1. Introduction
As the demands for automated manufacturing rise, the requirements for precise position control are enhanced. Linear positioning systems are often used in machine tools and robotic applications. Most of the positioning systems are based on optical or magnetic sensing principles. Although the optical positioning systems have higher resolution, the performance, such as accuracy, and the stability are strongly degraded in an unclean environment with the presence of oil and dust. In addition, higher energy consumption and cost are also concerned. In contrast, as the accuracy enhances, the magnetic positioning systems become more competitive due to their high environmental endurance. Furthermore, they require lower power consumption with lower cost and better scalability [
1].
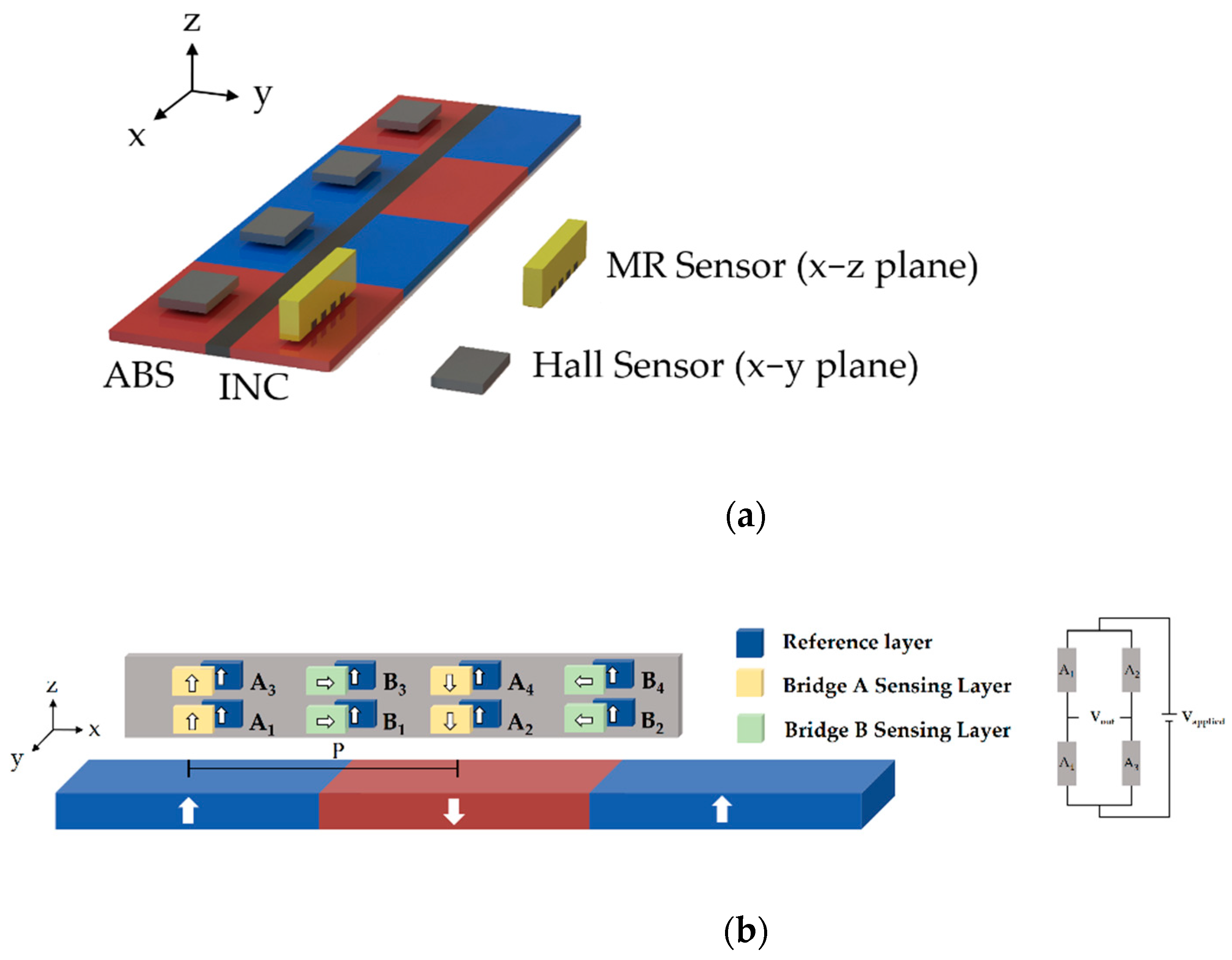
Two types of magnetic positioning systems are commonly used, as shown in
Figure 1a. The magnetic polarities of the absolute-type (ABS) scale are randomly altered. Each position on the ABS scale is assigned a binary code; the decoder is composed of an array of sensors with separation corresponding to the pole pitch. By reading out the polarities of each pole, the absolute position can be obtained by referring the signal to the assigned binary code [
2]. The advantage of the ABS-type encoder is that the absolute position can be known immediately without initialization when rebooting the system [
3]. However, the position resolution is limited by the pole pitch of the scale. In order to know the displacement distance even smaller than the pole pitch, the incremental-type (INC) is applied. The magnetic pattern of the incremental-type (INC) scale is magnetized with alternate polarities. As the sensor goes through the INC scale, the dual Wheatstone bridges in the sensor detect the magnetic flux and generate two analog sinusoidal signals with 90-degree phase shift. With the measured sine/cosine waves, the circular Lissajous curve can be created by plotting the magnitude of the sine wave on the y-axis and the cosine wave on the x-axis [
