
A Quantitative Model for Optical Coherence Tomography
by
 , , , and
, , , and
Leopold Veselka
1,† ,
,
Lisa Krainz
2,†,
Leonidas Mindrinos
1,
Wolfgang Drexler
2,* and
Peter Elbau
1 1
Faculty of Mathematics, University of Vienna, 1090 Vienna, Austria
2
Center for Medical Physics and Biomedical Engineering, Medical University of Vienna, 1090 Vienna, Austria
*
Author to whom correspondence should be addressed.
†
These authors contributed equally to this work.
Sensors 2021, 21(20), 6864; https://0-doi-org.brum.beds.ac.uk/10.3390/s21206864
Submission received: 14 September 2021
/
Revised: 11 October 2021
/
Accepted: 12 October 2021
/
Published: 15 October 2021
(This article belongs to the Special Issue Optical Coherence Tomography: Technology and Algorithms)
Abstract
:Optical coherence tomography (OCT) is a widely used imaging technique in the micrometer regime, which gained accelerating interest in medical imaging in the last twenty years. In up-to-date OCT literature, certain simplifying assumptions are made for the reconstructions, but for many applications, a more realistic description of the OCT imaging process is of interest. In mathematical models, for example, the incident angle of light onto the sample is usually neglected or a plane wave description for the light–sample interaction in OCT is used, which ignores almost completely the occurring effects within an OCT measurement process. In this article, we make a first step to a quantitative model by considering the measured intensity as a combination of back-scattered Gaussian beams affected by the system. In contrast to the standard plane wave simplification, the presented model includes system relevant parameters, such as the position of the focus and the spot size of the incident laser beam, which allow a precise prediction of the OCT data. The accuracy of the proposed model—after calibration of all necessary system parameters—is illustrated by simulations and validated by a comparison with experimental data obtained from a 1300 swept-source OCT system.
1. Introduction
Optical coherence tomography (OCT) has proved to be a non-invasive, high-precision imaging technique with micrometer resolution. It emerged around 1990 for in vivo imaging of the human eye [1,2] and gained increasing interest ever since [3]. Today, extensions, such as angiography [4], polarization sensitive OCT [5] and optical coherence elastography [6], unlocked a wide range of possible applications; for example, blood vessel analysis [7] and cancer margin detection [8], while OCT endoscopes [9] are clearing the way for high-resolution imaging of internal organs and their pathologies. Multi-modal imaging techniques [10] often use OCT as morphological guidance.
While many theoretical OCT articles assume a sample geometry that is perfectly perpendicular to the OCT beam [11,12,13], commonly used OCT systems are designed for rough sample surfaces and arbitrary sample inclinations, which yield much less power at the detector. Normal incidence not only oversaturates the detector easily, especially for samples with a high refractive index and a very directed scattering profile, but can also lead to interference between the sample and optical parts inside the setup, e.g., the scan lens. To prevent imaging artifacts, normal incident is therefore usually avoided in OCT.
In addition, most works are based on a plane wave ansatz for describing the sample and reference fields [14,15,16,17]. While this approximation is valid for the immediate focus region, it is most often not true for the whole field of view of the setup or even the whole sample area. Common effects such as a focus-dependent intensity profile inside the sample cannot be described with a plane wave ansatz. While workarounds such as multiplying the spectral resolution with a sensitivity factor have been proposed [18], in this work, a Gaussian beam, similar to [19], is used as incoming wave for a more precise description of the light beams. Besides analytical models for simulations of an OCT signal, there exist also Monte Carlo methods [20,21,22], recent ones also modeling the light as Gaussian beams [23].
To make a quantitative reconstruction of the optical parameters of the sample possible, we make the simplifying assumption that the sample is not absorbing and can at least locally be described as a layered medium (with layers not necessarily perfectly perpendicular to the incident light), which is a classical assumption in this field. This simplification allows us to analytically calculate the scattered light from the sample, which is then collected by a scan lens and combined with the reference light to produce the interference pattern. We roughly model the effect of the scan lens on the scattered light by discarding plane wave components moving in wrong directions. Together with the layers and the focusing effects introduced by Gaussian beams, we derived simulations which have been in much better accordance with the experimental data obtained by a 1300 swept-source OCT system compared to a simple plane wave approach.
The paper is structured as follows: in Section 2, we describe the OCT imaging system that was built for this work. The individual experiments performed for investigating the different effects of the system on the data are also introduced. In Section 3, we present the general problem and the governing equations. We give the forms of the sample and reference fields using the near- and far-field representation of back-scattered Gaussian waves. The section ends with the derivation of the formula for the measurement data. In Section 4, we present in two experiments the dependence of the data on the incident angle and the beam focusing and show how to use them as calibration tools to determine otherwise unknown parameters such as the beam radius in the focus. The comparison between experimental and simulated data is presented in the last section. There, we see that our model nicely predicts the behavior of the experimental data with respect to different orientations and positions of the sample relative to the focus. The proofs to all theoretical results presented in this article can be found in the Appendix A.
2. Experiments
Since there are many different variants of OCT systems around, we briefly describe the system we use for generating the data and the individual experiments.
2.1. OCT Setup and Post-Processing
All measurements where performed with a custom-built fiber-based OCT system with a central frequency of about 1300 and 30 bandwidth. It is built upon an akinetic swept-source from Insight Photonic Solutions, USA, which emits 60 with a maximum repetition rate of 500 . This laser was selected for its high phase stability and flat power profile over its whole bandwidth. This makes it well-suited for any type of signal analysis.
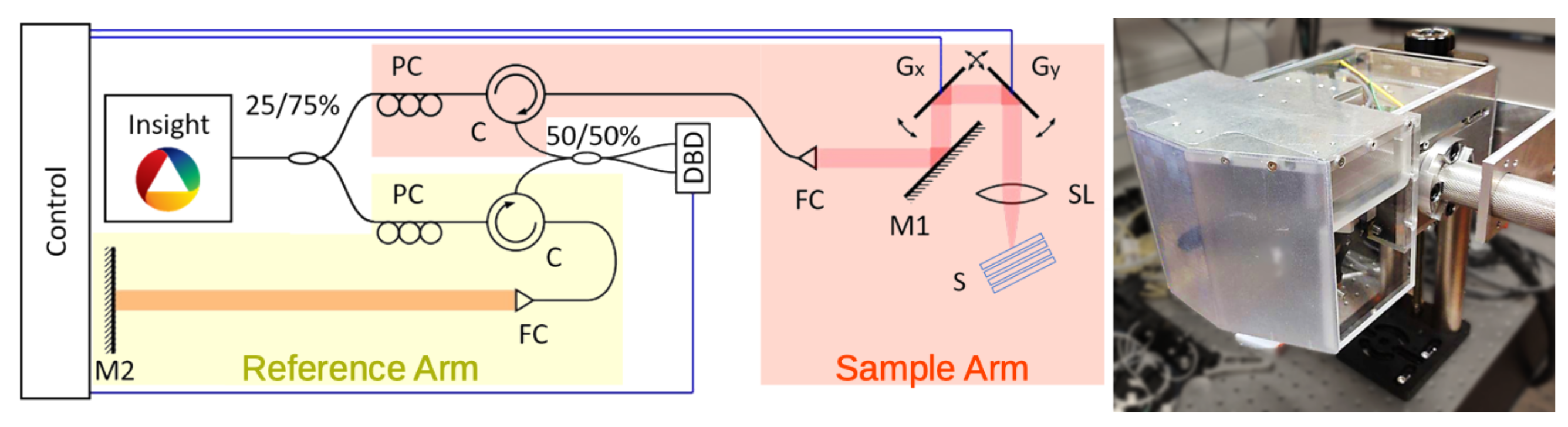
As shown in Figure 1, the light is split into reference (25%) and sample arm (75%) by a fiber coupler and is released into free-space by 4 fiber collimators. The sample arm (red) features a rotatable imaging probe with conjugated scanning and an LSM54-1310 scan lens (Thorlabs, Newton, NJ, USA) for a flat imaging plane. In the reference arm (yellow), the light is reflected by a mobile mirror. Circulators guide the reference and sample arm signal to a 50/50% fiber coupler for recombination. A dual-balance-detector (BPD-1, Insight Photonic Solutions, Lafayette, LA, USA), short DBD, records the cross-correlation term and an ATS9360 data acquisition card from Alazar Technologies, Canada, is used to digitize it. To prevent the saturation of the detector, an adjustable neutral density filter is used in the reference arm. The system achieves an axial resolution of 31 and a lateral resolution of 24 in air as well as a SNR of 105 dB. To ensure satisfactory oversampling, a lateral pixelsize of in air is selected.
The source supplies a trigger signal used to coordinate the galvanometer movement and data acquisition. The OCT control software written in Labview and data processing is performed in MATLAB. The recorded spectrum consisting of 700 datapoints is already spaced equally in terms of wavenumber and thus can immediately be Fourier-transformed into image space. The small bandwidth of the laser makes dispersion compensation unnecessary. Zeropadding ensures the small axial pixelsize of in air. Background removal is performed via subtraction of the average spectrum of a volume. The DBD records only the difference between both input signals, thereby removing common-mode noise and centering the signal around zero. Through the digitalization process, the signal is shifted in height, so it can be stored as unsigned integer. This shift is removed again during post-processing through the background subtraction.
2.2. Power vs. Angle
To investigate the influence of the incident angle between sample surface and OCT beam, one of the fibers entering the DBD was connected to an optical power meter (PM100C with S122C, Thorlabs, Newton, NJ, USA) instead. A mirror was fixed onto a goniometer stage with a Vernier scale (GOH-65A100RUU, OptoSigma, Santa Ana, CA, USA) with a kinematic mount. First, the goniometer was aligned to ensure that the OCT beam goes through its Pivot point. Second, the kinematic mount and a vertical stage were adjusted to put the mirror in focus and ensure normal incident of the laser beam on the mirror, using the power meter as guidance. Then, the mirror was tilted in 5 arc minute steps back and forth between and 1° and the power was recorded until each angular position was measured 6 times.
