
Multiple Participants’ Discrete Activity Recognition in a Well-Controlled Environment Using Universal Software Radio Peripheral Wireless Sensing

 ,
,  , , , , , , , and
, , , , , , , and
Abstract
:1. Introduction
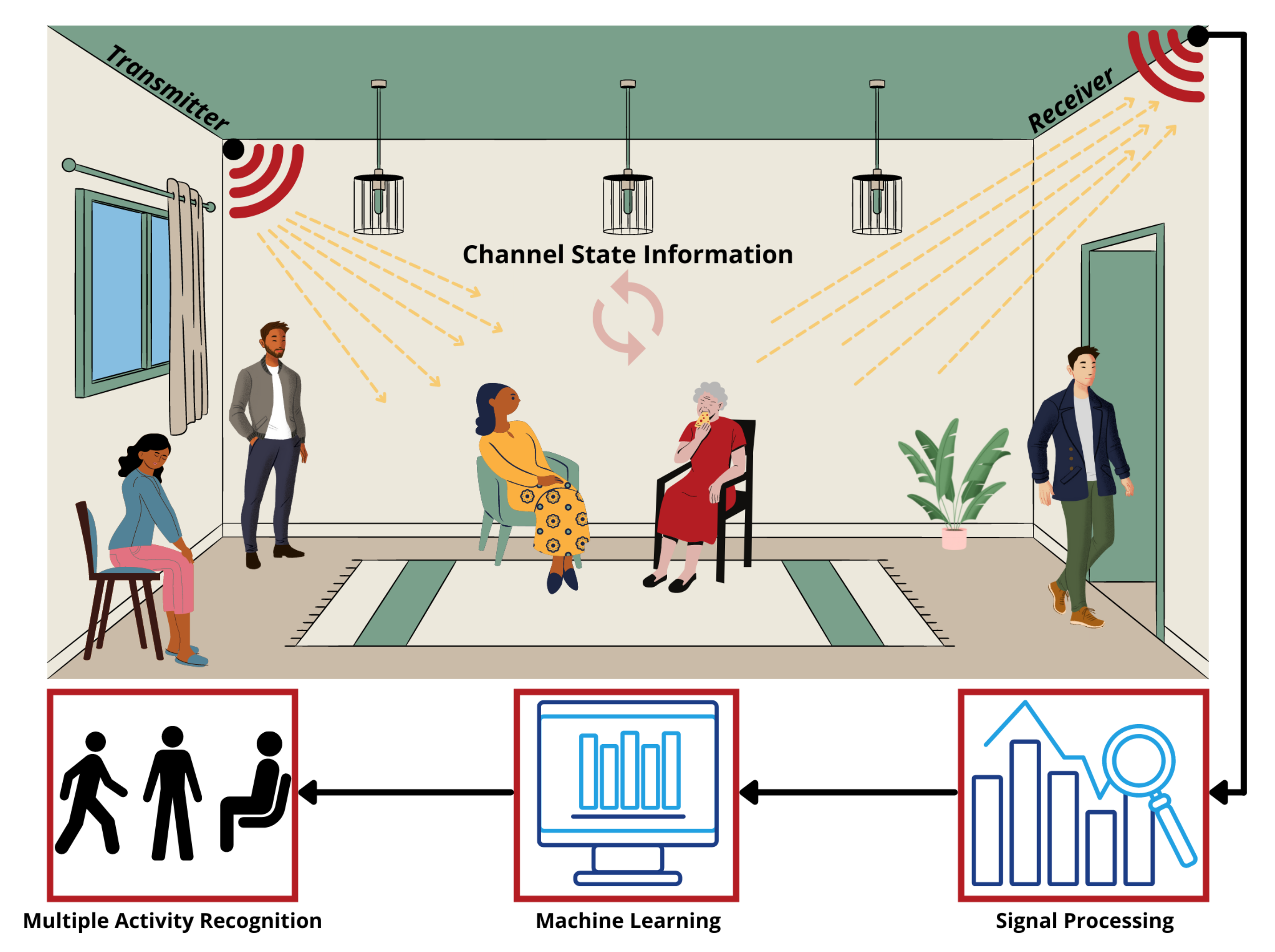
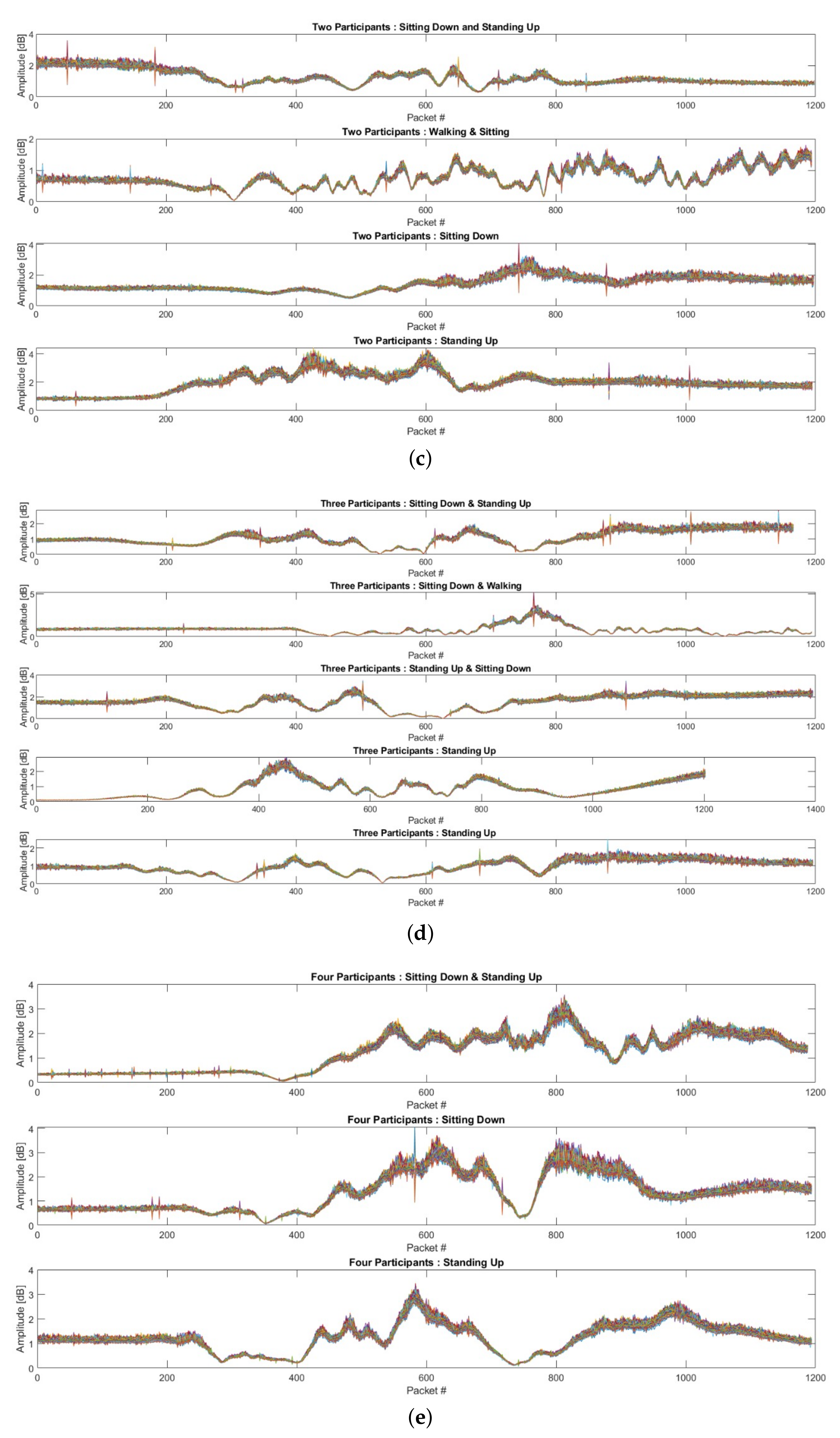
- Group activity: In a group activity, two or more subjects perform a common task simultaneously, for example two subjects performing a walking activity;
