1. Introduction
Underwater acoustic communications (UWACs) have been widely used as sensing and communication techniques in underwater sound measurement and fishing. They are adequately developed and equipped in the underwater sensors of ships, submarines, autonomous underwater vehicles, and so on. However, UWAC channels are time-varying and multipath-fading. The received signals usually have serious Doppler distortion and inter-symbol interference [
1]. Their high-quality channel recovery has attracted wide attention in the literature. Turbo equalization is used to effectively recover original transmission signals by exchanging the extrinsic information between an equalizer and a decoder iteratively [
2]. Many schemes of turbo equalization were proposed for UWACs in the past years. The first Turbo equalization applied to UWACs was a joint maximum a posteriori probability (MAP) equalization [
3]. Although the pre-survivor processing was only adopted to track the most likely path of trellis states for MAP equalization, the computational complexity remains high. Consequently, the design of low complexity turbo equalization based on a minimum mean square error (MMSE) was proposed. Time-domain turbo equalization (TDTE) in UWACs extending conventional MMSE linear equalization or soft decision feedback equalization (SDFE) was reported in the literature [
4,
5]. The receivers exhibit good performance with a computational complexity quadratic scaling at the block length and the length of finite channel impulse response (CIR). The length of the filter for equalization is longer than the UWAC channels, and the lengths of UWAC channels are often longer than 50 [
2]. Therefore, the time-domain turbo equalization still experiences huge computational complexity.
A linear frequency domain turbo equalization (FDTE) was used in UWACs to initially process the received signals and to reduce the computational complexity of time-domain turbo equalization [
6]. In the FDTE, the parallel block equalization filters were implemented using fast Fourier transformation (FFT) with much efficient computation of parallel convolution; it thus improved the computational complexity significantly by reducing many multiplications in the filtering calculations of the TDTE. In addition, some more techniques, such as the selective zero attracting penalty, selective update strategy, bidirectional structure, and so on, can be combined closely in the FDTE to further improve the performance. Good performance was obtained in low-order modulation. However, the performance degraded radically due to severe Doppler shift under high-order modulation. The performance gap between the FDTE and TDTE still exists. Consequently, nonlinear FDTE was applied in UWACs to improve the performance of receivers. An improved FDTE (IFDTE) with interference cancellation and phase-locked loop was applied in UWACs [
7]. Although it effectively overcame the phase ambiguity problem and achieved better performance compared with linear FDTE, its limitation was the high complexity of multiple layers for the equalization of symbols. A frequency domain decision feedback FDTE (FDDF-FDTE) scheme with iterative channel estimation was adopted to achieve a good trade-off between performance and complexity; its feasibility was then verified in terms of the SPACE’08 sea trial data [
8]. Coarse estimation based on the Bayesian principle was utilized to estimate the a posteriori probability of transmitted symbols and to enhance the performance of the FDDF-FDTE [
9]. Therefore, the turbo equalization with the estimation of a posteriori distribution is important in practice.
Expectation propagation (EP) was widely used as the machine learning for signal detection, using simple distributions to approximate complex ones. The block-EP [
10], EP-Filter [
11], and the DFE-IC EP [
12] had outperformed traditional algorithms under the MMSE criterion. The complexity is relatively higher than that of the traditional TDTE due to the self-iteration of the EP. The FDTE based on the EP was applied for multiuser detection with the known channel to reduce the complexity [
13]. To the best of our knowledge, no detailed investigation was conducted on turbo equalization based on the EP in UWACs. Iterative channel estimation can effectively shorten the necessary length of the training sequence for convergence because of the band-limited nature of the UWAC channel, this process improves the efficiency of the spectrum utilization [
14,
15,
16,
17]. However, computational complexity inevitably increases due to the reuse of soft information. Adaptive channel estimation was widely used in UWAC channel estimation due to its simple structure and minimal calculation. However, its accuracy was slightly worse than those of compressed sensing (CS) [
18].
The CS-based channel estimation updated tap coefficients through heuristic search and inverse operations, resulting in high computational complexity. The combination of norm constraint and adaptive algorithm can achieve rapid convergence with minimal computation [
19]. A SZA normal least mean square (NLMS) (SZA-NLMS) algorithm, belonging to the
-norm constrained adaptive algorithm, directly set the tap coefficients below the threshold to zero. Under other similar
-norm constrained channel estimations, it had faster convergence and better signal recovery performance than that of the standard NLMS equalization [
20,
21]. Recently, to effectively combat the selective fading of underwater acoustic channels for single-carrier deep-sea vertical acoustic communications, an improved proportionate normalized minimum-SER (IPNMSER) algorithm was proposed for adaptive turbo equalization by utilizing the minimum-SER (MSER) criterion to minimize the system’s SER directly [
22]. Also, a hybrid frequency–time domain turbo equalizer (FTD-TEQ) was proposed to benefit from two turbo equalizers to solve the slow-convergence problem at different iterative stages for UWACs with comprehensive experimental investigations [
23]. Furthermore, the block implementation of least mean square based frequency domain direct adaptive turbo equalization was proposed for use in UWACs [
24] and it can be combined with excellent Shannon capacity, approaching channel codes for the better performance and security of turbo equalization. Then, security-oriented Polar coding can be adopted based on channel-gain-mapped frozen bits [
25]. And decoding algorithms for low-density parity-check (LDPC) codes were proposed [
26] and they can be used for such applications in turbo equalization.
According to the aforementioned analyses in the literature, efficient turbo equalization with both good performance and low complexity is the exact challenge in UWACs due to the fast time variance fading in UWAC channels. The limitations of existing equalization schemes means they usually do not make full use of signals, especially the more accurate equalization metrics of the a posteriori probability of transmitted symbols. In addition, the EP interference cancellation is not employed for better equalization performance. Then, the above two aspects motivate the need for an improved approach for further improvement in turbo equalization. In this paper, an improved FDTE (IFDTE) with the EP interference cancellation for iterative channel estimation is proposed to promote the performance of signal recovery with low complexity in UWACs. This scheme is studied in a single-input multiple-output (SIMO) system. Its performance improvement and complexity reduction are analyzed and verified through numerical simulations. Finally, the main contributions are summarized as follows.
