
Real-Time Multi-Class Disturbance Detection for Φ-OTDR Based on YOLO Algorithm

 ,
,  , and
, and
Abstract
:1. Introduction
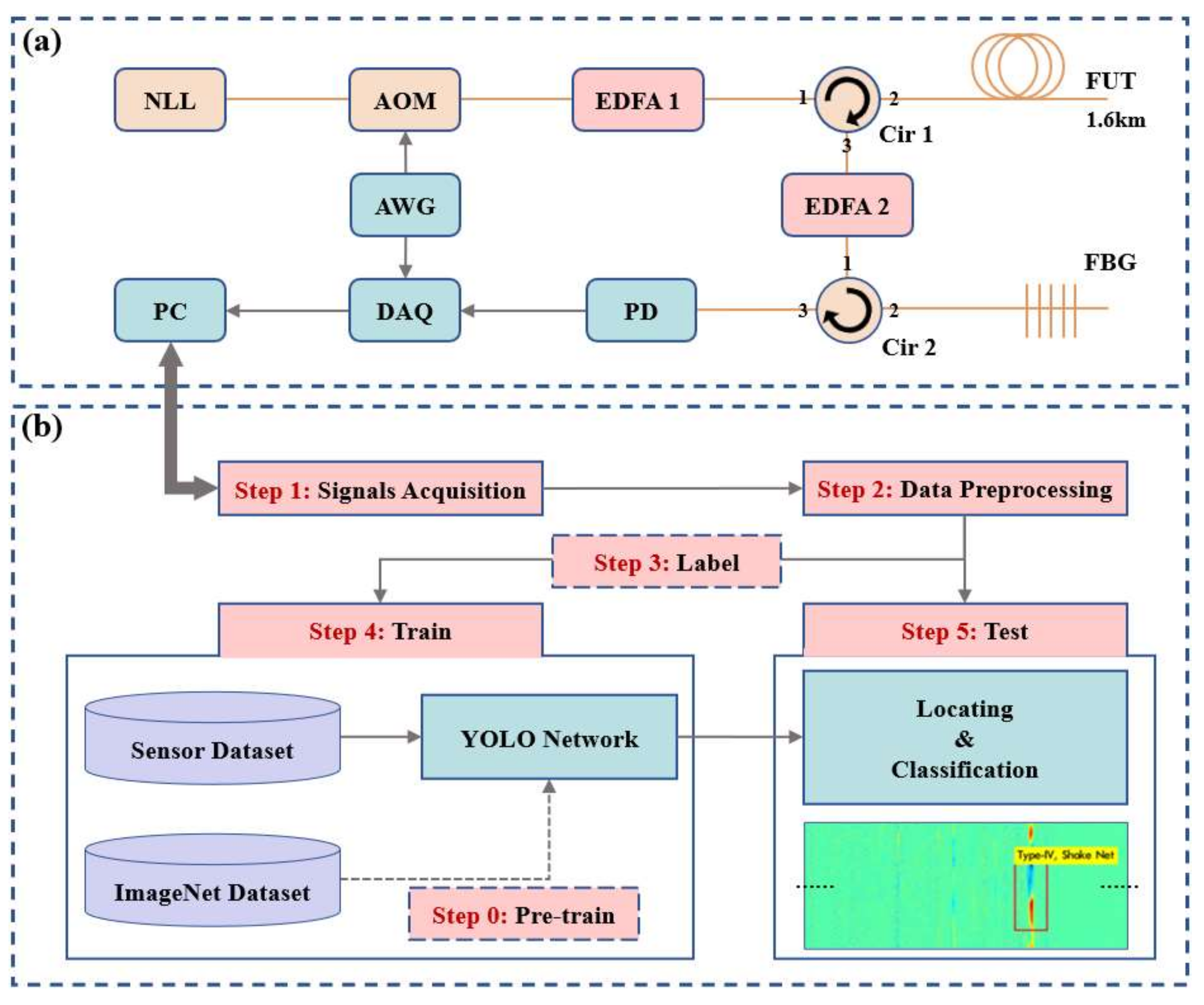
2. Principle of Operation
3. Experiment and Result
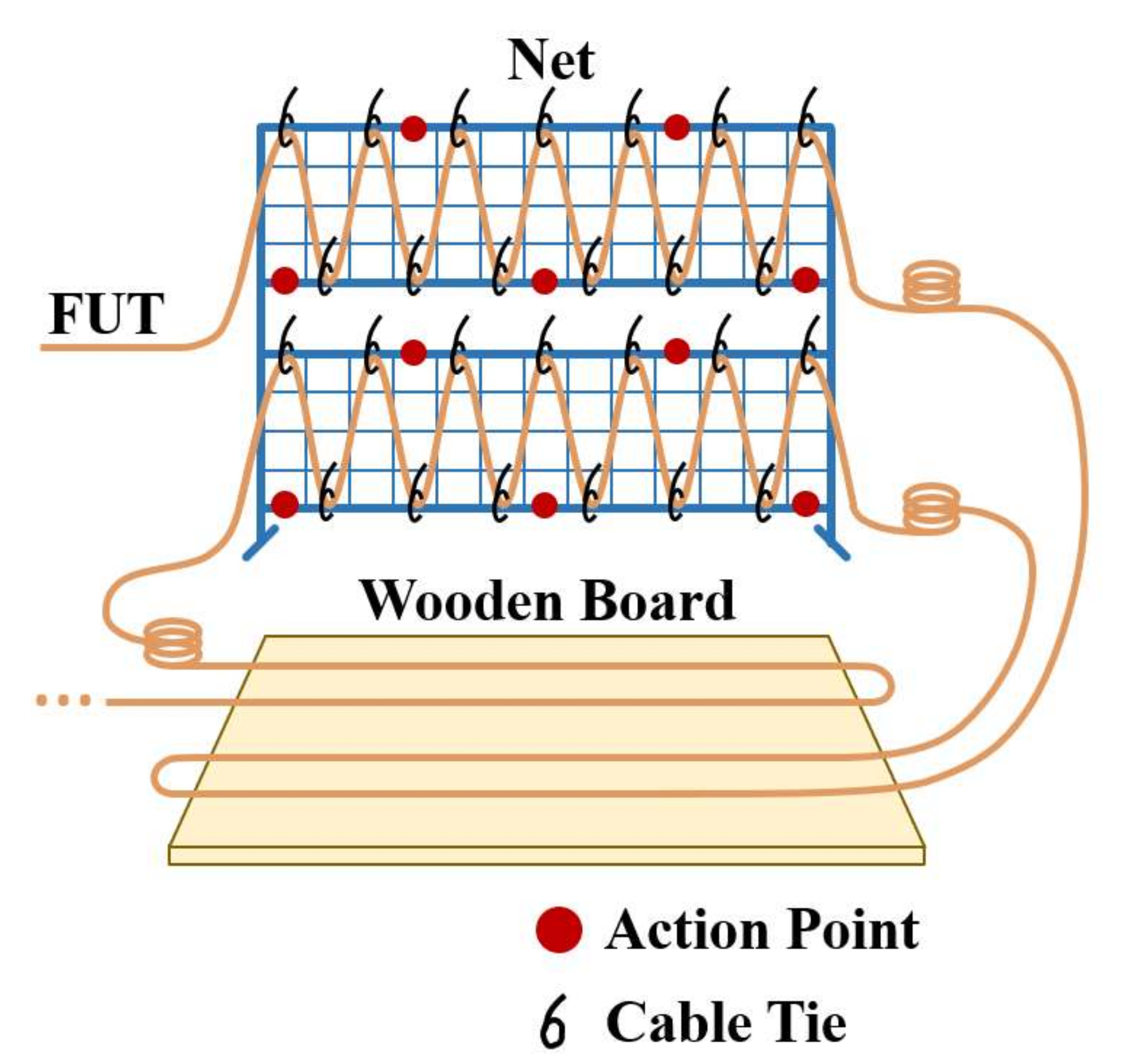
3.1. Distributed Optical Fiber Sensing System & Data Collection
- (I)
- Calm state
- (II)
- Rigid collisions against the ground
- (III)
- Hitting the protective net
- (IV)
- Shaking the protective net
- (V)
- Cutting the protective net
3.2. Data Pre-Processing
3.3. Comparison between YOLO and Traditional Detection Algorithms
- Locating
- 2.
- Classification
- 3.
