
Angle-of-Arrival Estimation Using Difference Beams in Localized Hybrid Arrays


School of Electronics and Information, Hangzhou Dianzi University, Hangzhou 310018, China
*
Author to whom correspondence should be addressed.
Sensors 2021, 21(5), 1901; https://0-doi-org.brum.beds.ac.uk/10.3390/s21051901
Submission received: 26 January 2021
/
Revised: 15 February 2021
/
Accepted: 22 February 2021
/
Published: 9 March 2021
(This article belongs to the Special Issue Communications and Sensing Technologies for the Future)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Angle-of-arrival (AoA) estimation in localized hybrid arrays suffers from phase ambiguity owing to its localized structure and vulnerability to noise. In this letter, we propose a novel phase shift design, allowing each subarray to exploit difference beam steering in two potential AoA directions. This enables the calibration of cross-correlations and an enhanced phase offset estimation between adjacent subarrays. We propose two unambiguous AoA estimation schemes based on the even and odd ratios of the number of antennas per subarray N to the number of different phase shifts per symbol K (i.e., ), respectively. The simulation results show that the proposed approach greatly improves the estimation accuracy as compared to the state of the art when the ratio is even.
1. Introduction
Due to the superior balance between performance and cost, a hybrid antenna array is regarded as an excellent candidate for millimeter wave (mmWave) communication systems [1,2]. Typically, the hybrid array is composed of multiple analog subarrays with phase controllable antenna elements. It includes two kinds of conventional configurations, i.e., localized and interleaved arrays in the light of the topology of subarrays. As the localized array is easier for schematic design and hardware implementation, it is more suitable for building a massive array. Angle-of-arrival (AoA) acquisition of the incoming mmWave signal is of considerable importance for signal reception, since the mmWave channels are dominated by the line-of-sight (LOS) propagation. A wide range of its applications including localization and tracking to mmWave communication systems, e.g., 5G mmWave cellular networks [2] and satellite-borne communications [1], have been increasingly studied in recent years.
AoA estimation using a localized array suffers from the phase ambiguity problem, which has been progressively studied in [3,4,5,6,7]. Each of these solutions leverages the cross-correlations between neighbouring subarrays for an AoA estimate. Phase ambiguity stems from an undetermined integer multiple of between and the argument of cross-correlations, where N is the number of antennas in a subarray, , the elevation AoA, the wavelength, and d the adjacent antenna spacing. With the identical phase shift deployment over all subarrays for constructive combination of cross-correlations, the work in [4] proposed a differential beam search algorithm to go through all possible beams and determine u with the largest output power. However, it incurs a long scanning period that linearly increases with the length of a subframe and N. To avoid a long scanning period, the authors in [5] studied a phase shift configuration with different values in different subarrays to eliminate the ambiguity by directly estimating u. Their ingenious idea is that (1) is estimated by rectifying the signs of cross-correlations and then combining them coherently; (2) After calibrating subarray output signals with the estimated , one takes their inverse discrete Fourier transform (IDFT) and calculates the correlations of the Fourier coefficients to uniquely recover u. The work in [3,6] further generalized the phase shift design in [5] to narrowband and wideband systems respectively, and revealed that the strongest cross-correlation takes the opposite sign from the remaining cross-correlations. Following this finding with an improved calibration accuracy of cross-correlations, the AoA can be speedily and reliably estimated even in low signal-to-noise ratio (SNR) regimes. In [7], an enhanced AoA estimation for a polarized mmWave signal was studied using a localized hybrid dual-polarized array, where polarization diversity combining was employed to improve the estimation of phase offset between adjacent subarrays. With the cross-correlation based algorithm, a multi-AoA estimation scheme with a combiner design was proposed in [8], where the paths for different users are identified by exploiting the low correlation property of the pseudo-random sequences.