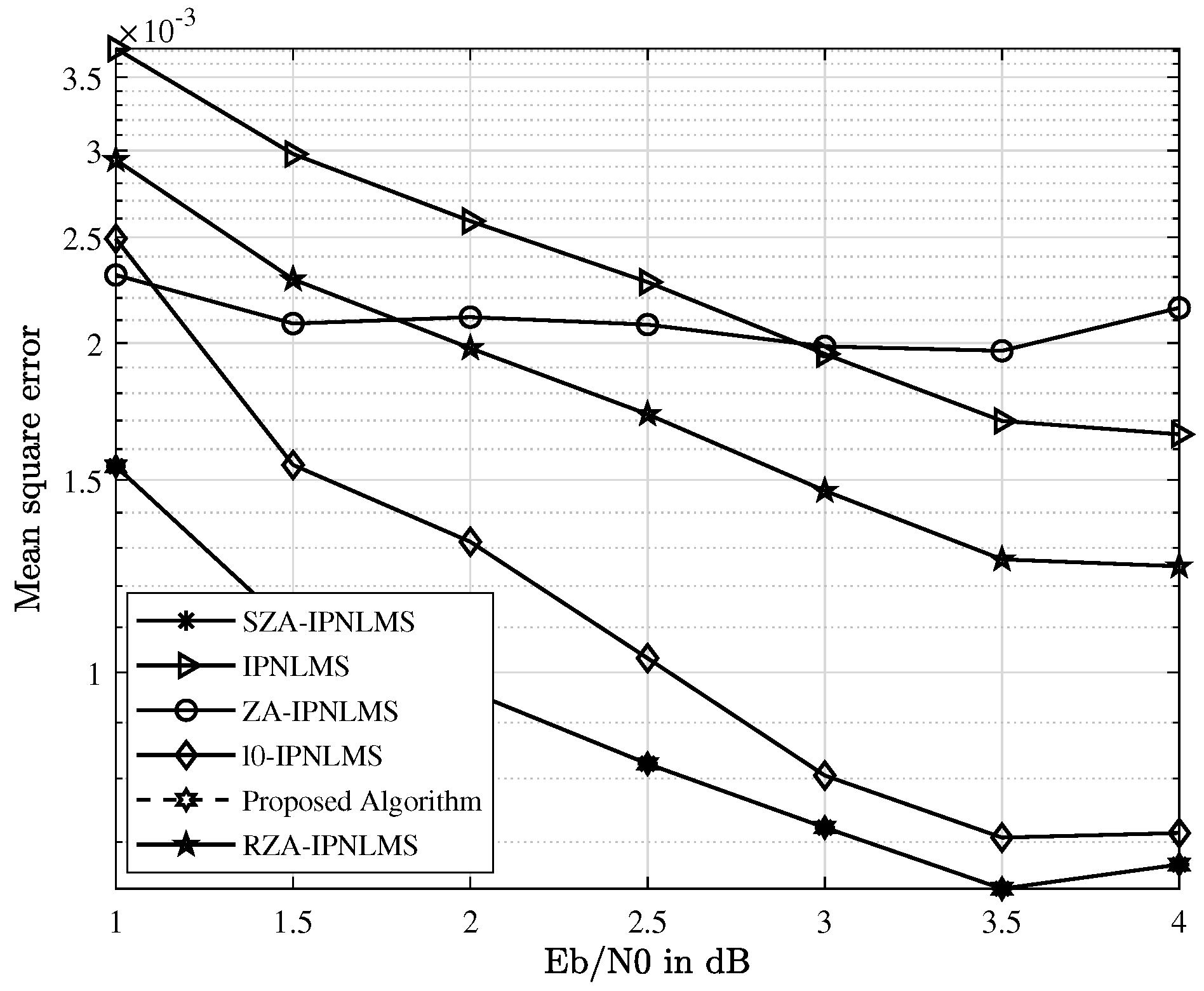
A SZA-IPNLMS is extended to estimate the channel state information (CSI) in terms of training sequences. Compared with the past sparse adaptive channel estimation, the SZA-IPNLMS gives different constraints to update channel coefficients in accordance with the ratio of channel coefficients to the maximum one. Thus, small channel coefficients are preserved well, and precise CSI is obtained.
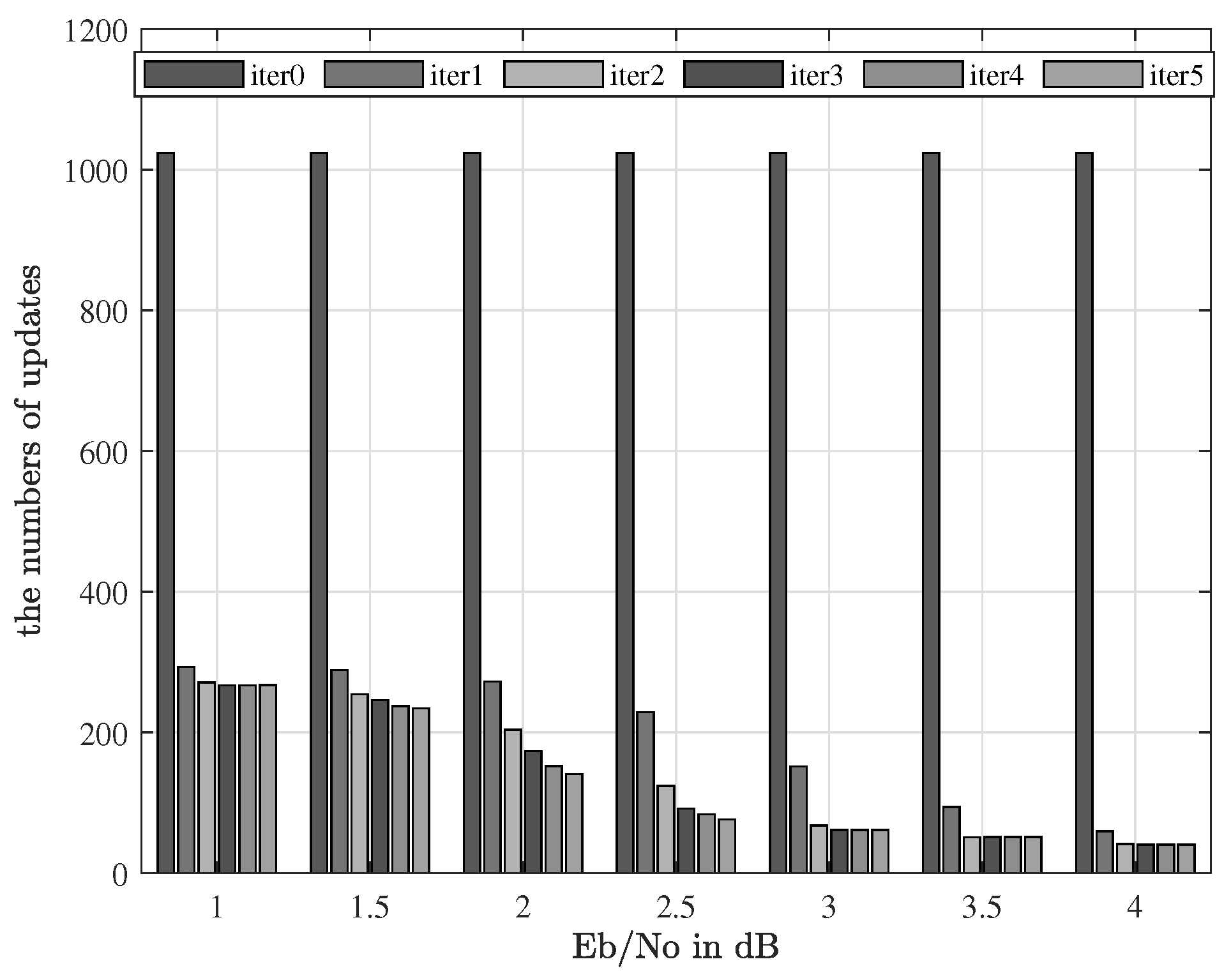
Compared with traditional iterative channel estimation in UWACs, a threshold is set to selectively update the coefficients with a large offset in terms of the estimated noise variance using the SZA-IPNLMS. Thus, it effectively reduces the unnecessary updating of the channel coefficients. A SZA-DIPNLMS is adopted to replace the SZA-IPNLMS for reducing the counts of update operations for the proportionate step matrix through a fixed update period. The step size is dynamically set in accordance with the noise variance and offset of the estimation to maintain a good performance. In this way, the computational complexity of the iterative channel estimation is effectively reduced with a small bit error rate (BER) loss.
