
Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review

 , ,
, ,  , and
, and
Abstract
:1. Introduction
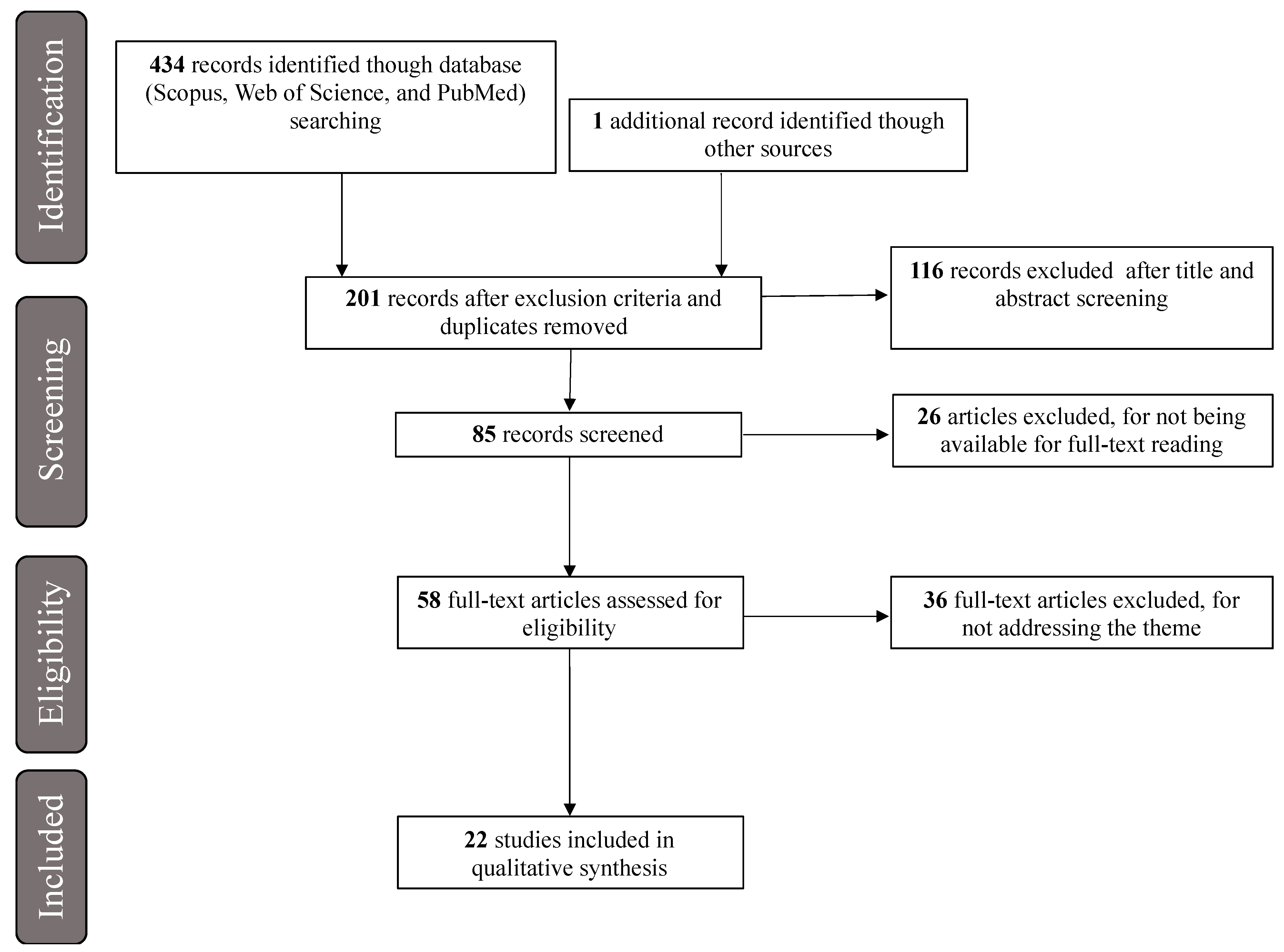
2. Method and Materials
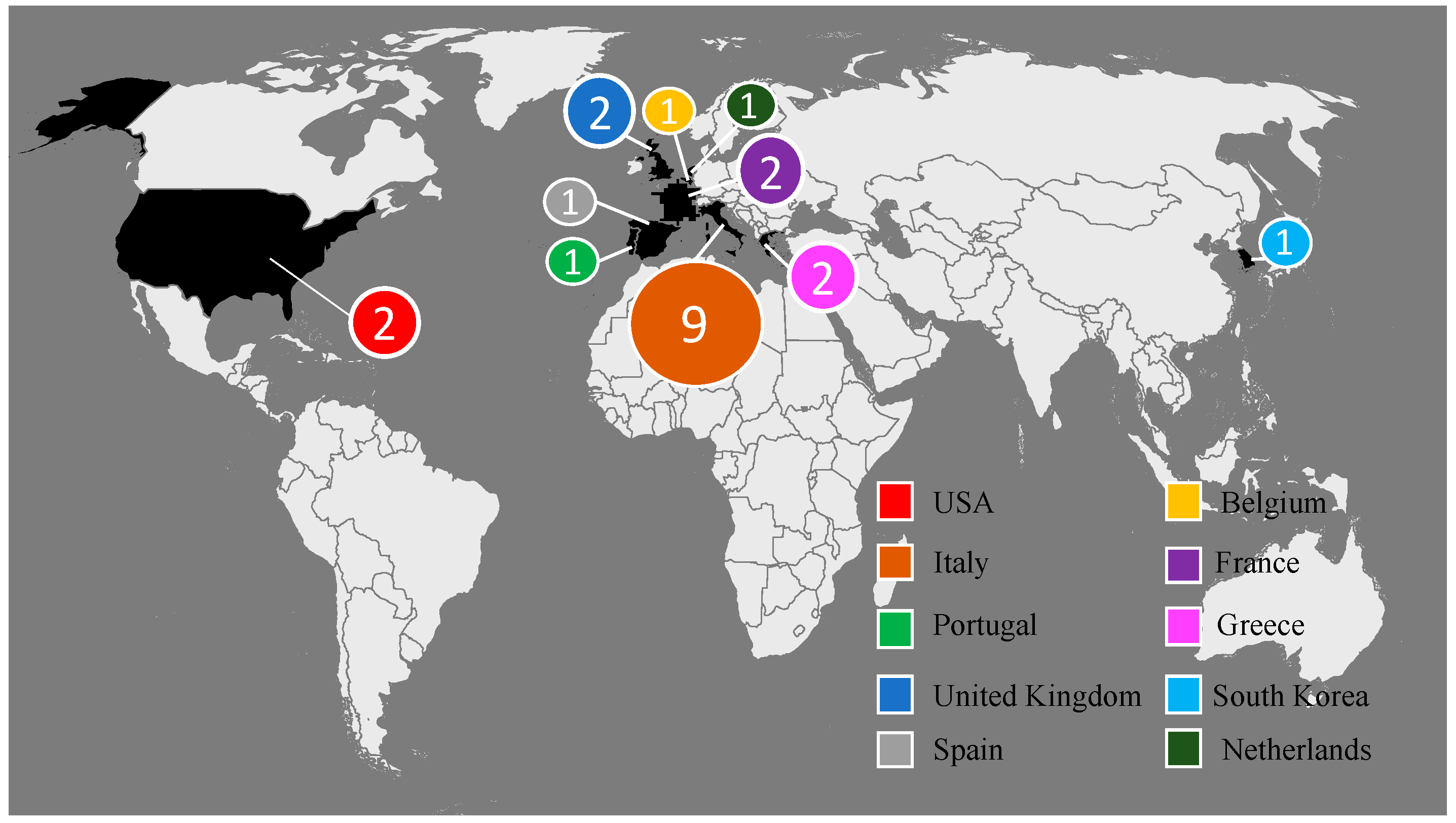
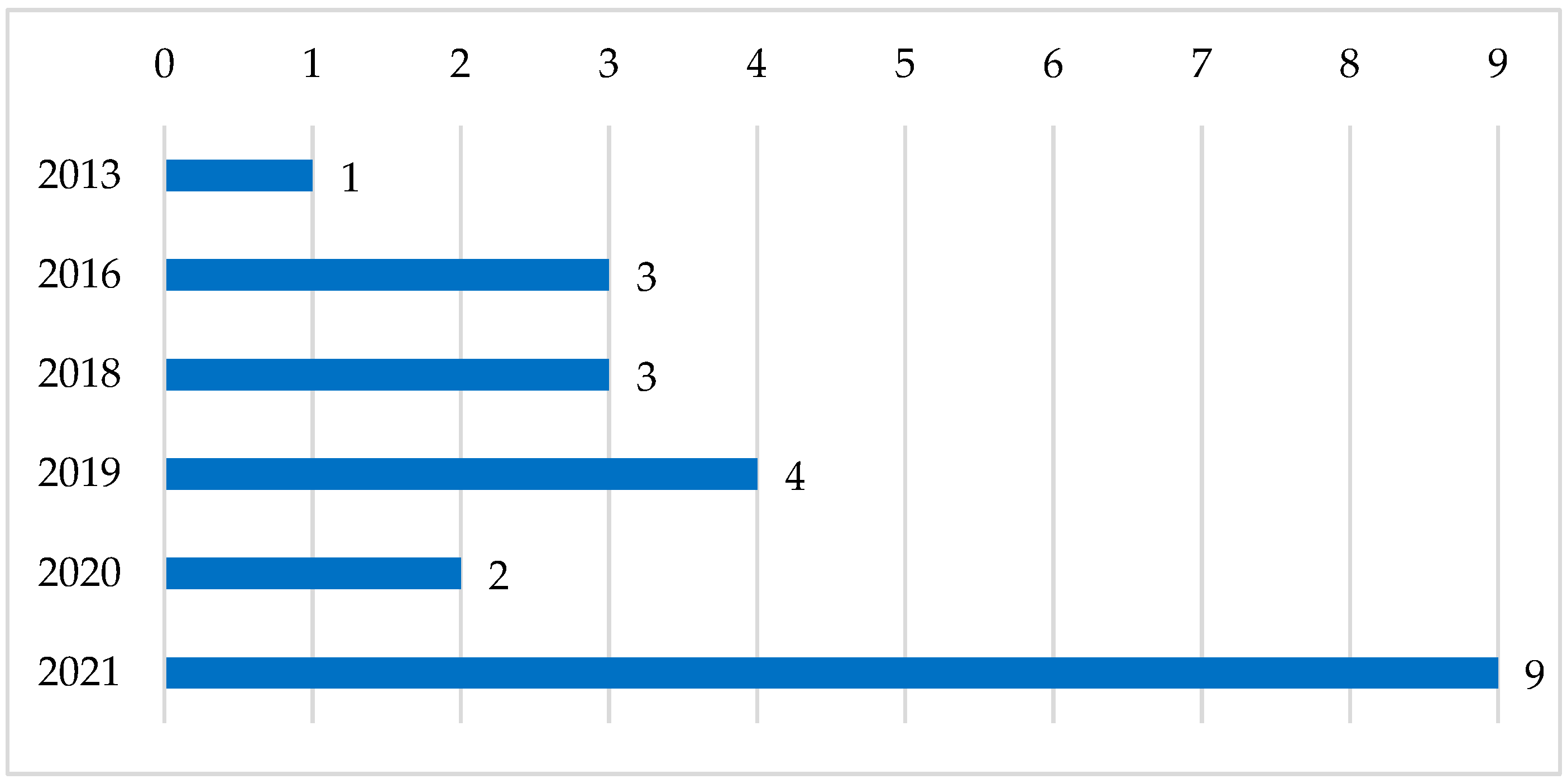
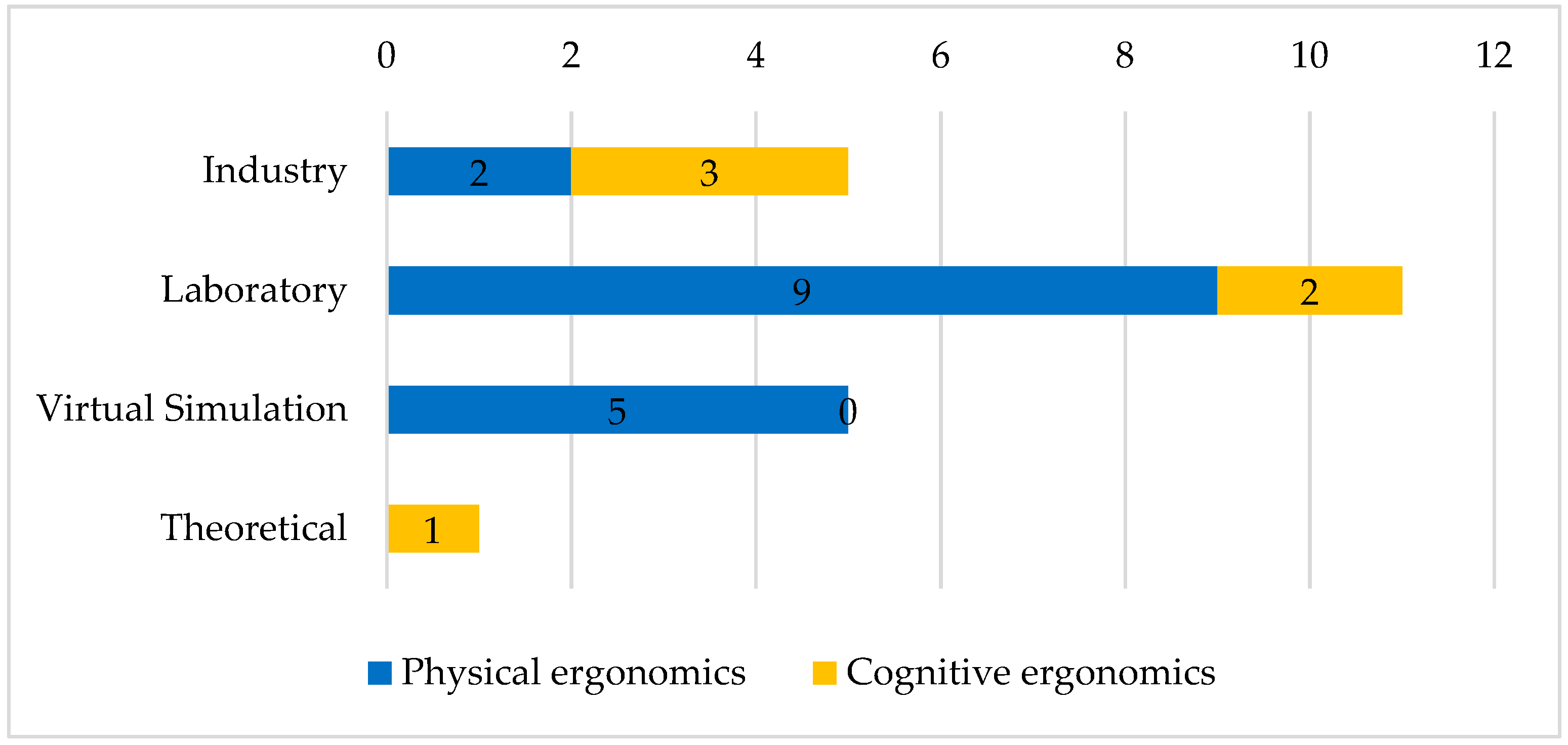
3. Results and Discussion
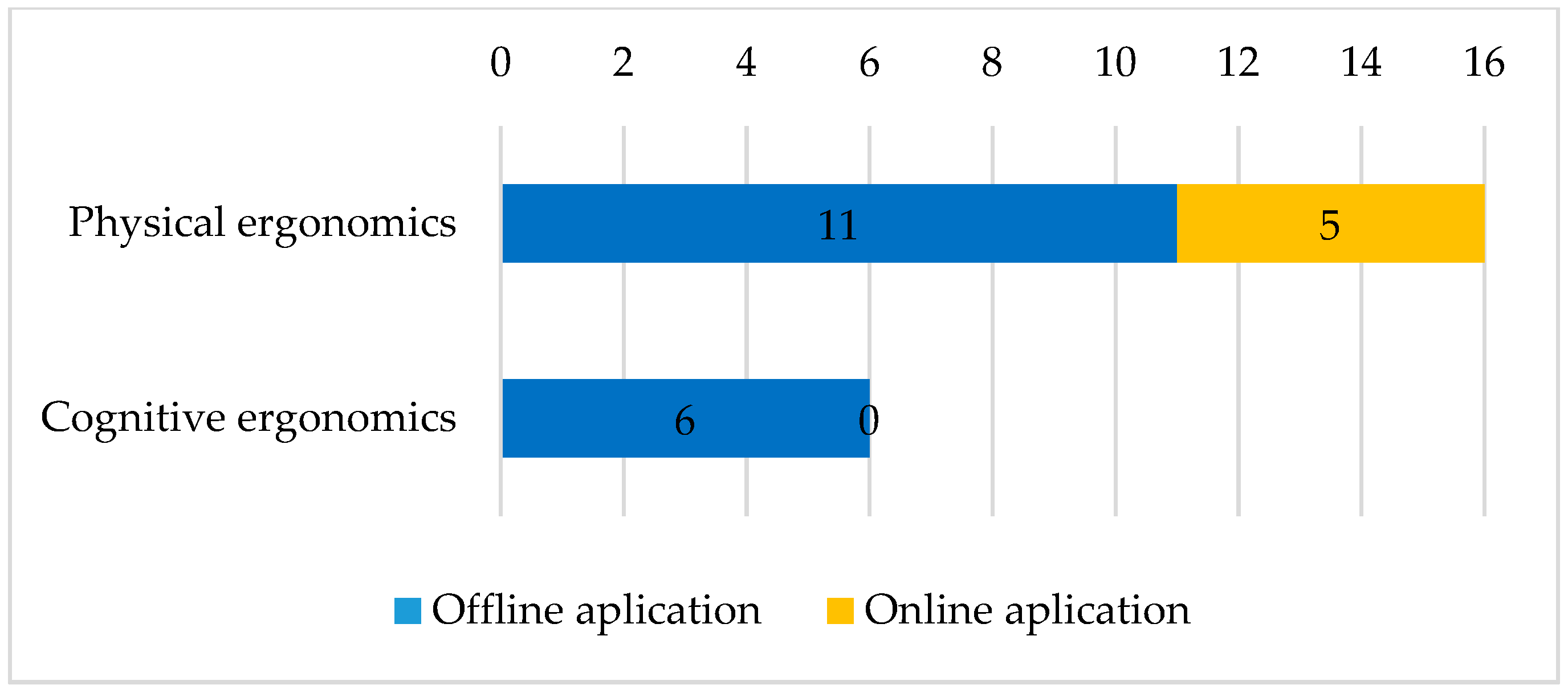
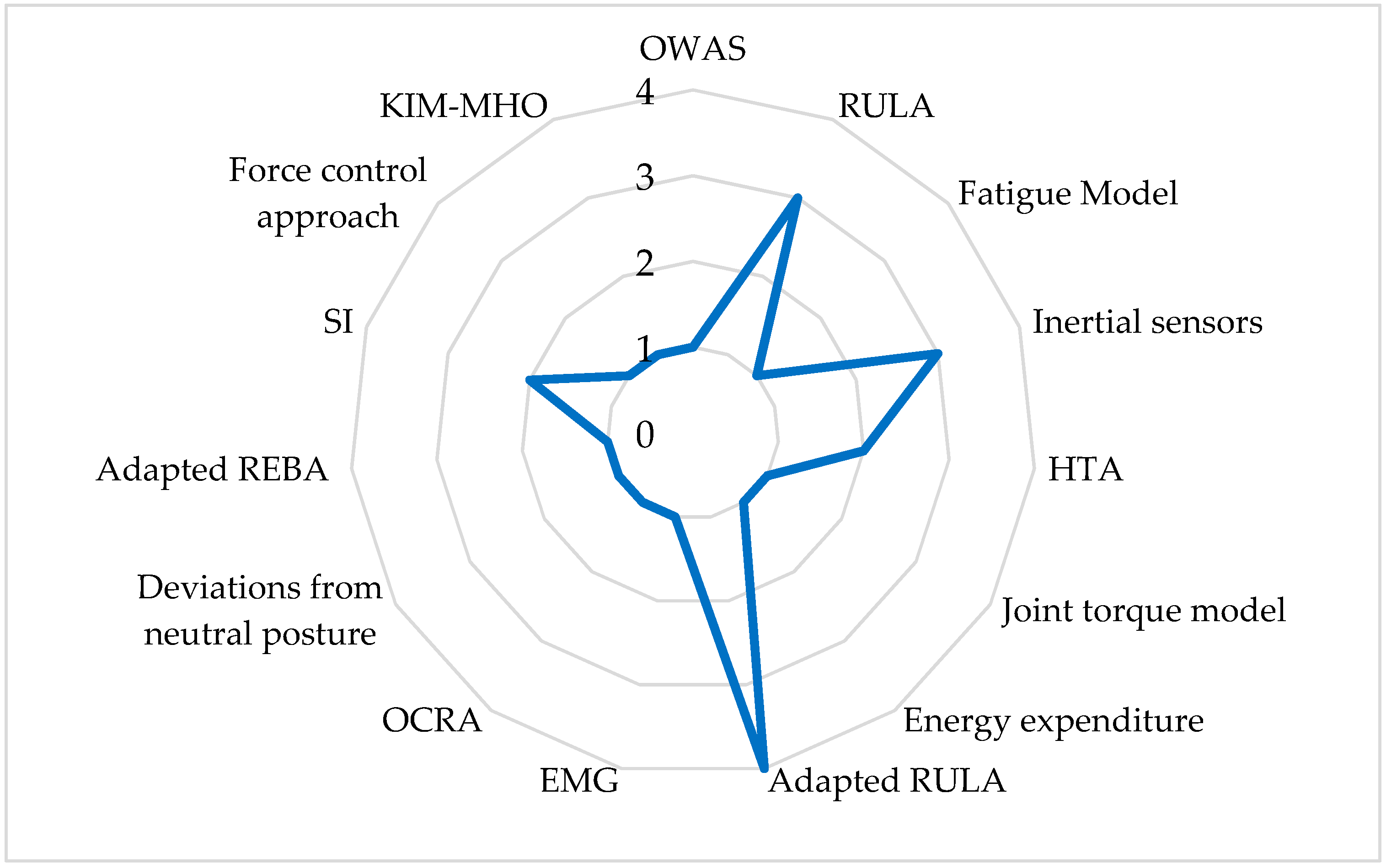
3.1. Physical Ergonomics
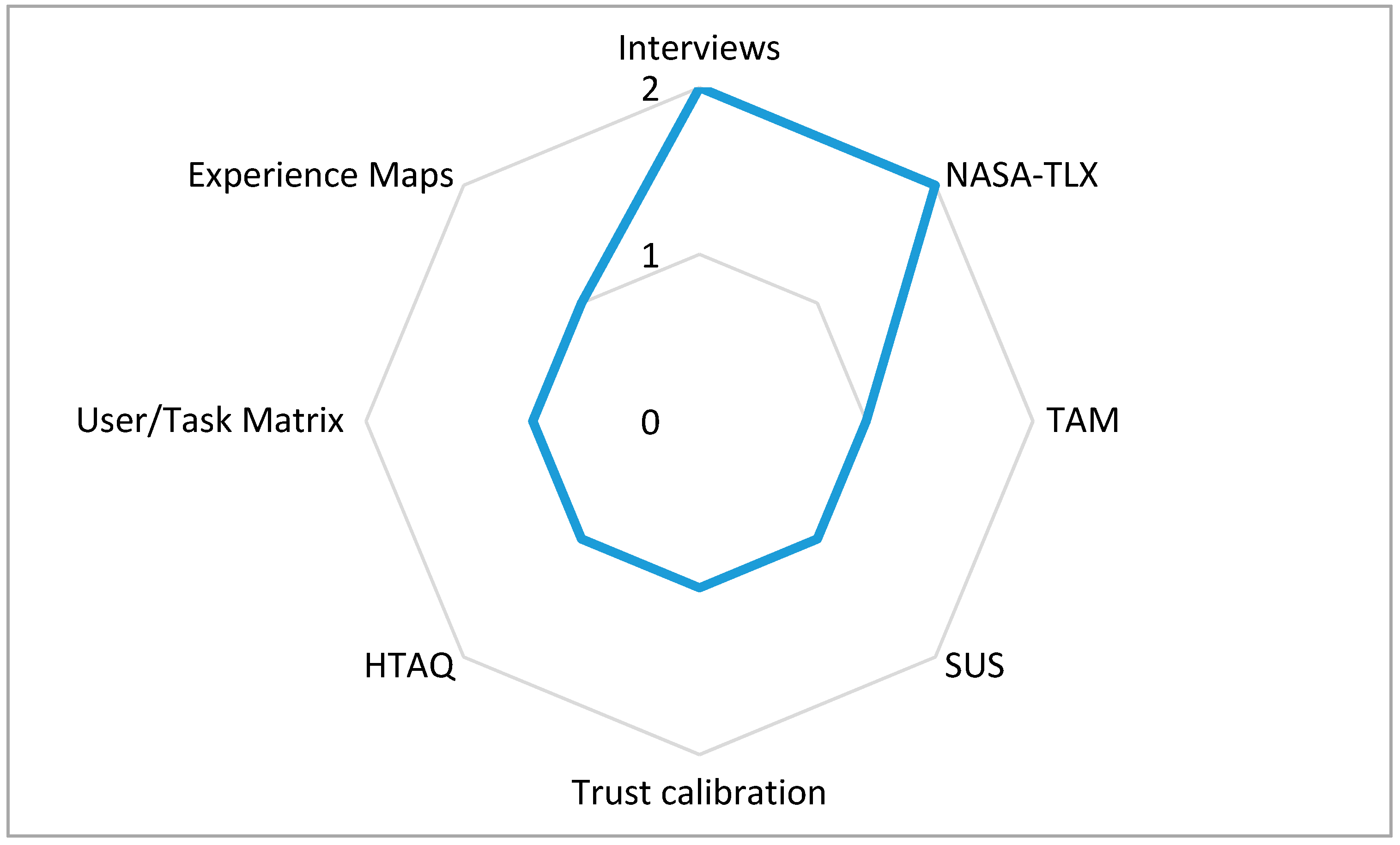
3.2. Cognitive Ergonomics
4. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Lorenzini, M.; Kim, W.; Momi, E.D.; Ajoudani, A. A New Overloading Fatigue Model for Ergonomic Risk Assessment with Application to Human-Robot Collaboration. In Proceedings of the 2019 International Conference on Robotics and Automation, ICRA 2019, Montréal, QC, Canada, 20–24 May 2019; Institute of Electrical and Electronics Engineers Inc., HRI2 Lab, Istituto Italiano di Tecnologia: Genoa, Italy, 2019; pp. 1962–1968. [Google Scholar] [CrossRef] [Green Version]