2.3. Power vs. Focus
For quantification of the Gaussian behavior of the focus, a motorized stage (T-LSM050A, Zaber Technologies, Vancouver, BC, Canada) was used to transport once a mirror and once a microscopy coverglass through the focus of the OCT system, with a roughly fixed tilt of about . The coverglass (631-0124, VWR International, Radnor, PA, USA) has a refractive index of for 1300 , which needs to be taken into account during data analysis. At each position of the stage, we use 11 steps for the mirror and 7 for the coverglass, a 3D OCT volume was recorded. These 3D volumes were post-processed according to Section 2.1 and used to determine the exact incident angle and the distance of the center of the sample surface to the position where sample and reference arm would have the same length, called zero delay.
3. Mathematical Model
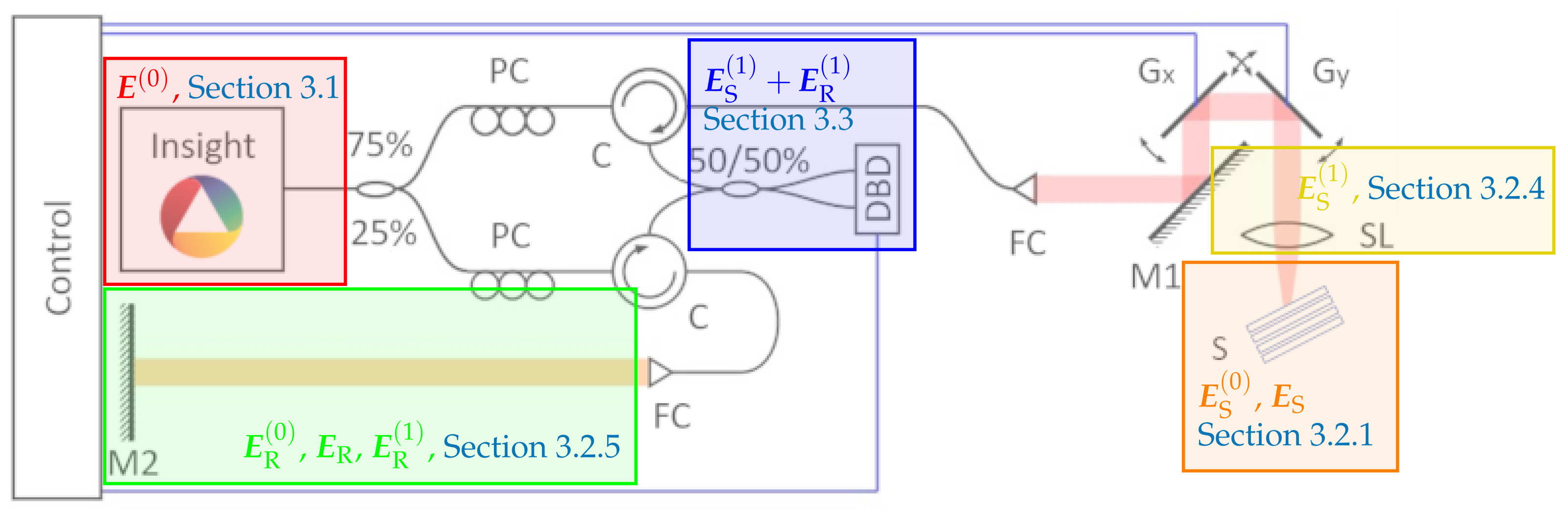
Considering the workflow of the used OCT system described in the previous section, we model the parts shown in Figure 2 separately.
Firstly, in Section 3.1, we model the produced laser illumination. The laser light is split into two beams, one is sent to the sample and the other to the mirror in the reference arm. We model their scattering process in Section 3.2.1 and Section 3.2.5, respectively.
The reflected light in the sample arm is (partially) collected by a scan lens and coupled into a fiber. This aspect is the topic of Section 3.2.4.
After recombination of the scattered light beams, we model the detection via a dual-balancing detector of this superposition in Section 3.3. This in particular is discussed for the measurement related to two experiments explained in Section 2, which, in the end, are obligatory for the calibration of necessary parameters in the forward simulations.
3.1. Gaussian Beam Illumination
The shape of the light produced inside an optical resonator (we ignore at this point the finite size of the resonator and the boundary conditions) of a laser can according to [24], for example, be well described by a Gaussian beam.
We consider a Gaussian beam as a monochromatic solution of the electromagnetic wave equation in vacuum which reduces it to Helmholtz equation (usually it is considered as solution of the paraxial approximation of the wave equation which is not necessary here):
It is characterized by its form
in the focal plane for a function such that its 2D Fourier transform is compactly supported in (the open ball with center 0 and radius ) and a polarization vector
Theorem 1.
Let be a function such that its two-dimensional Fourier transform is compactly supported in and let . Then, for every a solution of the Helmholtz problem (1) is given by
with
Such a wave describes well the light inside the optical resonator of the laser. Then, through one partly transparent mirror of the resonator, we obtain only the light moving in the negative -direction of the form
with Hereby, a reasonable model for the shape of the function f is one which resembles a Gaussian function.
This laser light enters the single-mode fiber-based system. The good approximability of the laser light after exiting the single-mode fiber by a Gaussian beam shape allows us to assume that the Gaussian behavior is conserved throughout the system.
3.2. Backscattered Gaussian Fields
The laser light is split into two waves, for the sample and for the reference arm, as in Equation (5), respectively, by a beam splitter and both remain in the form of a Gaussian beam, with possibly different beam parameters, for example, due an optical attenuation wheel inside the reference arm which causes a difference in light intensities between the beams.
3.2.1. The Sample Field
The beam is now directed onto the sample and we say it is of form (5) with Then, if the beam is sufficiently focused, meaning that the values of can be neglected outside a small region, we only need to consider for the scattering process the shape of the sample inside this region. In this subregion, we denote it by , we assume, using the tangent plane approximation, that it can be described by a layered structure. These layers are not necessarily perpendicular to incident beam, but for simplification assumed to be parallel to each other. This is modeled by being a finite union of layers:
for some unit normal vector Each of these shall be characterized by a constant refractive index
Under these conditions, we model the backscattered field as solution of the Helmholtz equation
where and appropriate radiation conditions are assumed.
The incident field (5) is represented as a superposition of plane waves having different wave vectors. Because of the linearity of the equation it is sufficient to solve the problem for every plane wave. The result for these backscattered fields for such a sample is well known in this plane wave case, see [25,26]. For the simplest case we consider an (arbitrary) plane wave as incident illumination from the top,
with amplitude function and propagation vector
which we consider implicitly as a function of and We obtain the reflected electric field
where denotes an arbitrary point of the top boundary (that is ) of the object,
the wave vector and the sum of the reflection coefficients of the differently polarized parts
Here, we have decomposed into its transverse electric and magnetic polarizations, with coefficients and respectively. Further, we use Snell’s law for the determination of the transmission angle
Summarizing the scattered (plane) waves for all and
then finally results in
with given by Equation (10).
3.2.2. Far Field Method
Since the distance between the scan lens and the sample (which is roughly 6 ) is much greater than the size of of the sample itself (which is only a few millimeters), we can be tempted to simplify the integrand by using the far-field approximation.
Mathematically, this means, that we are approximating Equation (11) by its behavior at some point as
To compute the dominating term , we apply the method of stationary phase, see Lemma A1, which is based on the approximation of the phase function with
by its Taylor series around its critical points.
3.2.3. Comparing the Near- and the Far-Fields
Comparing the representations (11) and (12) of the scattered electric field simulations, it becomes obvious that there is a difference in the visible effects provided by these methods. In this work, we are concerned with the influence of the focus in the scattered field.