- Multi-individual activity: In a multi-individual activity, two or more subjects perform tasks that are not related. For example, one subject performs the sitting activity, while another subject performs the standing activity;
- Mixed activity: In a mixed activity, both above-mentioned activities are considered, for example two subjects at the same time performing the walking activity, while one subject performs the sitting activity.
2. Related Work
3. Methodology
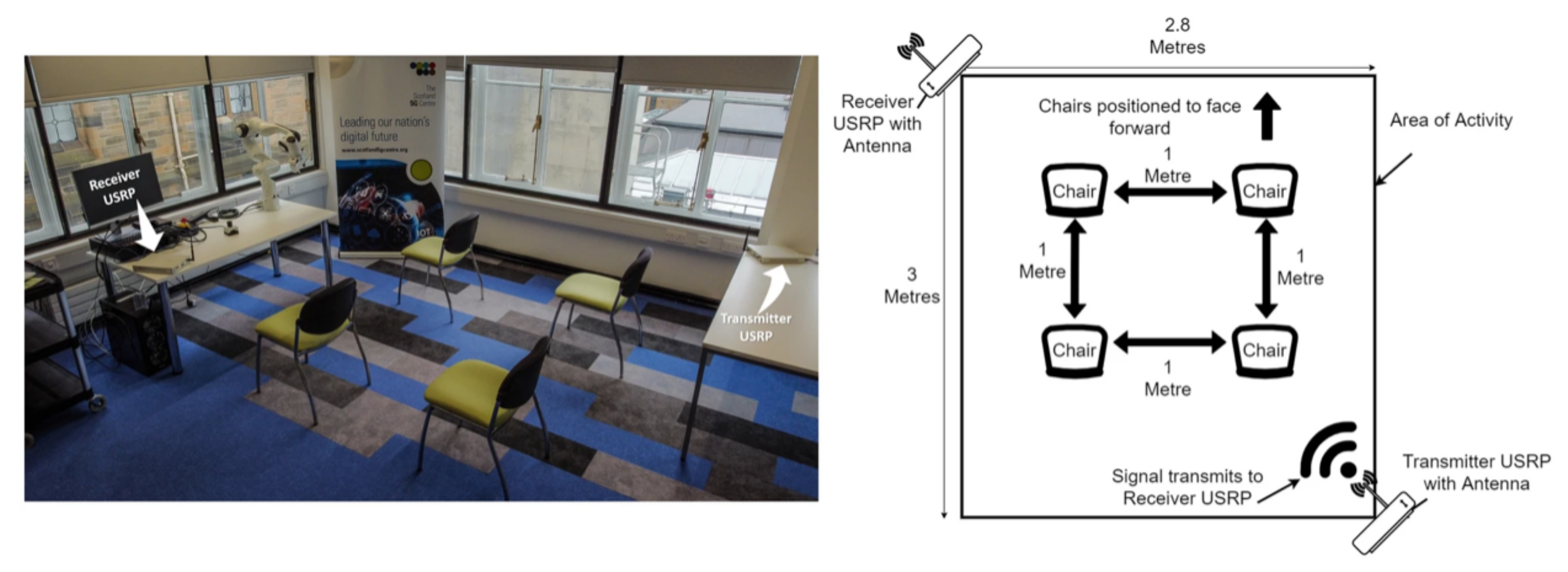
3.1. Experimental Scheme
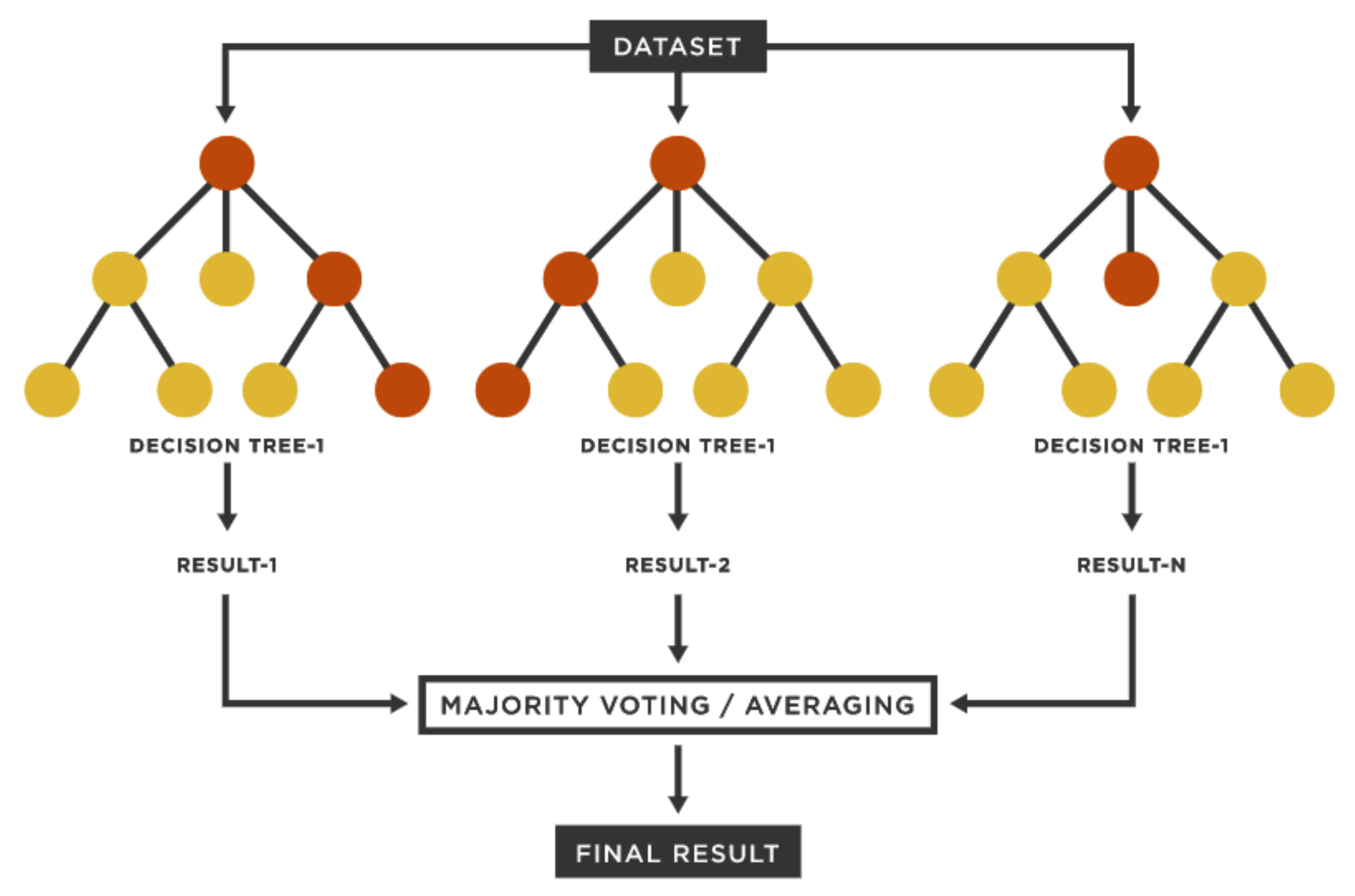
- Instead of deep learning, we adopted an ensemble-learning-based solution in this paper. The ML ensemble technique is explained in Section 3.5, while Section 4 reveals the experimental outcomes based on an ensemble approach for the recognition of multiple activity classes;