4]. By dividing the Lissajous circle into many small segments, so-called the interpolation techniques, with readout IC, a displacement much smaller than the pole pitch can be detected [
5,
6]. However, since it only detects the relative displacement, when the system is rebooted, it always takes time to travel back to the starting point for the initialization, which increases the time cost in the manufacturing industry. To obtain the precise displacement without initialization, both scales needs to be used simultaneously. In this work, we use the integrated scale, in which both INC and ABS scales (lines) are magnetized in the perpendicular direction separately, located on the same magnetic matrix.
Figure 1b shows the integrated scale with 1mm pole pitch used in this work. The magnetic pattern of both lines can be observed through the magnetic field viewing film (MFVF).
To detect the position, different magnetic sensors are used for individual lines. Typically, multiple numbers of digital Hall sensor are used to detect the N and S poles for the ABS line, and various magnetoresistance (MR) sensors, including anisotropic magnetoresistance (AMR), giant magnetoresistance (GMR), and tunneling magnetoresistance (TMR) sensors, are used to detect the angular change of the field and generate the sinusoidal output signal for the INC line due to their larger signals compared with Hall sensors [
7,
8,
9]. However, the good alignment between sensors needs to be considered, which is difficult to be achieved with surface mount assembly process and installation. For alignment between the sensors in ABS, if one of the sensors is slightly offset from the designated position, the non-synchronized ABS position information causes the misreading of the absolute positional code, leading to a false interpretation. On the other hand, if the misalignment occurs between sensors for ABS and INC, it takes efforts to compensate the misalignment through signal processing, which is not an efficient way for the commercial products.