In contrast to the far-field representation, the scattered field in the near field regime is heavily depending on the distance between the positions of the layer and of the focus. We neglect the vectorial quantities in Equation (11) for a moment and allow for an amplitude function
where the parameter is such that the error is negligible. Hereby, is a disk with small radius and center Then, for a single surface (medium), we obtain the scattered field
We assume that on the small disk, the reflection coefficient is approximately constant and due to small deviations of from zero, we may approximate the root in the exponents
Further, for the sake of simplification, we restrict fix the positions of the focus and the object below the origin and evaluate at This finally gives for the scattered field
where we defined the phase elements by
Since we evaluate both integrals in Equation (16) and arrive at
After complex conjugation in the exponent and taking the absolute value of the field, we find that
with distance Considering now Equation(18) for different positions of the sample, and therefore for varying corresponds to different evaluation points with in the far-field regime. Taking the absolute value of Equation (12)
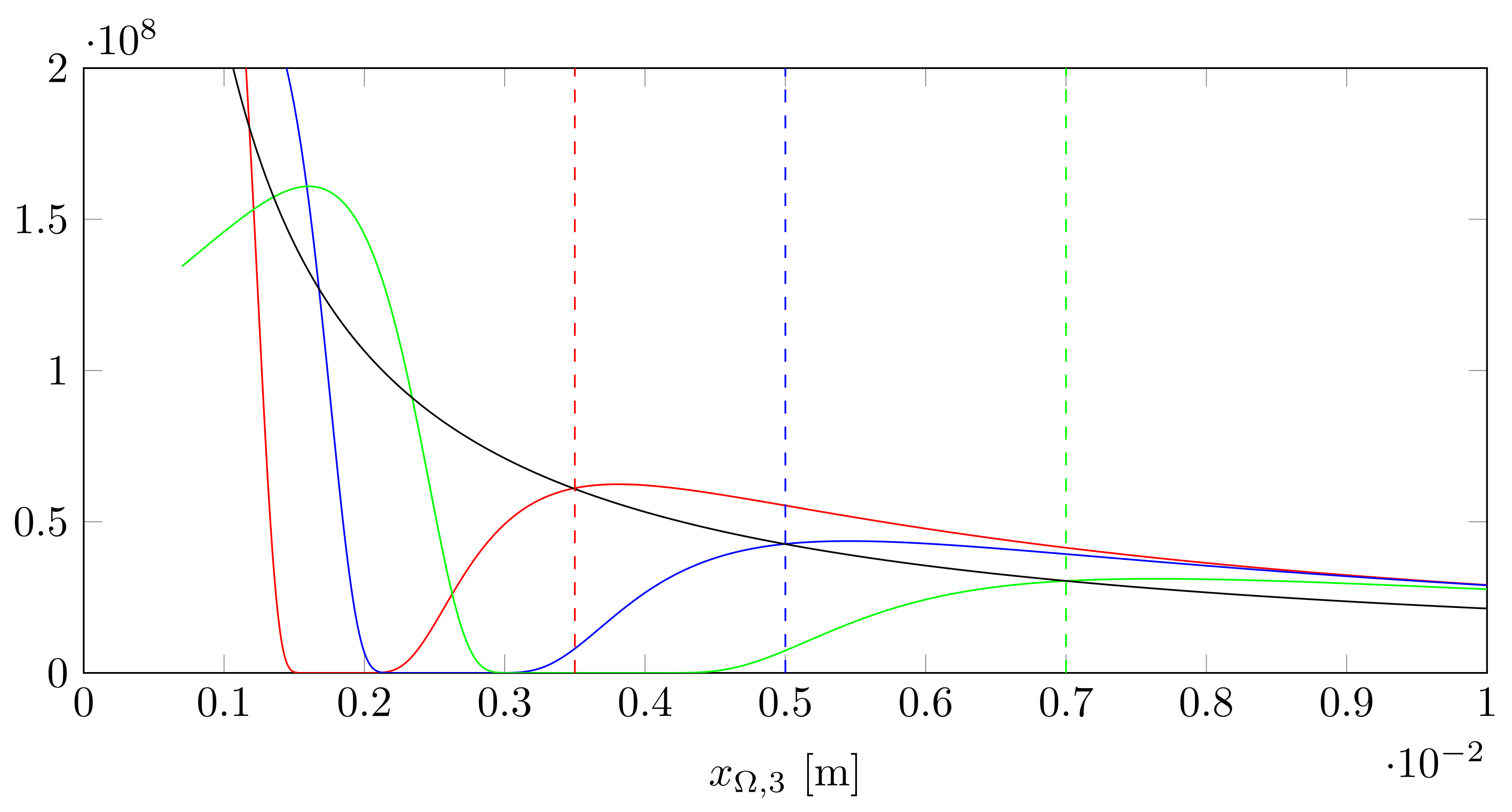
we observe that opposed to the near-field representation, the far-field regime is independent of the focus position. Figure 3 provides a comparison between both for different positions of the focus and the surface.
Since the far-field approximation does not show the dependence of the electric field on the focus, we stick with the more complicated near-field representation of the scattered light in Equation (11).
3.2.4. The Scan Lens
The backreflected light then passes trough the scan lens and is collected by a fiber collimator. Thereby, we loose all plane wave components whose propagation directions are outside a certain angular range of the collimator. We model this by reducing the area of integration in Equation (11) to a set of those scattered wave directions which have an angle to the measurement direction less than a certain angle of acceptance that is
which finally gives a (scattered) sample field
at the scan lens position above the sample.
3.2.5. The Reference Field
Similarly, we model the reference field as solution to the scattering problem (6) with Gaussian incident illumination and a medium with constant (infinitely) large refractive index. Following the same line that led to Equation (11), we obtain with a field of the form
Following the experimental setup, the mirror in the reference arm is perpendicular to the incident light, so that the unit normal vector and positioned in the focus of the , such that, following Section 3.2.3, the far-field approximation for reference field is valid. We thus have a reference field given by
3.3. OCT Measurements
With the identities of the incident and the backscattered light in hand, we now proceed with the modeling of the detection process inside an OCT system.
In order to suppress common-mode noise and enhance the signal-to-noise ratio, a dual-balance-detector is used to record the OCT signal. After recombination of sample and reference arm light, the laser signal is split 50/50% into two different fibers , each entering one of the DBDs optical inputs. The DBD then subtracts one input from the other, thereby removing everything but the cross-correlation term of the interference.
Thus, assuming that the sample and the reference fields and are passing through a perfect splitter, we obtain the forms for the fields in the fibers as
We assume, ignoring the travel paths inside the fibers, that these fields are detected at the position of the scan lens. These measurements are performed for different wavenumbers in a scan range We therefore indicate explicitly the dependence on in the measurements:
4. Calibration of the Model
So far, we have investigated both the modeling of the backscattered wave from a (layered) object under Gaussian laser illumination and the measurement process of the OCT system described in Section 2.1.
However, simulations based on this explicit model and the following comparison with experimental data presupposes the knowledge of a list of system parameters. Within this list, we distinguish between parameters with values known from specifications such as the wavenumber and parameters which we need to calibrate from the experiment, the beam radius of the Gaussian beam and the angle of acceptance, for example. In order to be capable of extracting these parameters for the simulations, we use two calibration experiments. On the one hand, we consider an experiment which shows the behavior of the backreflected laser power for different surface tilting angles and, on the other hand, we consider the influence of varying positions of the object, with respect to the focus, on the measured data.
4.1. Angular Dependence of the Measured Power
We use a mirror as a sample and analyze the influence of the surface angle on the measured intensity of the scattered electric field. Following the measurement process in Section 2.1 and Section 2.2, the reference arm is blocked, preventing any light from the reference arm to reach the detector. Furthermore, one of the two fibers, which would normally enter the DBD, is connected to a power meter. The measured data are therefore given as the intensity of the scattered field of this mirror. Hereby, again referring to the experimental setup in Section 2.2, we model the totally reflecting mirror as a sample characterized by an infinitely large refractive index. We parameterize the unit normal vector of the mirror surface by
for small values of
We describe the measurement process for this experiment in a way that the scattered light is detected by a single scan lens point, for simplification we say for a selected wavenumber in the spectrum This in the end, yields a measured intensity of the form
where is given by Equation (20) and accounts for the traveling through the beam splitters. Additionally, we say that the function is approximately given as in Equation (14) with where represents the radius of the Gaussian beam at the focus. Following the experimental setup, we fix the location (below the detector) of the focus and the mirror and assume that they are equal: We follow the notation from Section 3.2.3, but approximate this time the exact form of the domain of integration defined in Equation (19), which is an ellipse, by the rectangular domain
with the parameters
and assume that this characterization of still allows for an approximation of directions as in Equation (15). Then, using the definitions of for in Equation (17), we obtain the intensity of the scattered field as a function of and
where denotes the unnormalized sinc function given by and is the imaginary error function, defined by Thus, from measurements as in Equation (26), corresponding to the data provided by our power meter, for different values we can extract the beam radius at the focus and the angle of acceptance as solutions of the minimization problem
with the function G given by Equation (27).
4.2. Reconstructing Sample Information from an OCT Experiment
In the previous section, the beam radius at the focus and the angle of acceptance have been found. In order to complete the set of parameters necessary for the reconstruction from a measurement at a single point, we additionally need the normal vector of the tangential plane at each layer boundary.
In swept-source OCT, one in-depth profile of the sample, that is a measurement of the form of in Equation (22) (in this case centered at ), called an A-scan, is acquired during one wavenumber sweep of the laser. To get 3D information, raster scanning in and direction over a certain field of view is performed. The data used in the following are considered as a B-scan, a line of A-scans where only varies at a fixed position . Since we assume our layer boundaries to be planes with a certain normal vector the surface points fulfill an equation of the form If we can therefore determine at every raster position the third component this determines the normal direction
Since the single A-scans along those lines are performed independently, we treat these A-scan as single measurements. We shift the coordinate system always so that the incident beam is located at and therefore have We recall that the mirror in the reference arm is modeled as a medium described by an infinitely large refractive index with unit normal vector and fixed position at
For fixed mirror position , focus and detector , only varies with respect to different depth positions of the the sample. Thus, if we can determine the function from the measurements for different A-scans, we also obtain the depth information about the sample.
Under the simplifying assumption that the far-field approximation of the scattered sample field, using in Theorem 2, is a reasonable approximation in this case, we rewrite Equation (28) as
where the point is defined by Equation (13). Since depends linearly on , the measurements are then given as a harmonic oscillation with respect to and with frequency To solve for this frequency, we want to Fourier transform with respect to , which we define by
However, since we only have band-limited data, we will study the function
We will show in the following that is determined as the argument where the maximum is located, that is, . (The absolute value is used to avoid real- or imaginary parts with higher frequent oscillations in order to stably calculate a maximal point.)
We assume that and in Equation (29) are of exponential form as in Equation (14) and define the measurement function
with the parameters
By rewriting
and interchanging the integral and differentiation in the Fourier transform we find a form for the Fourier integral in Equation (30) as a convolution
for and To simplify this expression, we introduce the values
and observe from Table 1, that and are of the same order and is considerably larger compared to both of them, meaning that
for some which is close to one. Writing the functions under the integral (31) in terms of these values gives us with
the expression
Considering Equation (33), we will expand this around .
Lemma 1.
Thus, by applying Lemma 1 to Equation (35), we obtain after changing back to the original system of coordinates
resulting in
Note that the dominant sinc terms are centered symmetrically with respect to the origin. In order to derive an explicit expression for the maximum of Equation (37), we want to assume that is far away from the origin (which can be accomplished experimentally by tuning the position of the sample), then, these sinc functions do not influence each other strongly. We shift one of them to the origin by setting and obtain
Lemma 2.