With a digital array, MUSIC and ESPRIT [9] are the classical methods used in high-resolution AoA estimation. The work in [10,11] applied them to a localized array. Although accurate estimation can be achieved, the computational complexity incurred from singular value decomposition grows cubically with the total number of antennas [6], which makes the applications of these methods impractical in mmWave massive arrays. In [12], an auxiliary beam pair (ABP) design was proposed to provide high-resolution AoA estimation via amplitude comparison relating to each ABP. It, however, needs to scan all the directions of interest exhaustively, and the resolution is subject to the beamwidth and SNR. In [13], the optimal sum and difference beamformers based AoA estimator was constructed by exploiting the ratio of difference pattern to sum pattern with two overlapping subarrays, which can achieve the minimum estimation variance under Gaussian noise, regardless of any nulling performed. The work in [14] uses hierarchical search in the designed multi-resolution codebook to promptly identify one single multipath component (MPC) and thus the AoA. A compressed sensing based method was further investigated in [15] to find multiple MPCs, exploiting the sparse nature of mmWave channels. The beam needs to be recurrently narrowed down according to the codebook, which incurs additional overhead.
In this paper, we propose a novel phase shift design to enable unambiguous AoA estimation using a localized array. Instead of generating multiple single beams as proposed in [3,4,5,6,7], a difference beam based phase shift configuration is designed to steer each subarray in two directions. This can effectively improve the performance in terms of mean square error (MSE) of estimation and detection probability of the expected subarray index by providing better coverage of the directions of interest. Based on the derivation in terms of the even and odd ratios of where K is the different phase shifts per symbol, two IDFT-and-correlation based estimation schemes are proposed to directly estimate the AoA. Simulation results show the effectiveness of the proposed approach in estimation accuracy.
2. System Models
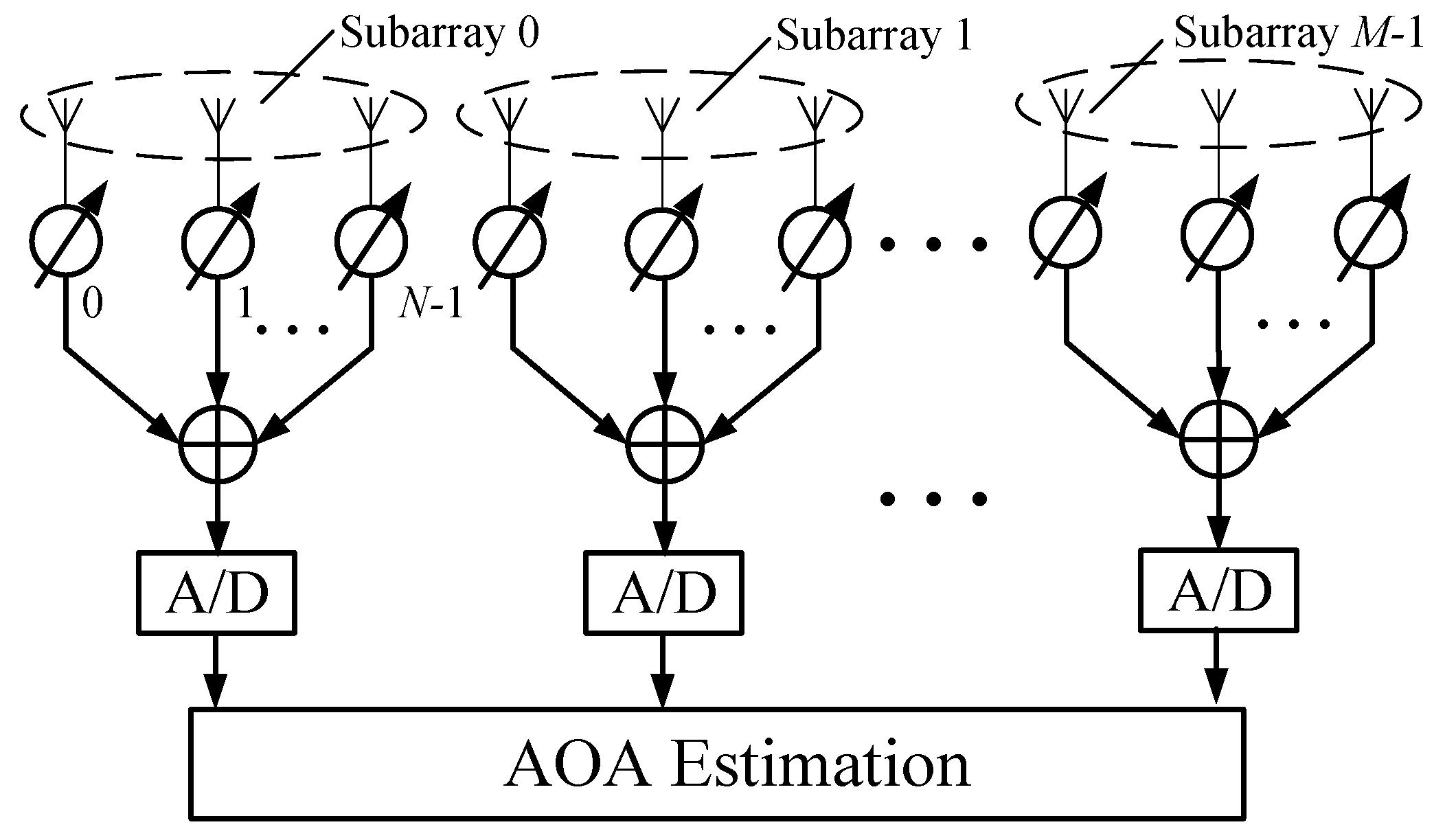
As illustrated in Figure 1, we consider a uniform linear localized array composed of M subarrays, each with N evenly spaced phase-tunable antenna elements. Assume the arriving information-bearing signal with wavelength and elevation angle . The received signals at the mth subarray () are combined after phase shifting, and then the analog beamformed signal is down-converted to baseband. Through analog-to-digital conversions, the output signal is given by [6]
where is the zero-mean additive white Gaussian noise (AWGN) at the output of the mth subarray with power ; is the radiation pattern of the mth subarray at time t given by
where denotes the radiation pattern of the nth antenna element () at the mth subarray. As in [5,6], we assume ; represents the phase shift of the corresponding antenna element at time t and .
Let denote the cross-correlation between the output signals of the mth and ()th subarrays given by
