Comput. Methods Progr. Biomed. 2020, 196, 105705. [Google Scholar] [CrossRef]
- Ma, Y.; Mithraratne, K.; Wilson, N.C.; Wang, X.; Ma, Y.; Zhang, Y. The Validity and Reliability of a Kinect V2-Based Gait Analysis System for Children with Cerebral Palsy. Sensors 2019, 19, 1660. [Google Scholar] [CrossRef] [Green Version]
- McDonough, A.L.; Batavia, M.; Chen, F.C.; Kwon, S.; Ziai, J. The Validity and Reliability of the GAITRite System’s Measurements: A Preliminary Evaluation. Arch. Phys. Med. Rehabil. 2001, 82, 419–425. [Google Scholar] [CrossRef] [Green Version]
- Webster, K.E.; Wittwer, J.E.; Feller, J.A. Validity of the GAITRite Walkway System for the Measurement of Averaged and Individual Step Parameters of Gait. Gait Posture 2005, 22, 317–321. [Google Scholar] [CrossRef]
- van Uden, C.J.; Besser, M.P. Test-Retest Reliability of Temporal and Spatial Gait Characteristics Measured with an Instrumented Walkway System (GAITRite). BMC Musculoskelet. Disord. 2004, 5, 13. [Google Scholar] [CrossRef]
- Menz, H.B.; Latt, M.D.; Tiedemann, A.; Mun San Kwan, M.; Lord, S.R. Reliability of the GAITRite Walkway System for the Quantification of Temporo-Spatial Parameters of Gait in Young and Older People. Gait Posture 2004, 20, 20–25. [Google Scholar] [CrossRef]
- Bilney, B.; Morris, M.; Webster, K. Concurrent Related Validity of the GAITRite Walkway System for Quantification of the Spatial and Temporal Parameters of Gait. Gait Posture 2003, 17, 68–74. [Google Scholar] [CrossRef]
- Tanaka, O.; Ryu, T.; Hayashida, A.; Moshnyaga, V.G.; Hashimoto, K. A Smart Carpet Design for Monitoring People with Dementia. In Progress in Systems Engineering; Selvaraj, H., Zydek, D., Chmaj, G., Eds.; Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzerland, 2015; pp. 653–659. [Google Scholar] [CrossRef]
- Serra, R.; Knittel, D.; Di Croce, P.; Peres, R. Activity Recognition With Smart Polymer Floor Sensor: Application to Human Footstep Recognition. IEEE Sens. J. 2016, 16, 5757–5775. [Google Scholar] [CrossRef]
- Henry, R.; Matti, L.; Raimo, S. Human Tracking Using near Field Imaging. In Proceedings of the 2008 Second International Conference on Pervasive Computing Technologies for Healthcare, Tampere, Finland, 30 January–1 February 2008; pp. 148–151. [Google Scholar] [CrossRef]
- Ropponen, A.; Rimminen, H.; Sepponen, R. Robust System for Indoor Localisation and Identification for the Health Care Environment. Wirel. Pers. Commun. 2011, 59, 57–71. [Google Scholar] [CrossRef] [Green Version]
- Beevi, F.H.A.; Wagner, S.; Hallerstede, S.; Pedersen, C.F. Data Quality Oriented Taxonomy of Ambient Assisted Living Systems. In Proceedings of the IET International Conference on Technologies for Active and Assisted Living (TechAAL), London, UK, 5 November 2015; p. 6. [Google Scholar] [CrossRef]
- Bagarotti, R.; Zini, E.M.; Salvi, E.; Sacchi, L.; Quaglini, S.; Lanzola, G. An Algorithm for Estimating Gait Parameters Through a Commercial Sensorized Carpet. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; IEEE: Palermo, Italy, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Steinhage, A.; Lauterbach, C. SensFloor and NaviFloor: Large-Area Sensor Systems Beneath Your Feet. In Handbook of Research on Ambient Intelligence and Smart Environments: Trends and Perspectives; Information Science Reference: Hershey, PA, USA, 2011. [Google Scholar] [CrossRef] [Green Version]
- Lauterbach, C.; Steinhage, A.; Techmer, A. A Large-Area Sensor System Underneath the Floor for Ambient Assisted Living Applications. In Pervasive and Mobile Sensing and Computing for Healthcare: Technological and Social Issues; Mukhopadhyay, S.C., Postolache, O.A., Eds.; Smart Sensors, Measurement and Instrumentation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 69–87. [Google Scholar] [CrossRef]
- Sousa, M.; Techmer, A.; Steinhage, A.; Lauterbach, C.; Lukowicz, P. Human Tracking and Identification Using a Sensitive Floor and Wearable Accelerometers. In Proceedings of the 2013 IEEE International Conference on Pervasive Computing and Communications (PerCom), San Diego, CA, USA, 18–22 March 2013; pp. 166–171. [Google Scholar] [CrossRef]