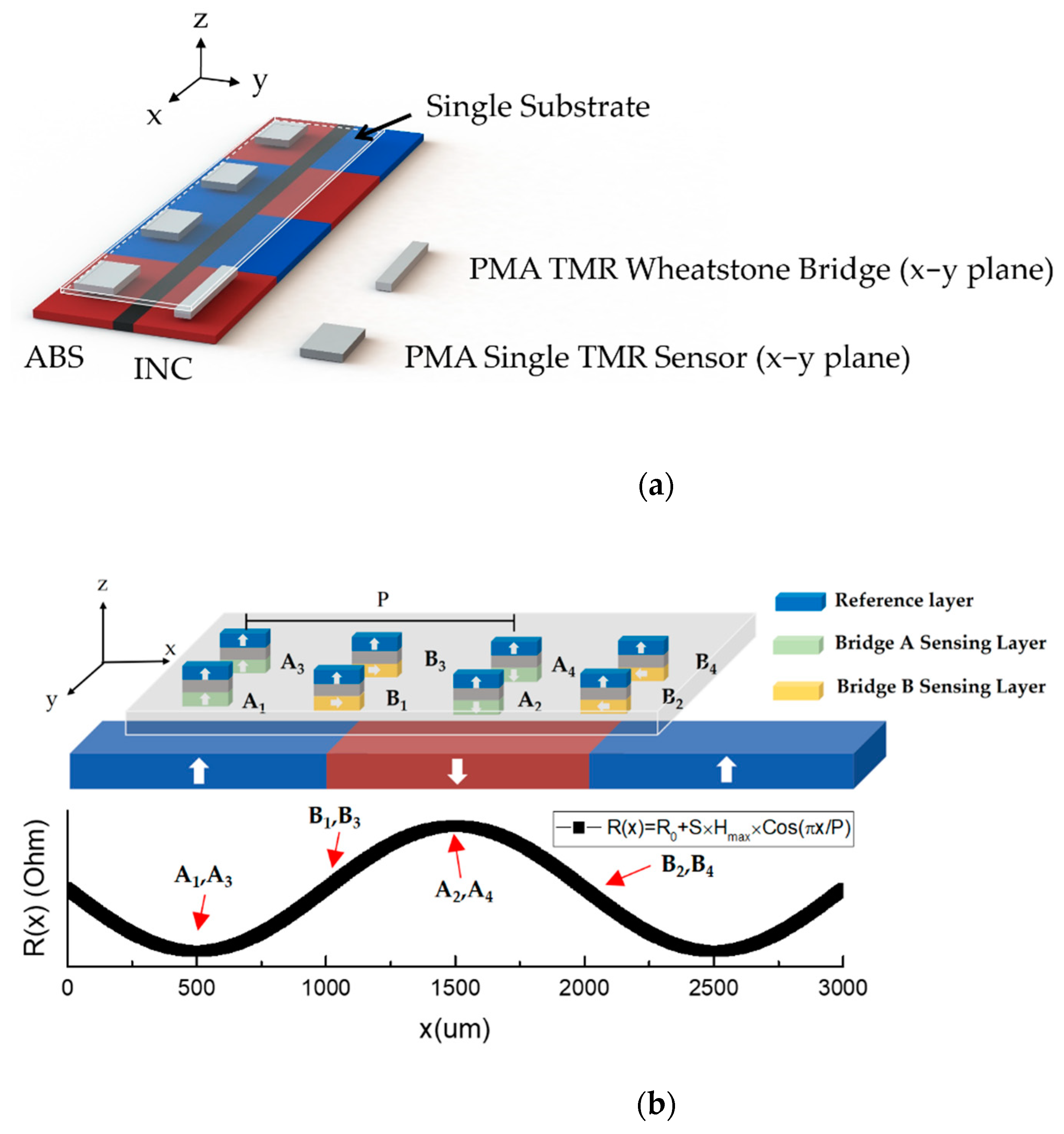
To solve the misalignment issues among sensors, and to reach both of the output requirements for ABS and INC simultaneously, we propose to use the TMR sensors, composed of magnetic tunneling junctions (MTJs), for both ABS and INC lines, in which MTJs are composed of a reference layer (RL) with perpendicular magnetic anisotropy (PMA) and a sensing layer (SL) with the magnetization along the in-plane direction. The TMR sensors consisting of MTJs have been used for INC lines [
10]. However, these MTJs possess the magnetization of RL and SL, both along the in-plane direction, which cannot be used for the ABS and INC detection simultaneously, as discussed in the next section. Therefore, in the existing design, TMR sensors are used for INC lines only, and extra Hall sensors are needed for ABS lines. In our design, we use the identical film stack for all sensors, so the same layer structure can be deposited on a single substrate, and the multiple sensors for both ABS and INC lines can be patterned and etched in an identical manufacturing process on the same substrate. Consequently, the cost is expected to be lower. Most importantly, the relative positions of the sensors are well-defined at the lithography stage; therefore, the feasibility of an alignment-free sensor module with easy installation is demonstrated.
4. Results and Discussion
In our proposed magnetic scale-based positioning system, several factors need to be carefully considered according to the field profiles of the scale.