where and represent the conjugate and absolute value of , respectively; is approximated as an AWGN.
In [4], identical phase shifts are used in all the subarrays, i.e., for any m, the values of , ..., form the same arithmetic progression, such that in (3) can be estimated by taking the argument of . However, since can be outside the range , the determination of u from the estimate of () will lead to phase ambiguity, i.e., there are possible estimates of u, given by , , where denotes the floor function. As a result, all possible directions need to be tested by applying a scanning beam within a long scanning frame, in order to find the one with the largest signal power, and thus incurring excessive delays.
3. Proposed AOA Estimation Approach
In this section, phase shifts providing difference beams are designed to facilitate the phase offset estimation between adjacent subarrays. Two AoA estimation schemes are proposed for direct AoA acquisition according to the value of , where K is the number of different phase shifts for any symbol.
3.1. Phase Shift Design
Let the nth phase shift of the mth subarray at the tth () symbol be given by
where , represents the modulo operation, and thus indicates that varies periodically every K subarrays in one symbol; K takes a value from and , where N is assumed to be an even number and Q is an integer; T is the number of training symbols; is the total number of different phase shifts used in the system. The setting given by (4) is able to make the array scan potential directions within across T symbols, ensuring that the AoA is acquired by at least one of the L beams with high gain. Note that it is necessary to have the mainlobes of two difference beams to cover the AoA so that sufficient energy can be obtained when computing the cross-correlation to estimate the AoA. According to the sampling theorem, at least N scanning beams are required to cover the AoA range of given the number of antennas per subarray N. Generally, the proper values of N, K and T are supposed to be set to satisfy for good AoA coverage with beamforming gains.
Unlike the phase shift design in [6] that leverages multiple sum beams to steer multiple evenly distributed directions within , the proposed one can steer double directions using each subarray by exploiting the difference beams [12]. Each difference beam steers a null towards the boresight of the corresponding sum beam. An example of normalized beam patterns within the first symbol period are shown in Figure 2, where the red solid and black dotted curves represent the synthesized difference beams and sum beams, respectively. In this example, we adopt and , and therefore the phase shifter values of subarray m for difference beams are set to be for and for , while for sum beams, for . When multiple training symbols are used, both null-steering direction and phase shifts are rotated by between every two consecutive symbols. Although the maximal beamforming gain of a difference beam is 3 dB lower than that of a sum beam, multiple difference beams across multiple training symbols overlap in some directions of interest, which can make up for the beamforming gain loss.
