
Minimum-Time Trajectory Generation for Wheeled Mobile Systems Using Bézier Curves with Constraints on Velocity, Acceleration and Jerk


Abstract
:1. Introduction
2. Related Work
3. Problem Formulation
4. Contributions
- We describe an innovative construction method for 5th order Bézier curves. The proposed parameterization is simple and intuitive, yet effective for generating smooth paths consisting of multiple splines (Section 5);
- The above smooth path generation basis is coupled with an algorithm that computes a minimum-time velocity profile with velocity, acceleration, and jerk constraints on a predefined path (see Ref. [5]). Together they form a powerful trajectory generation algorithm (Section 6). The resulting trajectories thus provide continuous velocity and acceleration profiles;
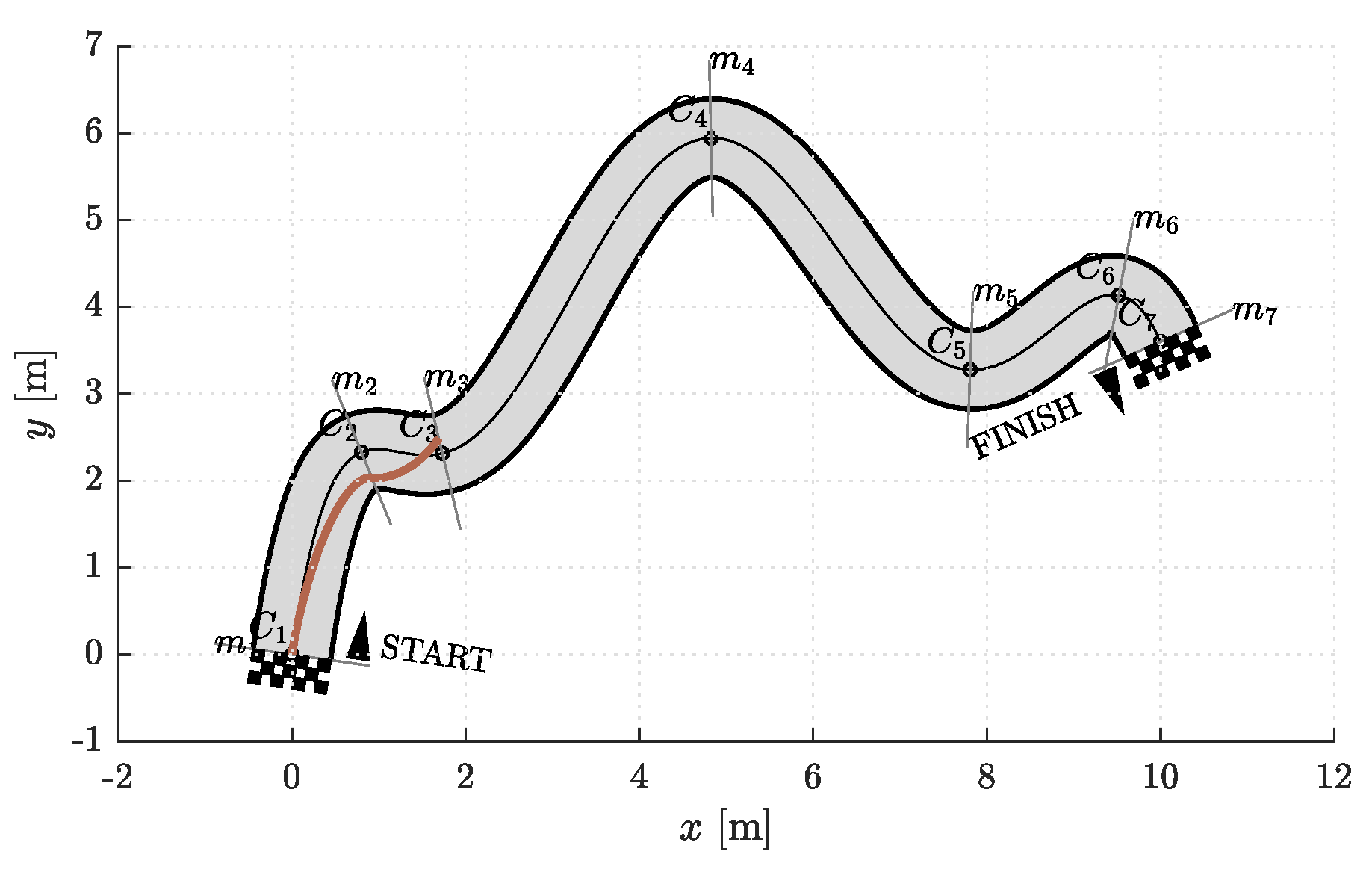
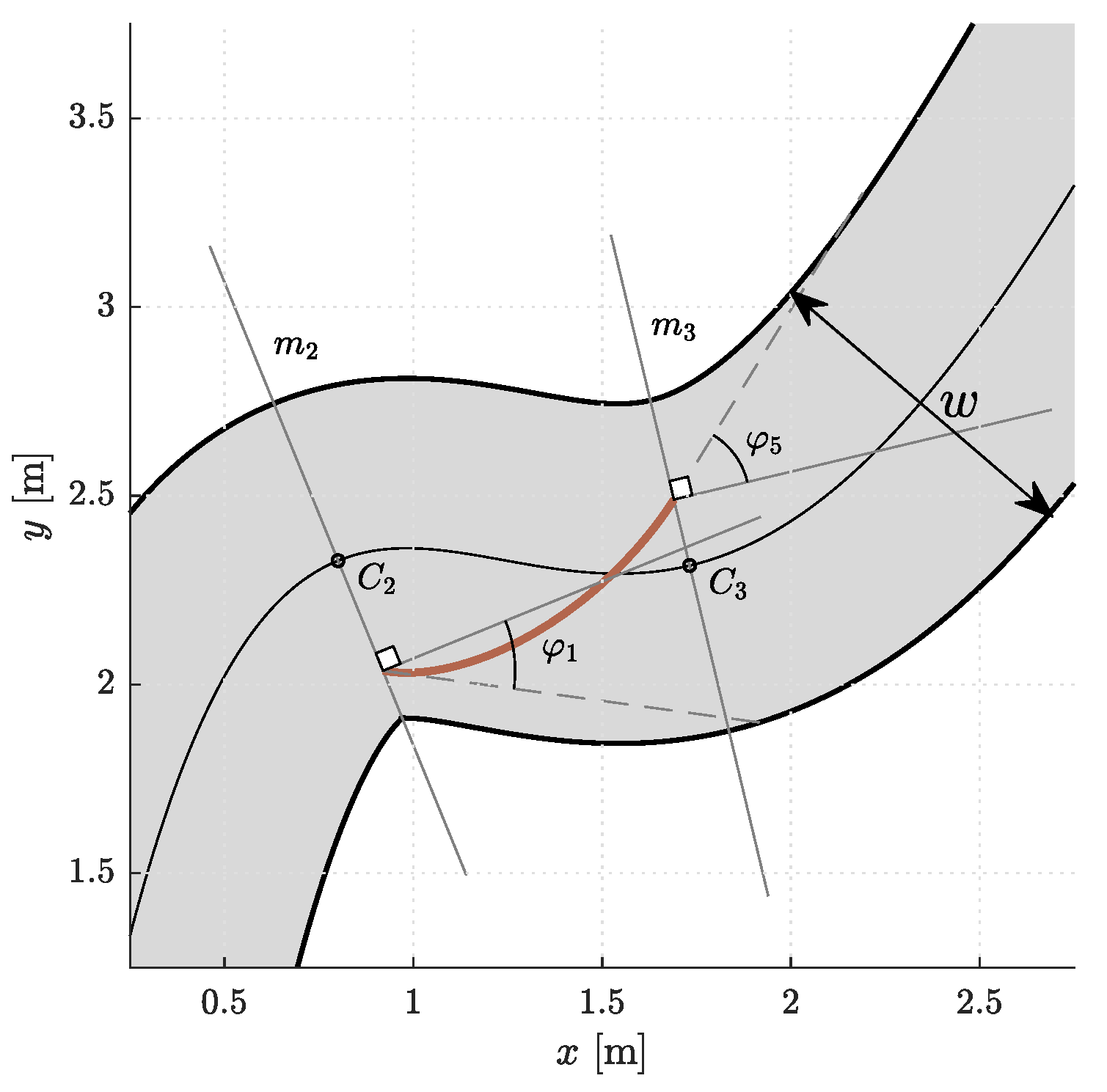
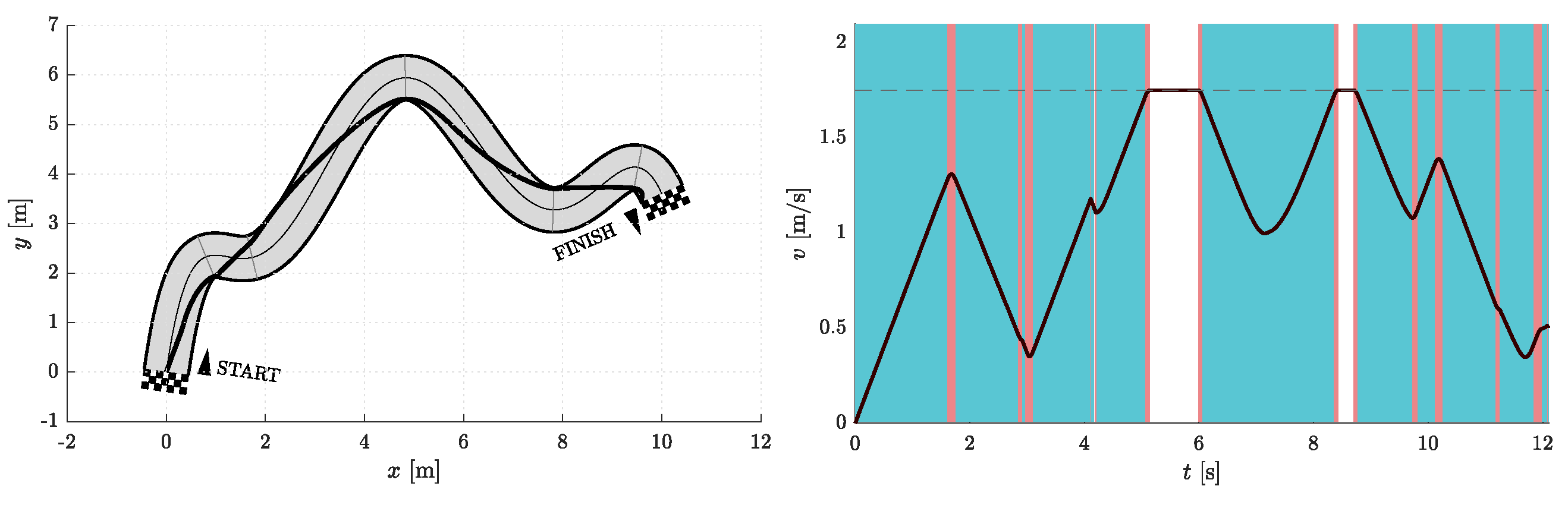
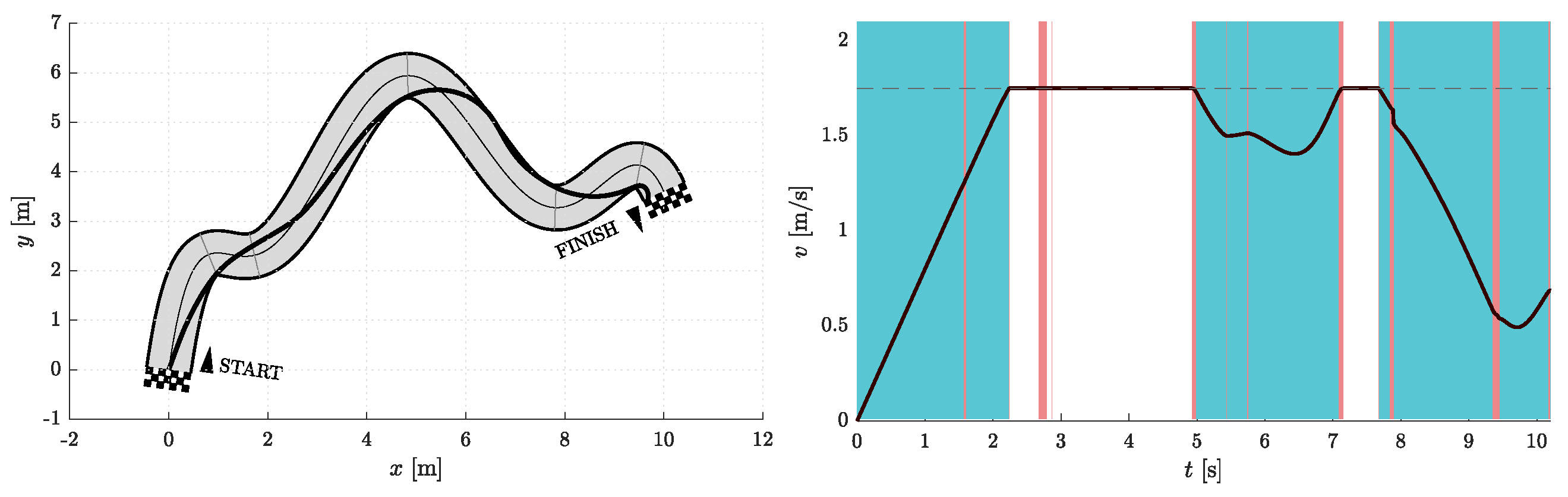