- In order to design a lightweight scheme that can be effectively utilised for the real-time system, we exceedingly reduced the data points from the original dataset. The details regarding the employed data for training and testing are provided in the first paragraph of Section 4;
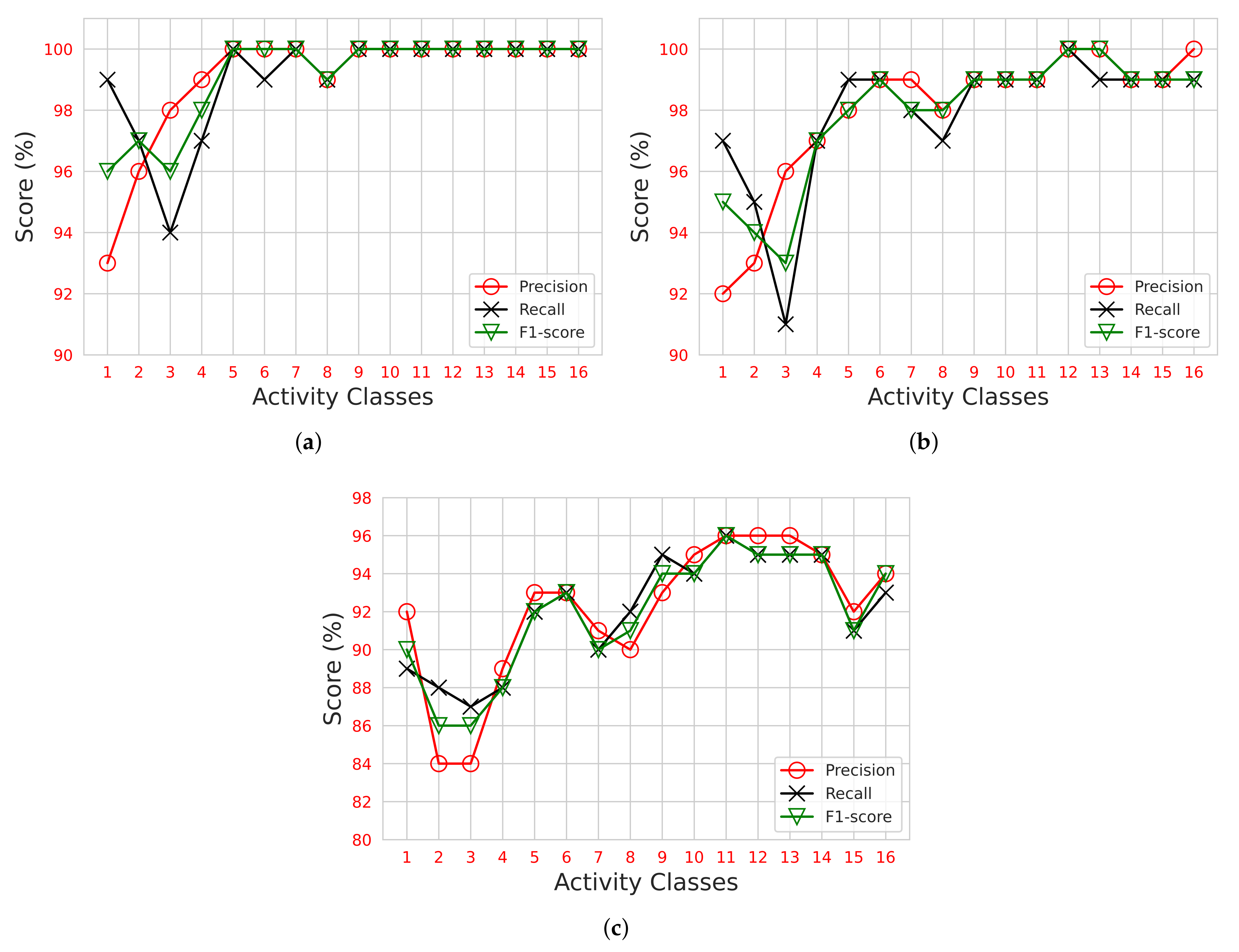
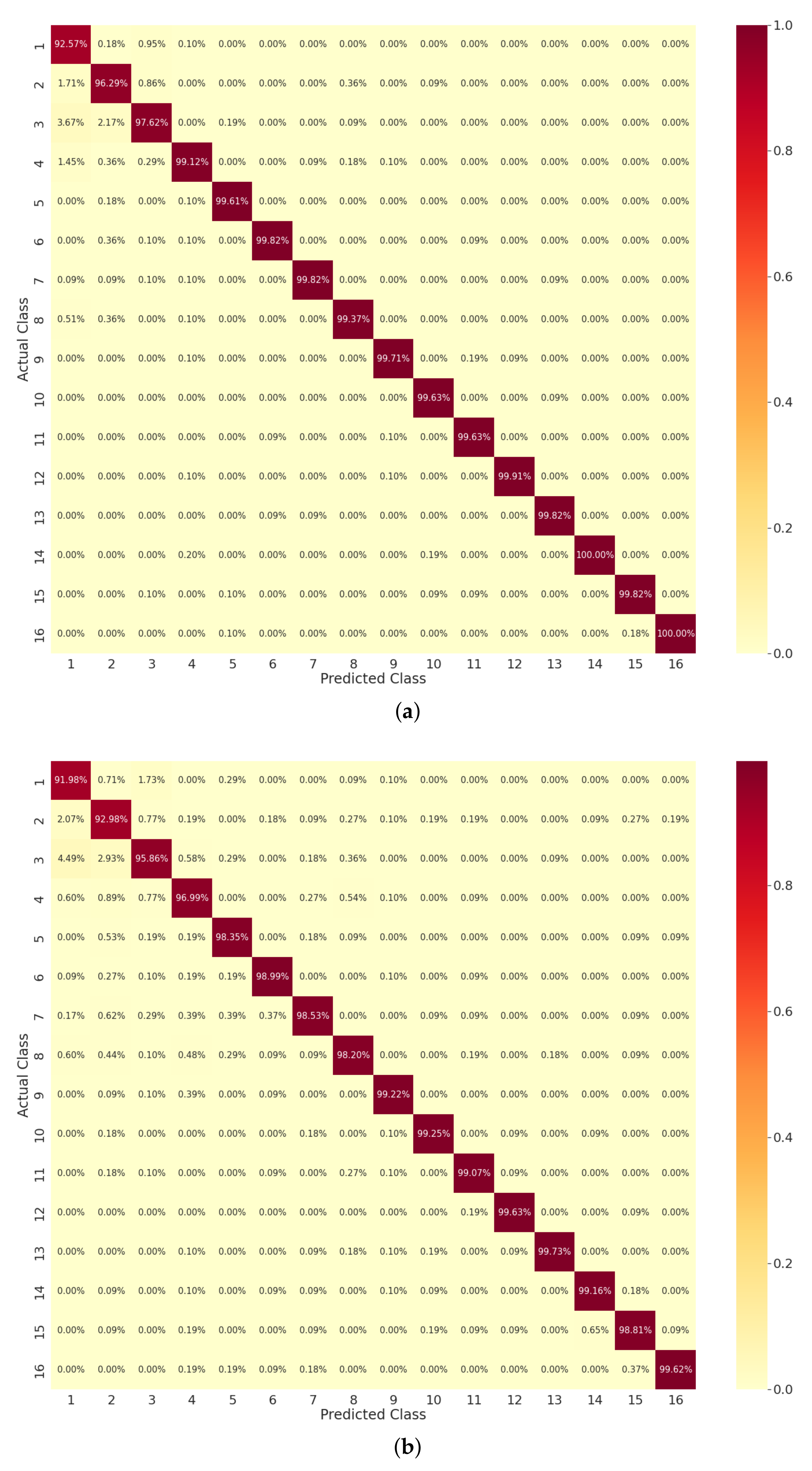
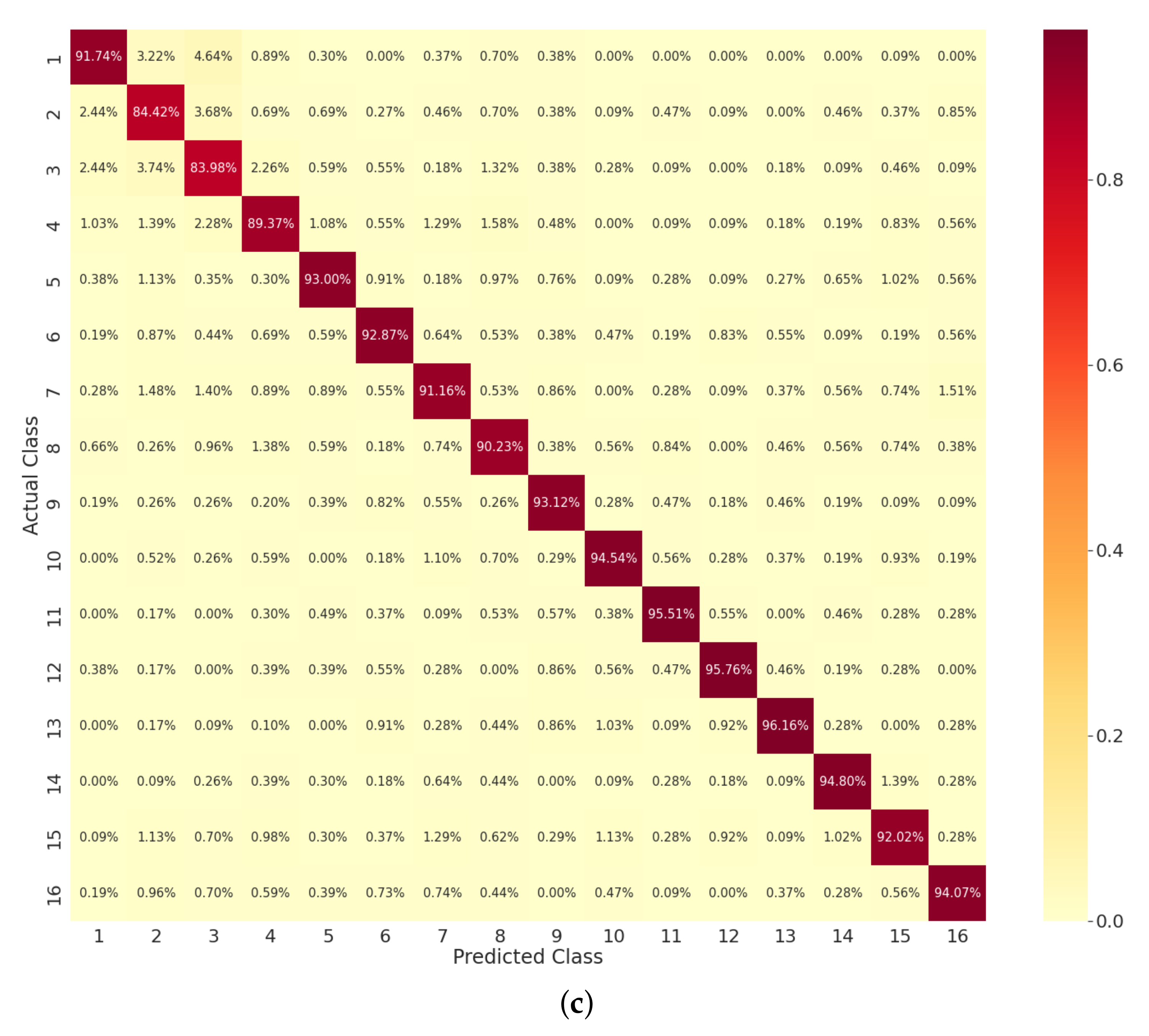
- Instead of assessing a classifier’s efficiency based on accuracy and a confusion matrix, we exploited six distinct criteria to evaluate the performance of the trained ML classifiers, including accuracy, precision, recall, F1-score, confusion matrix, and model training duration. The reason for selecting multiple evaluation criteria is that classifiers can fail to correctly identify some classes, even if the overall accuracy is higher (e.g., due to excessive false positives and lower true positives). However, the precision will decrease significantly.