3.2. Estimation of
We apply Equation (4) to the estimation of , which is then used to suppress of in (1) followed by the estimation of u. Substituting Equation (4) into Equation (2), we have
where . For convenience of illustration, we consider the first K subarrays even though the results apply to the remaining subarrays. Therefore, is simplified as .
As specified in Lemma 1 [6], there exists a unique integer satisfying . Given , we have
since . Considering two cases of Q, i.e., even and odd, we have
Furthermore, as stated in Lemma 2 [6] that , , only with the largest amplitude has the opposite sign of the remaining since the numerator of does not change with m. As a result, when the SNR is not very low, can be determined by with the largest amplitude, i.e., . Given , the signs of () can be aligned following for , where is the indicator function. Note that, from the expression of , we have () while ignoring in Equation (6), and hence the signs of can be further calibrated following Step 7 in Algorithm 1. As shown in Step 9 of Algorithm 1, across all subarrays and symbols can be coherently combined to improve the accuracy of .
3.3. Estimation of u
Next, we perform the estimation of u in terms of Q being even or odd as follows.
(I) When Q is even, letting , , , Equation (5) can be written as
where
are the Fourier coefficients of .
| Algorithm 1 Estimation of |
Input:
, , ;
|
Given , we calibrate by multiplying , i.e., . Provided that , can be almost perfectly calibrated. Performing the K-point IDFT of produces , where are the K-point IDFT of , .
To obtain an estimate of u, , we compute the cross-correlation between any two adjacent IDFT outputs, , denoted by , , given by
where is approximated as an AWGN. It is observed from Equation (10) that can be unambiguously captured by . Similarly, across all subarrays and symbols can be combined to improve the accuracy of .
(II) When Q is odd, K must be even since N is even. Letting , , , (5) can be written as
Separating to even and odd samples, we have
where . Performing -point IDFT of the even and odd samples of , respectively, and then calculating the cross-correlation between adjacent IDFT outputs, denoted by and , , we have .
The estimation of u is summarized in Algorithm 2, where denotes a vector consisting of the th to th elements of and stands for the transpose of . Note that in Step 12, the samples from the th to the th are concatenated after the samples from the th to the th to constructively estimate u, exploiting the periodicity of the phase shifts designed in (4). As the proposed approach is based on cross-correlation and IDFT computation, its computational complexity is similar to that in [6] given by , which is much lower than the subspace-based methods, e.g., MUSIC or ESPRIT in [10,11] given by .
| Algorithm 2 Estimation of u |
Input:
, , , ;
|
3.4. Discussion on Extension of the Proposed Approach
The proposed approach can be potentially extended to wideband mmWave systems, where each subcarrier or a cluster of subcarriers are assumed to be narrowband, and the proposed approach is performed separately at different subcarriers or clusters. The cross-correlations between subcarriers or clusters can also be exploited to improve the estimation accuracy [3].
The proposed approach can be extended from a linear array to a planar array, where the proposed phase shift design and cross-correlation operation can be applied similarly along the orthogonal dimension. Since the radiation pattern of a planar array can be represented by the product of independent radiation patterns along two orthogonal dimensions, the AoA estimation between them can be decoupled from each other.
The proposed approach can potentially be extended to the case in the presence of nonline-of-sight (NLOS) or interferences from other transmitters. Since the NLOSs are typically much weaker than the LOS, serial interference cancellation could be performed for sequential AoA estimation with the proposed approach. When the AoA of the LOS is estimated, we can steer all beams of subarrays towards this direction, and then evaluate its channel amplitude and phase. By regenerating the LOS signal component and removing it from the received signals in all subarrays, the second strongest path can be estimated. In the same way, the remaining paths can be estimated and subtracted one by one. When there exist multiple interferences with similar power from different directions, the proposed approach could be conducted in terms of parallel interference cancellation, where multiple AoAs are simultaneously estimated and cancelled.
4. Simulation Results
In this section, we present the simulation results to evaluate the proposed approach, compared with the state of the art [6]. Denote the average received SNR per antenna as . The training symbols, , are generated following complex Gaussian distributions with zero mean. Assuming uniformly distributed AoA within , simulation results are obtained by averaging over 50,000 trials. Here, we define as the probability of correctly finding the index at Step 6 of Algorithm 1.