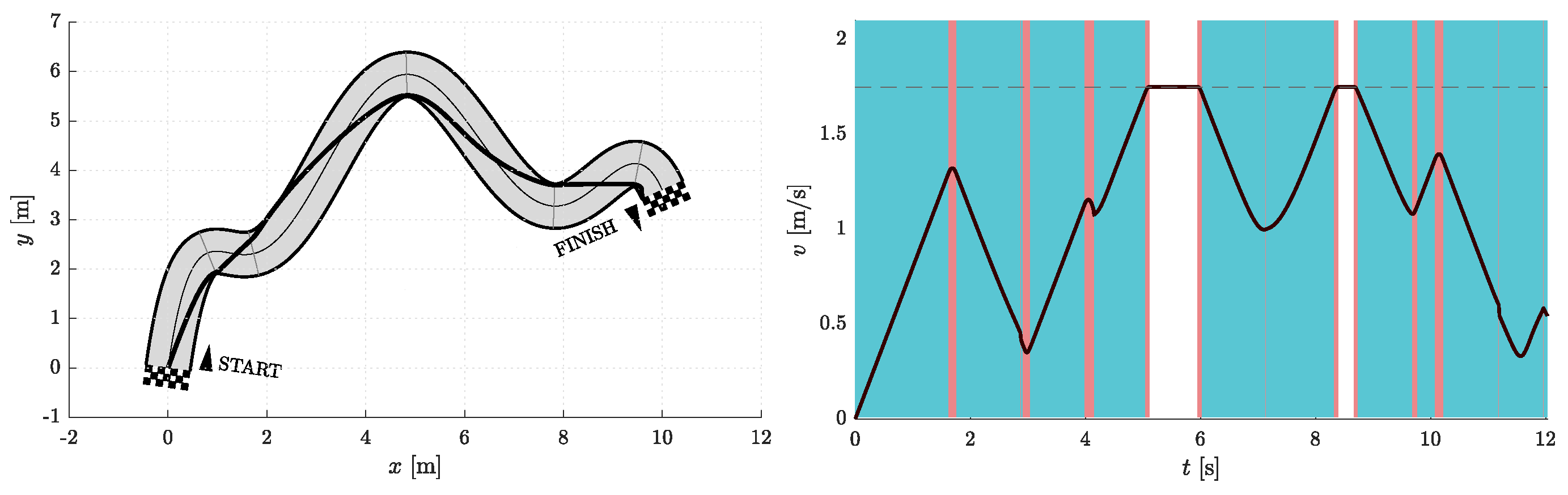
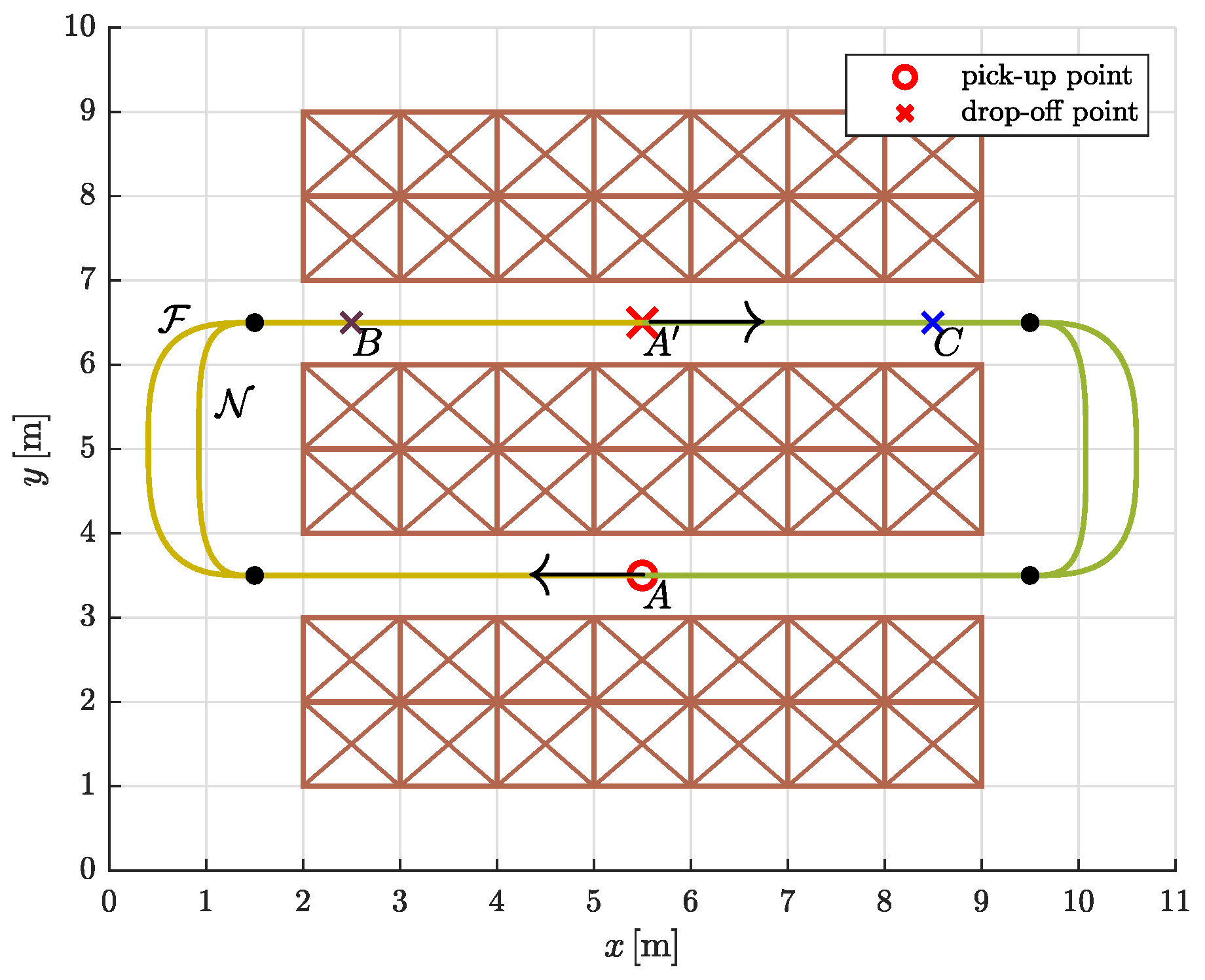
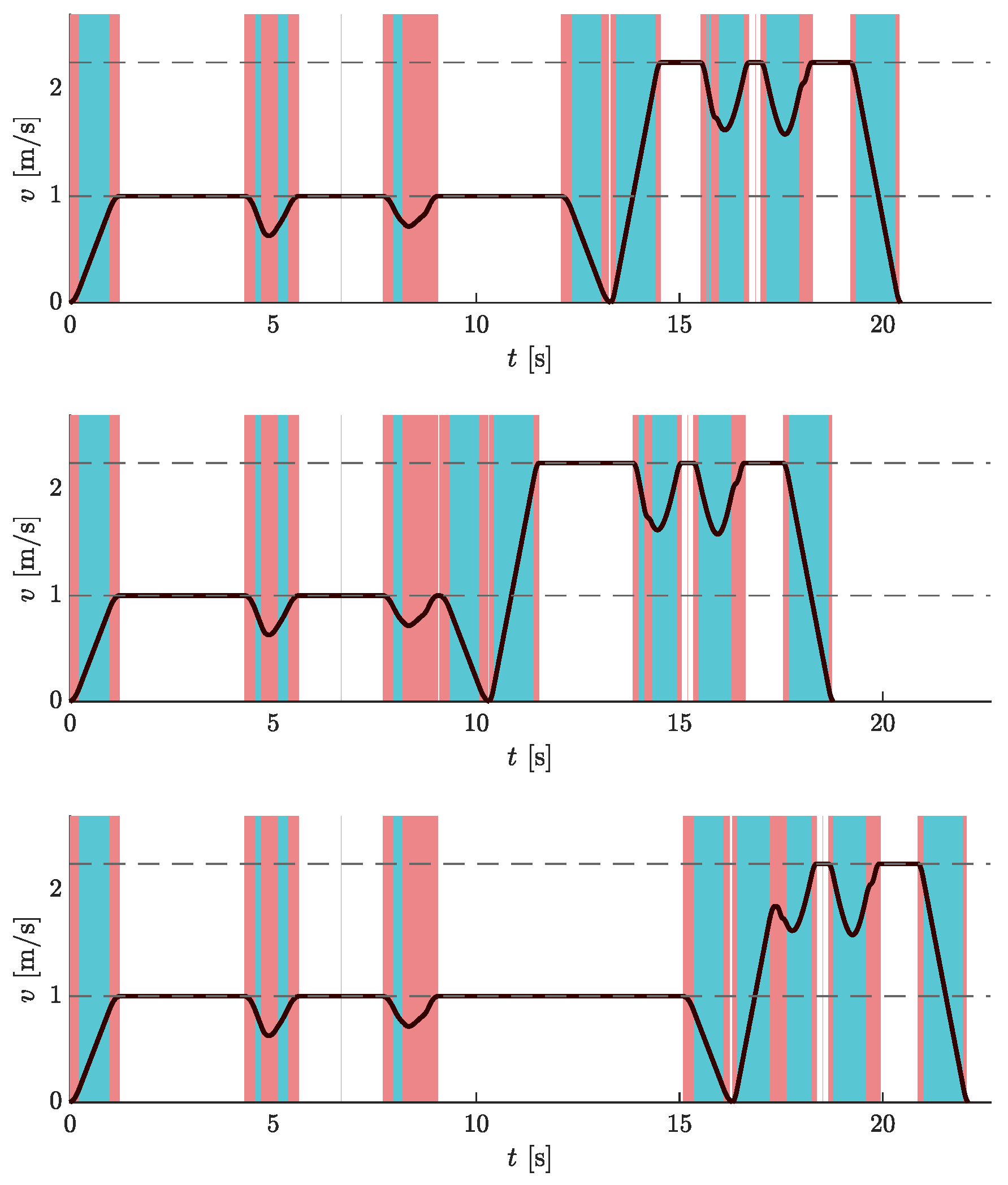
- To prove the applicability of our approach to trajectory optimization, we performed simulation experiments on a racetrack and in a warehouse environment (Section 6.1 and Section 6.2). In the warehouse simulation, we identified and analyzed realistic situations with different dynamic constraints to investigate and propose the most appropriate driving scenarios.