3.2. Hardware Design
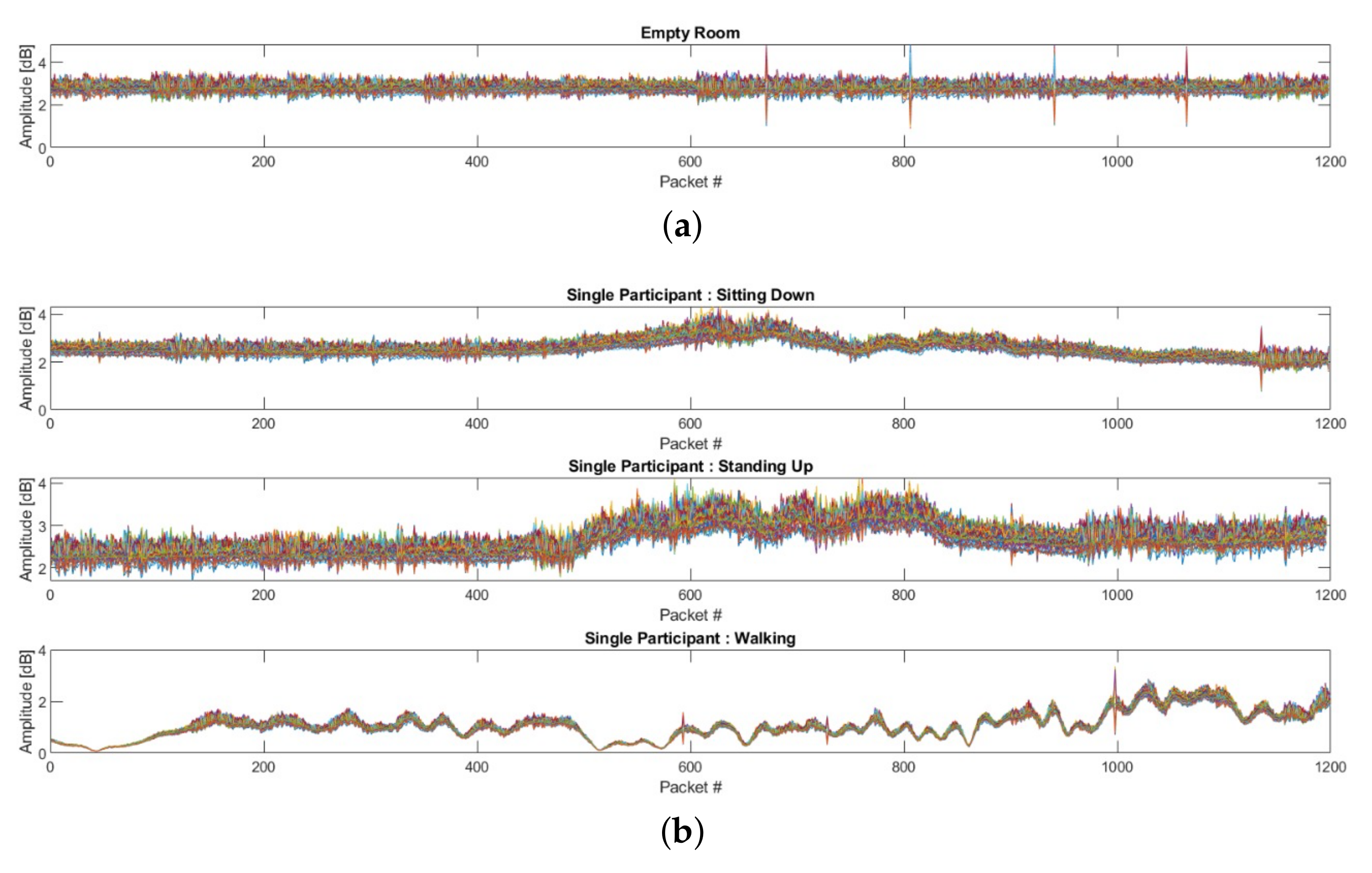
3.3. Data Acquisition
3.4. Data Wrangling
- In the initial phase, as shown in Equation (4), each sample of CSI data was averaged over all 51 subcarriers to obtain a single averaged data sample for consequent processing.where is the ith data sample, which portrays an average across equivalent subcarriers for ;
- After that, each averaged data sample was smoothed and minor variations were removed using the Butterworth lowpass filter of order ;
- Subsequently, the approximation coefficients for every smooth data sample were obtained utilising the discrete wavelet transform with a Haar basis function at Level 3. Since the approximation coefficients reflect the turnout of the lowpass filter in the discrete wavelet transform, it further assisted the noise reduction. The downsampling and convolution processes entailed in the wavelet decomposition across all three extents are expressed mathematically as follows:where for represents the lowpass filter of length K per decomposition level, for represents the smooth signal of length M after implementing the Butterworth lowpass filter, and for levels represents the approximation coefficient of three levels of the discrete wavelet transform.
3.5. Ensemble-Technique-Based Training
4. Experimental Findings
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shah, S.A.; Fioranelli, F. RF sensing technologies for assisted daily living in healthcare: A comprehensive review. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 26–44. [Google Scholar] [CrossRef] [Green Version]
- Taylor, W.; Shah, S.A.; Dashtipour, K.; Zahid, A.; Abbasi, Q.H.; Imran, M.A. An intelligent non-invasive real-time human activity recognition system for next-generation healthcare. Sensors 2020, 20, 2653. [Google Scholar] [CrossRef] [PubMed]
- Estrela, V.V.; KHELASSI, A.; Monteiro, A.C.B.; Iano, Y.; Razmjooy, N.; Martins, D.; Rocha, D.T. Why software-defined radio (SDR) matters in healthcare? Med. Technol. J. 2019, 3, 421–429. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, J.; Chen, Y.; Gruteser, M.; Yang, J.; Liu, H. E-eyes: Device-free location-oriented activity identification using fine-grained wifi signatures. In Proceedings of the 20th Annual International Conference on Mobile Computing and Networking, Maui, HI, USA, 7–11 September 2014; pp. 617–628. [Google Scholar]
- Fioranelli, F.; Le Kernec, J.; Shah, S.A. Radar for health care: Recognizing human activities and monitoring vital signs. IEEE Potentials 2019, 38, 16–23. [Google Scholar] [CrossRef] [Green Version]
- Yatani, K.; Truong, K.N. Bodyscope: A wearable acoustic sensor for activity recognition. In Proceedings of the 2012 ACM Conference on Ubiquitous Computing, Pittsburgh, PA, USA, 5–8 September 2012; pp. 341–350. [Google Scholar]
- Dehbandi, B.; Barachant, A.; Smeragliuolo, A.H.; Long, J.D.; Bumanlag, S.J.; He, V.; Lampe, A.; Putrino, D. Using data from the Microsoft Kinect 2 to determine postural stability in healthy subjects: A feasibility trial. PLoS ONE 2017, 12, e0170890. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Latif, S.; Qadir, J.; Farooq, S.; Imran, M.A. How 5g wireless (and concomitant technologies) will revolutionize healthcare? Future Internet 2017, 9, 93. [Google Scholar] [CrossRef] [Green Version]
- Saeed, U.; Shah, S.Y.; Zahid, A.; Ahmad, J.; Imran, M.A.; Abbasi, Q.H.; Shah, S.A. Wireless Channel Modelling for Identifying Six Types of Respiratory Patterns with SDR Sensing and Deep Multilayer Perceptron. IEEE Sens. J. 2021, 21, 20833–20840. [Google Scholar] [CrossRef]
- Malasinghe, L.P.; Ramzan, N.; Dahal, K. Remote patient monitoring: A comprehensive study. J. Ambient Intell. Humaniz. Comput. 2019, 10, 57–76. [Google Scholar] [CrossRef] [Green Version]
- Gravina, R.; Ma, C.; Pace, P.; Aloi, G.; Russo, W.; Li, W.; Fortino, G. Cloud-based Activity-aaService cyber–physical framework for human activity monitoring in mobility. Future Gener. Comput. Syst. 2017, 75, 158–171. [Google Scholar] [CrossRef]
- Fortino, G.; Parisi, D.; Pirrone, V.; Di Fatta, G. BodyCloud: A SaaS approach for community body sensor networks. Future Gener. Comput. Syst. 2014, 35, 62–79. [Google Scholar] [CrossRef] [Green Version]
- Lucero, S. IoT platforms: Enabling the Internet of Things. 2016. Available online: https://cdn.ihs.com/www/pdf/enabling-IOT.pdf (accessed on 5 November 2021).