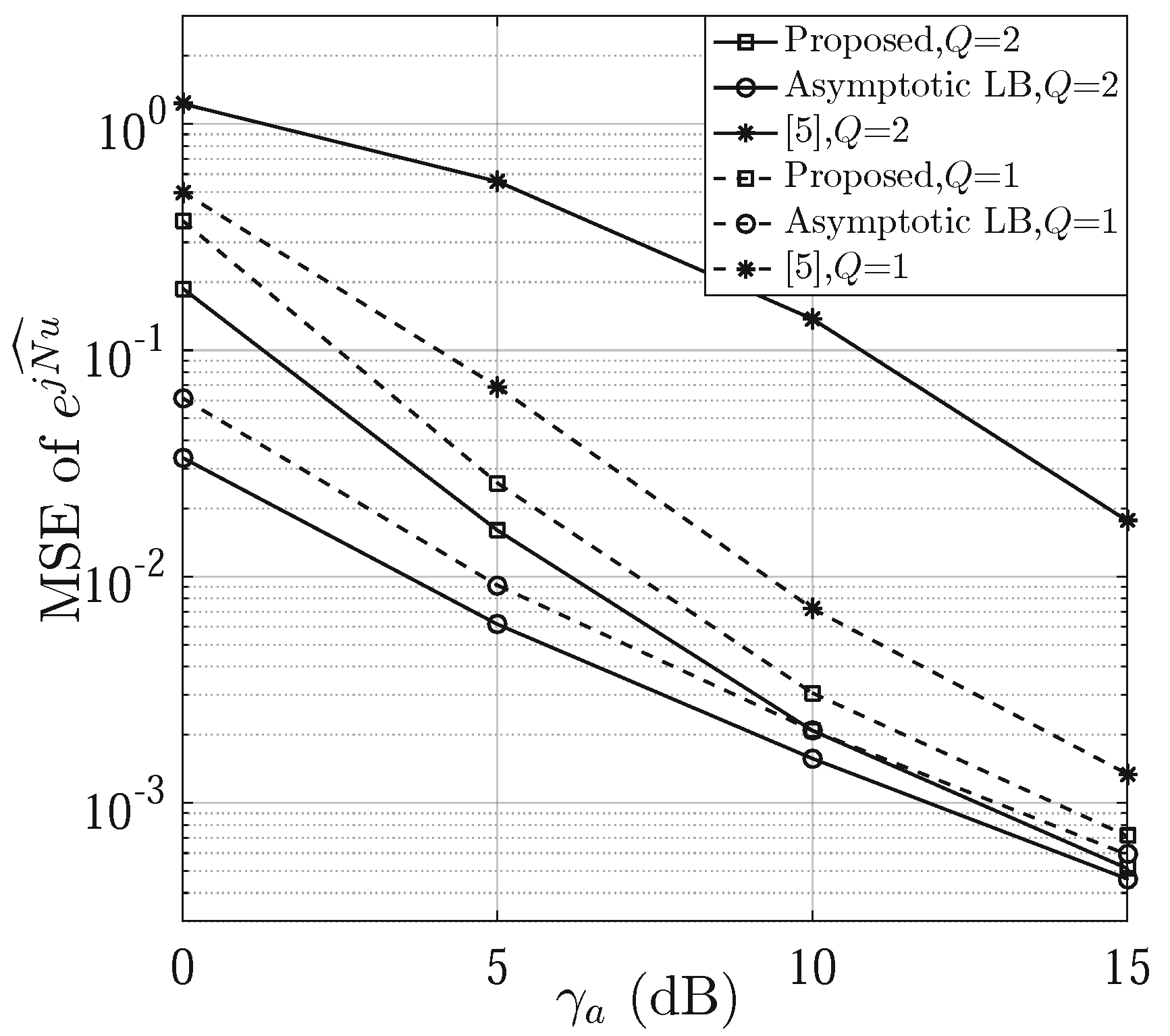
Figure 3 compares the MSEs of versus with and 2. As shown in the figure, the proposed phase shift design outperforms that of [6] in terms of MSE of , since a higher SNR for can be achieved at Step 9 of Algorithm 1. The MSE curve of becomes increasingly tight to its asymptotic lower bound with the increase of , where the asymptotic lower bound is the lower bound of proposed approach produced under the assumption of . There is more gain with than in comparison with [6], which indicates that the proposed scheme is more applicable to narrow beams, i.e., large N. This is because multiple narrower single beams cannot provide desirable AoA coverage, resulting in estimation performance loss, which, however, can be compensated by our phase shift design.