The IFDTE is applied to UWACs combined with iterative channel estimation. Different from the traditional equalization used in UWACs, the IFDTE obtains a precise a posteriori probability of the transmitted symbols by estimating them iteratively based on the EP. In this way, the IFDTE achieves good performance of the UWAC signal recovery with trade-off complexity compared with those of traditional FDTEs. A bidirectional structure of equalization is utilized to acquire the bidirectional gain to promote the performance of the IFDTE. Thus, the bidirectional IFDTE (Bi-IFDTE) achieves a better performance than the IFDTE. Because of the reliable a posteriori estimation of symbols obtained by the EP, symbols mapped based on an a posteriori estimation served as the training sequence to improve the performance of the channel estimation. Through the high precise channel and symbols, the estimation improves the performance of the interference cancellation in the equalization to achieve a high-quality recovery of UWAC signals.
The organization of this paper is briefly introduced as follows.
Section 2 presents a SIMO model of UWACs.
Section 3 introduces sparse adaptive channel estimation with a SZA term. A low complexity iterative channel estimation with a selective update of channel coefficients is proposed. Different from the traditional turbo equalization in UWACs, the IFDTE based on the EP is introduced in detail to estimate the actual a posteriori distribution precisely. A bidirectional structure of equalization is proposed to further enhance the