- Li, Q.; Gravina, R.; Li, Y.; Alsamhi, S.H.; Sun, F.; Fortino, G. Multi-user activity recognition: Challenges and opportunities. Inf. Fusion 2020, 63, 121–135. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, L.; Liu, Y. Towards omnidirectional passive human detection. In Proceedings of the 2013 Proceedings IEEE INFOCOM, Turin, Italy, 14–19 April 2013; pp. 3057–3065. [Google Scholar]
- Shah, S.A.; Tahir, A.; Ahmad, J.; Zahid, A.; Pervaiz, H.; Shah, S.Y.; Ashleibta, A.M.A.; Hasanali, A.; Khattak, S.; Abbasi, Q.H. Sensor fusion for identification of freezing of gait episodes using WiFi and radar imaging. IEEE Sens. J. 2020, 20, 14410–14422. [Google Scholar] [CrossRef]
- Zhou, R.; Lu, X.; Zhao, P.; Chen, J. Device-free presence detection and localization with SVM and CSI fingerprinting. IEEE Sens. J. 2017, 17, 7990–7999. [Google Scholar] [CrossRef]
- Xi, W.; Zhao, J.; Li, X.Y.; Zhao, K.; Tang, S.; Liu, X.; Jiang, Z. Electronic frog eye: Counting crowd using WiFi. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27April–2 May 2014; pp. 361–369. [Google Scholar]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Wang, G.; Zou, Y.; Zhou, Z.; Wu, K.; Ni, L.M. We can hear you with WiFi! IEEE Trans. Mob. Comput. 2016, 15, 2907–2920. [Google Scholar] [CrossRef]
- Ali, K.; Liu, A.X.; Wang, W.; Shahzad, M. Keystroke recognition using wifi signals. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 90–102. [Google Scholar]
- Liu, J.; Chen, Y.; Wang, Y.; Chen, X.; Cheng, J.; Yang, J. Monitoring vital signs and postures during sleep using WiFi signals. IEEE Internet Things J. 2018, 5, 2071–2084. [Google Scholar] [CrossRef]
- Gao, Q.; Tong, J.; Wang, J.; Ran, Z.; Pan, M. Device-Free Multi-Person Respiration Monitoring Using WiFi. IEEE Trans. Veh. Technol. 2020, 69, 14083–14087. [Google Scholar] [CrossRef]
- Gu, Y.; Ren, F.; Li, J. Paws: Passive human activity recognition based on wifi ambient signals. IEEE Internet Things J. 2015, 3, 796–805. [Google Scholar] [CrossRef]
- Sigg, S.; Scholz, M.; Shi, S.; Ji, Y.; Beigl, M. RF-sensing of activities from non-cooperative subjects in device-free recognition systems using ambient and local signals. IEEE Trans. Mob. Comput. 2013, 13, 907–920. [Google Scholar] [CrossRef]
- Van Dorp, P.; Groen, F. Feature-based human motion parameter estimation with radar. IET Radar, Sonar Navig. 2008, 2, 135–145. [Google Scholar] [CrossRef]
- Seyfioğlu, M.S.; Özbayoğlu, A.M.; Gürbüz, S.Z. Deep convolutional autoencoder for radar-based classification of similar aided and unaided human activities. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1709–1723. [Google Scholar] [CrossRef]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Understanding and modeling of wifi signal based human activity recognition. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 65–76. [Google Scholar]
- Du, L.; Li, L.; Wang, B.; Xiao, J. Micro-Doppler feature extraction based on time-frequency spectrogram for ground moving targets classification with low-resolution radar. IEEE Sens. J. 2016, 16, 3756–3763. [Google Scholar] [CrossRef]
- Saeed, U.; Shah, S.Y.; Alotaibi, A.A.; Althobaiti, T.; Ramzan, N.; Abbasi, Q.H.; Shah, S.A. Portable UWB RADAR sensing system for transforming subtle chest movement into actionable micro-doppler signatures to extract respiratory rate exploiting ResNet algorithm. IEEE Sens. J. 2021, 21, 23518–23526. [Google Scholar] [CrossRef]
- Ashleibta, A.M.; Zahid, A.; Shah, S.A.; Imran, M.A.; Abbasi, Q.H. Software Defined Radio Based Testbed for Large Scale Body Movements. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, Montreal, QC, Canada, 4–11 July 2020; pp. 2079–2080. [Google Scholar]
- Zhang, T.; Song, T.; Chen, D.; Zhang, T.; Zhuang, J. WiGrus: A WiFi-based gesture recognition system using software-defined radio. IEEE Access 2019, 7, 131102–131113. [Google Scholar] [CrossRef]
- Pu, Q.; Gupta, S.; Gollakota, S.; Patel, S. Whole-home gesture recognition using wireless signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, New York, NY, USA, 30 September–4 October 2013; pp. 27–38. [Google Scholar]
- Wang, W.; Liu, A.X.; Shahzad, M.; Ling, K.; Lu, S. Device-free human activity recognition using commercial WiFi devices. IEEE J. Sel. Areas Commun. 2017, 35, 1118–1131. [Google Scholar] [CrossRef]