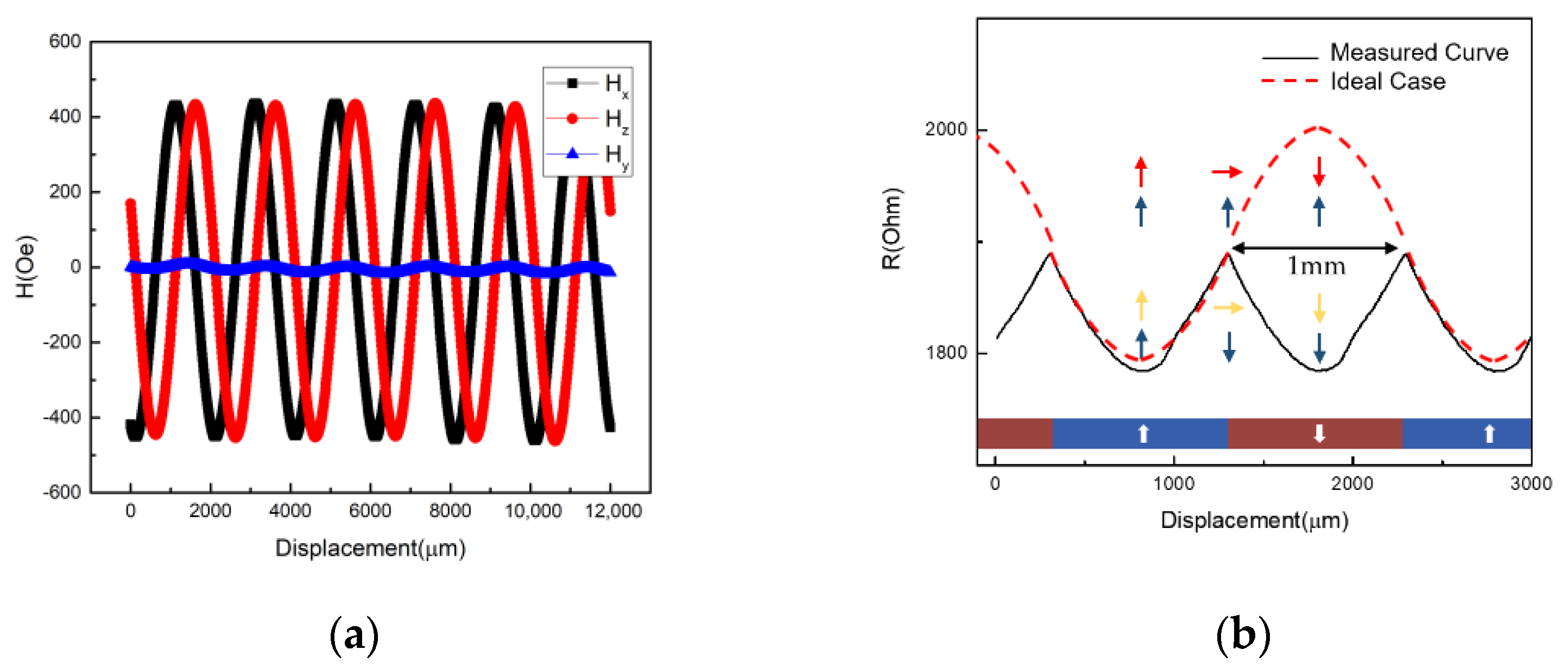
Figure 4a shows the field profile of the INC line, with perpendicular magnetization measured by a 3-axis Hall sensor with air gap = 0.1 mm. Both H
x and H
z exhibit sinusoidal behavior with identical magnitude and a 90° phase difference. The H
y is quite small compared with H
x and H
z. To achieve a high-performance positioning sensor, the following magnetic properties need to be well-controlled. First of all, the coercivity (H
c) of the RL needs to be larger than H
z,max, which prevents the RL from switching during the measurement. It is worth mentioning that, even if the H
c of RL is larger than H
z,max, with the assistance of the H
x, the RL may still be switched based on the Stoner–Wohlfarth astroid [
20]. Either the low H
c or H
k would make the RL switched, which leads to an undesirable output signal. Here we show one example in
Figure 4b, in which the RL is only composed of Pt/Co multilayer without the SAF structure, so that the H
c of RL is reduced to only 500 Oe and H
k = 2 k Oe.