performance of the IFDTE. The complexity of the IFDTE is analyzed in this part. The computational complexity of the IFDTE is slightly higher than the traditional FDTE but lower than the traditional TDTE.
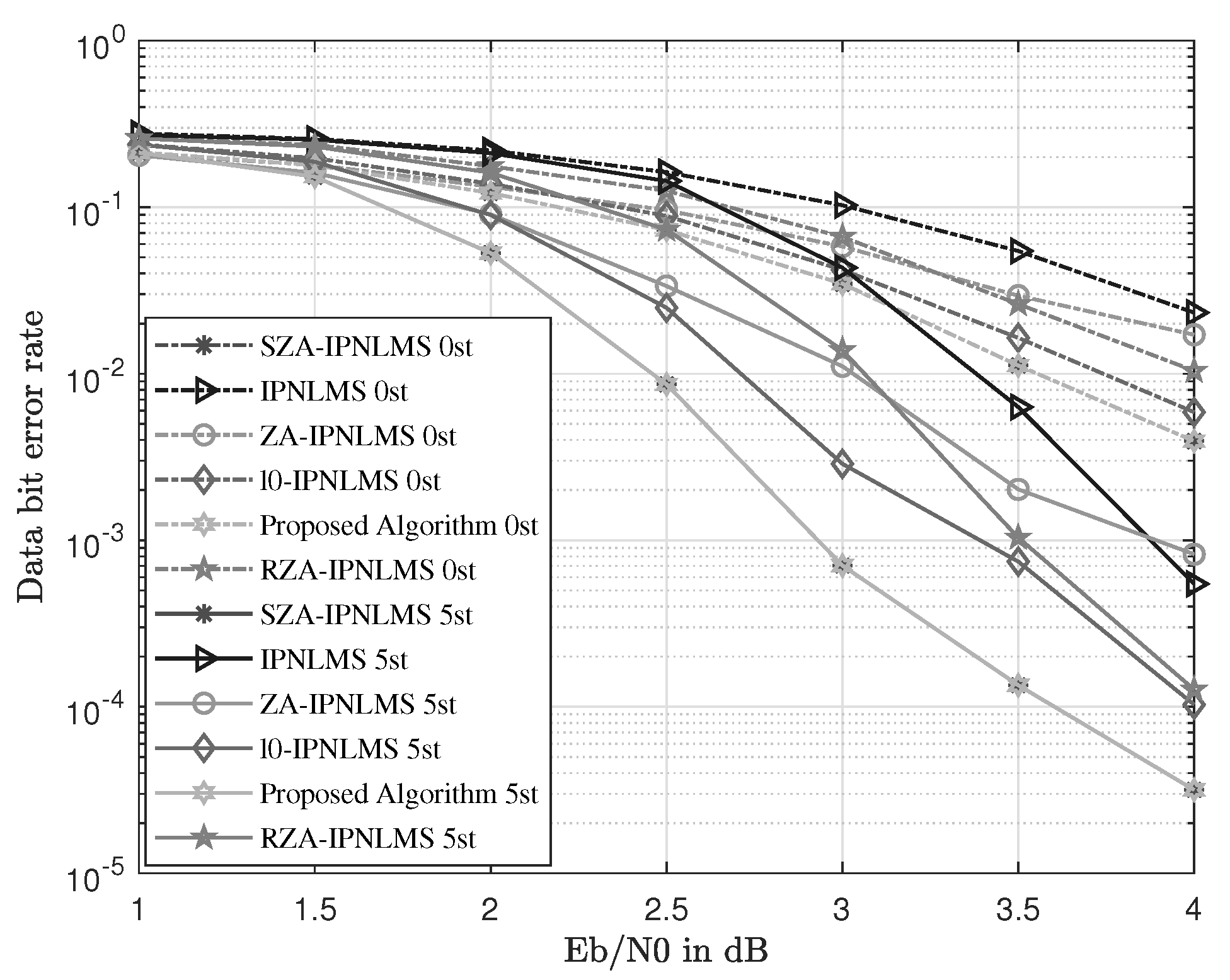
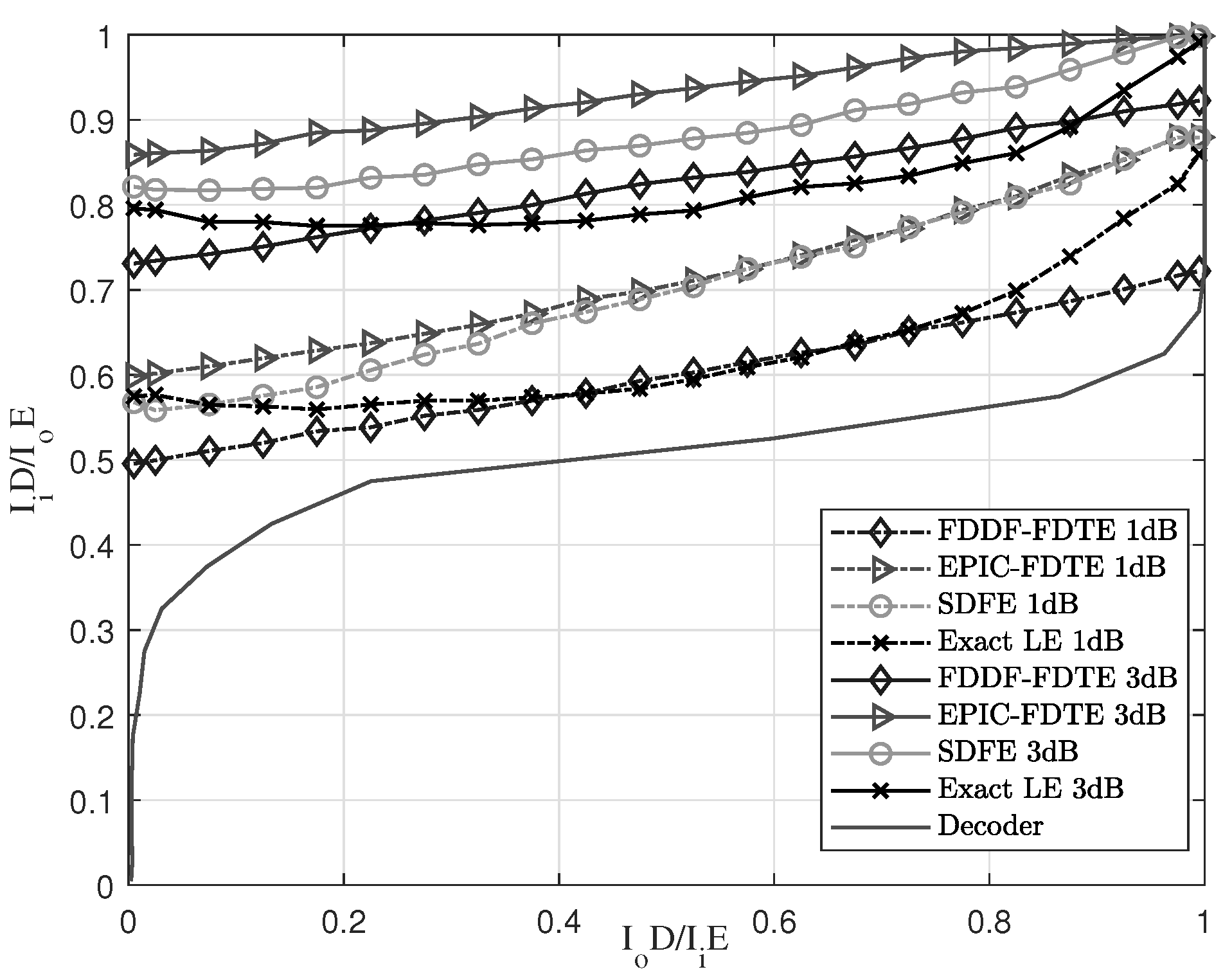
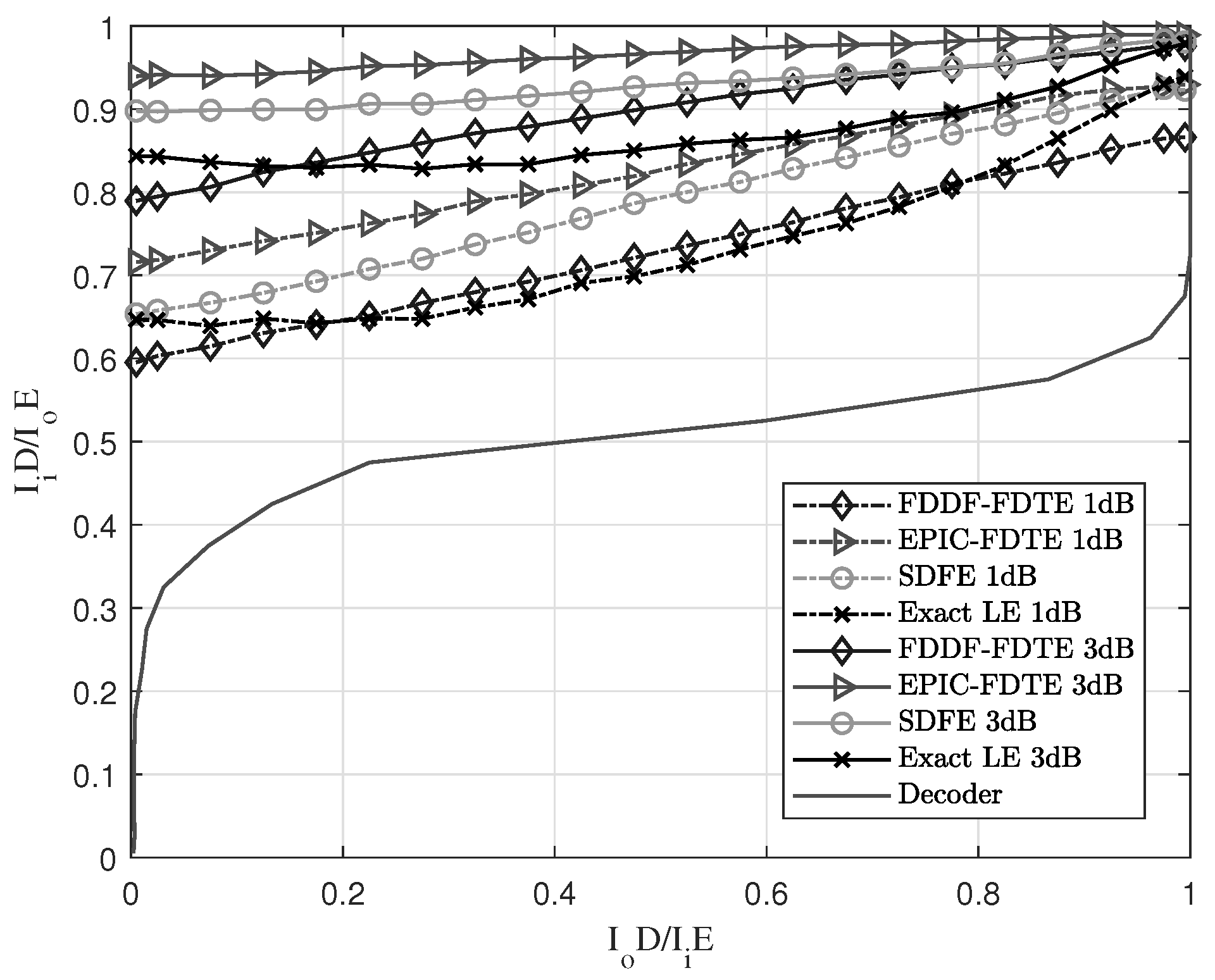
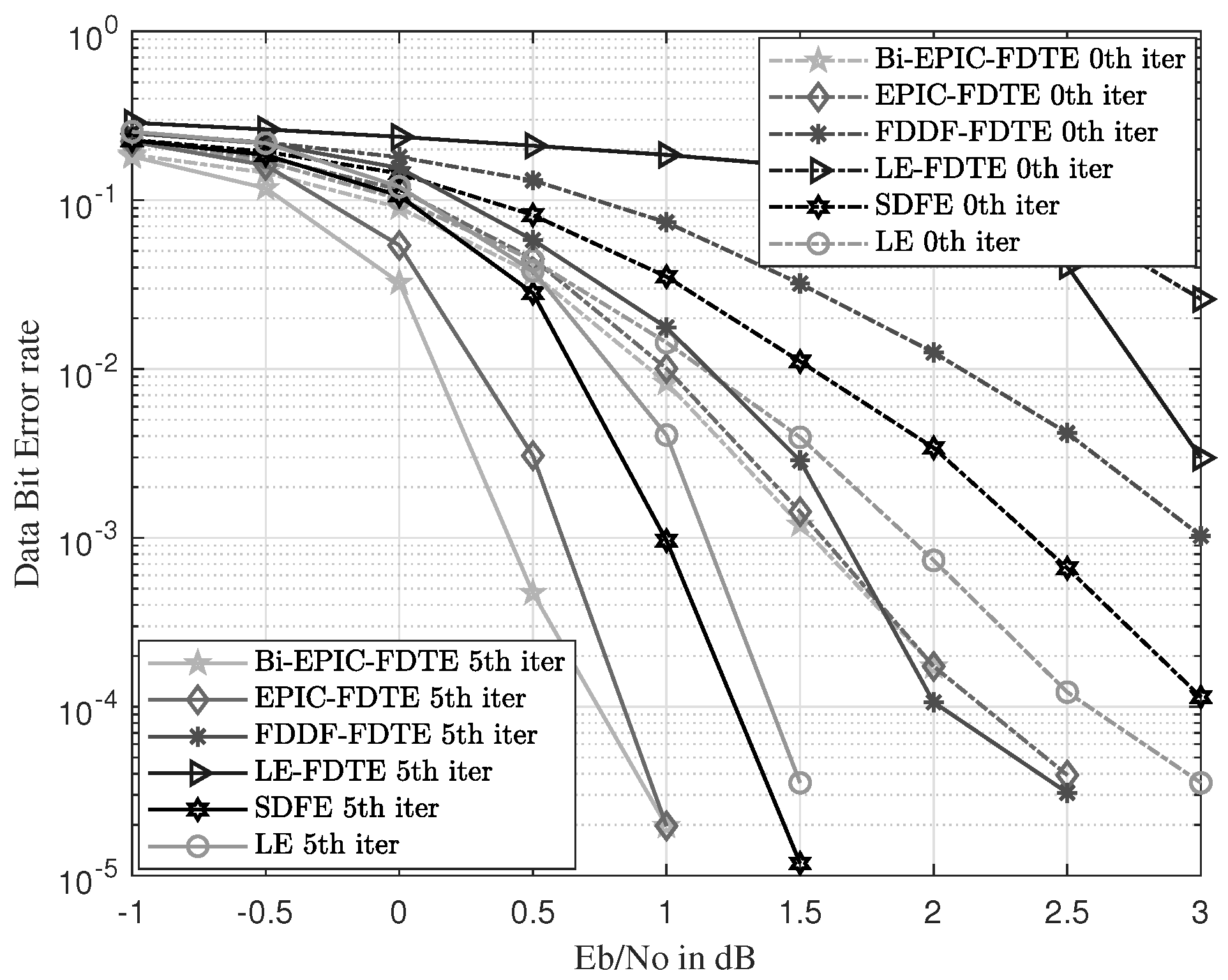
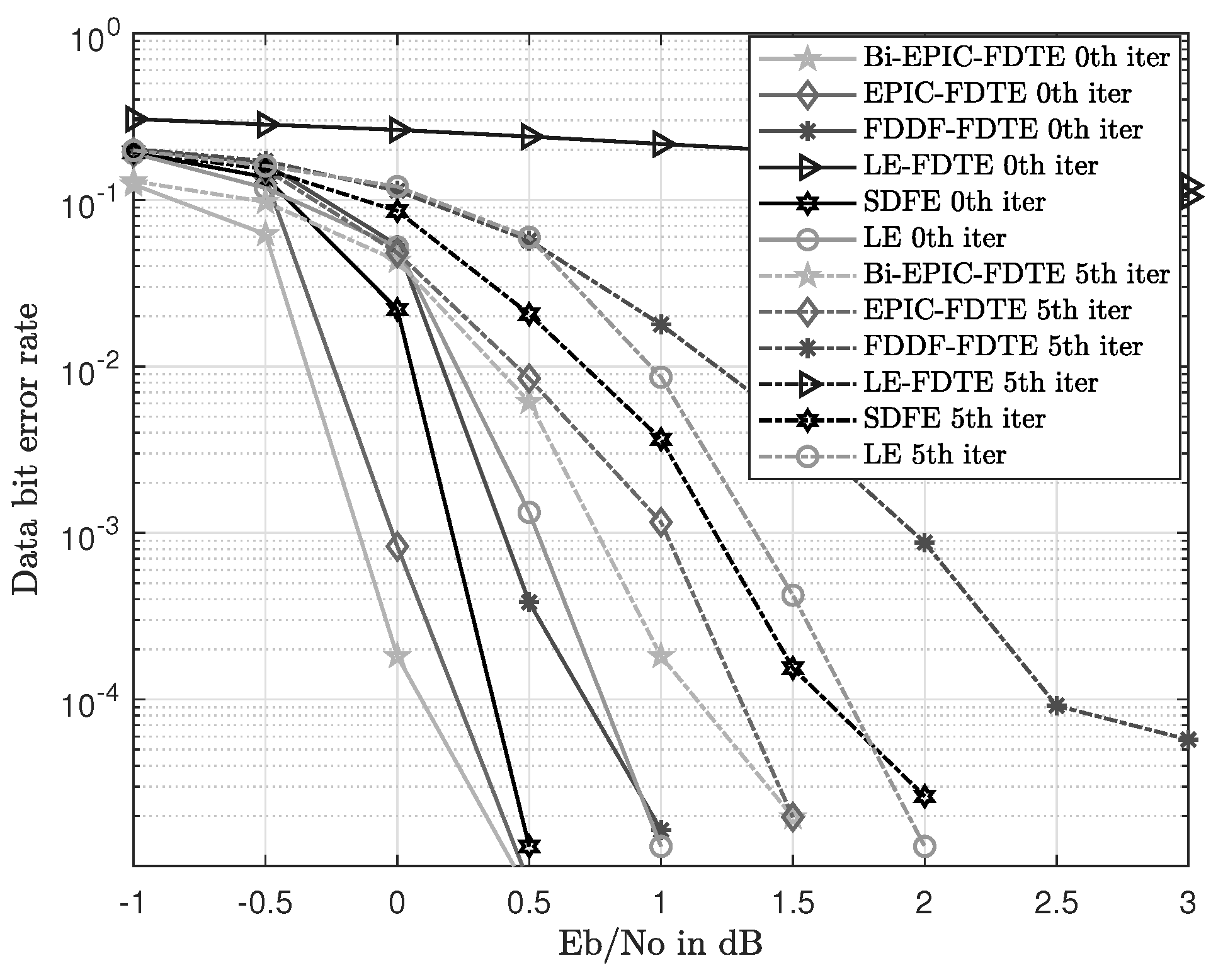
Section 4 analyses the MSE, BER performance, and computational complexity of the proposed channel estimation scheme. Extrinsic information transfer (EXIT) charts and BER curves are applied jointly for numerical simulations to verify the good performance of convergence and signal recovery. The results show that the proposed scheme outperforms other existing equalization schemes.
