
Rain Discrimination with Machine Learning Classifiers for Opportunistic Rain Detection System Using Satellite Micro-Wave Links
 , ,
, ,  ,
,  and
and 
Abstract
:1. Introduction
2. Problem Definition
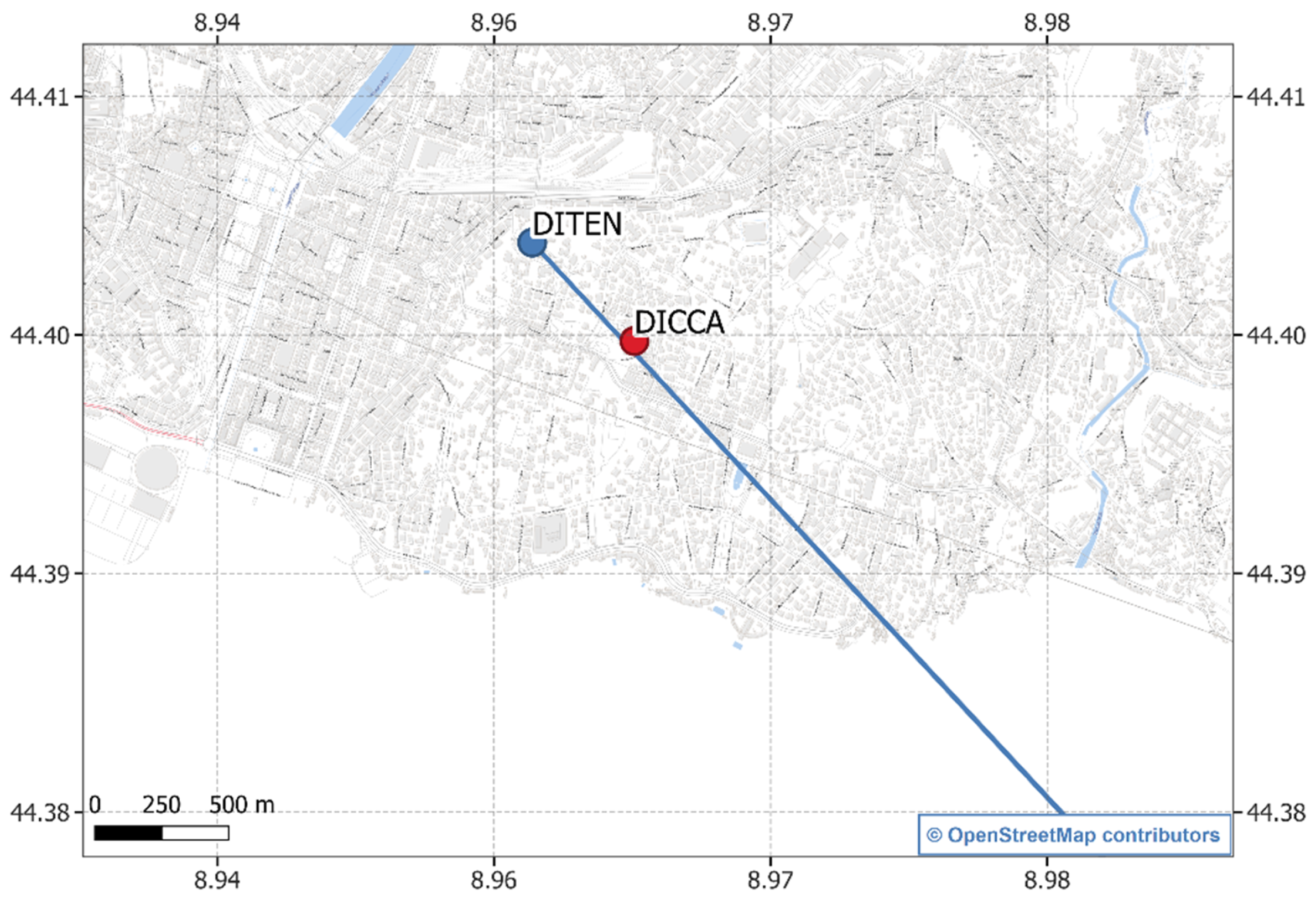
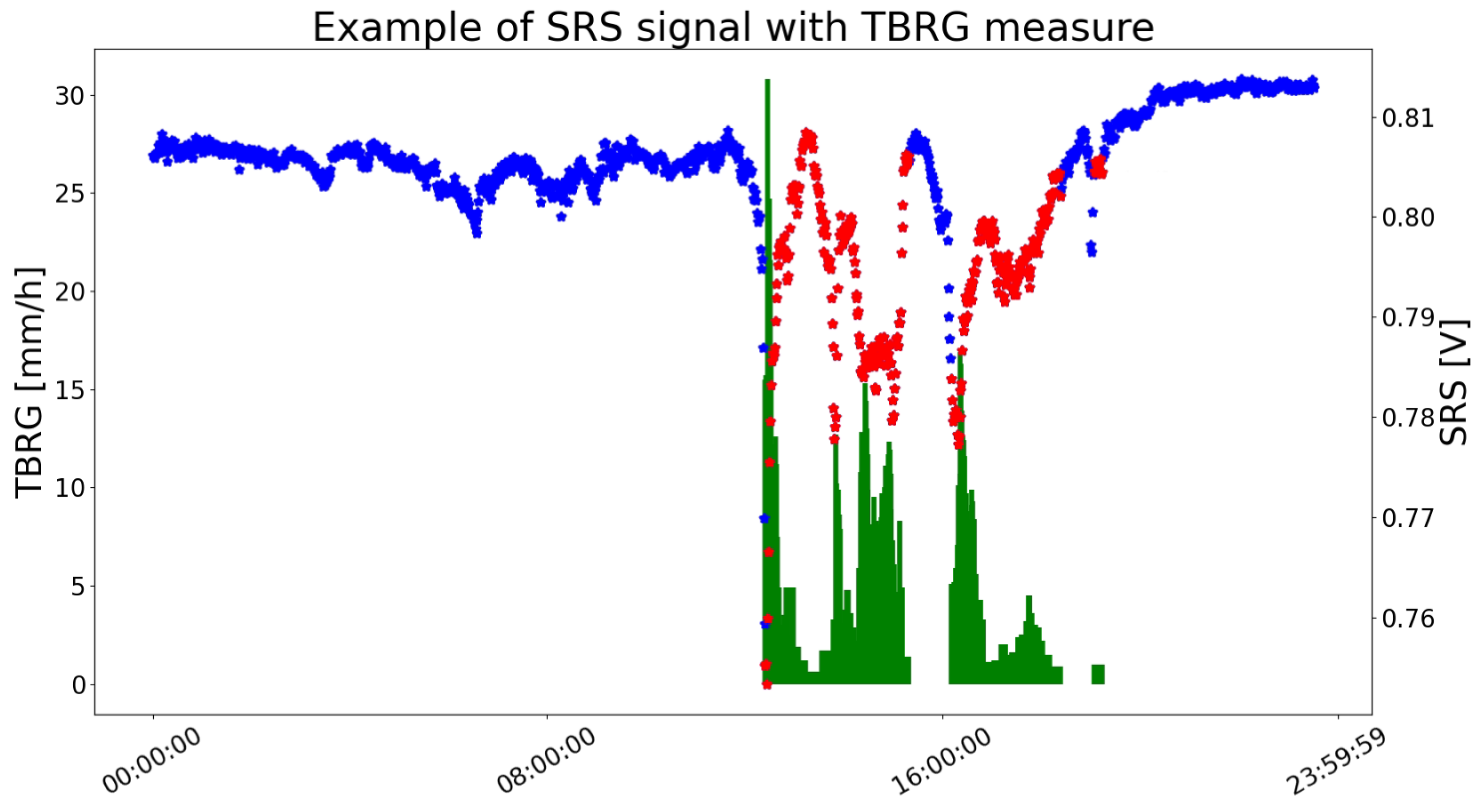
2.1. Data Collection
2.2. Event Selection
2.3. Description of the Feature Set
