The issue of global emissions and how to address them is a globally shared concern, leading to the emergence of the renewable energy field, and among the practical options available at all levels of society, solar power is the most widely accepted [
1]. According to the International Energy Agency (IEA), global carbon dioxide (CO
2) emissions from energy combustion and industrial processes increased by 0.9% to a record high of 36.8 Gt in 2022 after two years of pandemic-related oscillations, with CO
2 emissions from energy combustion rising by 1.3% in 2022 while CO
2 emissions from industrial processes declined [
2].
The use of solar energy has resulted in more photovoltaic (PV) solar panels being produced, installed, and maintained. It is crucial to have a dependable inspection process as production is automated to meet demand. These panels may face challenges, like soiling, harsh environments, and damage, which can lower their performance [
1,
3,
4,
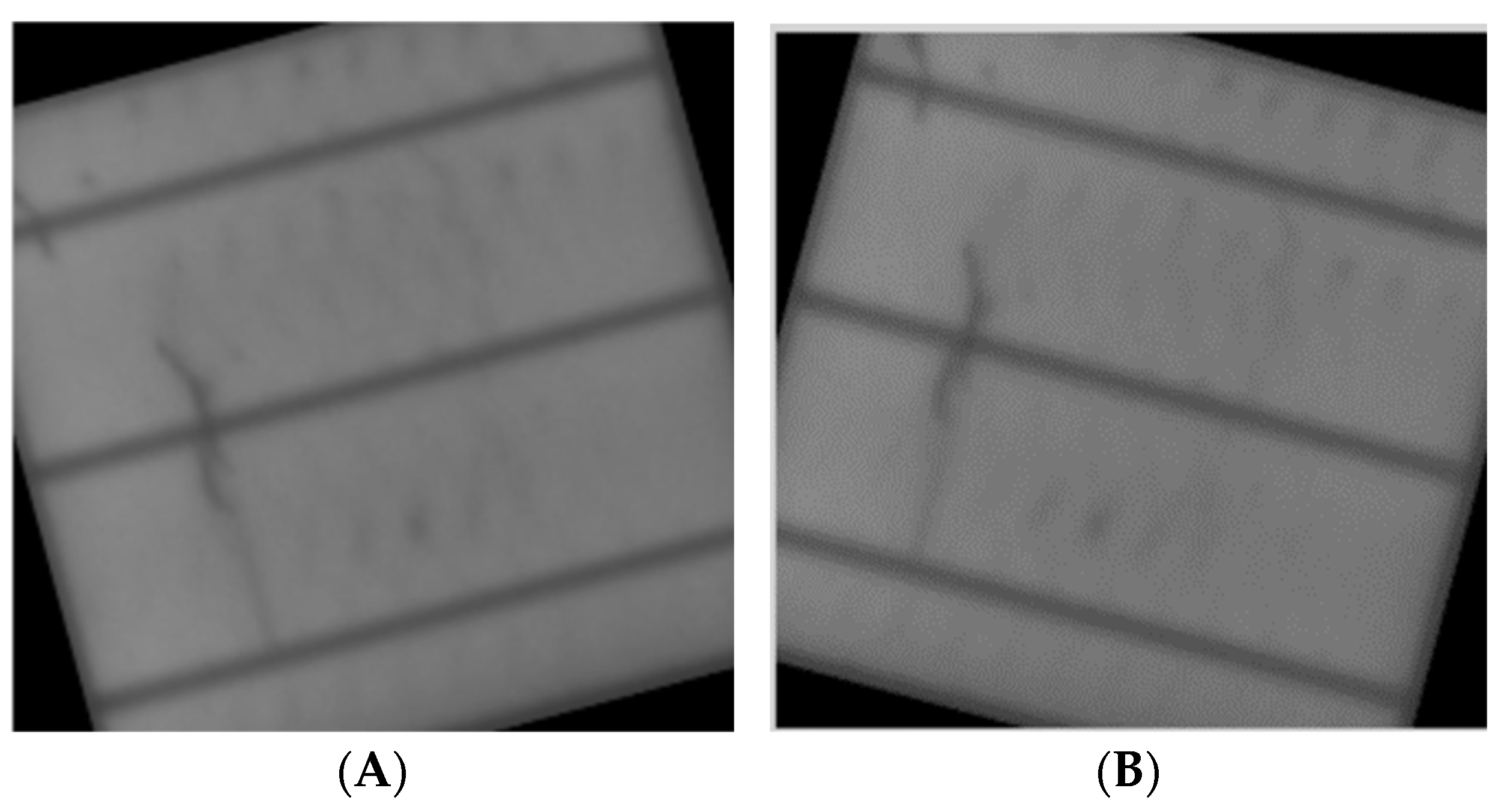
5]. These defects may be in the form of micro-cracks, which can be hard to visually identify [
6], and their manual detection is subject to human error and thus susceptible to low efficiency, high labor costs, high rates of false detection, as well as a high scrap rate [
7]; hence, there is a need to develop an automated process for easy detection.