Figure 4b shows the measurement results with pole pitch equal to 1 mm for the INC scale. Since our sensor possesses cross-anisotropy, if the magnetization of RL is firmly pinned, the linear RH response should lead to the periodicity of the output signal equal to 2P, as shown in
Figure 3b (also shown in
Figure 4b as the red dash line). The arrows in
Figure 4b show the magnetization directions of the pinned and sensing layer for the sensors with strong PMA (ideal case) and weak PMA (H
k = 2 k Oe, measured curve), respectively. The magnetization of the sensing layers rotates identically in both cases; however, when the perpendicular anisotropy of RL is not strong enough, the magnetization of RL is switched with the assistance of H
x during the measurement, resulting in sign change of dR/dx and a triangle-like sharp peak with a wrong periodicity (~1 mm). Therefore, the strong PMA is essential to suppress the RL tilting caused by the presence of H
x.
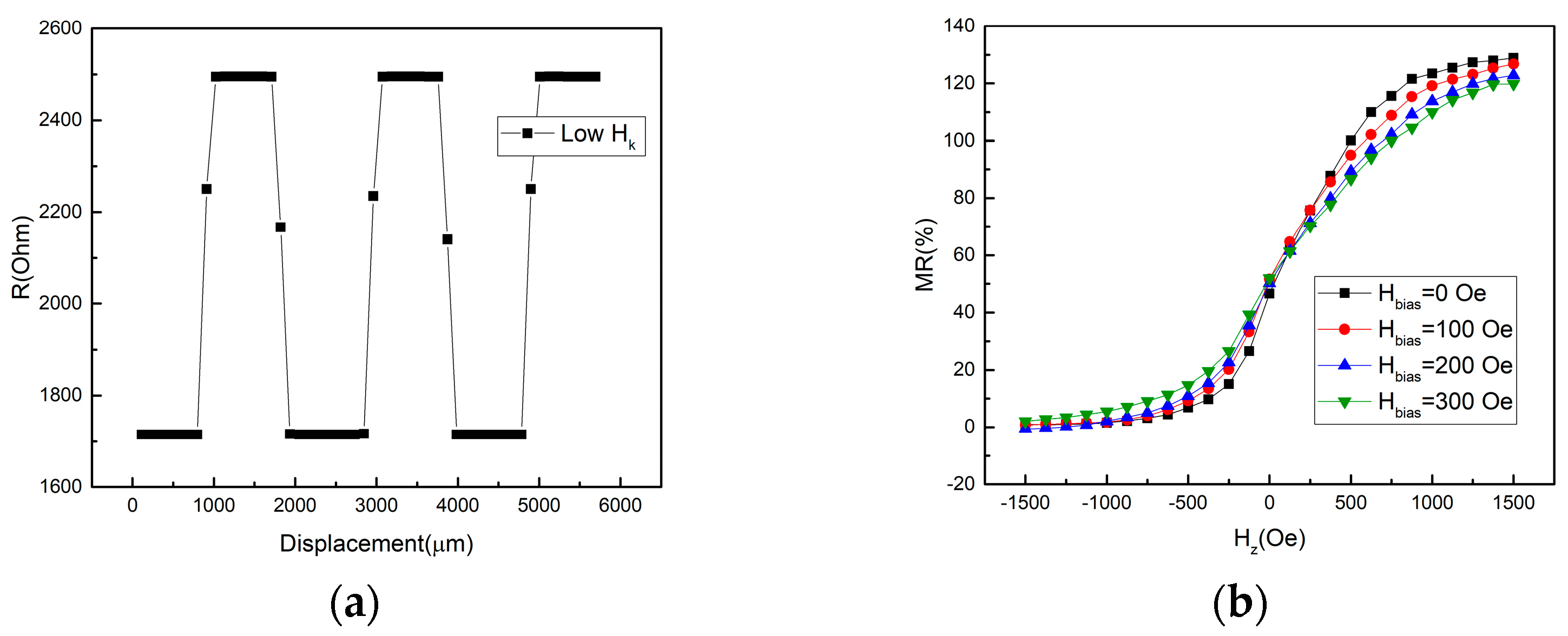
The control of the anisotropy field (H
k) of the SL is also critical. If the SL exhibits a large in-plane anisotropy, a strong z-field is needed to drive the magnetization of SL to be tilted away from the x–y plane, resulting in a low sensitivity. If the anisotropy of SL is too small or even exhibits PMA, the SL will be saturated easily during the position sensing, leading to a square-like output instead of a sinusoidal output, as shown in
Figure 5a. Although the disturbance of H
x on RL can be suppressed by utilizing magnetic layers with strong PMA, the disturbance of H
x also exerts on the SL. Due to the H
x presence, it behaves as the stabilizing field for SL magnetization aligned in the x–y plane; therefore, the tilting of SL magnetization away from the x–y plane depends on the magnitude of H
x field. Since H
x varies with position, the saturation field of SL along the z direction and sensitivity (S) change accordingly.