Let F be defined by Equation (38). Then, for the function F attains a local maximum at
Shifting back to the original coordinates and using Lemma 2 yields that Equation (37) attains a maximum at that is which finally gives a representation of Equation (30) as
Thus, from the definition of we can uniquely determine
We use this information for the reconstruction of the surface angle For two different, but known lateral positions we consider A-scans leading to measurements of the form (28), for different depth positions for respectively. By using the above analysis (under the assumption that the far-field approximation is valid), we determine from the Fourier transform of these two the phase contribution in dependence of and Under the assumption that is considered small, the subtraction of these two then leads to
which gives the difference in depth Together with known lateral information and using that the unit normal vector on the surface satisfies we determine as
5. Results
Finally, we want to validate our model by comparing the simulations with experimental data. We focus on the two previously addressed experiments (see Section 4.1 and Section 4.2, respectively, Section 2.2 and Section 2.3). This quantitative approach shows the dependence of the data on the surface tilting and the focus position.
First we will use the calibration measurement to calculate the beam radius at the focus and the angle of acceptance, then, we look (using the just calibrated parameters) at the data from Section 2.3. The main parameters are presented in Table 1.
5.1. Power vs. Angle—Experiment
Following Section 4.1, we first calibrate the beam radius and the angle of acceptance from the experimental data for different values of the surface angle. This procedure is presented in Algorithm 1. The algorithm is based on the approximated form (27) shortening the computation time by evaluating a one-dimensional integral, instead of the two-dimensional integration presented in Equation (20). As discussed in Section 2.2, the sample arm power arriving at one of the DBD entrances was measured times at angular positions. While the laser power behaves very stable, due to the expected error from the rotational stage and the Gaussian dependence from the angle, some error is observed in the power vs. angle data. Thus, in the following, the data will be plotted with errorbars, representing the standard deviation.
| Algorithm 1: Extraction method for the beam radius and the angle of acceptance. |
| Result: and |
| Input: wavenumber with the central wavelength , , |
| for ; |
5.2. Power vs. Focus—Experiment
Using the calibrated spot size and angle of acceptance from the previous experiment, we compare the simulations with experimental data for multiple B-scans of a mirror and a coverglass as samples of interest.
Following Section 4.2, we first determine the surface angle and adapt the integration area in Equation (19). The coverglass, which is described by a medium with constant refractive index and perfectly parallel surfaces, has a thickness d, which is also determined from the experimental data, see Algorithm 2.
The experimental data are measured at a series of different wavelengths , equally spaced in wavenumber As described in Section 2.3, the sample was imaged at different positions along the depth axis.
We ignore polarization effects in the following and use the form (20) with for the simulations of the scattered field of the mirror data. However, for the coverglass experiment, we extend the form to a layer model with two parallel surfaces
where we have given the reflection coefficient
We assume again that can be well approximated by Equation (14) and define as in Equation (19).
| Algorithm 2: Extraction scheme for the tilting angle and the thickness d from the power vs. focus experiment. |
 |
Although the dual-balance detection already lowers the noise level in the data, we need to minimize the effects of the residual noise for a meaningful comparison with the simulations.
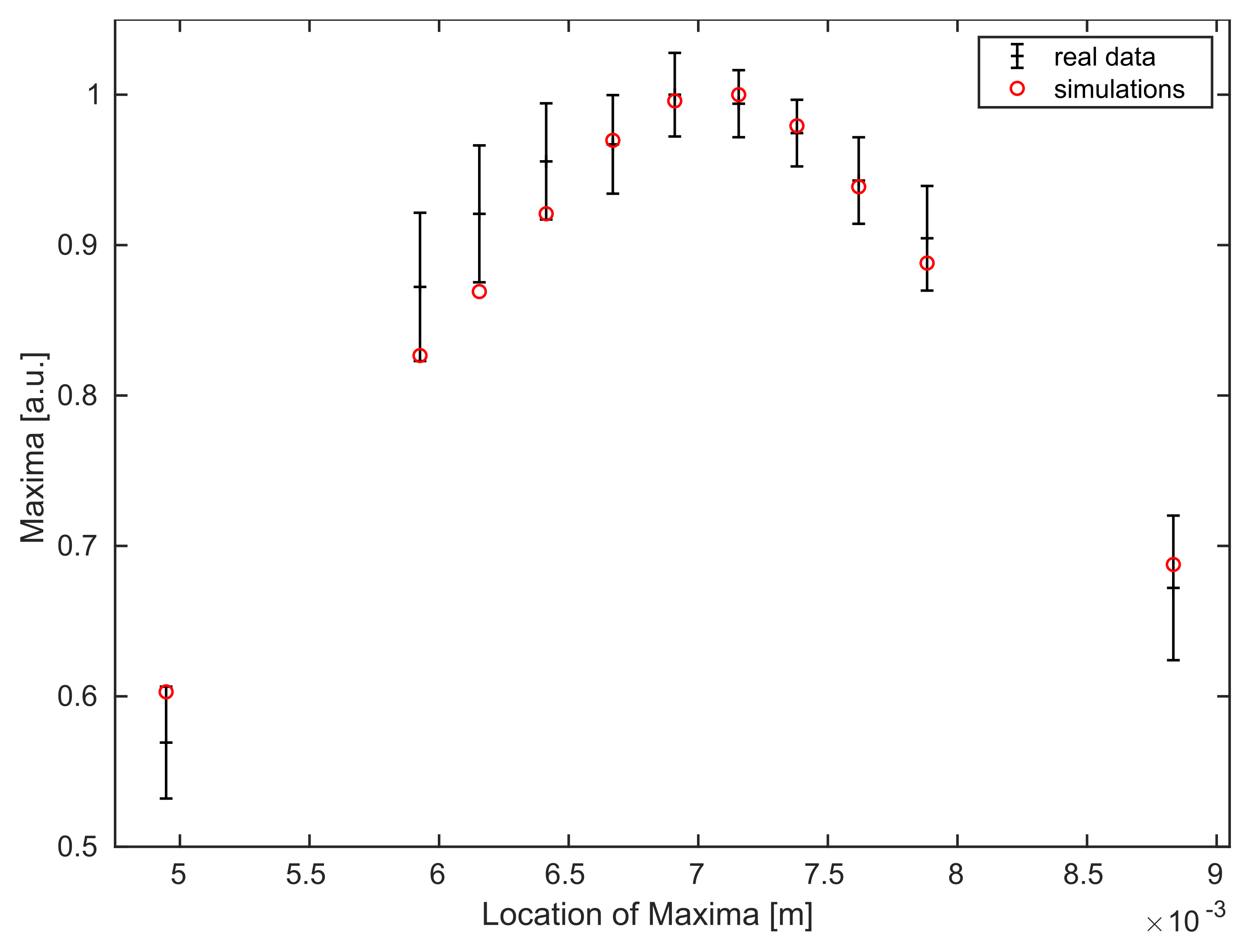
Thus, for every individual B-scan, we use the mean value of all maximum intensities of it’s A-scans, i.e., we consider the map where we use as defined in Equation (30), with accounting for the number of A-scans in every B-scan and for the different position (corresponding to this A-scan), as a reference for our simulations. The errorbars in Figure 5 represent the standard deviation of these variations over each B-scan. The highest value of the experimental data is matched to the highest value of the simulation for comparison.
Figure 5 shows, that the Gaussian behavior of the data for the mirror experiment follows the theory.