3. Methodology
3.1. Machine Learning Algorithms with Hyper-Parameters Selection
3.1.1. Decision Tree
- Maximum depth of the tree, where None means no limit.
- Minimum number of samples to split a node, .
- Number of samples to consider a node as a leaf, .
3.1.2. K-SVM
- The Kernel used is RBF.
- Standard deviation of the RBF kernels, .
- L2 Regularizer, .
3.1.3. Artificial Neural Network
- Number of neurons, .
- L2 Regularizer .
3.1.4. Random Forest
- Number of trees, .
- Maximum depth of the tree, where None means no limit.
- Minimum number of samples to split a node, .
- Number of samples to consider a node as a leaf, .
- Percentage of random training data to create a tree, .
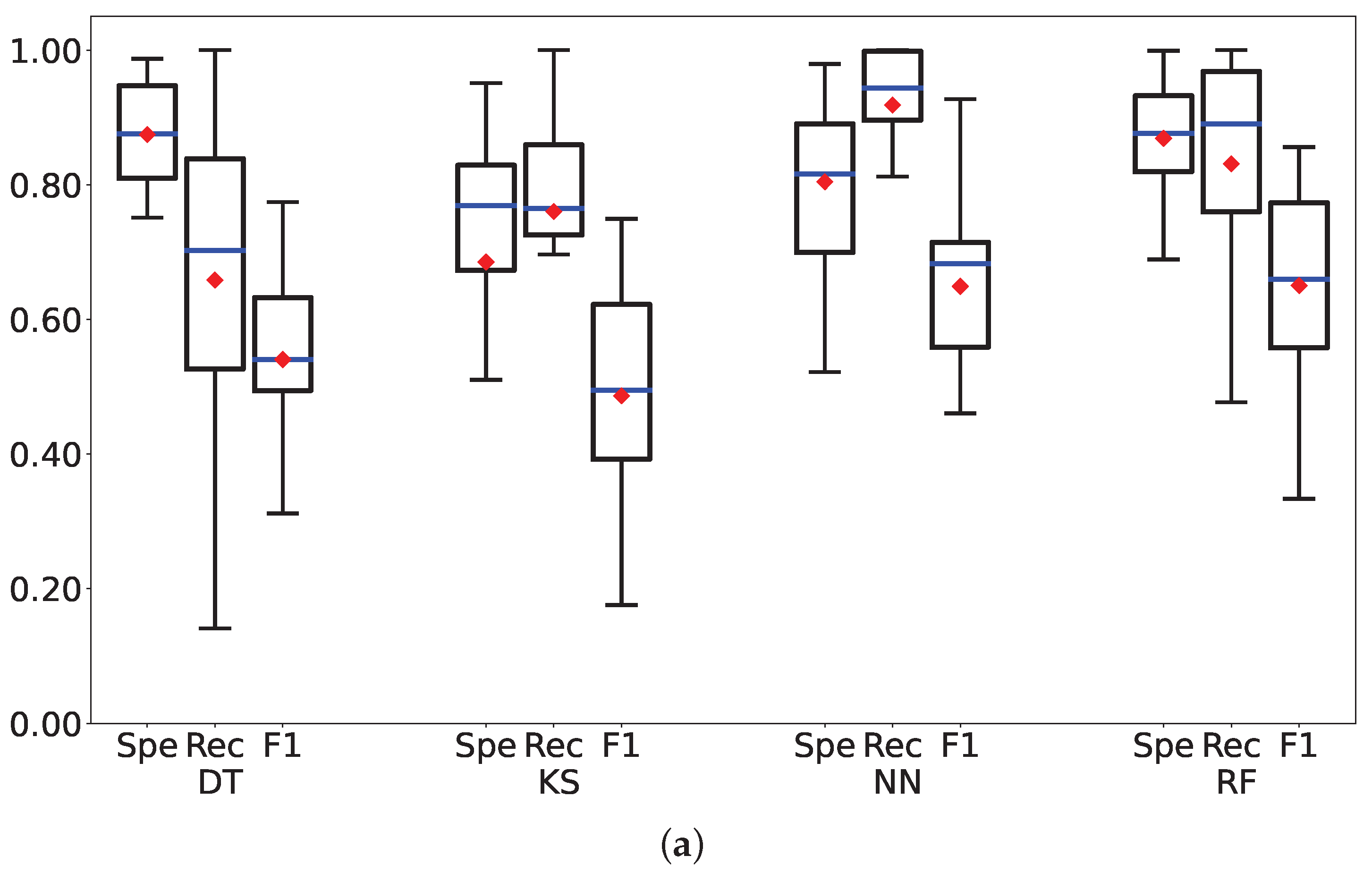
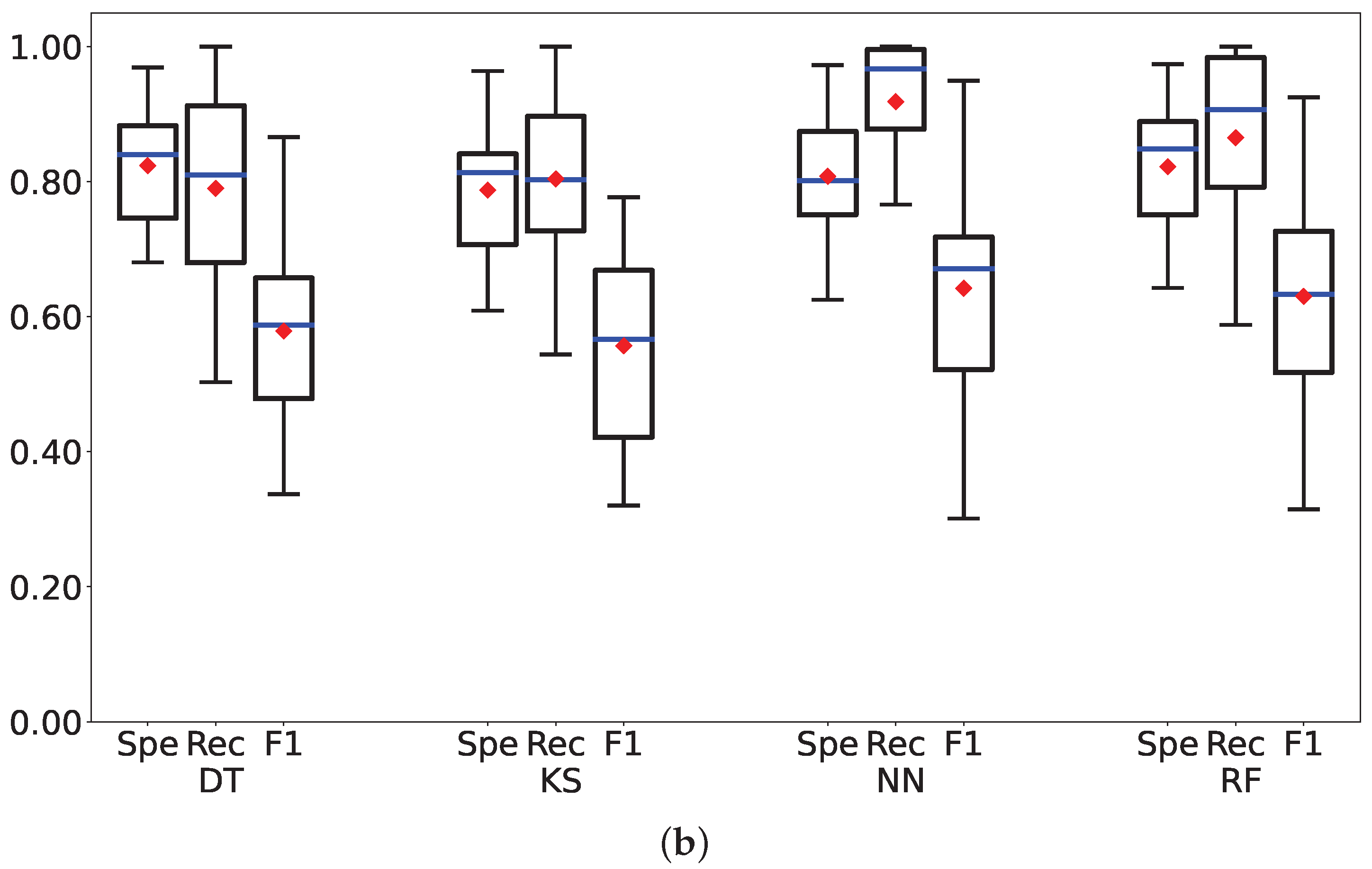
3.2. Performance Metrics
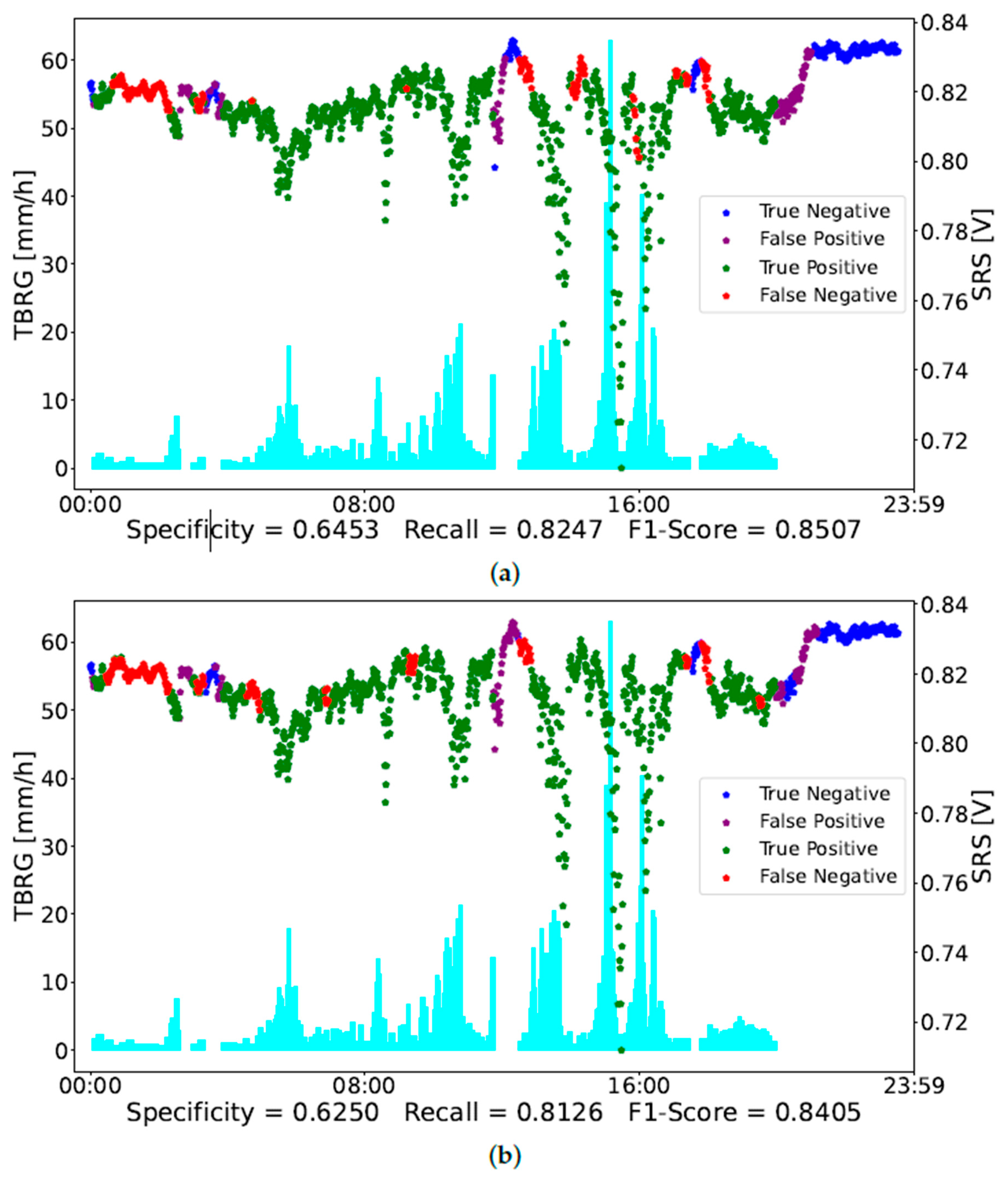
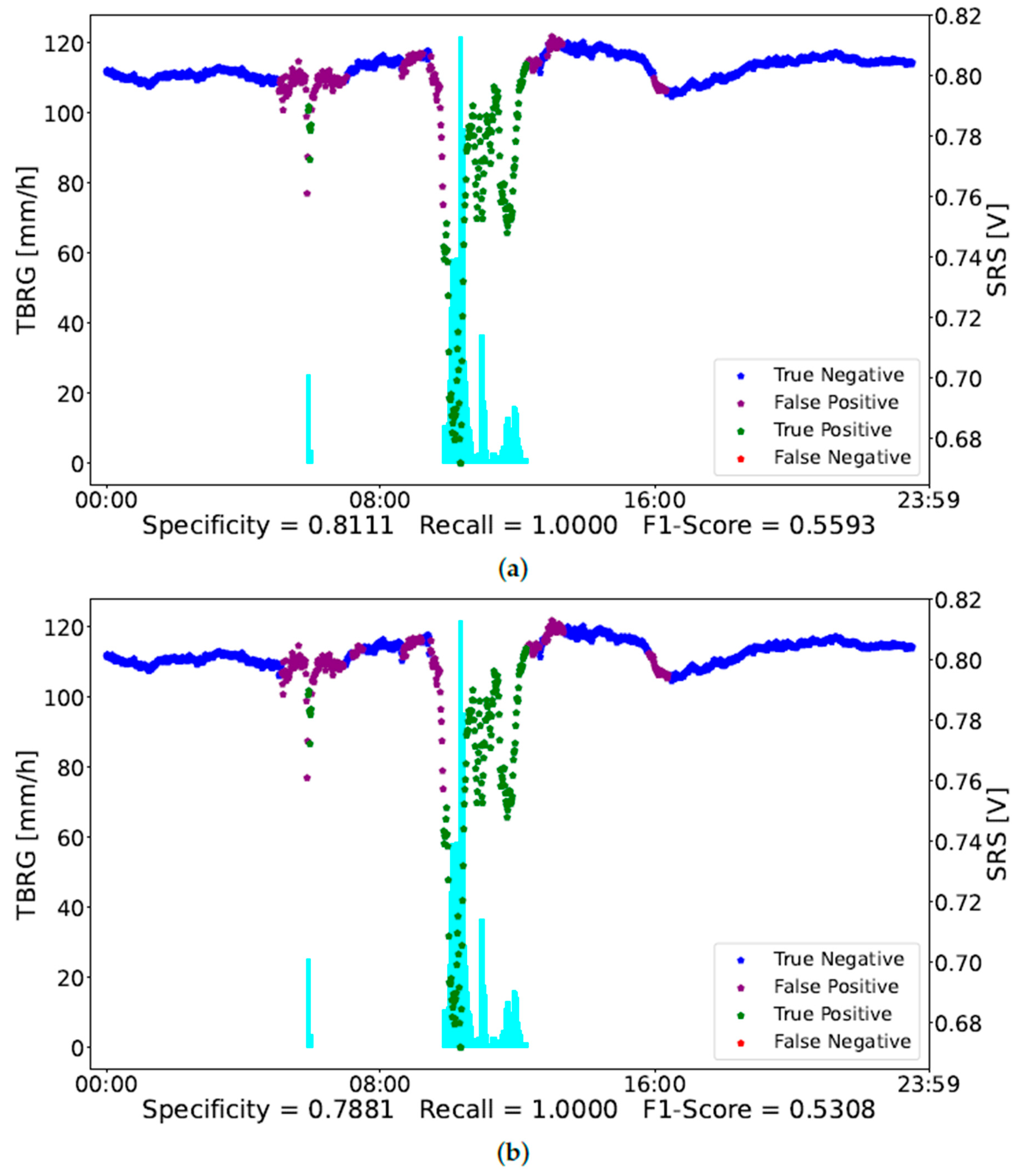
- Specificity is the ratio between the TN and all the negatives, indicating how good a classifier is in predicting non-rainy observations.