- Steinhage, A.; Lauterbach, C. SensFloor and NaviFloor: Robotics Applications for a Large-Area Sensor System. Int. J. Intell. Mechatron. Robot. (IJIMR) 2013, 3. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, R.; Steinhage, A.; Lauterbach, C. C5.4—Increasing the Reliability of Applications in AAL by Distinguishing Moving Persons from Pets by Means of a Sensor Floor. Proc. Sens. 2015, 436–440. [Google Scholar] [CrossRef]
- Lauterbach, C.; Steinhage, A.; Techmer, A.; Sousa, M.; Hoffmann, R. AAL Functions for Home Care and Security: A Sensor Floor Supports Residents and Carers. Curr. Dir. Biomed. Eng. 2018, 4, 127–129. [Google Scholar] [CrossRef]
- Hoffmann, R.; Lauterbach, C.; Conradt, J.; Steinhage, A. Estimating a Person’s Age from Walking over a Sensor Floor. Comput. Biol. Med. 2018, 95, 271–276. [Google Scholar] [CrossRef]
- Steinhage, A.; Lauterbach, C.; Techmer, A.; Hoffmann, R.; Sousa, M. Innovative Features and Applications Provided by a Large-Area Sensor Floor. In Handbook of Research on Investigations in Artificial Life Research and Development; Engineering Science Reference: Hershey, PA, USA, 2018. [Google Scholar] [CrossRef]
- Learning Representations by Back-Propagating Errors. Nature 1986, 323, 533–536. [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Lipton, Z.C.; Berkowitz, J.; Elkan, C. A Critical Review of Recurrent Neural Networks for Sequence Learning. arXiv 2015, arXiv:1506.00019. [Google Scholar]
- Sak, H.; Senior, A.; Rao, K.; Beaufays, F. Fast and Accurate Recurrent Neural Network Acoustic Models for Speech Recognition. arXiv 2015, arXiv:1507.06947. [Google Scholar]
- Sak, H.; Senior, A.; Beaufays, F. Long Short-Term Memory Based Recurrent Neural Network Architectures for Large Vocabulary Speech Recognition. arXiv 2014, arXiv:1402.1128. [Google Scholar]
- Graves, A.; Mohamed, A.R.; Hinton, G. Speech Recognition with Deep Recurrent Neural Networks. arXiv 2013, arXiv:1303.5778. [Google Scholar]
- Graves, A.; Schmidhuber, J. Offline Handwriting Recognition with Multidimensional Recurrent Neural Networks. In Advances in Neural Information Processing Systems 21; Koller, D., Schuurmans, D., Bengio, Y., Bottou, L., Eds.; Curran Associates Inc.: Red Hook, NY, USA, 2009; pp. 545–552. [Google Scholar]
- Rosenblatt, F. Principles of Neurodynamics: Perceptrons and the Theory of Brain Mechanisms. Am. J. Psychol. 1963, 76, 705–707. [Google Scholar] [CrossRef] [Green Version]
- Fukumizu, K. Active Learning in Multilayer Perceptrons. In Proceedings of the Advances in Neural Information Processing Systems, Denver, CO, USA, 27–30 November 1995; p. 7. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A System for Large-Scale Machine Learning. arxiv 2016, arXiv:1605.08695. [Google Scholar]
- Sman, A.D.; Hiller, C.E.; Imer, A.; Ocsing, A.; Burns, J.; Refshauge, K.M. Design and Reliability of a Novel Heel Rise Test Measuring Device for Plantarflexion Endurance. BioMed Res. Int. 2014, 2014, 391646. [Google Scholar] [CrossRef]
- Washabaugh, E.P.; Kalyanaraman, T.; Adamczyk, P.G.; Claflin, E.S.; Krishnan, C. Validity and Repeatability of Inertial Measurement Units for Measuring Gait Parameters. Gait Posture 2017, 55, 87–93. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Accuracy | Precision | Recall | Score |
|---|---|---|---|---|
| normal vs. closed-eyes | 0.77 | 0.80 | 0.80 | 0.80 |
| normal vs. dual-task | 0.56 | 0.58 | 0.58 | 0.58 |
| normal vs. post uhr | 0.50 | 0.48 | 0.46 | 0.47 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hoffmann, R.; Brodowski, H.; Steinhage, A.; Grzegorzek, M. Detecting Walking Challenges in Gait Patterns Using a Capacitive Sensor Floor and Recurrent Neural Networks. Sensors 2021, 21, 1086. https://0-doi-org.brum.beds.ac.uk/10.3390/s21041086
Hoffmann R, Brodowski H, Steinhage A, Grzegorzek M. Detecting Walking Challenges in Gait Patterns Using a Capacitive Sensor Floor and Recurrent Neural Networks. Sensors. 2021; 21(4):1086. https://0-doi-org.brum.beds.ac.uk/10.3390/s21041086
Chicago/Turabian StyleHoffmann, Raoul, Hanna Brodowski, Axel Steinhage, and Marcin Grzegorzek. 2021. "Detecting Walking Challenges in Gait Patterns Using a Capacitive Sensor Floor and Recurrent Neural Networks" Sensors 21, no. 4: 1086. https://0-doi-org.brum.beds.ac.uk/10.3390/s21041086