Figure 5b shows the out-of-plane RH curves with different magnitudes of in-plane bias fields. Ideally, according to Equation (5), the sensitivity (S) is a constant. However, the position-dependent x field, behaving as the bias field, may result in the variations of sensitivity [
21]. As a result, the sensitivity changes as the sensor moves, which leads to a nonlinear transfer curve with respect to out-of-plane field, which may not precisely reflect the sinusoidal field profile of the scale. In fact, the sensitivity affected by the presence of the orthogonal field to the sensing direction, so-called the cross-field effect, is also observed in other types of MR sensors [
22,
23]. Its effects on the position accuracy will be discussed later.
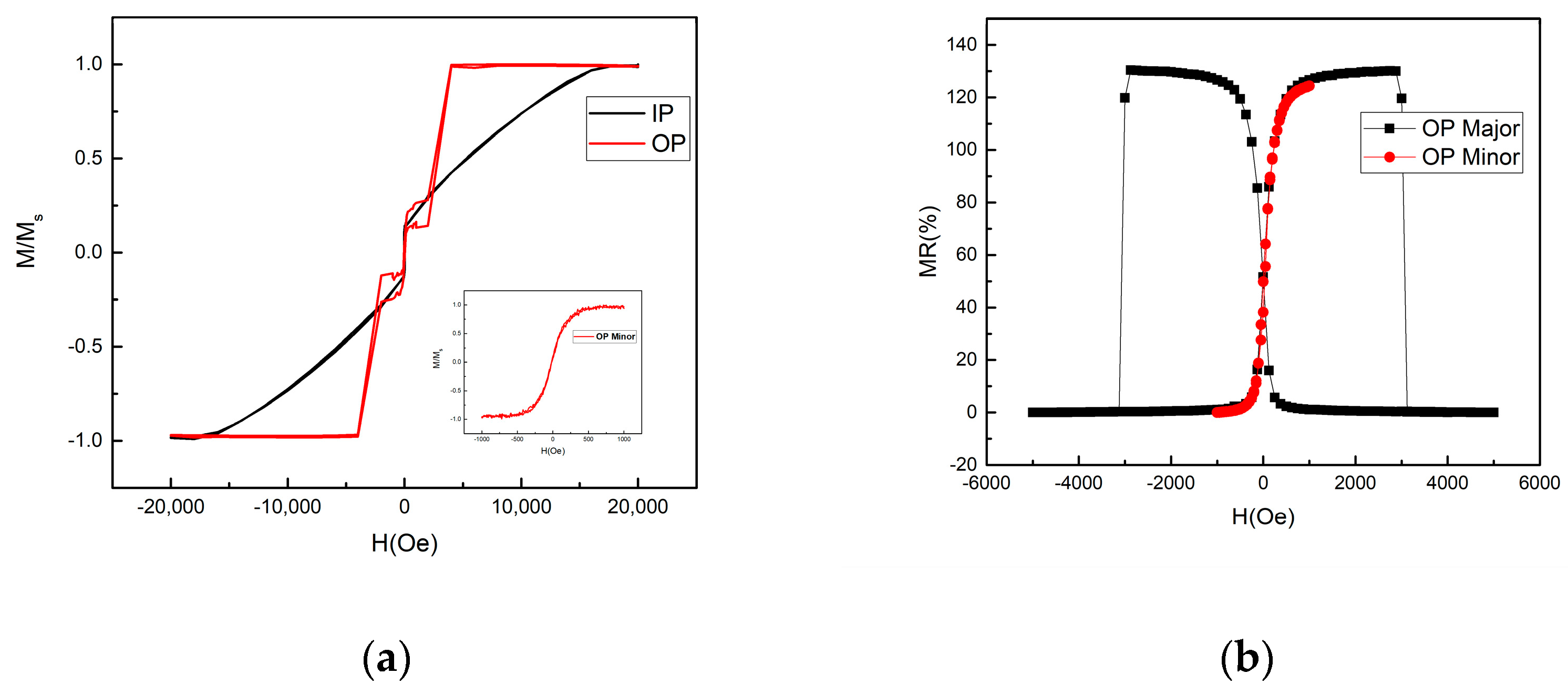
The magnetic property of the full structure MTJ after annealing at 350 °C is shown in
Figure 6a. The SAF pinning layer significantly enhances the coercivity of the reference layer, and the pinning field of the SAF is around 2500 Oe. The in-plane curve shows that the H
k of the CoPt–SAF pinned layer is around 20 kOe, indicating that the SAF structure indeed provides strong PMA. As a result, a robust RL is obtained. The minor loop shown in the inset of
Figure 6a reveals a linear response, indicating that the sensing layer rotates coherently with the field applied along the out-of-plane direction. The optimized thickness of the CoFeB sensing layer is 1.6 nm. At t = 1.6 nm, the H
k of the SL is round 250 Oe.
Figure 6b shows the RH transfer curves with an out-of-plane applied field for the single MTJ device. The MR is 130% and the reference layer magnetization is fixed within the dynamic range of the sensing layer, resulting in a high effective MR response. The minor loop of the RH curve shows the desired linearity and low hysteresis. The transfer curve of the sensing layer is symmetric to the zero field, indicating that the stray field from the reference layer is significantly suppressed as a result of the compensated magnetizations in SAF [
24]. The H
k of the SL is slightly increased to 500 Oe during the etching process.