- Recall is the measure of our model correctly identifying TP. Thus, for all the samples that actually are rainy, recall tells us how many of them the classifier has correctly identified as rainy samples.
- F1-score represents the Harmonic mean of the precision and recall. The precision is the ratio between the TP and all the positives. For our problem statement, that would be the measure of samples that the classifier has correctly identified as rainy samples out of all the samples that have been predicted as rainy by the classifier.
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ricciardelli, E.; Cimini, D.; Di Paola, F.; Romano, F.; Viggiano, M. A statistical approach for rain intensity differentiation using Meteosat Second Generation–Spinning Enhanced Visible and InfraRed Imager observations. Hydrol. Earth Syst. Sci. 2014, 18, 2559–2576. [Google Scholar] [CrossRef] [Green Version]
- Adirosi, E.; Facheris, L.; Giannetti, F.; Scarfone, S.; Bacci, G.; Mazza, A.; Ortolani, A.; Baldini, L. Evaluation of rainfall estimation derived from commercial interactive DVB receivers using disdrometer, rain gauge, and weather radar. IEEE Trans. Geosci. Remote Sens. 2020, 59, 8978–8991. [Google Scholar] [CrossRef]
- McCabe, M.F.; Rodell, M.; Alsdorf, D.E.; Miralles, D.G.; Uijlenhoet, R.; Wagner, W.; Lucieer, A.; Houborg, R.; Verhoest, N.E.; Franz, T.E.; et al. The future of Earth observation in hydrology. Hydrol. Earth Syst. Sci. 2017, 21, 3879–3914. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Messer, H.; Zinevich, A.; Alpert, P. Environmental monitoring by wireless communication networks. Science 2006, 312, 713. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jiang, S.-T.; Gao, T.-C.; Liu, X.-C.; Lei, L.; Liu, Z.-T. Investigation of the inversion of rainfall field based on microwave links. Acta Phys. Sin. 2013, 62. [Google Scholar]
- Kun, S.; Gao, T.-C.; Liu, X.-C.; Min, Y.; Yang, X. Method and experiment of rainfall intensity inversion using a microwave link based on support vector machine. Acta Phys. Sin. 2015, 64. [Google Scholar]
- Gao, T.-C.; Kun, S.; Liu, X.-C.; Min, Y.; Lei, L.; Jiang, S.-T. Research on the method and experiment of path rainfall intensity inversion using a microwave link. Acta Phys. Sin. 2015, 64. [Google Scholar]
- Han, C.; Huo, J.; Gao, Q.; Su, G.; Wang, H. Rainfall monitoring based on next-generation millimeter-wave backhaul technologies in a dense urban environment. Remote Sens. 2020, 12, 1045. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Reggiannini, R. Opportunistic rain rate estimation from measurements of satellite downlink attenuation: A survey. Sensors 2021, 21, 5872. [Google Scholar] [CrossRef]
- Barthès, L.; Mallet, C. Rainfall measurement from the opportunistic use of an Earth–space link in the Ku band. Atmos. Meas. Tech. 2013, 6, 2181–2193. [Google Scholar] [CrossRef] [Green Version]
- Gharanjik, A.; Shankar, M.B.; Zimmer, F.; Ottersten, B. Centralized rainfall estimation using carrier to noise of satellite communication links. IEEE J. Sel. Areas Commun. 2018, 36, 1065–1073. [Google Scholar] [CrossRef] [Green Version]
- Xian, M.; Liu, X.; Yin, M.; Song, K.; Zhao, S.; Gao, T. Rainfall monitoring based on machine learning by earth-space link in the Ku band. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 3656–3668. [Google Scholar] [CrossRef]
- Ostrometzky, J.; Messer, H. Dynamic determination of the baseline level in microwave links for rain monitoring from minimum attenuation values. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 11, 24–33. [Google Scholar] [CrossRef]
- Giannetti, F.; Moretti, M.; Reggiannini, R.; Vaccaro, A. The NEFOCAST system for detection and estimation of rainfall fields by the opportunistic use of broadcast satellite signals. IEEE Aerosp. Electron. Syst. Mag. 2019, 34, 16–27. [Google Scholar] [CrossRef] [Green Version]