Figure 4 shows versus with different values of Q. We can see that the proposed scheme generally has better performance. At high SNRs, it achieves higher with , while it is inferior to that of [6] when SNR is low. Note that, compared with that in [6], our proposed phase shift design improves the capability of identifying the correct , thus effectively suppressing the noise and indirectly improving the SNR of estimation. When is greater than 5 dB, the proposed one leads to a higher with a smaller Q. This is because, when the number of beams is fixed within one symbol period, a smaller N, and hence a wider beam, leads to a better coverage of the directions of interest. Therefore, it is easier to find the correct .
The MSEs of are shown as a function of Q in Figure 5. It can be seen that its MSEs generally increase with Q attributed to the decreasing number of subarrays. The proposed approach generally achieves better performance than [6] when Q is an even number. When Q is odd, the proposed method results in larger estimation errors since the signals are only averaged over product terms (see Step 22 of Algorithm 2), less than in [6]. The corresponding asymptotic lower bound of MSEs of are displayed for comparison. To evaluate the credibility of estimation errors, we calculate 95% confidence intervals (CIs) for . When dB and , 4 and 6, the CIs are given by [–0.0207, 0.0111], [–0.0204, 0.0114] and [–0.0244, 0.0075] for the proposed one, [–0.0219, 0.0099], [–0.0258, 0.0060] and [–0.0224, 0.0096] for [6], [–0.0205, 0.0113], [–0.0232, 0.0086] and [–0.0213, 0.0104] for the asymptotic lower bound, respectively. The MSEs of in Rician fading channels [12] are also provided to show the impact of multipath channels on the proposed approach, where the Rician factor is assumed to be 10 dB. Figure 6 presents the MSE of versus with even values of Q. From the figure, we can see that the proposed approach outperforms [6] by 1.4 dB at the MSE of 0.1, 0.4 dB at the MSE of 0.01 and 0.7 dB at the MSE of 0.001, respectively, when Q = 6, 4 and 2.
5. Conclusions
In this letter, we proposed a novel phase shift design to facilitate the estimation of a single AoA in a localized hybrid array. Based on the ratio of the number of antennas per subarray to the number of different phase shifts per symbol being even or odd, we presented two different AoA estimation schemes. Employing difference beam steering in each subarray, the proposed approach can effectively improve the phase offset estimate accuracy between adjacent subarrays, and thus the AoA estimate. Simulation results of MSEs showed that the proposed one achieved better AoA estimation performance over the state of the art when Q is designed to be an even number.