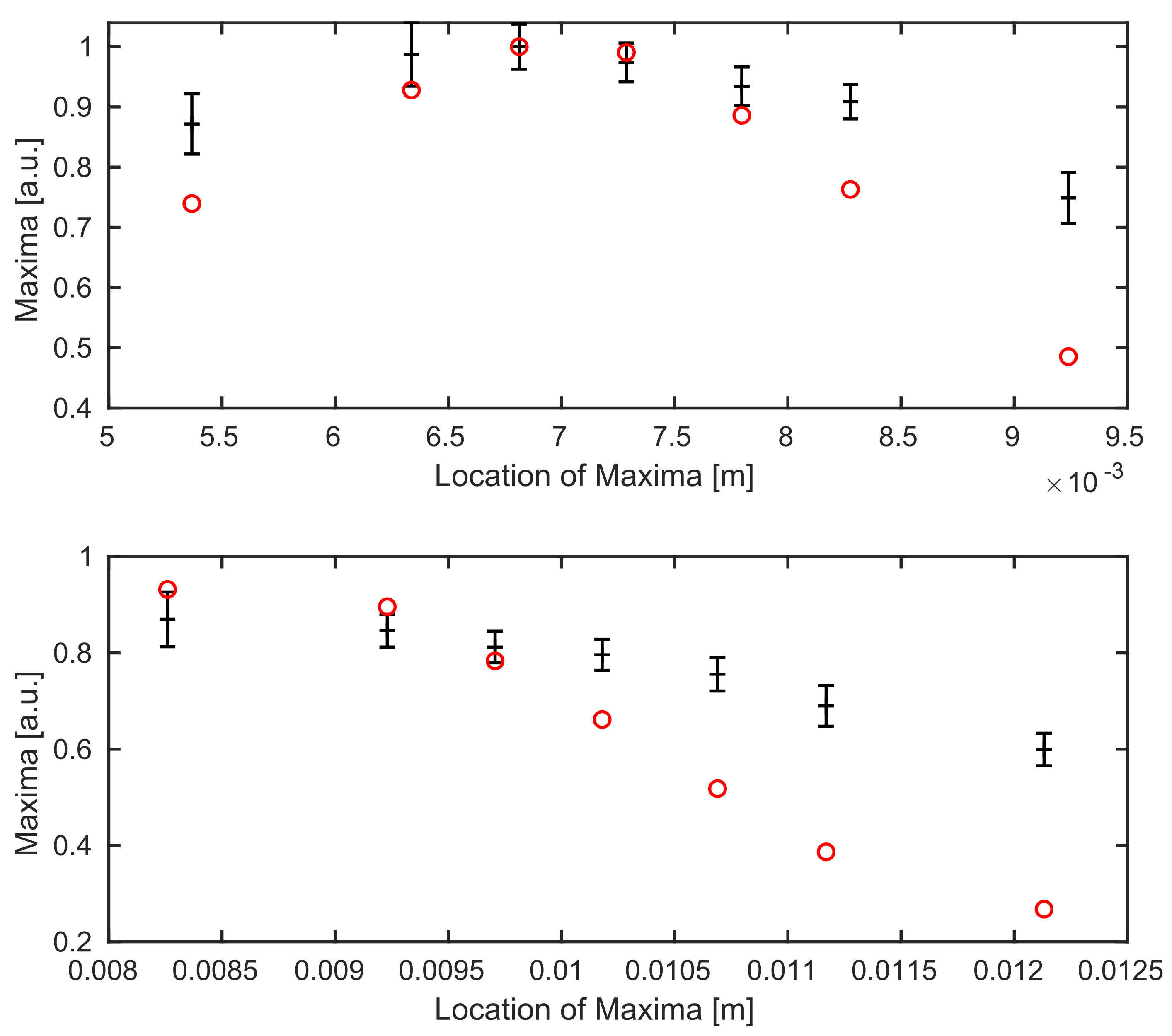
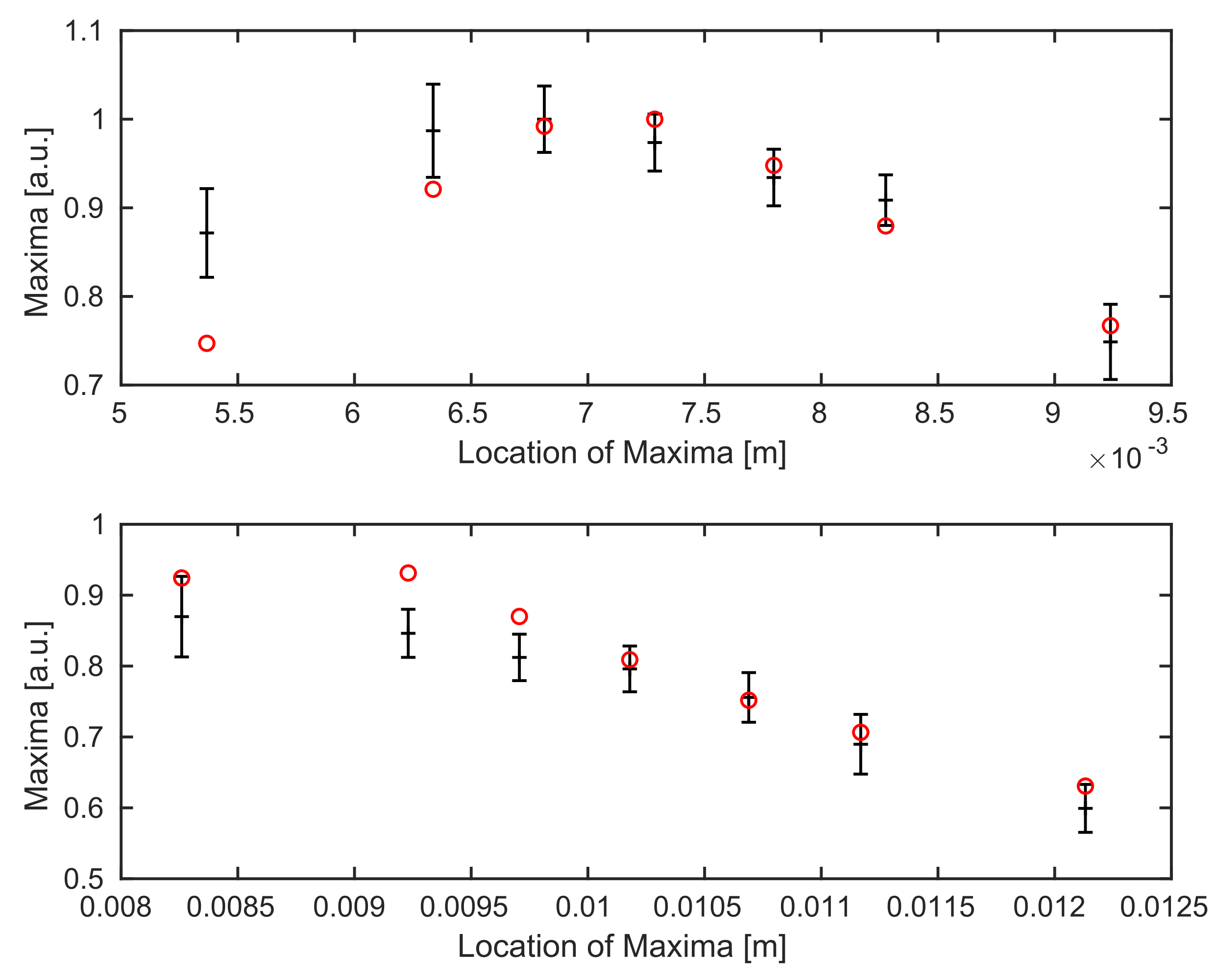
In Figure 6, we see the comparison between experimental data and simulations for both boundaries of the coverglass. Unfortunately, the calibrated parameters from the previous subsection do not yield optimal results, see Figure 6. Similar to Figure 5, a sufficiently strong decrease of the averaged maximum values away from the focus position can be identified in the simulations for the coverglass experiment as well.
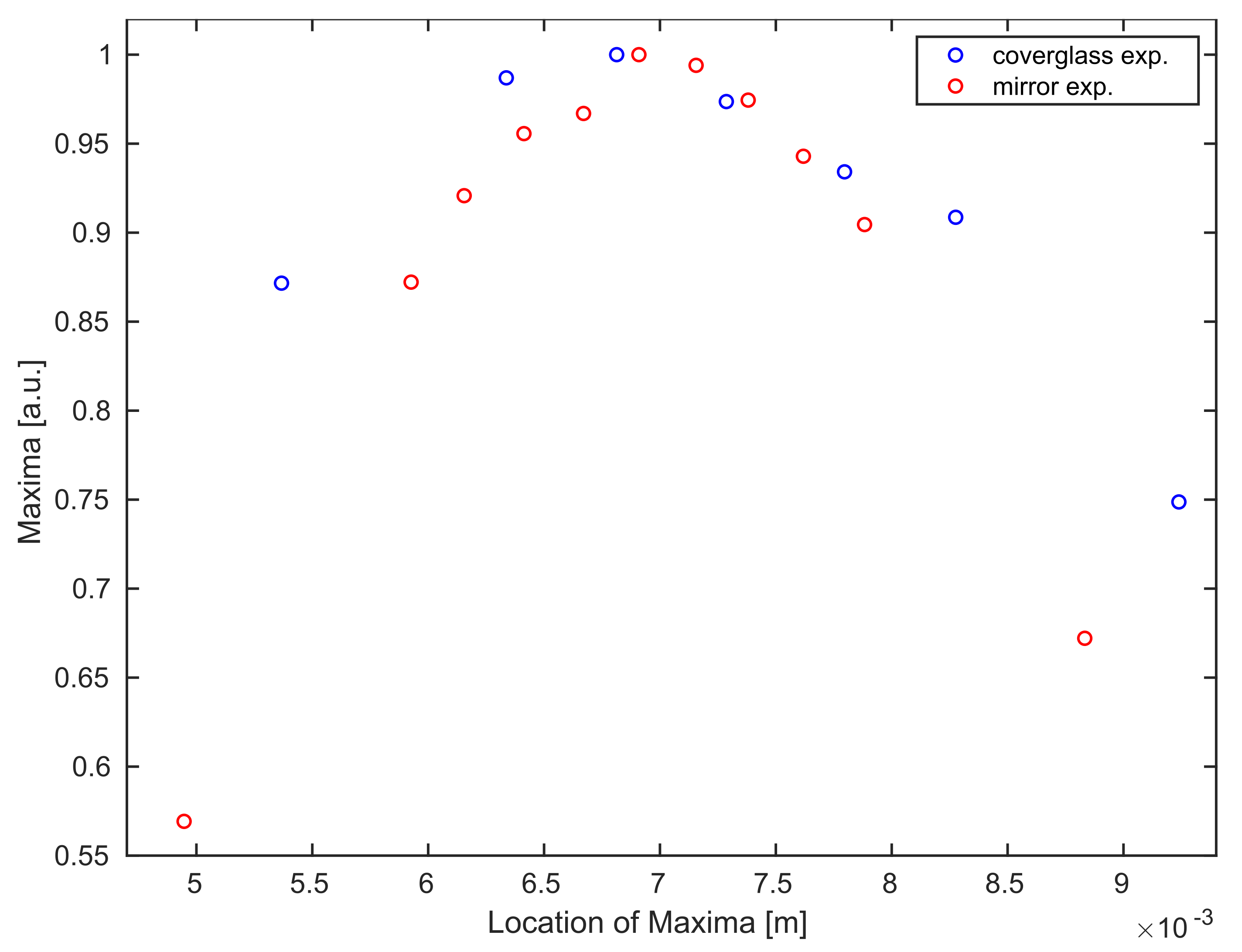
At this point, we remark by comparing the experimental datasets, see Figure 7, that the Gaussian curve for the coverglass experiment shows a slightly stretched behavior. This is explained by the measurement of the returning laser light in a diffusive regime originating from the reflection at a slightly rough coverglass boundary surface.