- Giro, R.A.; Luini, L.; Riva, C.G. Rainfall estimation from tropospheric attenuation affecting satellite links. Information 2019, 11, 11. [Google Scholar] [CrossRef] [Green Version]
- Giannetti, F.; Reggiannini, R.; Moretti, M.; Adirosi, E.; Baldini, L.; Facheris, L.; Antonini, A.; Melani, S.; Bacci, G.; Petrolino, A.; et al. Real-time rain rate evaluation via satellite downlink signal attenuation measurement. Sensors 2017, 17, 1864. [Google Scholar] [CrossRef]
- Adirosi, E.; Antonini, A.; Bacci, G.; Caparrini, F.; Facheris, L.; Giannetti, F.; Mazza, A.; Moretti, M.; Petrolino, A.; Reggiannini, R.; et al. NEFOCAST project for real-time precipitation estimation from Ku satellite links: Preliminary results of the validation field campaign. In Proceedings of the 2018 2nd URSI Atlantic Radio Science Meeting (AT-RASC), Gran Canaria, Spain, 28 May–1 June 2018; pp. 1–4. [Google Scholar]
- He, B.; Liu, X.; Hu, S.; Song, K.; Gao, T. Use of the C-band microwave link to distinguish between rainy and dry periods. Adv. Meteorol. 2019, 2019, 3428786. [Google Scholar] [CrossRef] [Green Version]
- Xian, M.; Liu, X.; Gao, T. An Improvement to Precipitation Inversion Model Using Oblique Earth–Space Link Based on the Melting Layer Attenuation. IEEE Trans. Geosci. Remote Sens. 2020, 59, 6451–6465. [Google Scholar] [CrossRef]
- Polz, J.; Chwala, C.; Graf, M.; Kunstmann, H. Rain event detection in commercial microwave link attenuation data using convolutional neural networks. Atmos. Meas. Tech. 2020, 13, 3835–3853. [Google Scholar] [CrossRef]
- Wang, Z.; Schleiss, M.; Jaffrain, J.; Berne, A.; Rieckermann, J. Using Markov switching models to infer dry and rainy periods from telecommunication microwave link signals. Atmos. Meas. Tech. 2012, 5, 1847–1859. [Google Scholar] [CrossRef] [Green Version]
- Chwala, C.; Gmeiner, A.; Qiu, W.; Hipp, S.; Nienaber, D.; Siart, U.; Eibert, T.; Pohl, M.; Seltmann, J.; Fritz, J.; et al. Precipitation observation using microwave backhaul links in the alpine and pre-alpine region of Southern Germany. Hydrol. Earth Syst. Sci. 2012, 16, 2647–2661. [Google Scholar] [CrossRef] [Green Version]
- Schleiss, M.; Berne, A. Identification of dry and rainy periods using telecommunication microwave links. IEEE Geosci. Remote Sens. Lett. 2010, 7, 611–615. [Google Scholar] [CrossRef]
- Colli, M.; Cassola, F.; Martina, F.; Trovatore, E.; Delucchi, A.; Maggiolo, S.; Caviglia, D.D. Rainfall fields monitoring based on satellite microwave down-links and traditional techniques in the city of Genoa. IEEE Trans. Geosci. Remote Sens. 2020, 58, 6266–6280. [Google Scholar] [CrossRef]
- Colli, M.; Stagnaro, M.; Caridi, A.; Lanza, L.G.; Randazzo, A.; Pastorino, M.; Caviglia, D.D.; Delucchi, A. A field assessment of a rain estimation system based on satellite-to-earth microwave links. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2864–2875. [Google Scholar] [CrossRef]
- Colli, M.; Stagnaro, M.; Caridi, A.; Lanza, L.G.; Randazzo, A.; Pastorino, M.; Caviglia, D.D.; Delucchi, A. A Field Experiment of Rainfall Intensity Estimation Based on the Analysis of Satellite-to-Earth Microwave Link Attenuation. In Proceedings of the 6th International Conference on Applications in Electronics Pervading Industry, Environment and Society (ApplePies), Pisa, Italy, 26–27 September 2018; pp. 137–144. [Google Scholar]
- Colli, M.; Lanza, L.; Chan, P. Co-located tipping-bucket and optical drop counter RI measurements and a simulated correction algorithm. Atmos. Res. 2013, 119, 3–12. [Google Scholar] [CrossRef]