5. Curve Primitives
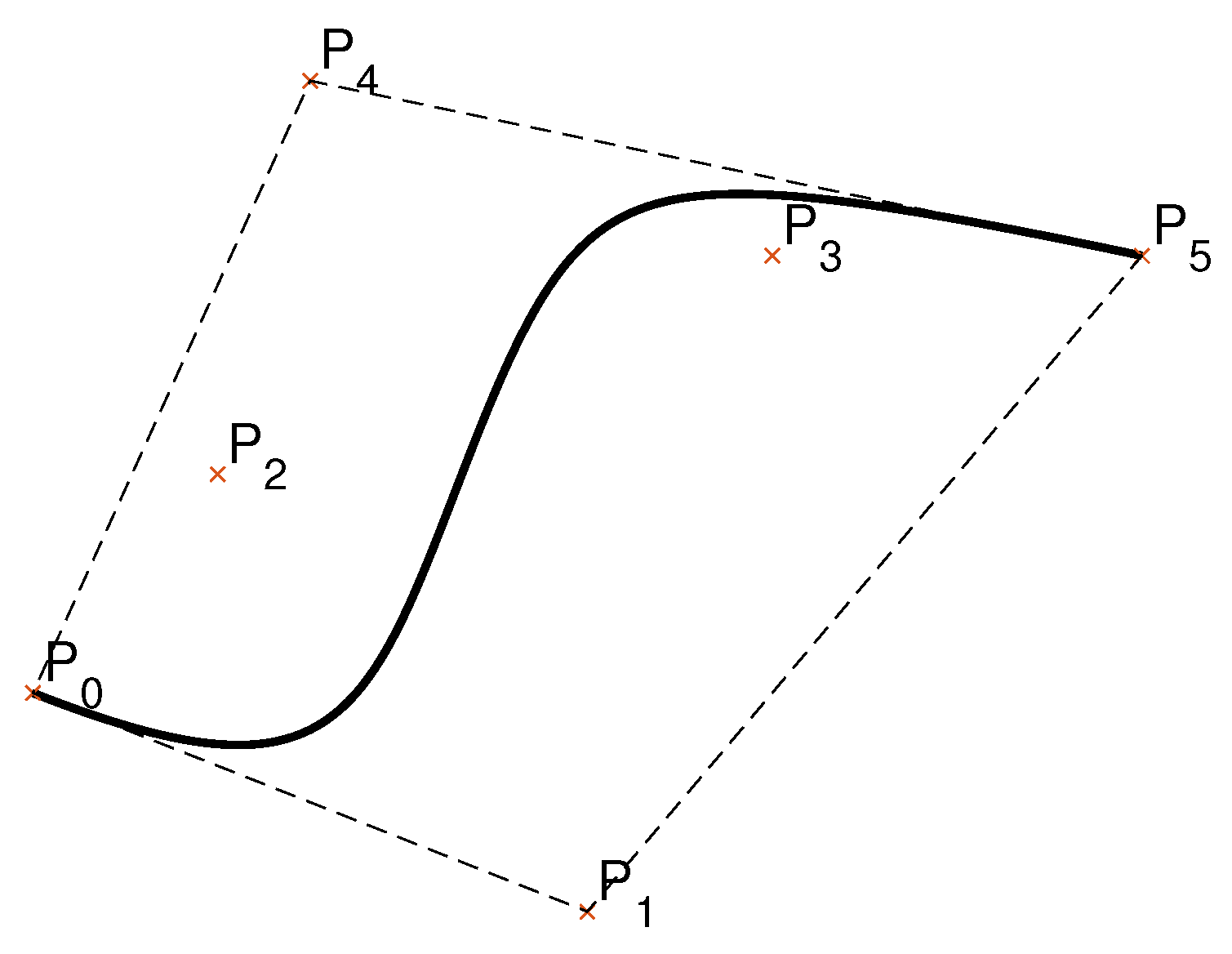
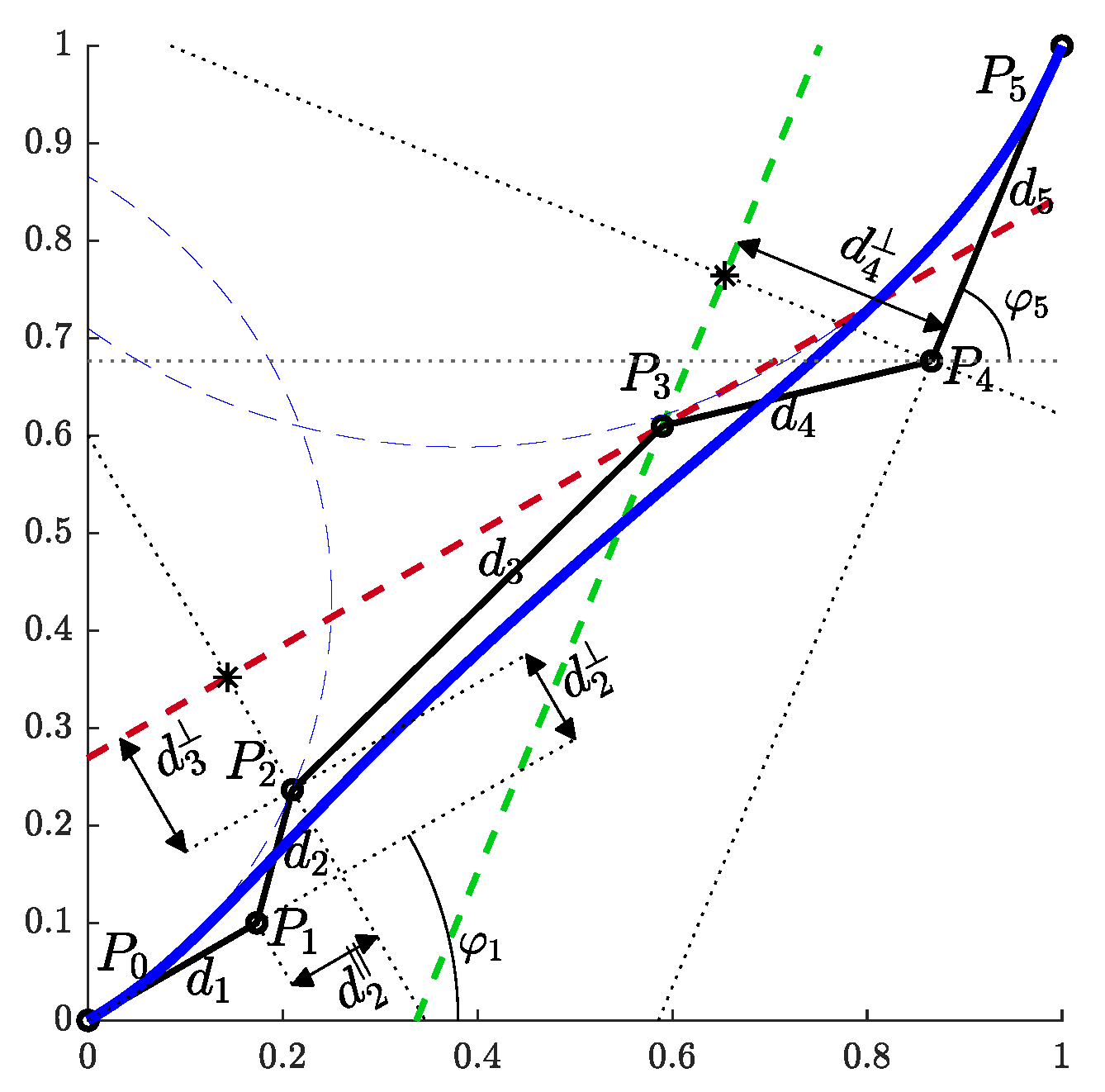
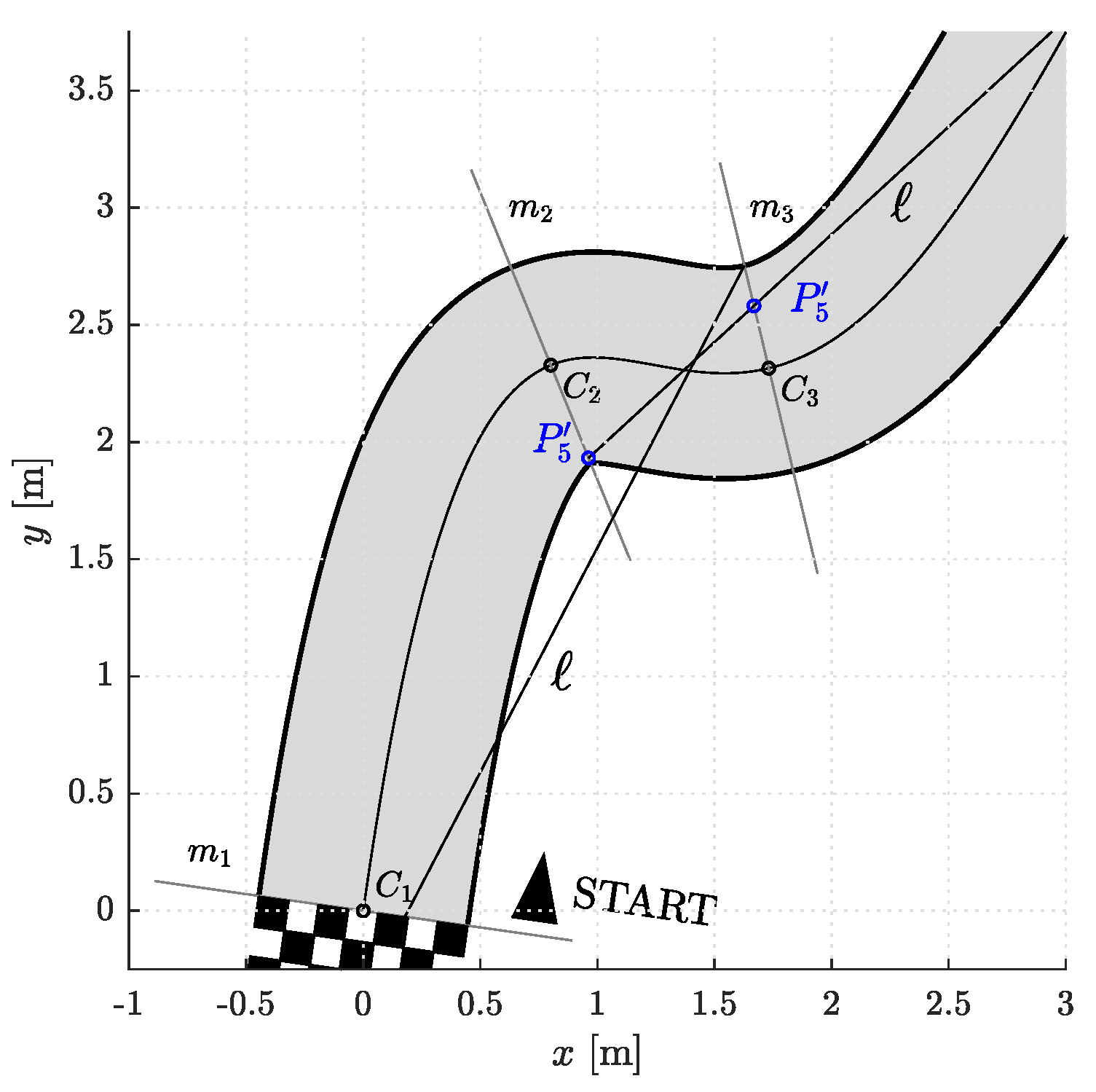
5.1. Construction of 5th Order Bézier Curves
- (1)
- Outline the first control point and mark it as . In the direction of , measure out the distance and mark the second point as .
- (2)
- In the direction , measure out the distance (from Equation (12)):
- (3)
- Measure in the perpendicular direction the distance (from Equation (10)):and mark the third point as .
- (4)
- All points away from for (Equation (11)) in the same direction (perpendicular to the line segment ) lie on the red dashed line.
- (5)
- Mark the last point as . Measure out the distance in the opposite direction from and mark the fifth point as .
- (6)
- (7)
- The fourth control point lies on the intersection of the red and green dashed lines. The Bézier curve is now completely defined.