This study explains how the manual inspection of PV cells in manufacturing facilities is a costly and time-consuming process that can result in human bias. The solution to this problem is integrating computer vision into the inspection process, which can detect defective PV cells more quickly and cost effectively. Data collection from within manufacturing facilities can be a cumbersome task due to several issues, including limited accessibility and down-time in the event of needing to deploy an acquisition mechanism for data collection. The complex and sensitive nature of PV manufacturing means researchers cannot simply collect data from a PV manufacturing site; hence, this work proposes the modeling of production floor variance in order to scale a small PV dataset in a representative manner, followed by the development of a lightweight CNN architecture for the on-site, automated detection of micro-cracks occurring during the manufacturing process.
1.1. Literature Review
The popularity and affordability of solar power have led to increased use of translucent solar panels in homes and businesses. However, in utility-scale solar power plants, defects in photovoltaic modules, such as micro-cracks, must be identified to maintain efficiency. Gabor et al. [
8] examined the potential of UV fluorescence (UVF) for detecting cracked cells in solar panels via a pole-mounted UV flash camera system applied to residential rooftops in Boulder, Colorado, and they found that the pole-mounted UVF system is highly applicable and informative for detecting defects for a range of residential panel ages and designs, and it can provide additional information to that from electroluminescence imaging. Han et al. [
9] proposed a deep learning approach using an improved version of YOLOv3-tiny to detect faults in solar panels with the aid of a UAV equipped with a thermal camera and GPS to acquire thermal images and locate faults. The information is transmitted to a remote server for visualization via long-term evolution (LTE), and the proposed DL model outperforms the current default YOLOv3-tiny model, achieving a high accuracy of 96.45%.
Espinosa et al. [
10] proposed using a CNN to automatically classify physical faults in PV plants by segmenting and classifying RGB images, and they included experimental results for both two output classes (no fault and fault) and four output classes (no fault, dust, cracks, and shadows), achieving an average accuracy of 75% for the two output classes and 70% for the four output classes, which demonstrated its potential as a classification method for PV systems. Acharya et al. [
11] also proposed a method for classifying different types of defects in solar cells using a deep Siamese convolutional neural network (CNN). The EL image is first preprocessed to remove noise and distortions, and then the proposed model is tested on a standard EL image dataset. Simulation results show that the proposed model achieves better classification accuracy with a 90% AUC in detecting defective solar cells.
While using advanced CNN architectures and ensemble learning to detect micro-cracks in EL images of PV modules, Rahman et al. [
12] achieved high accuracy rates of 97.06% and 96.97% for polycrystalline and monocrystalline solar panels, respectively, by utilizing pre-trained models, including Inception-v3, VGG-19, VGG-16, Inception-ResNet50-v2, Xception, and ResNet50-v2 [
13]. Akram et al. [
14], on the other hand, adopted a CNN-based deep learning architecture using an “isolated model” which had been trained with samples from the EL PV cell and employed transfer learning for fine-tuning the architecture, achieving an accuracy rate of 99.23%, though the generalization and accurate representativeness of the trained model may raise concerns due to the size of the dataset. However, Mathias et al. [
15] expanded the study by training 2000 EL images and testing 300 EL images. The preprocessing stage involved applying perspective transformation and separating the solar panel section and individual solar cells from the PV panel. Textural features were extracted from these cells using DWT and SWT. Support vector machine and back propagation neural network were used for classification into cracked and non-cracked cells, and the researchers achieved high classification accuracies of 92.67% and 93.67% using SVM and BPNN, respectively. Winston et al. [
16] also adopted this model, using six input parameters, and both methods showed promising results with average accuracies of 87% and 99%, respectively, and an F1-score of 94.6%, recall of 96.3%, and precision of 87.3% [
17].
In the study of Xue et al. [
18], the authors adopted fuzzy c-means clustering and AlexNet CNN [
4] to accurately detect hidden cracks despite an irregular and composite texture background, thereby achieving stable and precise results with 94.4% accuracy [
19].
In summary, current research on automating the detection of faults in PV systems lacks practical considerations. Although several works have focused on optimizing state-of-the-art CNN architectures for high accuracy, there has been little attention on developing lightweight CNN architecture, i.e., internal architectural complexity. This is a key area for focus as the majority of the state-of-the-art architectures cannot be deployed onto constrained-edge devices due to the high computational complexity of the internal network. Hence, production sites would need to commission high-performance computing, i.e., GPUs, to run state-of-the art CNNs, such as VGG, which significantly increases the cost.
1.2. Paper Contribution
This study has two fundamental contributions. Firstly, as evident from the literature review, the collection of quality PV cell samples for normal and defective cell surfaces is a key component when looking to develop automated CNN algorithms for defect detection and classification. However, the procurement of quality datasets, in particular EL-processed samples can be cumbersome and sometimes practically infeasible due to access restrictions within certain manufacturing facilities. Hence, to provide an alternative route, we present the modelling of internal and external variance in the context of PV cell manufacturing conditions by proposing representative augmentations for appropriately scaling and increasing the variance of EL-based PV datasets. Secondly, a custom CNN architecture with a lightweight footprint is developed (4.67 Million parameters) and trained using the augmented-generated samples. The design and training of a ‘lightweight’ architecture is to address the stringent deployment conditions within manufacturing facilities, such as edge-device deployment, low power consumption, and close-to-the-source inferencing, in addition to generalization via scaled augmentations several regularization techniques, which are applied for further model generalization and to reduce the degree of overfitting.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}