Author Contributions
Writing—original draft, H.L.; Writing—review, editing, Z.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (Grant Nos. 62071163, 91938201 and 61871169), Natural Science Foundation of Zhejiang Province (Grant LZ20F010004) and Project of Ministry of Science and Technology (Grant D20011).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Wu, K.; Ni, W.; Su, T.; Liu, R.; Guo, Y.J. Recent breakthroughs on angle-of-arrival estimation for millimeter-wave high-speed railway communication. IEEE Commun. Mag. 2019, 57, 57–63. [Google Scholar] [CrossRef]
- Zhang, J.A.; Huang, X.; Dyadyuk, V.; Guo, Y.J. Massive hybrid antenna array for millimeter-wave cellular communications. IEEE Wireless Commun. 2015, 22, 79–87. [Google Scholar] [CrossRef]
- Huang, X.; Guo, Y.J.; Bunton, J. A hybrid adaptive antenna array. IEEE Trans. Wireless Commun. 2010, 9, 1770–1779. [Google Scholar] [CrossRef]
- Zhang, J.A.; Ni, W.; Cheng, P.; Lu, Y. Angle-of-arrival estimation using different phase shifts across subarrays in localized hybrid arrays. IEEE Commun. Lett. 2016, 20, 2205–2208. [Google Scholar] [CrossRef]
- Wu, K.; Ni, W.; Su, T.; Liu, R.; Guo, Y.J. Robust unambiguous estimation of angle-of-arrival in hybrid array with localized analog subarrays. IEEE Trans. Wireless Commun. 2018, 17, 2987–3002. [Google Scholar] [CrossRef]
- Wu, K.; Ni, W.; Su, T.; Liu, R.; Guo, Y.J. Fast and accurate estimation of angle-of-arrival for satellite-borne wideband communication system. IEEE J. Sel. Areas Commun. 2018, 36, 314–326. [Google Scholar] [CrossRef]
- Li, H.; Wang, T.Q.; Huang, X.; Zhang, J.A. Enhanced AoA estimation using localized hybrid dual-polarized arrays. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–6. [Google Scholar]
- Ni, Z.; Zhang, J.A.; Yang, K.; Gao, F.; An, J. Estimation of multiple angle-of-arrivals with localized hybrid subarrays for millimeter wave systems. IEEE Trans. Commun. 2020, 68, 1897–1910. [Google Scholar] [CrossRef]
- Godara, L.C. Application of antenna arrays to mobile communications. II. Beam-forming and direction-of-arrival considerations. Proc. IEEE 1997, 85, 1195–1245. [Google Scholar] [CrossRef] [Green Version]
- Chuang, S.-F.; Wu, W.-R.; Liu, Y.-T. High-resolution AoA estimation for hybrid antenna arrays. IEEE Trans. Antennas Propag. 2015, 63, 2955–2968. [Google Scholar] [CrossRef]
- Shu, F.; Qin, Y.; Liu, T.; Gui, L.; Zhang, Y.; Li, J.; Han, Z. Low-complexity and high-resolution DOA estimation for hybrid analog and digital massive MIMO receive array. IEEE Trans. Commun. 2018, 66, 2487–2501. [Google Scholar] [CrossRef] [Green Version]
- Zhu, D.; Choi, J.; Heath, R.W. Auxiliary beam pair enabled AoD and AoA estimation in closed-loop large-scale millimeter-wave MIMO systems. IEEE Trans. Wireless Commun. 2017, 16, 4770–4785. [Google Scholar] [CrossRef]
- Lee, T.-S.; Dai, T.-Y. Optimum beamformers for monopulse angle estimation using overlapping subarrays. IEEE Trans. Antennas Propag. 1994, 42, 651–657. [Google Scholar]
- Xiao, Z.; He, T.; Xia, P.; Xia, X. Hierarchical codebook design for beamforming training in millimeter-wave communication. IEEE Trans. Wireless Commun. 2016, 15, 3380–3392. [Google Scholar] [CrossRef] [Green Version]
- Xiao, Z.; Dong, H.; Bai, L.; Xia, P.; Xia, X. Enhanced channel estimation and codebook design for millimeter-wave communication. IEEE Trans. Veh. Technol. 2018, 67, 9393–9405. [Google Scholar] [CrossRef]
Figure 1.
Illustration of a localized array with M subarrays, where the RF and down conversion components are omitted for simplicity.
Figure 1.
Illustration of a localized array with M subarrays, where the RF and down conversion components are omitted for simplicity.

Figure 2.
An example of normalized synthesized patterns of difference beams and sum beams.

Figure 3.
MSE of versus ( and ).

Figure 4.
versus ( and ).

Figure 5.
MSE of versus Q, ( and ).

Figure 6.
MSE of versus , ( and ).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Li, H.; Cheng, Z. Angle-of-Arrival Estimation Using Difference Beams in Localized Hybrid Arrays. Sensors 2021, 21, 1901. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051901
AMA Style
Li H, Cheng Z. Angle-of-Arrival Estimation Using Difference Beams in Localized Hybrid Arrays. Sensors. 2021; 21(5):1901. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051901
Chicago/Turabian StyleLi, Hang, and Zhiqun Cheng. 2021. "Angle-of-Arrival Estimation Using Difference Beams in Localized Hybrid Arrays" Sensors 21, no. 5: 1901. https://0-doi-org.brum.beds.ac.uk/10.3390/s21051901
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.