After checking the magnetic and electrical properties of the single device, we patterned the single MTJ for the ABS line and the Wheatstone bridge for the INC line. For the ABS line, since it only needs to detect the polarity, there is no need to form a bridge configuration. In contrast, Wheatstone bridges are required in the INC line since the resistance fluctuates with the ambient temperature, resulting in a fluctuating signal and influencing the position accuracy.
The scale measurement is performed with the sensors placed in the x–y plane above the integrated scale shown in
Figure 1b. The applied voltage for the MTJ sensors is 1V.
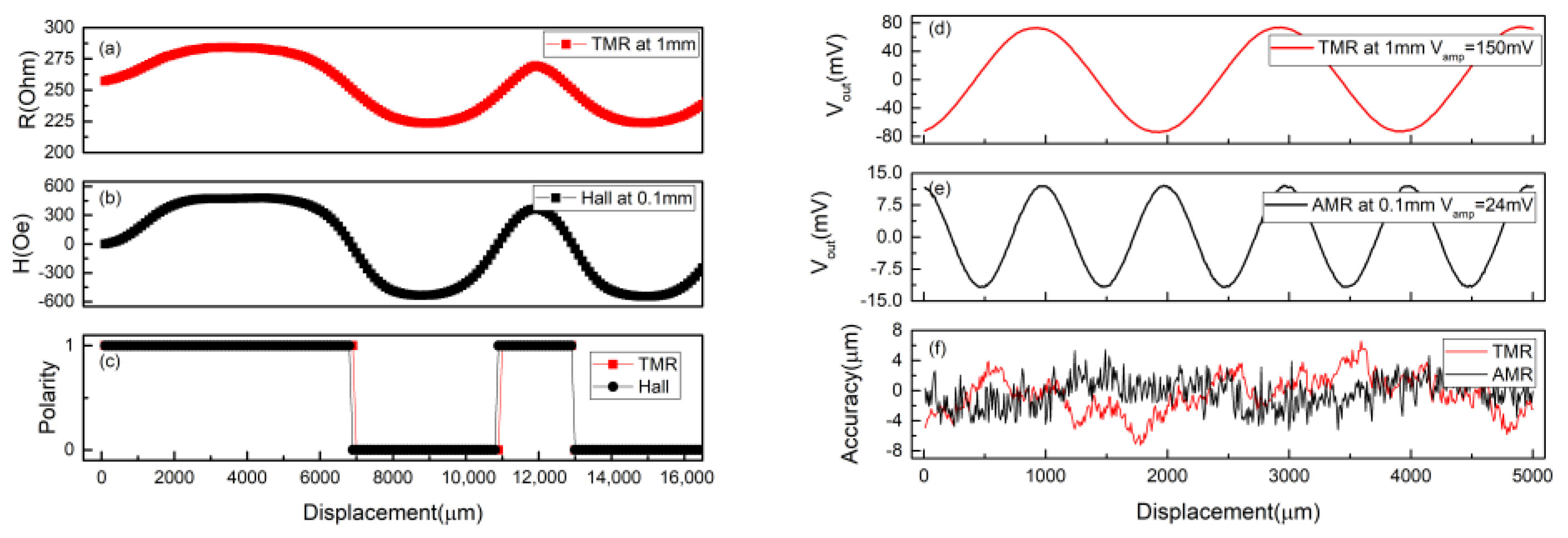
Figure 7a shows MTJ output for the ABS line at air gap = 1 mm. The output signal shows clear high and low resistance states corresponding to the N and S poles, respectively. To further evaluate the ABS sensor performance, the commercial Hall sensor is also used to measure the same range but with air gap = 0.1 mm, as shown in
Figure 7b. The measured profile of our sensor highly matches the Hall sensor.
Figure 7c shows the corresponding polarity. The digital signal is converted from the measured analog signals. The results show that the TMR sensor does match the Halls sensor, capable for the ABS sensing, but with a higher gap tolerance.
Figure 7d show the INC measurements of one of the TMR Wheatstone bridges with sensor at gap = 1.0 mm. The bridge exhibits a sinusoidal output with high sensitivity. To make a comparison, we also benchmarked the commercial INC sensor based on AMR effect (
Figure 7e). The applied voltage for the AMR sensor is 1V. Obviously, our TMR sensor provides a six times higher signal at gap = 1.0 mm compared with the AMR sensor at 0.1 mm. We also simulated the accuracy of the INC sensor based on the dual bridge output to evaluate the performance of the sensor. The ideal position sensors reveal quadrature sinusoidal output signals while passing across the scale. From the viewpoint of positioning, the output signals of the INC sensor can be transferred by interpolation technique into position. The error between ideal and measured position is known as accuracy. The accuracy simulation is obtained as follows. First of all, the ideal sinusoidal fitting curves (V