6. Generation of Minimum-Time Trajectories
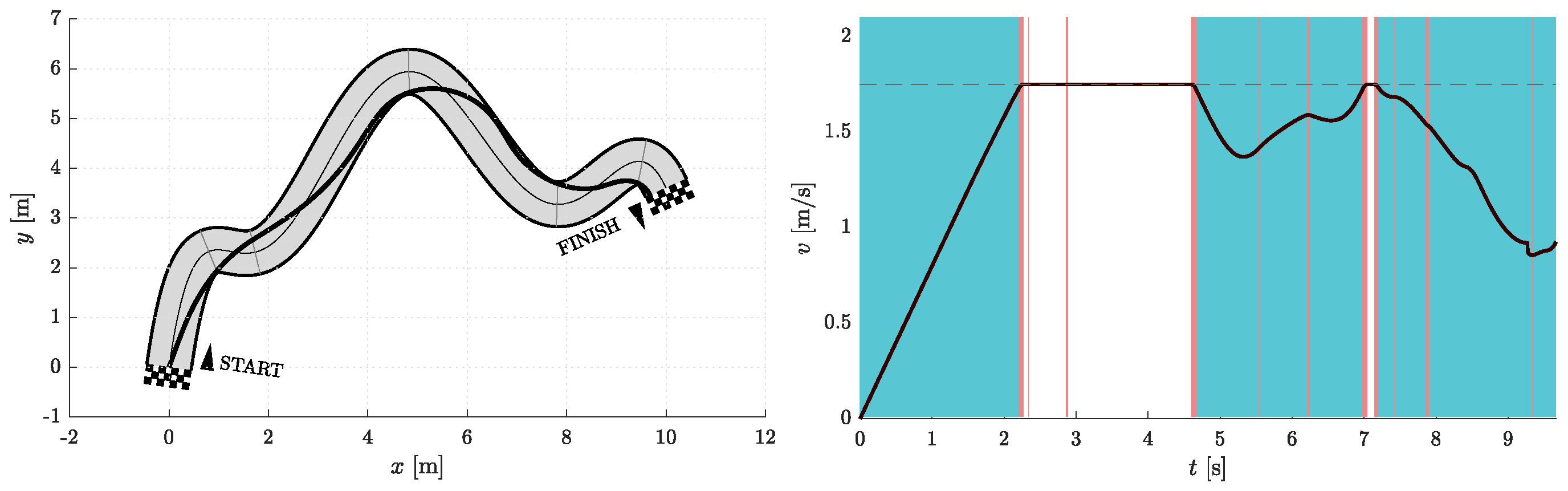
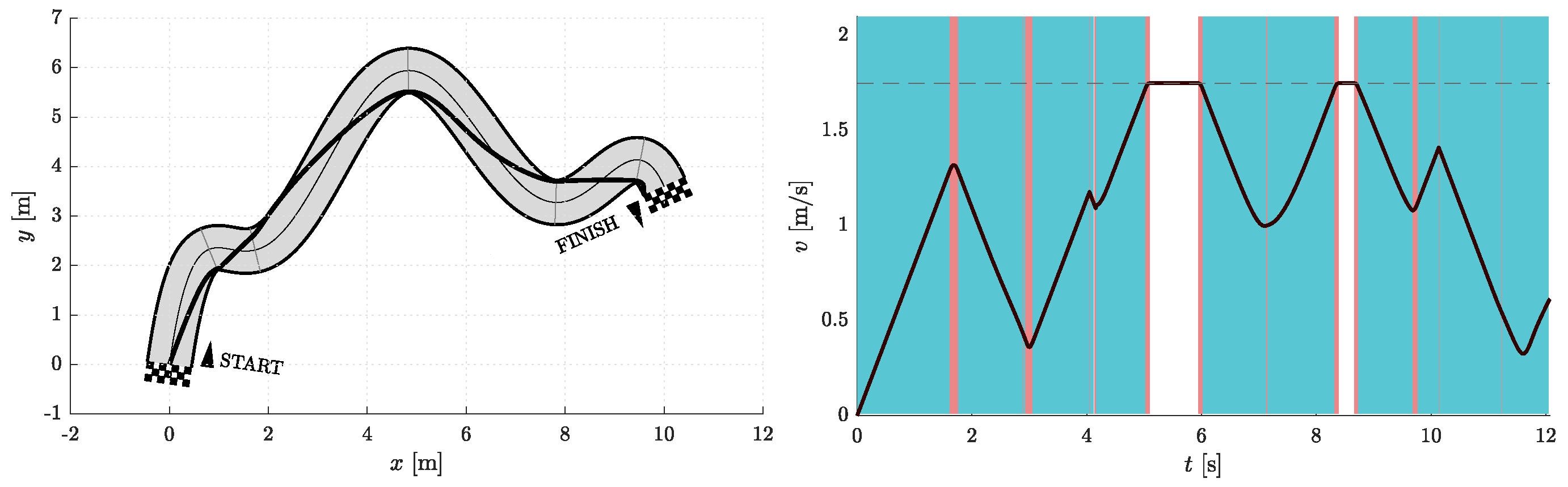
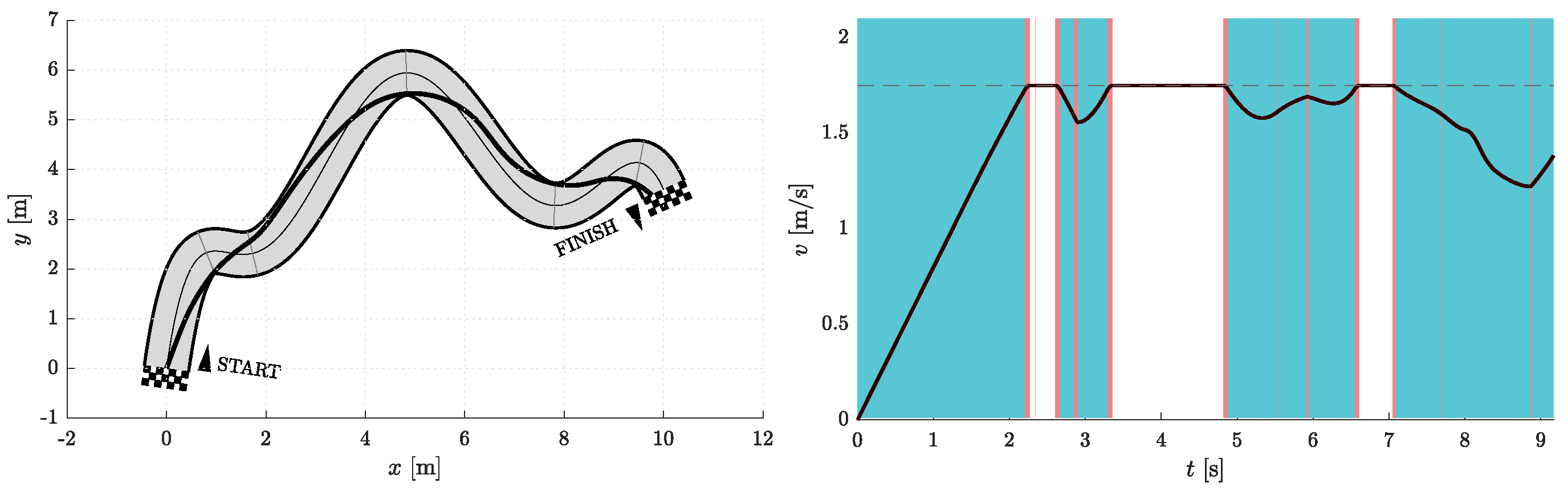
6.1. Racetrack Environment
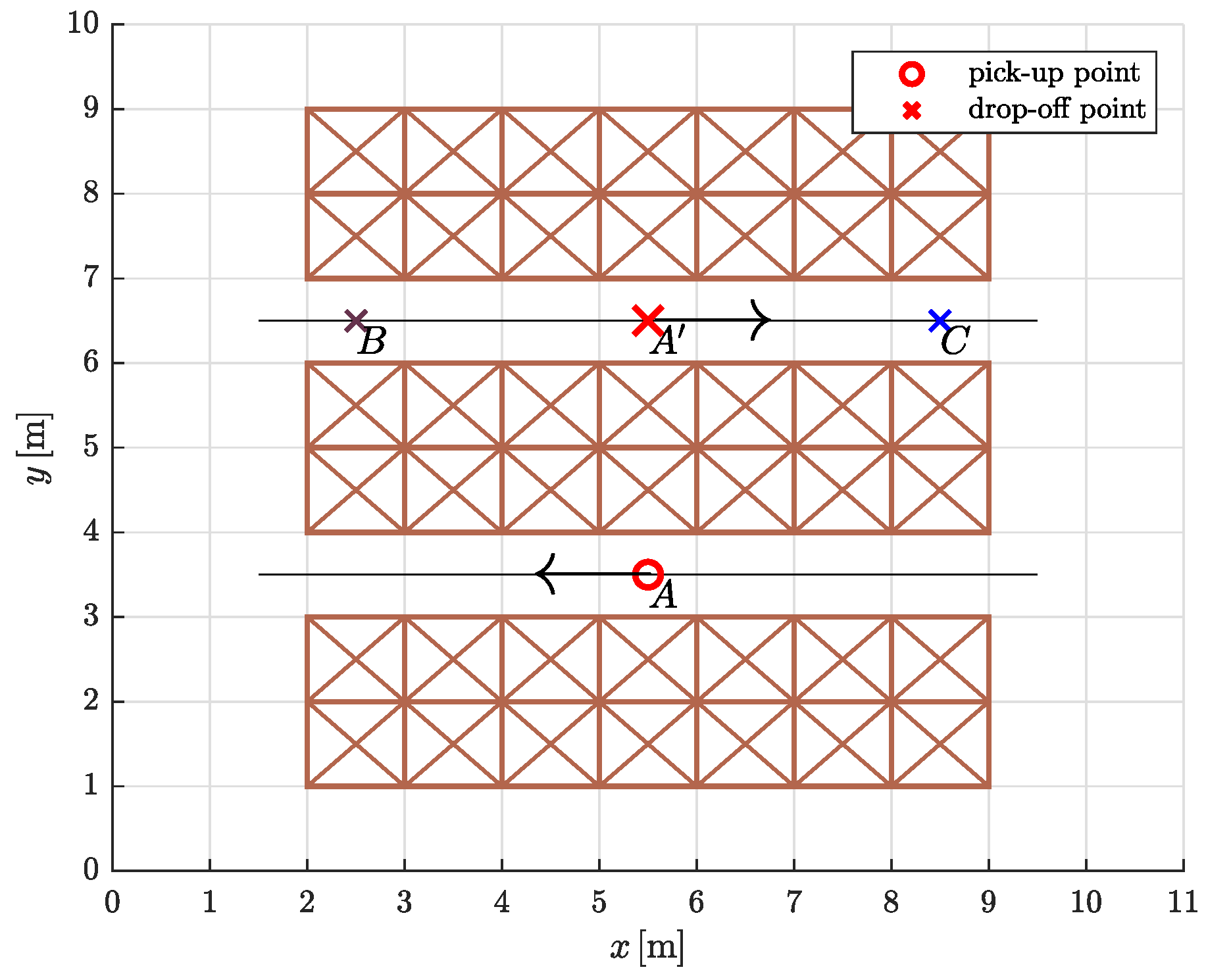
6.2. Warehouse Environment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path Planning and Trajectory Planning Algorithms: A General Overview. In Motion and Operation Planning of Robotic Systems: Background and Practical Approaches; Carbone, G., Gomez-Bravo, F., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 3–27. [Google Scholar] [CrossRef]
- Tharwat, A.; Elhoseny, M.; Hassanien, A.E.; Gabel, T.; Kumar, A. Intelligent Bézier curve-based path planning model using Chaotic Particle Swarm Optimization algorithm. Clust. Comput. 2019, 22, 4745–4766. [Google Scholar] [CrossRef]
- Zhang, H.; Yang, S. Smooth path and velocity planning under 3D path constraints for car-like vehicles. Robot. Auton. Syst. 2018, 107, 87–99. [Google Scholar] [CrossRef]
- Tsirlin, M. Jerk by axes in motion along a space curve. J. Theor. Appl. Mech. 2017, 55, 1437–1441. [Google Scholar] [CrossRef]
- Benko Loknar, M.; Blažič, S.; Klančar, G. Minimum-time velocity profile planning for planar motion considering velocity, acceleration and jerk constraints. Int. J. Control. 2023, 96, 251–265. [Google Scholar] [CrossRef]
- Zdešar, A.; Škrjanc, I. Optimum Velocity Profile of Multiple Bernstein-Bézier Curves Subject to Constraints for Mobile Robots. ACM Trans. Intell. Syst. Technol. 2018, 9, 1–23. [Google Scholar] [CrossRef]
- Consolini, L.; Locatelli, M.; Minari, A.; Nagy, A.; Vajk, I. Optimal Time-Complexity Speed Planning for Robot Manipulators. IEEE Trans. Robot. 2019, 35, 790–797. [Google Scholar] [CrossRef]
- Lima, P.F.; Trincavelli, M.; Martensson, J.; Wahlberg, B. Clothoid-Based Speed Profiler and Control for Autonomous Driving. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 2194–2199. [Google Scholar] [CrossRef]
- Hayati, H.; Eager, D.; Pendrill, A.M.; Alberg, H. Jerk within the Context of Science and Engineering—A Systematic Review. Vibration 2020, 3, 371–409. [Google Scholar] [CrossRef]
- Sato, R.; Shirase, K. Analytical time constant design for jerk-limited acceleration profiles to minimize residual vibration after positioning operation in NC machine tools. Precis. Eng. 2021, 71, 47–56. [Google Scholar] [CrossRef]
- Ma, J.w.; Gao, S.; Yan, H.t.; Lv, Q.; Hu, G.q. A new approach to time-optimal trajectory planning with torque and jerk limits for robot. Robot. Auton. Syst. 2021, 140, 103744. [Google Scholar] [CrossRef]
- Rout, A.; BBVL, D.; Biswal, B.B.; Mahanta, G.B. Optimal trajectory planning of industrial robot for improving positional accuracy. Ind. Robot. Int. J. Robot. Res. Appl. 2021, 48, 71–83. [Google Scholar] [CrossRef]
- Palleschi, A.; Garabini, M.; Caporale, D.; Pallottino, L. Time-optimal path tracking for jerk controlled robots. IEEE Robot. Autom. Lett. 2019, 4, 3932–3939. [Google Scholar] [CrossRef]
- Lin, J.; Somani, N.; Hu, B.; Rickert, M.; Knoll, A. An Efficient and Time-Optimal Trajectory Generation Approach for Waypoints under Kinematic Constraints and Error Bounds. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018; pp. 5869–5876. [Google Scholar] [CrossRef]
- Pham, H.; Pham, Q.C. On the structure of the time-optimal path parameterization problem with third-order constraints. In Proceedings of the IEEE International Conference on Robotics and Automation, Singapore, 29 May–3 June 2017; pp. 679–686. [Google Scholar] [CrossRef]