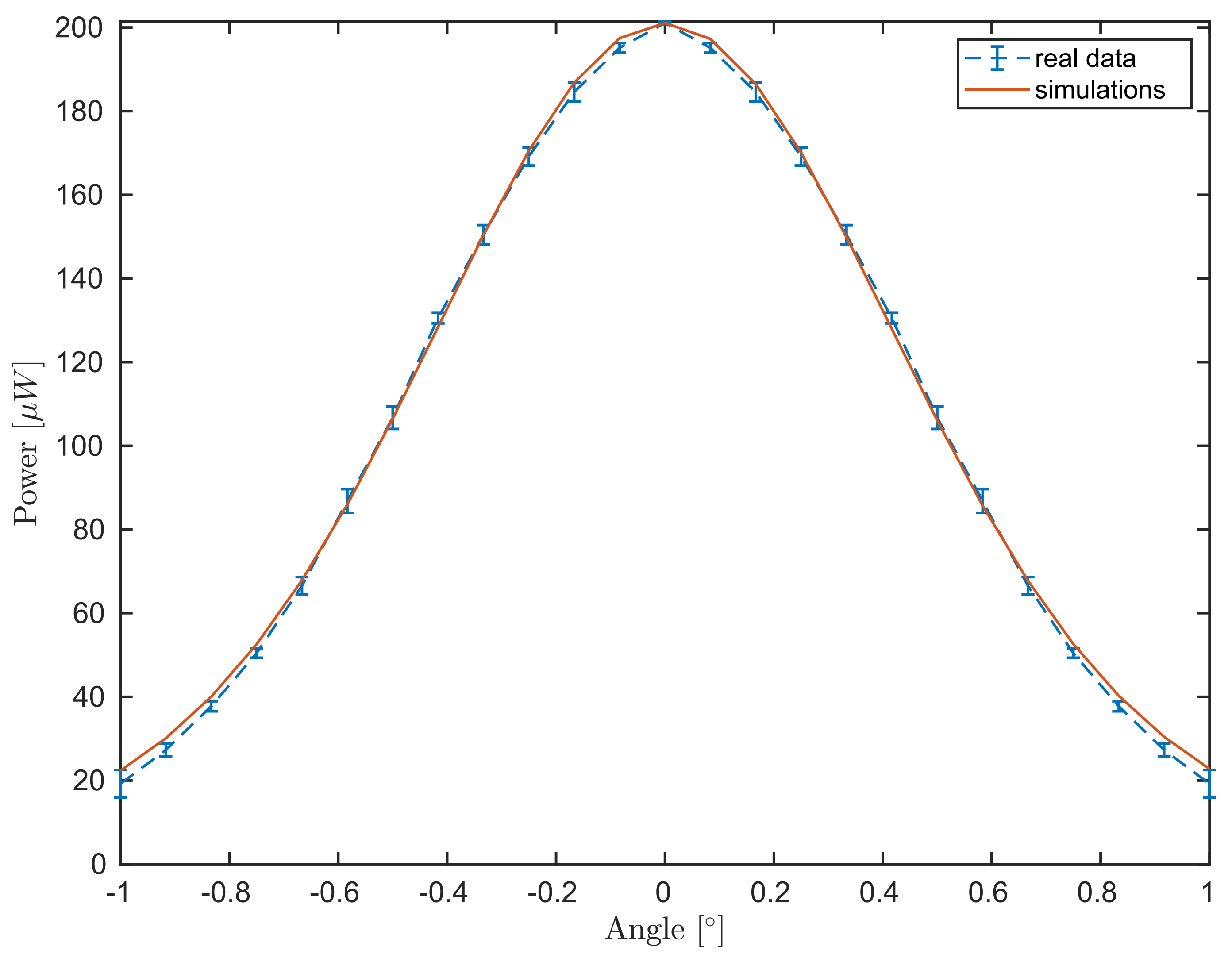
However, updated parameters can be found using an experiment similar to the calibration of and , see Figure 8. In contrast to the calibration, the power measurement for the coverglass includes information of both boundaries and, therefore, the measured field intensity is provided as a sum
where we consider first order reflections only. Due to additional scattering events inside the coverglass material, the background information is smaller than and therefore neglected for the calibration.
A comparison for the coverglass experiment—after updating the system parameters—shows that almost all simulated data points lie inside the estimated range for both boundaries, see Figure 9.
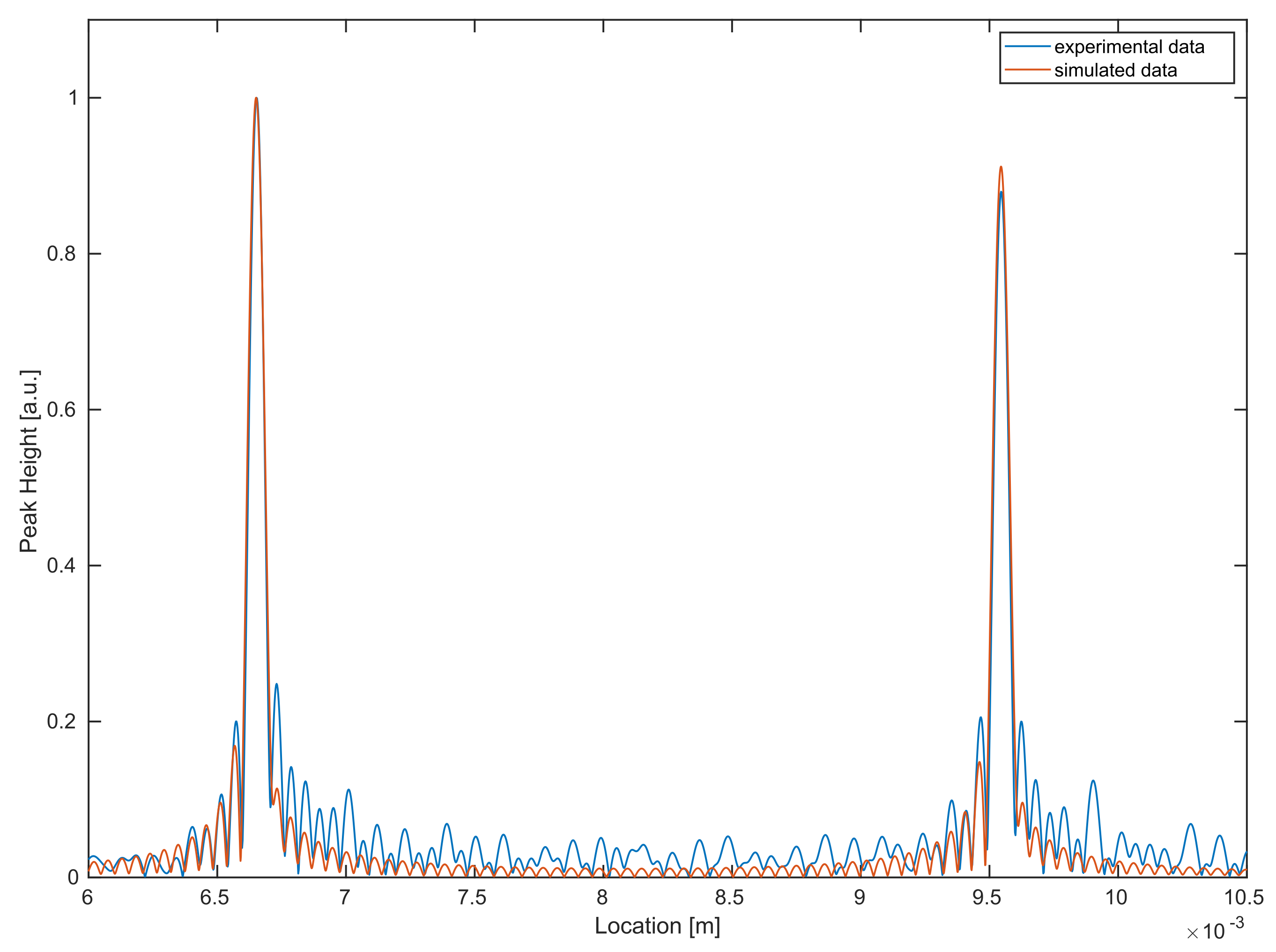
For a better visualization, in Figure 10, a direct comparison between experimental data and the simulations (using recalibrated system parameters) for a single A-scan is provided. In order to obtain a reasonable comparison, both experimental and simulated datasets are normalized to one.
6. Discussion
We have considered samples with a very distinct scattering profile, but still a slight difference in the angular reflectivity profile could be observed for the mirror and the coverglass. For diffusely scattering samples, the proposed description can easily be generalized, especially with the mentioned automatic angular power measurement. An automated measurement would also reduce the error, so that a fast angle scanning procedure could be implemented prior to OCT imaging.
The error in the power vs. focus experiment (see Figure 5 and Figure 6) is caused by power variations inside single B-scans. These are explained by a combination of reasons. The tilt of the sample with respect to the OCT illumination generates a slight continuous change in distance to the focus for each A-scan inside a B-scan. In addition, the scan lens induces a certain curvature of field, resulting in a change of illumination depending on the raster scanning position .
Although the presented results in this work show suitable correspondence with the provided OCT data, we note that the algorithm for solving the minimal-error-solution problem in extracting the beam radius and the angle of acceptance from the power-angle experiment suffers from the fact that the function in Equation (27) is highly oscillating and it is therefore difficult to find an “optimal” set of parameters.
Nevertheless, for a rather large range of values of these parameters, we observe a reasonable match with the experimental data, at least, for simple, layered examples. The model should, however, work nicely also for more complicated samples with different geometries (that is, with more and potentially curved layers).
We expect that this model can be used as a forward model, which simulates the OCT data from the knowledge of the refractive index of the medium and can be used for the corresponding inverse problem of reconstructing the refractive index in the layers.
7. Conclusions
We presented a method to model the image formation in OCT based on a real-life 1300 swept-source setup. In contrast to publications based on plane wave models for the OCT system, the proposed model includes the effect of additional system relevant parameters such as the focus and the beam radius of the incident laser light and the angle of acceptance. We also suggested a way how to determine these (not necessarily a priori known) parameters, either from the OCT data themselves and from calibration measurements.
A comparison between simulation and experiment shows that the presented model together with the derived system and sample parameters produces a quantitatively correct prediction of the OCT data. We therefore expect that this model can serve as a forward model for an inversion algorithm to quantitatively reconstruct the optical material properties of a sample from OCT data, in particular its refractive index.