- About (I) calm state
3.4. Real-Time Sensing Video Processing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Juarez, J.C.; Maier, E.W.; Kyoo Nam, C.; Taylor, H.F. Distributed fiber-optic intrusion sensor system. J. Lightwave Technol. 2005, 23, 2081–2087. [Google Scholar] [CrossRef]
- Liu, S.; Yu, F.; Hong, R.; Xu, W.; Shao, L.; Wang, F. Advances in phase-sensitive optical time-domain reflectometry. Opto-Electron. Adv. 2022, 200078. [Google Scholar] [CrossRef]
- Jousset, P.; Reinsch, T.; Ryberg, T.; Blanck, H.; Clarke, A.; Aghayev, R.; Hersir, G.P.; Henninges, J.; Weber, M.; Krawczyk, C.M. Dynamic strain determination using fibre-optic cables allows imaging of seismological and structural features. Nat. Commun. 2018, 9, 2509. [Google Scholar] [CrossRef] [PubMed]
- Lindsey Nathaniel, J.; Dawe, T.C.; Ajo-Franklin Jonathan, B. Illuminating seafloor faults and ocean dynamics with dark fiber distributed acoustic sensing. Science 2019, 366, 1103–1107. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Liu, Z.; Zhou, X.; Li, S.; Yuan, X.; Zhang, Y.; Shao, L.; Zhang, X. Oil and gas pipeline leakage recognition based on distributed vibration and temperature information fusion. Results Opt. 2021, 5, 100131. [Google Scholar] [CrossRef]
- Philipp, R.; René, E.; Katerina, K. Distributed acoustic sensing: Towards partial discharge monitoring. In Proceedings of the 24th International Conference on Optical Fibre Sensors, Curitiba, Brazil, 28 September 2015. [Google Scholar]
- Chen, Z.; Zhang, L.; Liu, H.; Peng, P.; Liu, Z.; Shen, S.; Chen, N.; Zheng, S.; Li, J.; Pang, F. 3D Printing Technique-Improved Phase-Sensitive OTDR for Breakdown Discharge Detection of Gas-Insulated Switchgear. Sensors 2020, 20, 1045. [Google Scholar] [CrossRef] [Green Version]
- Peng, F.; Duan, N.; Rao, Y.; Li, J. Real-Time Position and Speed Monitoring of Trains Using Phase-Sensitive OTDR. IEEE Photonics Technol. Lett. 2014, 26, 2055–2057. [Google Scholar] [CrossRef]
- Huang, M.F.; Salemi, M.; Chen, Y.; Zhao, J.; Xia, T.J.; Wellbrock, G.A.; Huang, Y.K.; Milione, G.; Ip, E.; Ji, P.; et al. First Field Trial of Distributed Fiber Optical Sensing and High-Speed Communication Over an Operational Telecom Network. J. Lightwave Technol. 2020, 38, 75–81. [Google Scholar] [CrossRef]
- Min, R.; Liu, Z.; Pereira, L.; Yang, C.; Sui, Q.; Marques, C. Optical fiber sensing for marine environment and marine structural health monitoring: A review. Opt. Laser Technol. 2021, 140, 107082. [Google Scholar] [CrossRef]
- Tejedor, J.; Macias-Guarasa, J.; Martins, H.F.; Pastor-Graells, J.; Martín-López, S.; Guillén, P.C.; Pauw, G.D.; Smet, F.D.; Postvoll, W.; Ahlen, C.H.; et al. Real Field Deployment of a Smart Fiber-Optic Surveillance System for Pipeline Integrity Threat Detection: Architectural Issues and Blind Field Test Results. J. Lightwave Technol. 2018, 36, 1052–1062. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, H.; Li, L.; Liang, J.; Wang, X.; Lu, B.; Ye, Q.; Qu, R.; Cai, H. Practical multi-class event classification approach for distributed vibration sensing using deep dual path network. Opt. Express 2019, 27, 23682–23692. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Shao, L.-Y.; Li, Z.; Zhang, Z.; Zou, X.; Luo, B.; Pan, W.; Yan, L. Self-Mixing Demodulation for Coherent Phase-Sensitive OTDR System. Sensors 2016, 16, 681. [Google Scholar] [CrossRef] [PubMed]