Section 5 concludes the whole paper. The list of abbreviations used in this paper is shown in the abbreviations for clarity.
2. SIMO System Model in UWACs
Suppose a binary bit sequence
is emitted in the transmitter, where the
is the length of the bit sequence. This sequence is denoted as “0” or “1” by channel encoding with binary code bit
. The coded bits are interleaved and then mapped to the sequence of symbols
, where
,
is a set of mapping symbols, and
is mapped by Q bit coded bits
, where
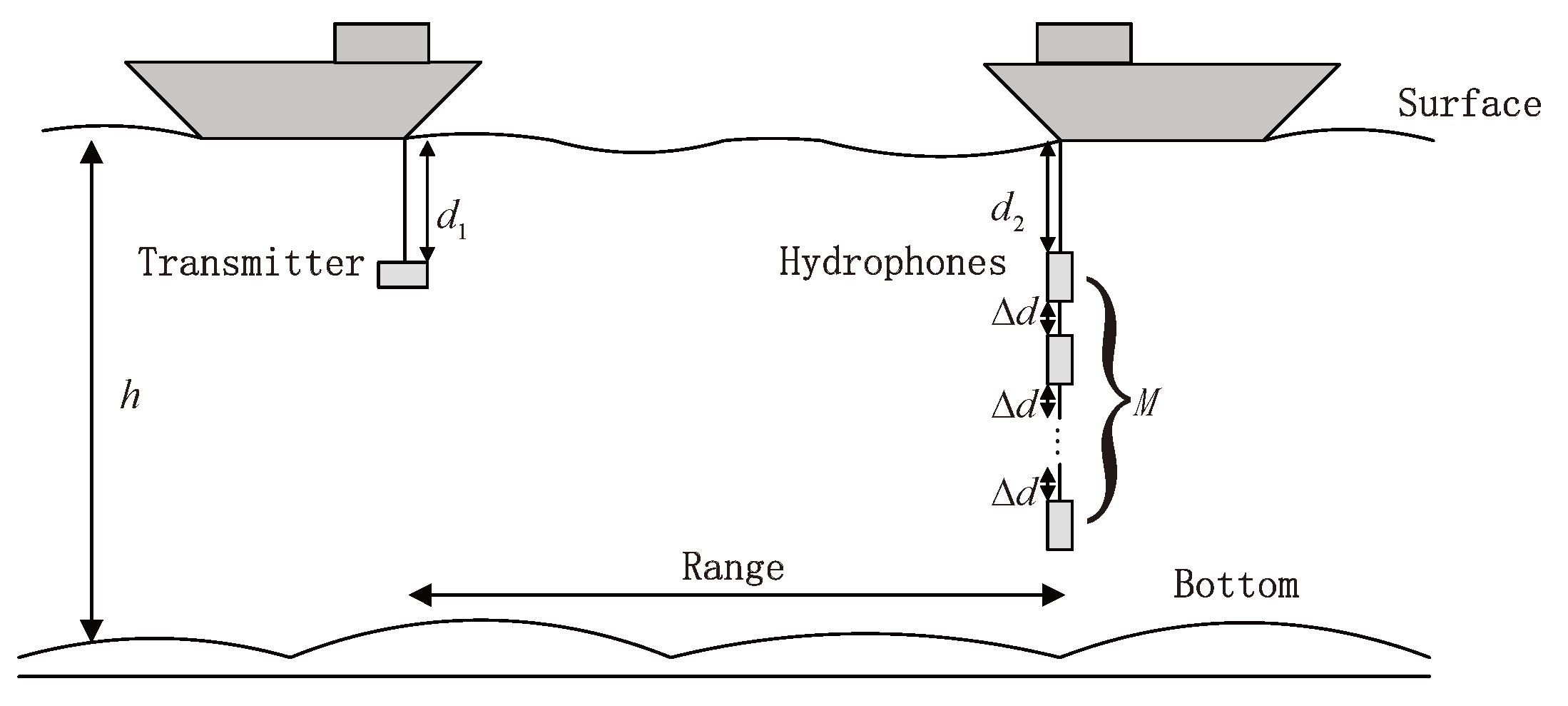
. Subsequently, the training sequence is then inserted into the front of the information blocks. The blocks are modulated to carriers, transmitted through UWAC channels, and received by a hydrophone array, as shown in
Figure 1.
The UWAC channels between the transmitter and hydrophones are time-varying. Each symbol block remains unchanged, and the channel varies randomly between different blocks. After synchronization and sampling, the received symbols are expressed as
where
is the received vector of
M channel hydrophones, where
with
,
is the additive noise vector where
with
, and
for ease of modeling, where
denotes the complex Gaussian distribution, and
is the variance of the noise.
is the UWAC channel state and block circulant matrix with the first column
, where
, and
L is the channel length.
3. Proposed FDTE with Iterative Channel Estimation
Here, a SIMO IFDTE scheme with low complexity iterative channel estimation is proposed. First, the sparse channel estimation is designed. Second, the proposed IFDTE processes the received symbols in terms of the above estimated CSI. The combination of bidirectional extrinsic information is adopted to accelerate the equalization convergence. The a posteriori soft decision promotes the performance for channel estimation. Finally, the flow chart of the entire scheme with complexity analyses are presented to enhance understanding.
Traditional turbo equalization mainly exploits the MMSE criterion for independent Gaussian distribution (i.i.d) symbols. The distribution characteristics are usually ignored, easily resulting in equalization performance being degraded. An EP equalization based on simple Gaussian distribution is proposed to approximate the actual posterior distribution of the transmission symbol through moment matching, so this scheme is used to effectively improve the equalization.