- Consolini, L.; Locatelli, M.; Minari, A. A Sequential Algorithm for Jerk Limited Speed Planning. IEEE Trans. Autom. Sci. Eng. 2021, 19, 3192–3209. [Google Scholar] [CrossRef]
- Raineri, M.; Bianco, C.G.L. Jerk limited planner for real-time applications requiring variable velocity bounds. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Vancouver, BC, Canada, 22–26 August 2019; pp. 1611–1617. [Google Scholar] [CrossRef]
- Lima, P.F.; Nilsson, M.; Trincavelli, M.; Martensson, J.; Wahlberg, B. Spatial Model Predictive Control for Smooth and Accurate Steering of an Autonomous Truck. IEEE Trans. Intell. Veh. 2017, 2, 238–250. [Google Scholar] [CrossRef]
- Lu, S.; Zhao, J.; Jiang, L.; Liu, H. Solving the Time-Jerk Optimal Trajectory Planning Problem of a Robot Using Augmented Lagrange Constrained Particle Swarm Optimization. Math. Probl. Eng. 2017, 2017, 1–10. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path planning for the mobile robot: A review. Symmetry 2018, 10, 450. [Google Scholar] [CrossRef] [Green Version]
- Patle, B.K.; Babu L, G.; Pandey, A.; Parhi, D.R.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Abdallaoui, S.; Aglzim, E.H.; Chaibet, A.; Kribèche, A. Thorough Review Analysis of Safe Control of Autonomous Vehicles: Path Planning and Navigation Techniques. Energies 2022, 15, 1358. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path Smoothing Techniques in Robot Navigation: State-of-the-Art, Current and Future Challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef]
- Kim, Y.; Kim, B.K. Time-Optimal Trajectory Planning Based on Dynamics for Differential-Wheeled Mobile Robots with a Geometric Corridor. IEEE Trans. Ind. Electron. 2017, 64, 5502–5512. [Google Scholar] [CrossRef]
- Ghazaei, M.; Robertsson, A.; Johansson, R. Online Minimum-Jerk Trajectory Generation. Proc. IMA Conf. Math. Robot. 2015. [Google Scholar]
- Renny Simba, K.; Uchiyama, N.; Sano, S. Real-time smooth trajectory generation for nonholonomic mobile robots using Bézier curves. Robot. Comput. Integr. Manuf. 2016, 41, 31–42. [Google Scholar] [CrossRef]
- Song, B.; Wang, Z.; Zou, L. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Kielas-Jensen, C.; Cichella, V.; Berry, T.; Kaminer, I.; Walton, C.; Pascoal, A. Bernstein Polynomial-Based Method for Solving Optimal Trajectory Generation Problems. Sensors 2022, 22, 1869. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Tan, M.; Wang, L.; Wang, Q. A cubic spline method combing improved particle swarm optimization for robot path planning in dynamic uncertain environment. Int. J. Adv. Robot. Syst. 2020, 17, 172988141989166. [Google Scholar] [CrossRef]
- Eshtehardian, S.A.; Khodaygan, S. A continuous RRT*-based path planning method for non-holonomic mobile robots using B-spline curves. J. Ambient. Intell. Humaniz. Comput. 2022. [Google Scholar] [CrossRef]
- Kang, C.M.; Lee, S.H.; Chung, C.C. On-Road Path Generation and Control for Waypoints Tracking. IEEE Intell. Transp. Syst. Mag. 2017, 9, 36–45. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Emaru, T. SHP: Smooth Hypocycloidal Paths with Collision-Free and Decoupled Multi-Robot Path Planning. Int. J. Adv. Robot. Syst. 2016, 13, 133. [Google Scholar] [CrossRef]
- Bulut, V. Path planning for autonomous ground vehicles based on quintic trigonometric Bézier curve: Path planning based on quintic trigonometric Bézier curve. J. Braz. Soc. Mech. Sci. Eng. 2021, 43, 1–14. [Google Scholar] [CrossRef]
- Artunedo, A.; Villagra, J.; Godoy, J. Real-Time Motion Planning Approach for Automated Driving in Urban Environments. IEEE Access 2019, 7, 180039–180053. [Google Scholar] [CrossRef]