A.ideal and V
B.ideal) are obtained from the signals measured by the dual bridge (V
A.measured and V
B.measured). By comparing the difference between arctan (V
A.ideal/V
B.ideal) and arctan (V
A.measured/V
B.measured), we can obtain the deviation from the ideal position [
25]. The results of simulated accuracy are shown in
Figure 7f. The accuracy error of TMR sensor at gap = 1 mm is within the range of ±6.5 μm, which is comparable to the AMR sensor at 0.1 mm. Although the accuracy needs to be further improved, the working distance can be much higher in our TMR sensor. The high working distance not only simplified the installation, but provided the tolerance of the vibration and impurity in the factory. The results prove that both ABS and INC lines can be detected by using the identical layer stack with sensing planes parallel to the scale plane, which makes all the sensors able to be fabricated on a single substrate. In our proposed scheme, the sensor position is well-defined and the alignment error between sensors in the integrated system is totally excluded.
Finally, we would like to discuss the possible solution for further improving the accuracy of our proposed system compared with the AMR sensor for the INC line. As illustrated previously in
Figure 5b, the varied H
x biasing field keeps changing the sensitivity of the sensing layer, resulting in an imperfect linear transfer curve, which lowers the accuracy. In our setup, only the x-direction bias field needs to be considered, and the H
y from the scale can be neglected according to
Figure 4a. Therefore, to suppress the changed tilting caused by a varying H
x bias field with the position, we may provide an additional stabilizing field along the y direction to stabilize the SL magnetization on the x–y plane. Methods such as shape anisotropy or exchange bias along the y-axis can be expected to further improve the accuracy of the INC line.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