- Kellogg, B.; Talla, V.; Gollakota, S. Bringing gesture recognition to all devices. In Proceedings of the 11th {USENIX} Symposium on Networked Systems Design and Implementation ({NSDI} 14), Seattle, WA, USA, 2–4 April 2014; pp. 303–316. [Google Scholar]
- Ashleibta, A.M.; Abbasi, Q.H.; Shah, S.A.; Khalid, M.A.; AbuAli, N.A.; Imran, M.A. Non-Invasive RF Sensing for Detecting Breathing Abnormalities using Software Defined Radios. IEEE Sens. J. 2020, 21, 5111–5118. [Google Scholar] [CrossRef]
- Ashleibta, A.M.; Taha, A.; Khan, M.A.; Taylor, W.; Tahir, A.; Zoha, A.; Abbasi, Q.H.; Imran, M.A. 5g-enabled contactless multi-user presence and activity detection for independent assisted living. Sci. Rep. 2021, 11, 1–15. [Google Scholar]
- Saeed, U.; Jan, S.U.; Lee, Y.D.; Koo, I. Fault diagnosis based on extremely randomized trees in wireless sensor networks. Reliab. Eng. Syst. Saf. 2021, 205, 107284. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Participants | No. of Classes | Activities Performed | No. of Data Samples |
|---|---|---|---|
| 0 | 1 | Empty Room | 117 |
| 1 | 2 | 1 Sitting | 140 |
| 3 | 1 Standing | 140 | |
| 4 | 1 Walking | 140 | |
| 2 | 5 | 1 Sitting + 1 Standing | 100 |
| 6 | 1 Walking + 1 Sitting | 100 | |
| 7 | 2 Sitting | 100 | |
| 8 | 2 Standing | 100 | |
| 3 | 9 | 1 Sitting + 2 Standing | 120 |
| 10 | 1 Walking + 2 Sitting | 120 | |
| 11 | 2 Sitting + 1 Standing | 100 | |
| 12 | 3 Sitting | 100 | |
| 13 | 3 Standing | 100 | |
| 4 | 14 | 4 Sitting | 100 |
| 15 | 4 Standing | 100 | |
| 16 | 2 Sitting + 2 Standing | 100 |
| Parameter | Value |
|---|---|
| Platform | USRP X300/310 |
| OFDM Subcarriers | 51 |
| Operating Frequency | 3.75 GHz |
| Transmitter Gain | 70 dB |
| Receiver Gain | 50 dB |
| Classifier | Hyperparameters |
|---|---|
| Extra Tree | bootstrap = False ccp − alpha = 0 class − weight = None criterion = gini max − depth = None max − features = auto max − leaf − nodes = None max − samples = None min − impurity − decrease = 0 min − impurity − split = None min − samples − leaf = 1 min − samples − split = 2 min − weight − fraction − leaf = 0 n − estimators = 5 n − jobs = None oob − score = False random − state = None verbose = 0 warm − start = False |
| Random Forest | bootstrap = True ccp − alpha = 0 class − weight = None criterion = gini max − depth = None max − features = auto max − leaf − nodes = None max − samples = None min − impurity − decrease = 0 min − impurity − split = None min − samples − leaf = 1 min − samples − split = 2 min − weight − fraction − leaf = 0 n − estimators = 5 n − jobs = None oob − score = False random − state = None verbose = 0 warm − start = False |
| Decision Tree | ccp − alpha = 0 class − weight = None criterion = gini max − depth = None max − features = None max − leaf − nodes = None min − impurity − decrease = 0 min − impurity − split = None min − samples − leaf = 1 min − samples − split = 2 min − weight − fraction − leaf = 0 presort = deprecated random − state = None splitter = best |
| Classifier | Training Time | Accuracy |
|---|---|---|
| Extra Tree | 2.24 s | 98% |
| Random Forest | 10.52 s | 97% |
| Decision Tree | 120.61 s | 90% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saeed, U.; Yaseen Shah, S.; Aziz Shah, S.; Liu, H.; Alhumaidi Alotaibi, A.; Althobaiti, T.; Ramzan, N.; Ullah Jan, S.; Ahmad, J.; Abbasi, Q.H. Multiple Participants’ Discrete Activity Recognition in a Well-Controlled Environment Using Universal Software Radio Peripheral Wireless Sensing. Sensors 2022, 22, 809. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030809
Saeed U, Yaseen Shah S, Aziz Shah S, Liu H, Alhumaidi Alotaibi A, Althobaiti T, Ramzan N, Ullah Jan S, Ahmad J, Abbasi QH. Multiple Participants’ Discrete Activity Recognition in a Well-Controlled Environment Using Universal Software Radio Peripheral Wireless Sensing. Sensors. 2022; 22(3):809. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030809
Chicago/Turabian StyleSaeed, Umer, Syed Yaseen Shah, Syed Aziz Shah, Haipeng Liu, Abdullah Alhumaidi Alotaibi, Turke Althobaiti, Naeem Ramzan, Sana Ullah Jan, Jawad Ahmad, and Qammer H. Abbasi. 2022. "Multiple Participants’ Discrete Activity Recognition in a Well-Controlled Environment Using Universal Software Radio Peripheral Wireless Sensing" Sensors 22, no. 3: 809. https://0-doi-org.brum.beds.ac.uk/10.3390/s22030809