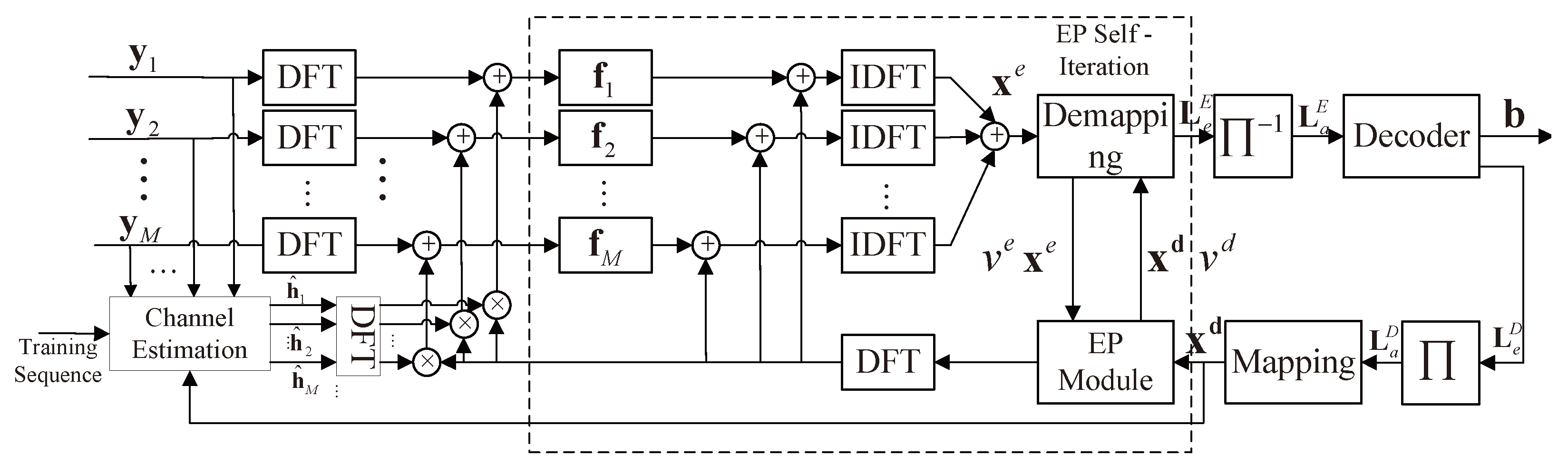
The entire turbo equalization can be described as follows. First, adaptive channel estimation is adopted to estimate the CSI in terms of training sequences and is fed back to the turbo equalization in the frequency domain. Second, the moment of the a posteriori distribution of the transmitted codeword is approximately matched through the frequency domain EP turbo equalization in terms of the channel state and a priori decoding information
. Finally, the a posteriori information calculated by the a posteriori probability is adopted after the self-iteration based on the EP. This information is used to calculate the extrinsic information
of the equalization, and
is fed back to the decoder. If the maximum turbo iteration is not reached, the
of the decoder is outputted. Otherwise, the final results of the codeword is outputted. The block diagram of the FDTE with the EP in a SIMO UWAC system is designed and shown in
Figure 2.
3.1. Sparse Adaptive Channel Estimation
Channel estimation is a key process in the equalization of received UWAC signals. The SZA-IPNLMS is adopted to estimate the sparse channel efficiently.
The length of training sequence
at the
k-th moment is
L, and the training sequence is
. The received signal by the
m-th hydrophone at the
k-th moment is, and the offset of channel estimation is
.
represents the estimated value of the impulse response of the UWAC channel at the k-th moment, and the channel coefficients of
are updated as
where
is the adjustment factor to avoid the stopping of the iteration due to the extremely small denominator in the initial stage.
is a diagonal proportionate matrix,
is calculated as
where
represents absolute value operation,
represents
norm, and
indicates the norm constraint factor and is expressed as
where
is the threshold,
is shrinkage step size,
represents the
p-th element of the vector, and
is given by
The noise variance is estimated using the equation in [
16]:
In the initial iteration,
. The channel estimation based on soft feedback from the turbo equalization is performed, and the offset of the soft iterative channel estimation is
where
,
can be obtained by
The extrinsic information
fits the Gaussian distribution. Due to the estimation offset of
existing between the soft mapping and the actual symbols, the relationship between them is denoted as
Therefore, the offset of channel estimation needs to be subtracted to update the noise variance estimation in each iteration, and the variance of the soft decision is given by
where
is the covariance matrix of
. When iterative channel estimation is performed, the channel coefficients are updated by the DIPNLMS [
21], and the update of channel coefficients is denoted as
where
is the defined membership, and
is the differential proportionate diagonal matrix. By updating the step size matrix by period D,
of
is calculated as
when
, the proportionate matrix
is calculated with the channel estimation by reusing the training sequence.
3.2. Expectation Propagation Interference Cancellation FDTE
The frequency domain expression of the m-th hydrophone received symbols in the m-th hydrophone is expressed as
where
,
,
is the circulant matrix, the first column of
is
,
, where
, and
is the normalized
K-discrete Fourier transformation (DFT) matrix. Thus,
, where
is the operation of diagonalization.
is obtained through DFT from
.
In
Figure 2, the scheme mainly includes a symbol probability estimation module based on the EP and frequency domain equalization. In accordance with the extrinsic information from the decoder, the a priori probability is calculated as
where
is the extrinsic information from the decoder and serves as the a posteriori information in equalization. In the first iteration, no a posteriori information input is found, and
is initially set to zero. On the basis of the Bayesian principle, the discrete a posteriori probability can be calculated using
and a posteriori probability
. With the initial iteration,
, and
. The a posteriori probability
is then derived and expressed as
The calculation of (15) is dependent on the two assumptions below. The a posteriori distribution fits the Gaussian distribution, and
is regarded as the a posteriori approximation factor of the EP. Moment matching is adopted to approximate the a posteriori distribution iteratively. The mean
and variance
of the distribution are calculated by
The mean
and variance
of the a posteriori distribution are estimated with moment matching. In accordance with the Bayesian principle and Gaussian operation, mean
and variance
are presented as
The negative variance can be effectively avoided by setting the damping factor , and the stability of the system can be ensured by controlling the update step size. and represent the next and previous states, respectively. and because no previous state exists in the initial iteration. In conclusion, the above procedures are the refining process of the a priori information in equalization.
Subsequently, the optimized a posteriori information and CSI are exploited to process the received signal. The a posteriori probability of the received symbols fits the Gaussian distribution [
10]. The MMSE criterion is used to calculate and obtain the variance
and mean
of the a posteriori distribution [
15]:
where
is obtained with the DFT of
, and
is the equalized sequence of symbols in the frequency domain.
is obtained with the inverse DFT (IDFT) of
. The filter coefficient
and
are represented as
The mean and variance of the estimated a posteriori distribution are derived by (18)–(21). The marginal distribution
is estimated through the EP [
16,
17], and the mean and variance of
are given by
where
, and
is obtained with the IDFT of
. Subsequently, the estimated mean and variance of the marginal distribution obtained by (24) and (25) are fed back to (15), and the EP is executed until the maximum EP self-iteration is reached. On the basis of the estimated a posteriori probability of the transmitted symbols and the Bayesian principle, the extrinsic information
is calculated as
where
represents the
k-th modulation symbol of the
q-th code-word, and
and
are the sets of the
q-th code word of the modulation symbols of “0” and “1”, respectively. The extrinsic information
obtained in the equalization is de-interleaved and inputted into the Log-MAP decoder.
is outputted in terms of the Log-MAP criterion. With the maximum turbo iterations reached, code word
decoded by the decoder is expressed as
3.3. Bidirectional Combination
The combination of extrinsic information for the bidirectional turbo equalization mainly includes the two following methods, namely a mean combining scheme [
27] and a joint Gaussian scheme [
28]. The IFDTE and reversal IFDTE process the same received signal of the same channel only in a time-reversed order, and the IFDTE uses Gaussian distribution to approximate the true a posteriori distribution. The joint extrinsic information is treated to fit the joint Gaussian distribution [
29]. The bidirectional structure has two equalizations, namely forward and reversal equalizations [
30]. The combined extrinsic information fits the joint Gaussian distribution and is expressed as
where
,
represents the forward extrinsic information, and
represents the reversal extrinsic information through a time-reversal operation.