- Zhang, B.; Zhu, D. A new method on motion planning for mobile robots using jump point search and Bezier curves. Int. J. Adv. Robot. Syst. 2021, 18, 1–11. [Google Scholar] [CrossRef]
- Yu, L.; Wang, X.; Hou, Z.; Du, Z.; Zeng, Y.; Mu, Z. Path planning optimization for driverless vehicle in parallel parking integrating radial basis function neural network. Appl. Sci. 2021, 11, 8178. [Google Scholar] [CrossRef]
- Kumar, N.V.; Kumar, C.S. Development of collision free path planning algorithm for warehouse mobile robot. Procedia Comput. Sci. 2018, 133, 456–463. [Google Scholar] [CrossRef]
- Frego, M.; Bevilacqua, P.; Divan, S.; Zenatti, F.; Palopoli, L.; Biral, F.; Fontanelli, D. Minimum Time—Minimum Jerk Optimal Traffic Management for AGVs. IEEE Robot. Autom. Lett. 2020, 5, 5307–5314. [Google Scholar] [CrossRef]
- Kim, C.; Suh, J.; Han, J.H. Development of a hybrid path planning algorithm and a bio-inspired control for an omni-wheel mobile robot. Sensors 2020, 20, 4258. [Google Scholar] [CrossRef]
- Lee, H.; Hong, J.; Jeong, J. MARL-Based Dual Reward Model on Segmented Actions for Multiple Mobile Robots in Automated Warehouse Environment. Appl. Sci. 2022, 12, 4703. [Google Scholar] [CrossRef]
- Schot, S.H. Jerk: The time rate of change of acceleration. Am. J. Phys. 1978, 46, 1090–1094. [Google Scholar] [CrossRef]
- Lepetič, M.; Klančar, G.; Škrjanc, I.; Matko, D.; Potočnik, B. Time optimal path planning considering acceleration limits. Robot. Auton. Syst. 2003, 45, 199–210. [Google Scholar] [CrossRef]
- Blažič, S.; Klančar, G. Effective Parametrization of Low Order Bézier Motion Primitives for Continuous-Curvature Path-Planning Applications. Electronics 2022, 11, 1709. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [s] | [s] | [s] | [s] | [s] | [s] | ||
|---|---|---|---|---|---|---|---|
| 1 | 2 | 2.91 | 4.20 | 7.18 | 9.73 | 11.24 | 12.11 |
| 5 | 2.34 | 2.87 | 5.44 | 7.89 | 9.42 | 10.20 | |
| 2 | 2 | 2.87 | 4.15 | 7.14 | 9.69 | 11.19 | 12.03 |
| 5 | 2.34 | 2.88 | 5.54 | 7.90 | 9.27 | 9.66 | |
| 2 | 2 | 2.89 | 4.16 | 7.13 | 9.68 | 11.22 | 12.07 |
| 5 | 2.34 | 2.90 | 5.52 | 7.68 | 8.87 | 9.17 |
| Load | |||||
|---|---|---|---|---|---|
| [m/s] | [m/s] | [m/s] | [m/s] | [m/s] | |
| ✓ | 1.0 | 2.0 | 1.0 | 4.0 | 4.0 |
| × | 2.25 | 4.0 | 2.0 | 16 | 16 |
| Circular Route Case | Pick Up Point | Drop off Point | Travel Time | ||
|---|---|---|---|---|---|
| PUP → DOP | DOP → PUP | (PUP) | (DOP) | [%] | |
| A | 20.74 | 1.49 | |||
| A | B | 19.08 | 1.62 | ||
| A | C | 22.40 | 1.38 | ||
| A | 20.65 | 1.04 | |||
| A | B | 18.99 | 1.13 | ||
| A | C | 22.25 | 0.66 | ||
| A | 20.44 | 0 | |||
| A | B | 18.78 | 0 | ||
| A | C | 22.10 | 0 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benko Loknar, M.; Klančar, G.; Blažič, S. Minimum-Time Trajectory Generation for Wheeled Mobile Systems Using Bézier Curves with Constraints on Velocity, Acceleration and Jerk. Sensors 2023, 23, 1982. https://0-doi-org.brum.beds.ac.uk/10.3390/s23041982
Benko Loknar M, Klančar G, Blažič S. Minimum-Time Trajectory Generation for Wheeled Mobile Systems Using Bézier Curves with Constraints on Velocity, Acceleration and Jerk. Sensors. 2023; 23(4):1982. https://0-doi-org.brum.beds.ac.uk/10.3390/s23041982
Chicago/Turabian StyleBenko Loknar, Martina, Gregor Klančar, and Sašo Blažič. 2023. "Minimum-Time Trajectory Generation for Wheeled Mobile Systems Using Bézier Curves with Constraints on Velocity, Acceleration and Jerk" Sensors 23, no. 4: 1982. https://0-doi-org.brum.beds.ac.uk/10.3390/s23041982