Author Contributions
Conceptualization, W.D. and P.E.; formal analysis, L.V., L.M. and P.E.; funding acquisition, W.D. and P.E.; investigation, L.V., L.K., L.M. and P.E.; project administration, W.D. and P.E.; Resources, L.K. and W.D.; software, L.V., L.K. and L.M.; visualization, L.V., L.K. and L.M.; writing—original draft, L.V., L.K. and L.M.; writing—review and editing, W.D. and P.E. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Austrian Science Fund (FWF) in the projects F6803-N36 and F6804-N36 within the Special Research Programme SFB F68: “Tomography Across the Scales”. Open Access Funding by the Austrian Science Fund (FWF).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We acknowledge the support by the Austrian Science Fund (FWF) in the projects F6803-N36 and F6804-N36 within the Special Research Programme SFB F68: “Tomography Across the Scales”.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Here, we collect the proofs of the theorems. We start with the one of Theorem 1 which describes the Fourier decomposition of a solution of the Helmholtz equation.
Proof of Theorem 1
To simplify the notation, we shift the coordinate system such that the focal plane is in the origin of the new system and denote the function with new coordinates by Then, we apply the Fourier transform in the first equation of Equation (1) with respect to the -components, resulting in an ordinary differential equation
for the first two components of the electric field. We know that for
is a solution of this problem. Using the Fourier transformed initial data at the plane we find that the coefficients are given by
So far, we have seen that are solutions of the Helmholtz equation, without considering the third component of Finally, we use that is divergence-free to find that
Moreover, taking two times the derivative with respect to we find
which in the end, using also the second derivatives with respect to and , gives
Thus, is also solution of the Helmholtz equation if and only if
This is equivalent to the condition
Since this condition must hold true for every we obtain
and, therefore,
Given the representations of we derive a representation also for the third component of the electric field
Next, we come to the derivation of the far-field representation of the scattered field presented in Theorem 2. This is described, for example, in the book [27] and is based on the stationary phase method.
Lemma A1.
Let denote the set of critical points of the function and assume that is compactly support. Further assume that for every the Hessian matrix H of ϕ satisfies
Then, we have asymptotically as that
Proof.
See [28]. □
We can now apply this stationary phase method, Lemma A1, to the integral in Equation (11).
Proof of Theorem 2
Considering Equation (11) with , the limit , we correspondingly define the phase function
In order to calculate the critical points of , we look for solutions of the equation This gives us for the critical points the condition
for For the sake of simplicity, we define the parameters
that satisfy
Now, rewriting Equation (A2), we obtain
Finally, we come to the derivation of the asymptotic behavior of the intensity of the maxima in the Fourier transform of the OCT signal for small incident angle.
Proof of Lemma 1
Since the analysis of the integral in Equation (36) proceeds along the same lines for and , we simply write to make the notation easier.
We assume that locally around we can write as its Taylor series
Using this in Equation (36), gives
for We leave out the factor for a moment and calculate this integral for the different values of j:
- For , this leads to the integralAfter a change of variables , we obtain
- For we find in the same way
- Similarly, for we obtainwhich is constant with respect to
- Following the same procedure, the remaining integrals for are of the formfor a given pre-factor
The assumption that is small, let us say , yields that the terms of order dominate. Keeping these terms only, results in
□
Proof of Lemma 2
We rewrite given by Equation (38), as
Then, it is clear that
which attains its maximum at □
References
- Fercher, A.F.; Mengedoht, K.; Werner, W. Eye-length measurement by interferometry with partially coherent light. Opt. Lett. 1988, 13, 186. [Google Scholar] [CrossRef] [PubMed]
- Huang, D.; Swanson, E.; Lin, C.; Schuman, J.; Stinson, W.; Chang, W.; Hee, M.; Flotte, T.; Gregory, K.; Puliafito, C.; et al. Optical coherence tomography. Science 1991, 254, 1178–1181. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Drexler, W.; Fujimoto, J.G. Optical Coherence Tomography: Technology and Applications; Biological and Medical Physics, Biomedical Engineering; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Khan, H.A.; Mehmood, A.; Khan, Q.A.; Iqbal, F.; Rasheed, F.; Khan, N.; Pizzimenti, J.J. A major review of optical coherence tomography angiography. Expert Rev. Ophthalmol. 2017, 12, 373–385. [Google Scholar] [CrossRef]
- Baumann, B. Polarization Sensitive Optical Coherence Tomography: A Review of Technology and Applications. Appl. Sci. 2017, 7, 474. [Google Scholar] [CrossRef]
- Zaitsev, V.Y.; Matveyev, A.L.; Matveev, L.A.; Sovetsky, A.A.; Hepburn, M.S.; Mowla, A.; Kennedy, B.F. Strain and elasticity imaging in compression optical coherence elastography: The two-decade perspective and recent advances. J. Biophotonics 2021, 14. [Google Scholar] [CrossRef] [PubMed]
- Liu, M.; Drexler, W. Optical coherence tomography angiography and photoacoustic imaging in dermatology. Photochem. Photobiol. Sci. 2019, 18, 945–962. [Google Scholar] [CrossRef] [PubMed]
- Kennedy, K.M.; Zilkens, R.; Allen, W.M.; Foo, K.Y.; Fang, Q.; Chin, L.; Sanderson, R.W.; Anstie, J.; Wijesinghe, P.; Curatolo, A.; et al. Diagnostic Accuracy of Quantitative Micro-Elastography for Margin Assessment in Breast-Conserving Surgery. Cancer Res. 2020, 80, 1773–1783. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Albrecht, M.; Schnabel, C.; Mueller, J.; Golde, J.; Koch, E.; Walther, J. In Vivo Endoscopic Optical Coherence Tomography of the Healthy Human Oral Mucosa: Qualitative and Quantitative Image Analysis. Diagnostics 2020, 10, 827. [Google Scholar] [CrossRef] [PubMed]
- Schie, I.W.; Placzek, F.; Knorr, F.; Cordero, E.; Wurster, L.M.; Hermann, G.G.; Mogensen, K.; Hasselager, T.; Drexler, W.; Popp, J.; et al. Morpho-molecular signal correlation between optical coherence tomography and Raman spectroscopy for superior image interpretation and clinical diagnosis. Sci. Rep. 2021, 11, 9951. [Google Scholar] [CrossRef] [PubMed]
- Andersen, P.E.; Thrane, L.; Yura, H.T.; Tycho, A.; Jørgensen, T.M.; Frosz, M.H. Advanced modelling of optical coherence tomography systems. Phys. Med. Biol. 2004, 49, 1307–1327. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Wang, R.K.; Elder, J.B. Theoretical model of optical coherence tomography for system optimization and characterization. J. Opt. Soc. Am. 2003, 20, 1792–1803. [Google Scholar] [CrossRef] [PubMed]
- Ralston, T.S.; Marks, D.L.; Carney, P.S.; Boppart, S.A. Inverse scattering for optical coherence tomography. J. Opt. Soc. Am. 2006, 23, 1027–1037. [Google Scholar] [CrossRef] [PubMed]
- Kalkman, J. Fourier-Domain Optical Coherence Tomography Signal Analysisand Numerical Modeling. Int. J. Opt. 2017, 2017. [Google Scholar] [CrossRef]
- Fercher, A.F.; Drexler, W.; Hitzenberger, C.K.; Lasser, T. Optical coherence tomography—Principles and applications. Rep. Prog. Phys. 2003, 66, 239–303. [Google Scholar] [CrossRef]
- Izatt, J.A.; Choma, M.A. Theory of optical coherence tomography. In Optical Coherence Tomography; Drexler, W., Fujimoto, J.G., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 47–72. [Google Scholar]
- Tomlins, P.H.; Wang, R.K. Theory, developments and applications of optical coherence tomography. J. Phys. Appl. Phys. 2005, 38, 2519–2535. [Google Scholar] [CrossRef]
- Drexler, W.; Fujimoto, J.G. Optical Coherence Tomography: Technology and Applications, 2nd ed.; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Brenner, T.; Munro, P.R.T.; Krüger, B.; Kienle, A. Two-dimensional simulation of optical coherence tomography images. Sci. Rep. 2019, 9, 12189. [Google Scholar] [CrossRef] [PubMed]
- Kirillin, M.; Meglinski, I.; Kuzmin, V.; Sergeeva, E.; Myllylä, R. Simulation of optical coherence tomography images by Monte Carlo modeling based on polarization vector approach. Opt. Express 2010, 18, 21714–21724. [Google Scholar] [CrossRef] [PubMed]
- Shlivko, I.L.; Kirillin, M.Y.; Donchenko, E.V.; Ellinsky, D.O.; Garanina, O.E.; Neznakhina, M.S.; Agrba, P.D.; Kamensky, V.A. Identification of layers in optical coherence tomography of skin: Comparative analysis of experimental and Monte Carlo simulated images. Ski. Res. Technol. 2015, 21, 419–425. [Google Scholar] [CrossRef] [PubMed]
- Yao, G.; Wang, L.V. Two-dimensional depth-resolved Mueller matrix characterization of biological tissue by optical coherence tomography. Opt. Lett. 1999, 24, 537–539. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Bai, L. Accurate Monte Carlo simulation of frequency-domain optical coherence tomography. Int. J. Numer. Methods Biomed. Eng. 2019, 35, e3177. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Svelto, O. Principles of Lasers, 5th ed.; Springer: Boston, MA, USA, 2010. [Google Scholar]
- Jackson, J.D. Classical Electrodynamics, 3rd ed.; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Elbau, P.; Mindrinos, L.; Veselka, L. Reconstructing the Optical Parameters of a Layered Medium with Optical Coherence Elastography. In Mathematical and Numerical Approaches for Multi-Wave Inverse Problems; Beilina, L., Bergounioux, M., Christofol, M., Da Silva, A., Litman, A., Eds.; Number 328 in Springer Proceedings in Mathematics & Statistics; Springer: Cham, Switzerland, 2020; pp. 105–126. [Google Scholar] [CrossRef]
- Mandel, L.; Wolf, E. Optical Coherence and Quantum Optics; Cambridge University Press: Cambridge, UK, 1995. [Google Scholar]
- Hörmander, L. The Analysis of Linear Partial Differential Operators I, 2nd ed.; Springer: New York, NY, USA, 2003. [Google Scholar]
Figure 1.