- Vuerich, E.; Monesi, C.; Lanza, L.G.; Stagi, L.; Lanzinger, E. WMO Field Intercomparison of Rainfall Intensity Gauges; Volume WMO/TD-No. 1504; WMO: Geneva, Switzerland, 2009. [Google Scholar]
- Raju, V.G.; Lakshmi, K.P.; Jain, V.M.; Kalidindi, A.; Padma, V. Study the influence of normalization/transformation process on the accuracy of supervised classification. In Proceedings of the 2020 Third International Conference on Smart Systems and Inventive Technology (ICSSIT), Tirunelveli, India, 20–22 August 2020; pp. 729–735. [Google Scholar]
- Wong, T.T. Performance evaluation of classification algorithms by k-fold and leave-one-out cross validation. Pattern Recognit. 2015, 48, 2839–2846. [Google Scholar] [CrossRef]
- Kim, J. Iterated Grid Search Algorithm on Unimodal Criteria. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 1997. [Google Scholar]
- Quinlan, J.R. Induction of decision trees. Mach. Learn. 1986, 1, 81–106. [Google Scholar] [CrossRef]
- Boser, B.E.; Guyon, I.M.; Vapnik, V.N. A training algorithm for optimal margin classifiers. In Proceedings of the 5th Annual Workshop on Computational Learning Theory, Pittsburgh, PA, USA, 27–29 July 1992; pp. 144–152. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Event ID | Date | Max TBRG [mm] | Htot [mm/h] | Minutes of Rainfall |
|---|---|---|---|---|
| 1 | 3 May 2017 | 83.9 | 15.2 | 106 |
| 2 | 6 May 2017 | 30.8 | 24.4 | 319 |
| 3 | 11 July 2017 | 218 | 22.4 | 61 |
| 4 | 22 July 2017 | 111.3 | 32.4 | 99 |
| 5 | 9 September 2017 | 146.8 | 52.1 | 328 |
| 6 | 18 September 2017 | 111.4 | 19.4 | 262 |
| 7 | 4 November 2017 | 65.9 | 9.2 | 73 |
| 8 | 5 November 2017 | 139.5 | 47.4 | 386 |
| 9 | 25 November 2017 | 43.4 | 21.0 | 342 |
| 10 | 10 December 2017 | 12.7 | 17.6 | 393 |
| 11 | 11 December 2017 | 62.9 | 65.0 | 1081 |
| 12 | 25 December 2017 | 54.5 | 7.1 | 61 |
| 13 | 26 December 2017 | 26.7 | 15.1 | 259 |
| 14 | 27 December 2017 | 58.7 | 42.9 | 481 |
| 15 | 1 January 2018 | 50.5 | 32.4 | 369 |
| 16 | 27 January 2018 | 24.9 | 19.4 | 295 |
| 17 | 14 August 2018 | 121.7 | 35.5 | 151 |
| 18 | 4 April 2018 | 220.4 | 38.5 | 346 |
| Symbol | Time Window with Respect to the Given Moment | Feature |
|---|---|---|
| x1 | 30 min before | Average |
| x2 | 30 min before | Standard Deviation |
| x3 | 30 min before | Maximum |
| x4 | 30 min before | Minimum |
| x5 | 30 min before | Skewness |
| x6 | 30 min before | Kurtosis |
| x7 | 30 min before | Local Trend |
| x8 | 30 min before | Information Entropy |
| x9 | 30 min before | Ratio of Singular Values |
| x10 | 30 min before | Ratio of High Frequency Energy to Low |
| x11 | none | Probability higher than Standard Deviation |
| x12 | none | Probability higher than Average |
| ID | Specificity | Recall | F1-Score | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DT | KS | NN | RF | DT | KS | NN | RF | DT | KS | NN | RF | |
| 1 | 0.87 | 0.90 | 0.89 | 0.92 | 0.84 | 0.72 | 0.97 | 1.0 | 0.49 | 0.48 | 0.58 | 0.67 |
| 2 | 0.91 | 0.92 | 0.89 | 0.94 | 0.70 | 0.76 | 1.0 | 0.91 | 0.70 | 0.75 | 0.84 | 0.86 |
| 3 | 0.97 | 0.95 | 0.92 | 0.90 | 1.0 | 0.77 | 0.97 | 1.0 | 0.73 | 0.54 | 0.51 | 0.49 |
| 4 | 0.89 | 0.51 | 0.89 | 0.90 | 1.0 | 1.0 | 0.96 | 1.0 | 0.49 | 0.18 | 0.46 | 0.51 |
| 5 | 0.96 | 0.67 | 0.52 | 0.87 | 0.40 | 0.78 | 1.0 | 0.80 | 0.52 | 0.54 | 0.56 | 0.71 |
| 6 | 0.77 | 0.80 | 0.79 | 0.77 | 0.93 | 0.86 | 1.0 | 0.98 | 0.63 | 0.63 | 0.69 | 0.66 |
| 7 | 0.86 | 0.83 | 0.64 | 0.82 | 0.29 | 0.85 | 1.0 | 0.88 | 0.15 | 0.34 | 0.23 | 0.33 |
| 8 | 0.87 | 0.82 | 0.72 | 0.85 | 0.62 | 0.76 | 0.92 | 0.69 | 0.63 | 0.68 | 0.69 | 0.66 |
| 9 | 0.75 | 0.70 | 0.66 | 0.76 | 0.60 | 0.47 | 0.89 | 0.75 | 0.50 | 0.39 | 0.60 | 0.60 |
| 10 | 0.99 | 0.68 | 0.98 | 1.0 | 0.19 | 0.28 | 0.57 | 0.29 | 0.31 | 0.26 | 0.70 | 0.45 |