- He, H.; Shao, L.-Y.; Luo, B.; Li, Z.; Zou, X.; Zhang, Z.; Pan, W.; Yan, L. Multiple vibrations measurement using phase-sensitive OTDR merged with Mach-Zehnder interferometer based on frequency division multiplexing. Opt. Express 2016, 24, 4842–4855. [Google Scholar] [CrossRef] [PubMed]
- Shao, L.; Liu, S.; Bandyopadhyay, S.; Yu, F.; Xu, W.; Wang, C.; Li, H.; Vai, M.I.; Du, L.; Zhang, J. Data-Driven Distributed Optical Vibration Sensors: A Review. IEEE Sens. J. 2020, 20, 6224–6239. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, P.; Ding, K.; Li, H.; Zhang, J.; Liu, X.; Bai, Q.; Wang, D.; Jin, B. Pattern Recognition Using Relevant Vector Machine in Optical Fiber Vibration Sensing System. IEEE Access 2019, 7, 5886–5895. [Google Scholar] [CrossRef]
- Sun, Q.; Feng, H.; Yan, X.; Zeng, Z. Recognition of a Phase-Sensitivity OTDR Sensing System Based on Morphologic Feature Extraction. Sensors 2015, 15, 5179. [Google Scholar] [CrossRef] [Green Version]
- Wu, H.; Chen, J.; Liu, X.; Xiao, Y.; Wang, M.; Zheng, Y.; Rao, Y. One-Dimensional CNN-Based Intelligent Recognition of Vibrations in Pipeline Monitoring With DAS. J. Lightwave Technol. 2019, 37, 4359–4366. [Google Scholar] [CrossRef]
- Sha, Z.; Feng, H.; Rui, X.; Zeng, Z. PIG Tracking Utilizing Fiber Optic Distributed Vibration Sensor and YOLO. J. Lightwave Technol. 2021, 39, 4535–4541. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Shi, Y.; Li, Y.; Zhang, Y.; Zhuang, Z.; Jiang, T. An Easy Access Method for Event Recognition of Φ-OTDR Sensing System Based on Transfer Learning. J. Lightwave Technol. 2021, 39, 4548–4555. [Google Scholar] [CrossRef]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. ImageNet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Zhu, T.; Chen, L.; Bao, X. Distributed Vibration Sensor Based on Coherent Detection of Phase-OTDR. J. Lightwave Technol. 2010, 28, 3243–3249. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | I | II | III | IV | V |
|---|---|---|---|---|---|
| Calm State | Rigid Collision | Hit Net | Shake Net | Cut Net | |
| Train set size | 560 | 520 | 1352 | 1195 | 424 |
| Test set size | 240 | 223 | 580 | 512 | 181 |
| Total dataset size | 800 | 743 | 1932 | 1707 | 605 |
| Method | Accuracy (%) | Testing Time (sec/img) | Rate (FPS) |
|---|---|---|---|
| Fast R-CNN | 95.74% | 1.9665 | 0.5085 |
| Faster R-CNN | 97.29% | 0.1659 | 6.0277 |
| YOLO-based | 96.14% | 0.0438 | 22.8311 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, W.; Yu, F.; Liu, S.; Xiao, D.; Hu, J.; Zhao, F.; Lin, W.; Wang, G.; Shen, X.; Wang, W.; et al. Real-Time Multi-Class Disturbance Detection for Φ-OTDR Based on YOLO Algorithm. Sensors 2022, 22, 1994. https://0-doi-org.brum.beds.ac.uk/10.3390/s22051994
Xu W, Yu F, Liu S, Xiao D, Hu J, Zhao F, Lin W, Wang G, Shen X, Wang W, et al. Real-Time Multi-Class Disturbance Detection for Φ-OTDR Based on YOLO Algorithm. Sensors. 2022; 22(5):1994. https://0-doi-org.brum.beds.ac.uk/10.3390/s22051994
Chicago/Turabian StyleXu, Weijie, Feihong Yu, Shuaiqi Liu, Dongrui Xiao, Jie Hu, Fang Zhao, Weihao Lin, Guoqing Wang, Xingliang Shen, Weizhi Wang, and et al. 2022. "Real-Time Multi-Class Disturbance Detection for Φ-OTDR Based on YOLO Algorithm" Sensors 22, no. 5: 1994. https://0-doi-org.brum.beds.ac.uk/10.3390/s22051994