OCT setup: Insight: 1300 swept-source; 25/75% fiber coupler; PC: polarization control; C: circulator; 50/50% fiber coupler for light recombination; FC: fiber collimator; M1, M2: mirrors; Gx, Gy scanning galvanometers; SL: scan lens; S: sample; DBD: dual-balance detector.
Figure 1.
OCT setup: Insight: 1300 swept-source; 25/75% fiber coupler; PC: polarization control; C: circulator; 50/50% fiber coupler for light recombination; FC: fiber collimator; M1, M2: mirrors; Gx, Gy scanning galvanometers; SL: scan lens; S: sample; DBD: dual-balance detector.

Figure 2.
Modeling of the separate parts of the OCT experiment: We start by describing the light beam produced by the laser (the red box) in Section 3.1, we give a representation for the beam in the sample arm which is backscattered from the sample (the orange box) in Section 3.2.1 and is then coupled back into the fiber system via the scan lens (the yellow box) in Section 3.2.4. This is afterwards recombined with the beam from the reference arm (the green box) in Section 3.2.5 and detected by the dual balance detector (the blue box) in Section 3.3.
Figure 2.
Modeling of the separate parts of the OCT experiment: We start by describing the light beam produced by the laser (the red box) in Section 3.1, we give a representation for the beam in the sample arm which is backscattered from the sample (the orange box) in Section 3.2.1 and is then coupled back into the fiber system via the scan lens (the yellow box) in Section 3.2.4. This is afterwards recombined with the beam from the reference arm (the green box) in Section 3.2.5 and detected by the dual balance detector (the blue box) in Section 3.3.

Figure 3.
The near-field for different positions of the focus (red, blue, green) vs. the far-field (black) regime for different positions of the surface. At the dotted lines, indicating where the surface and focus position coincide, the intensities of near- and far-field regime are equal.
Figure 3.
The near-field for different positions of the focus (red, blue, green) vs. the far-field (black) regime for different positions of the surface. At the dotted lines, indicating where the surface and focus position coincide, the intensities of near- and far-field regime are equal.

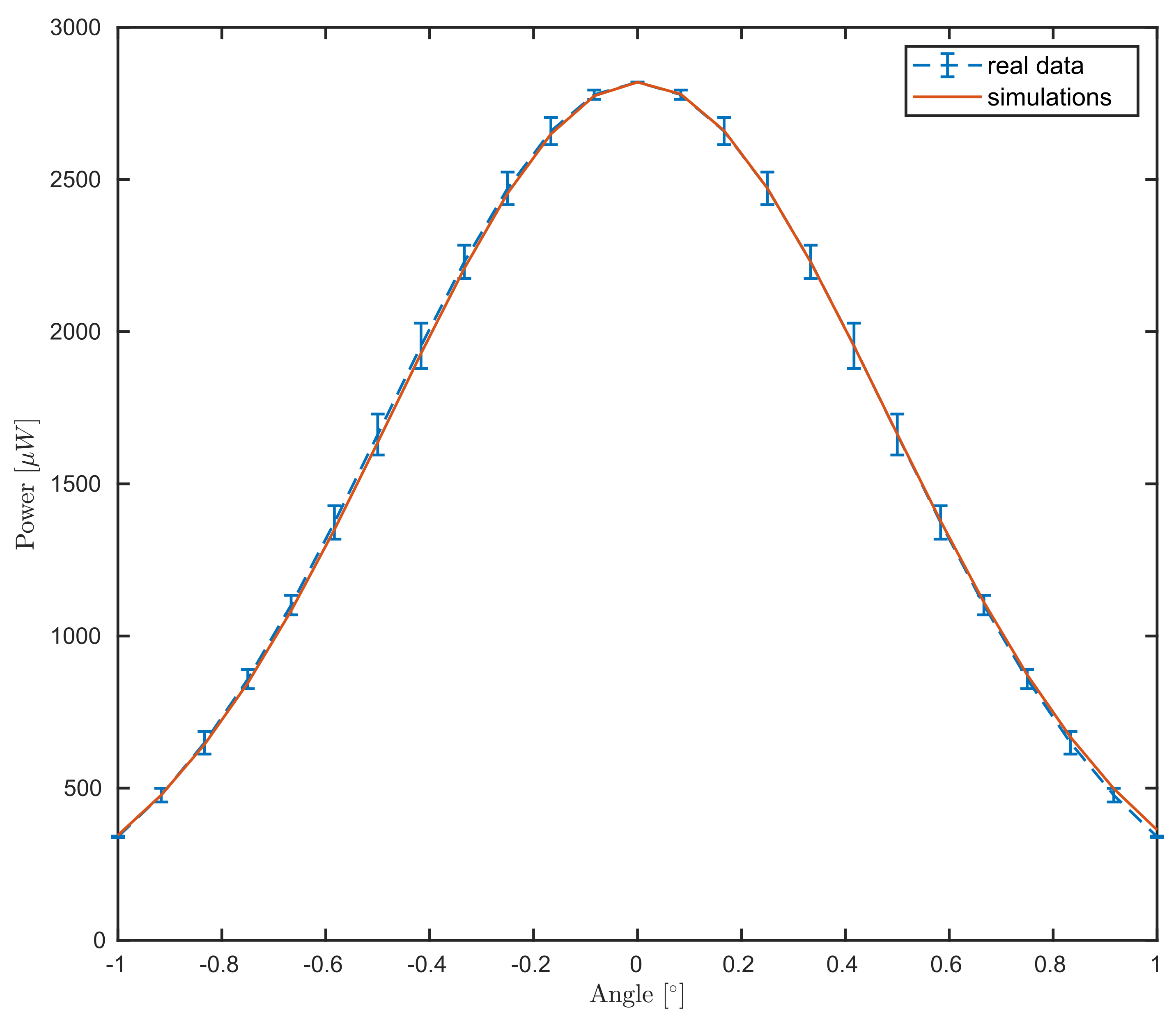
Figure 4.
Comparison between the power meter measurements for different angular steps of the mirror (blue dashed curve) as in Section 2.2 and the simulation (red curve) for Equation (27).
Figure 4.
Comparison between the power meter measurements for different angular steps of the mirror (blue dashed curve) as in Section 2.2 and the simulation (red curve) for Equation (27).

Figure 5.
Comparison of averaged maximum values for all B-scans (of different sample locations) of the experimental data (black with errorbars) and the simulated data points (red) for the mirror experiment.
Figure 5.
Comparison of averaged maximum values for all B-scans (of different sample locations) of the experimental data (black with errorbars) and the simulated data points (red) for the mirror experiment.

Figure 6.
Comparison between the experimental data (black with errorbars) and the simulated (red) data points for calibrated values of and . Top: we see the top boundary surface of the coverglass, bottom: the background surface.
Figure 6.
Comparison between the experimental data (black with errorbars) and the simulated (red) data points for calibrated values of and . Top: we see the top boundary surface of the coverglass, bottom: the background surface.

Figure 7.
Comparison between averaged maximum values for all B-scans of the mirror (red) and the coverglass (blue) experiment.
Figure 7.
Comparison between averaged maximum values for all B-scans of the mirror (red) and the coverglass (blue) experiment.

Figure 8.
Angular scattering profile of a coverglass: comparing experimental data (blue dashed line) with simulations (red).
Figure 8.
Angular scattering profile of a coverglass: comparing experimental data (blue dashed line) with simulations (red).

Figure 9.
Comparison between averaged maximum values of the experimental data (black) and simulations (red) for different position through the focus after the recalibration of values and . Top: we see the top surface, bottom: the background surface of the underlying coverglass.
Figure 9.
Comparison between averaged maximum values of the experimental data (black) and simulations (red) for different position through the focus after the recalibration of values and . Top: we see the top surface, bottom: the background surface of the underlying coverglass.

Figure 10.
Comparison between experimental (blue) and simulated (red) data for a single A-scan.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
List of parameters: The central wavelength and the wavenumbers and are determined through the specifications of the used swept-source. The beam radius and the angle of acceptance were found through calibration (see Section 5.1). The numerical aperture NA was calculated from the angle of acceptance. The parameter is given for a typical tilting angle in our experiments.
Table 1.
List of parameters: The central wavelength and the wavenumbers and are determined through the specifications of the used swept-source. The beam radius and the angle of acceptance were found through calibration (see Section 5.1). The numerical aperture NA was calculated from the angle of acceptance. The parameter is given for a typical tilting angle in our experiments.
| Parameter | Value | Unit |
|---|---|---|
| central wavelength | 1300 | |
| beam radius at focus | ||
| angle of acceptance | 1.5709 | |
| 0.037 | ||
| , , | , , |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Veselka, L.; Krainz, L.; Mindrinos, L.; Drexler, W.; Elbau, P. A Quantitative Model for Optical Coherence Tomography. Sensors 2021, 21, 6864. https://0-doi-org.brum.beds.ac.uk/10.3390/s21206864
AMA Style
Veselka L, Krainz L, Mindrinos L, Drexler W, Elbau P. A Quantitative Model for Optical Coherence Tomography. Sensors. 2021; 21(20):6864. https://0-doi-org.brum.beds.ac.uk/10.3390/s21206864
Chicago/Turabian StyleVeselka, Leopold, Lisa Krainz, Leonidas Mindrinos, Wolfgang Drexler, and Peter Elbau. 2021. "A Quantitative Model for Optical Coherence Tomography" Sensors 21, no. 20: 6864. https://0-doi-org.brum.beds.ac.uk/10.3390/s21206864
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.