| 11 | 0.77 | 0.74 | 0.65 | 0.69 | 0.61 | 0.52 | 0.82 | 0.77 | 0.73 | 0.65 | 0.85 | 0.82 |
| 12 | 0.96 | 0.92 | 0.97 | 0.97 | 0.84 | 0.90 | 0.85 | 0.89 | 0.63 | 0.48 | 0.68 | 0.70 |
| 13 | 0.80 | 0.70 | 0.69 | 0.71 | 0.73 | 0.82 | 0.92 | 0.90 | 0.54 | 0.51 | 0.55 | 0.55 |
| 14 | 0.89 | 0.81 | 0.87 | 0.86 | 0.77 | 0.75 | 0.93 | 0.93 | 0.77 | 0.70 | 0.84 | 0.84 |
| 15 | 0.97 | 0.29 | 0.97 | 0.98 | 0.14 | 0.75 | 0.93 | 0.76 | 0.23 | 0.40 | 0.93 | 0.84 |
| 16 | 0.85 | 0.29 | 0.80 | 0.89 | 0.71 | 1.0 | 0.99 | 0.94 | 0.62 | 0.43 | 0.72 | 0.79 |
| 17 | 0.77 | 0.00 | 0.81 | 0.83 | 0.99 | 1.0 | 1.0 | 1.0 | 0.51 | 0.19 | 0.56 | 0.59 |
| 18 | 0.88 | 0.80 | 0.82 | 0.99 | 0.50 | 0.70 | 0.81 | 0.48 | 0.54 | 0.60 | 0.69 | 0.63 |
| Avg | 0.87 | 0.69 | 0.80 | 0.87 | 0.66 | 0.76 | 0.92 | 0.83 | 0.54 | 0.49 | 0.65 | 0.65 |
| Std | 0.08 | 0.26 | 0.13 | 0.09 | 0.27 | 0.19 | 0.11 | 0.19 | 0.17 | 0.17 | 0.17 | 0.15 |
| ID | Specificity | Recall | F1-Score | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DT | KS | NN | RF | DT | KS | NN | RF | DT | KS | NN | RF | |
| 1 | 0.87 | 0.82 | 0.85 | 0.89 | 0.93 | 0.86 | 0.98 | 0.99 | 0.52 | 0.42 | 0.51 | 0.59 |
| 2 | 0.87 | 0.84 | 0.92 | 0.88 | 0.83 | 0.79 | 0.94 | 0.86 | 0.73 | 0.67 | 0.84 | 0.76 |
| 3 | 0.88 | 0.86 | 0.87 | 0.92 | 0.93 | 10.0 | 10.0 | 10.0 | 0.42 | 0.40 | 0.41 | 0.52 |
| 4 | 0.84 | 0.84 | 0.88 | 0.87 | 10.0 | 10.0 | 10.0 | 10.0 | 0.39 | 0.39 | 0.46 | 0.45 |
| 5 | 0.68 | 0.64 | 0.71 | 0.69 | 0.85 | 0.84 | 0.99 | 0.96 | 0.58 | 0.55 | 0.67 | 0.65 |
| 6 | 0.79 | 0.80 | 0.78 | 0.78 | 0.80 | 0.77 | 10.0 | 0.89 | 0.59 | 0.58 | 0.67 | 0.62 |
| 7 | 0.79 | 0.78 | 0.75 | 0.76 | 10.0 | 0.95 | 10.0 | 10.0 | 0.34 | 0.32 | 0.30 | 0.31 |
| 8 | 0.79 | 0.75 | 0.76 | 0.80 | 0.75 | 0.76 | 0.90 | 0.77 | 0.65 | 0.63 | 0.71 | 0.67 |
| 9 | 0.69 | 0.69 | 0.67 | 0.69 | 0.61 | 0.54 | 0.78 | 0.63 | 0.47 | 0.43 | 0.56 | 0.48 |
| 10 | 0.95 | 0.92 | 0.91 | 0.93 | 0.56 | 0.65 | 0.63 | 0.59 | 0.66 | 0.70 | 0.68 | 0.67 |
| 11 | 0.73 | 0.66 | 0.63 | 0.64 | 0.61 | 0.68 | 0.81 | 0.72 | 0.72 | 0.76 | 0.84 | 0.78 |
| 12 | 0.97 | 0.96 | 0.97 | 0.97 | 0.74 | 0.90 | 0.87 | 0.92 | 0.61 | 0.67 | 0.70 | 0.74 |
| 13 | 0.73 | 0.65 | 0.65 | 0.66 | 0.82 | 0.82 | 0.92 | 0.90 | 0.53 | 0.47 | 0.52 | 0.52 |
| 14 | 0.88 | 0.81 | 0.85 | 0.88 | 0.79 | 0.88 | 0.95 | 0.92 | 0.78 | 0.78 | 0.85 | 0.85 |
| 15 | 0.96 | 0.86 | 0.96 | 0.97 | 0.85 | 0.72 | 0.99 | 0.93 | 0.87 | 0.68 | 0.95 | 0.92 |
| 16 | 0.88 | 0.84 | 0.80 | 0.83 | 0.66 | 0.76 | 0.99 | 0.87 | 0.62 | 0.65 | 0.72 | 0.70 |
| 17 | 0.69 | 0.61 | 0.79 | 0.75 | 0.99 | 10.0 | 10.0 | 10.0 | 0.43 | 0.38 | 0.53 | 0.49 |
| 18 | 0.84 | 0.83 | 0.80 | 0.86 | 0.50 | 0.57 | 0.77 | 0.63 | 0.51 | 0.55 | 0.65 | 0.62 |
| Avg | 0.82 | 0.79 | 0.81 | 0.82 | 0.79 | 0.80 | 0.92 | 0.87 | 0.58 | 0.56 | 0.64 | 0.63 |
| Std | 0.09 | 0.10 | 0.10 | 0.10 | 0.15 | 0.14 | 0.11 | 0.14 | 0.14 | 0.14 | 0.11 | 0.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gianoglio, C.; Alyosef, A.; Colli, M.; Zani, S.; Caviglia, D.D. Rain Discrimination with Machine Learning Classifiers for Opportunistic Rain Detection System Using Satellite Micro-Wave Links. Sensors 2023, 23, 1202. https://0-doi-org.brum.beds.ac.uk/10.3390/s23031202
Gianoglio C, Alyosef A, Colli M, Zani S, Caviglia DD. Rain Discrimination with Machine Learning Classifiers for Opportunistic Rain Detection System Using Satellite Micro-Wave Links. Sensors. 2023; 23(3):1202. https://0-doi-org.brum.beds.ac.uk/10.3390/s23031202
Chicago/Turabian StyleGianoglio, Christian, Ayham Alyosef, Matteo Colli, Sara Zani, and Daniele D. Caviglia. 2023. "Rain Discrimination with Machine Learning Classifiers for Opportunistic Rain Detection System Using Satellite Micro-Wave Links" Sensors 23, no. 3: 1202. https://0-doi-org.brum.beds.ac.uk/10.3390/s23031202