,
are the mean and variance of
,
,
are the mean and variance of
, and
is the correlation coefficient of forward and reversal extrinsic information and is given by
Given the probability distribution of the extrinsic information,
is calculated as
The combined extrinsic information
by inputting (28) into (31) is expressed as
where
,
, and the parameters of the forward and reversal equalization can be equivalent due to the same equalized symbols. Thus,
, and
.
, due to phase-shift modulation and the combined extrinsic information, can be rewritten as
3.4. A Posteriori Soft Decision for Iterative Channel Estimation
After the first iteration, the symbol of the a posteriori soft decision
of equalized symbol
can be obtained, similar to those in [
9,
14]:
where the a posteriori probability
is given by
In (32),
is calculated in (7), and
is the normalization factor. The marginal
is calculated as
With the continuous iteration of the turbo equalization, the reliability of the a posteriori soft feedback keeps increasing to accelerate the convergence of the estimation.
Thus, the iterative channel estimation in (9) after the first iteration can be rewritten as
where
with
.
3.5. Summary of the Proposed Algorithm
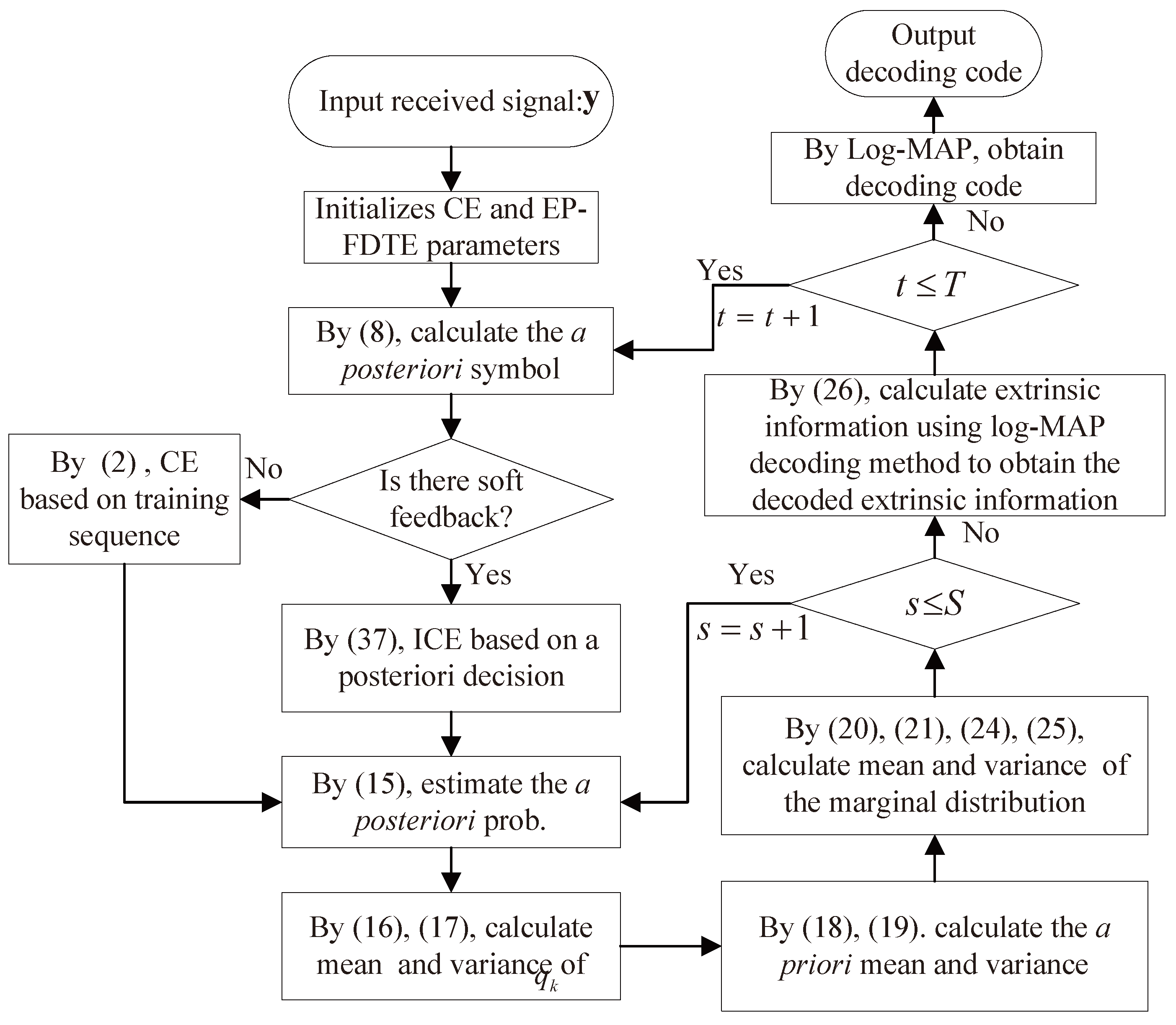
The proposed algorithm mainly includes three parts, namely low complexity iterative sparse channel estimation, the IFDTE, and the decoder. The flow chart of the proposed scheme is shown in
Figure 3 and depicted in
Table 1.
3.6. Analysis of the Computational Complexity
In this section, the complexity analysis and a comparison for the different turbo equalizations are provided. The complexity comes from four parts, namely the equalization filtering, symbol estimation, computation of the conditional mean, and variance [
9]. The main complexity is generally from equalization filtering. In the proposed IFDTE, the parallel block equalization filtering is made using FFT with significant efficient parallel convolution computation, thus improving the computational complexity significantly by reducing many multiplications in the filtering calculation of the TDTE. However, through the parallel implementation of the proposed block equalization filter, the proposed scheme occupies much more memory usage than the parallel FFT calculation, other than for the serial convolutional one, for the cost of fast computation. And the additional memory usage is mainly related to the degree of parallelism of the main convolutional filtering. In addition, the symbol estimation also occupies some complexity in the proposed IFDTE and it is moderate, as shown in
Table 2. Then, the complexity comparison can be analyzed as follows. Without a loss of generality, the computation complexity in terms of complex multiplication is adopted. Suppose the number of receiving hydrophones is
M, the maximum number of the EP self-iteration is
S, the length of FFT is
K, the length of the feedforward filter is
, the length of the feedbackward filter is
, the total length of the filter for the TDTE is
, and the length of the UWAC channel is
L.
From
Table 2, the complexity of the proposed IFDTE is approximately
S times higher than the FDDF-FDTE. This result is due to the self-iteration based on the EP in estimating the actual characteristic of the a posteriori distribution. However, the complexity of TDTE is proportional to the length of the filter and the UWAC channel. The UWAC channels are longer than 50 taps, the length of equalization is longer than that of channels [
2], and the number of self-iterations is smaller than 10. Therefore, the computational complexity of the LE and SDFE is larger than that of the IFDTE.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}