- Maurice, P.; Padois, V.; Measson, Y.; Bidaud, P. Human-Oriented Design of Collaborative Robots. Int. J. Ind. Ergon. 2017, 57, 88–102. [Google Scholar] [CrossRef] [Green Version]
- Canjuga, M.; Hammig, O.; Bauer, G.F.; Laubli, T. Correlates of Short- and Long-Term Absence Due to Musculoskeletal Disorders. Occup. Med. 2010, 60, 358–361. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- El Makrini, I.; Merckaert, K.; De Winter, J.; Lefeber, D.; Vanderborght, B. Task Allocation for Improved Ergonomics in Human-Robot Collaborative Assembly. Interact. Stud. Soc. Behav. Commun. Biol. Artif. Syst. 2019, 20, 102–133. [Google Scholar] [CrossRef]
- Ranavolo, A.; Ajoudani, A.; Cherubini, A.; Bianchi, M.; Fritzsche, L.; Iavicoli, S.; Sartori, M.; Silvetti, A.; Vanderborght, B.; Varrecchia, T.; et al. The Sensor-Based Biomechanical Risk Assessment at the Base of the Need for Revising of Standards for Human Ergonomics. Sensors 2020, 20, 5750. [Google Scholar] [CrossRef]
- Parra, P.S.; Calleros, O.L.; Ramirez-Serrano, A. Human-Robot Collaboration Systems: Components and Applications. Int. Conf. Control. Dyn. Syst. Robot. 2020, 150, 1–9. [Google Scholar] [CrossRef]
- Kim, W.; Lorenzini, M.; Balatti, P.; Nguyen, P.D.H.; Pattacini, U.; Tikhanoff, V.; Peternel, L.; Fantacci, C.; Natale, L.; Metta, G.; et al. Adaptable Workstations for Human-Robot Collaboration: A Reconfigurable Framework for Improving Worker Ergonomics and Productivity. IEEE Robot. Autom. Mag. 2019, 26, 14–26. [Google Scholar] [CrossRef] [Green Version]
- Pearce, M.; Mutlu, B.; Shah, J.; Radwin, R. Optimizing Makespan and Ergonomics in Integrating Collaborative Robots into Manufacturing Processes. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1772–1784. [Google Scholar] [CrossRef]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging Research Fields in Safety and Ergonomics in Industrial Collaborative Robotics: A Systematic Literature Review. Robot. Comput. Integr. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Charalambous, G.; Fletcher, S.; Webb, P. The Development of a Scale to Evaluate Trust in Industrial Human-Robot Collaboration. Int. J. Soc. Robot. 2016, 8, 193–209. [Google Scholar] [CrossRef]
- Brun, L.; Wioland, L. Prevention of Occupational Risks Related to the Human-Robot Collaboration. Adv. Intell. Syst. Comput. 2021, 1253, 441–446. [Google Scholar] [CrossRef]
- Kim, W.; Peternel, L.; Lorenzini, M.; Babič, J.; Ajoudani, A. A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools. Robot. Comput. Integr. Manuf. 2021, 68. [Google Scholar] [CrossRef]
- Hopko, S.K.; Khurana, R.; Mehta, R.K.; Pagilla, P.R. Effect of Cognitive Fatigue, Operator Sex, and Robot Assistance on Task Performance Metrics, Workload, and Situation Awareness in Human-Robot Collaboration. IEEE Robot. Autom. Lett. 2021, 6, 3049–3056. [Google Scholar] [CrossRef]
- Colim, A.; Faria, C.; Cunha, J.; Oliveira, J.; Sousa, N.; Rocha, L.A. Physical Ergonomic Improvement and Safe Design of an Assembly Workstation through Collaborative Robotics. Safety 2021, 7, 14. [Google Scholar] [CrossRef]
- Salunkhe, O.; Stensöta, O.; Åkerman, M.; Berglund, Å.F.; Alveflo, P.A. Assembly 4.0: Wheel Hub Nut Assembly Using a Cobot. IFAC Pap. 2019, 52, 1632–1637. [Google Scholar] [CrossRef]
- Pini, F.; Ansaloni, M.; Leali, F. Evaluation of Operator Relief for an Effective Design of HRC Workcells. In Proceedings of the 21st IEEE International Conference on Emerging Technologies and Factory Automation, ETFA 2016, Berlin, Germany, 6–9 September 2016; Institute of Electrical and Electronics Engineers Inc.: Department of Engineering “Enzo Ferrari”, University of Modena and Reggio Emilia: Vivarelli, Italy, 2016. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Crosnier, A.; Lasnier, A.; Fraisse, P. Collaborative Manufacturing with Physical Human-Robot Interaction. Robot. Comput. Integr. Manuf. 2016, 40, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Shafti, A.; Ataka, A.; Lazpita, B.U.; Shiva, A.; Wurdemann, H.A.; Althoefer, K. Real-Time Robot-Assisted Ergonomics. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1975–1981. [Google Scholar]
- Colim, A.; Morgado, R.; Carneiro, P.; Costa, N.; Faria, C.; Sousa, N.; Rocha, L.A.; Arezes, P. Lean Manufacturing and Ergonomics Integration: Defining Productivity and Wellbeing Indicators in a Human–Robot Workstation. Sustainability 2021, 13, 1931. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on Human–Robot Collaboration in Industrial Settings: Safety, Intuitive Interfaces and Applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Müller, R.; Vette, M.; Scholer, M. Robot Workmate: A Trustworthy Coworker for the Continuous Automotive Assembly Line and Its Implementation. Procedia CIRP 2016, 44, 263–268. [Google Scholar] [CrossRef] [Green Version]
- Dimitropoulos, N.; Togias, T.; Zacharaki, N.; Michalos, G.; Makris, S. Seamless Human–Robot Collaborative Assembly Using Artificial Intelligence and Wearable Devices. Appl. Sci. 2021, 11, 5699. [Google Scholar] [CrossRef]
- Vega-Barbas, M.; Diaz-Olivares, J.A.; Lu, K.; Forsman, M.; Seoane, F.; Abtahi, F. P-Ergonomics Platform: Toward Precise, Pervasive, and Personalized Ergonomics Using Wearable Sensors and Edge Computing. Sensors 2019, 19, 1225. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tranfield, D.; Denyer, D.; Palminder, S. Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.T.; Altman, D.G. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement. PLoS Med. 2009, 6, 339. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duarte, J.; Torres Marques, A.; Santos Baptista, J. Occupational Accidents Related to Heavy Machinery: A Systematic Review. Safety 2021, 7, 21. [Google Scholar] [CrossRef]
- Palomba, I.; Gualtieri, L.; Rojas, R.; Rauch, E.; Vidoni, R.; Ghedin, A. Mechatronic Re-Design of a Manual Assembly Workstation into a Collaborative One for Wire Harness Assemblies. Robotics 2021, 10, 43. [Google Scholar] [CrossRef]
- Gualtieri, L.; Palomba, I.; Merati, F.A.; Rauch, E.; Vidoni, R. Design of Human-Centered Collaborative Assembly Workstations for the Improvement of Operators’ Physical Ergonomics and Production Efficiency: A Case Study. Sustainbility 2020, 12, 3606. [Google Scholar] [CrossRef]
- Zanchettin, A.M.; Lotano, E.; Rocco, P. Collaborative Robot Assistant for the Ergonomic Manipulation of Cumbersome Objects. IEEE Int. Conf. Intell. Robot. Syst. 2019, 6729–6734. [Google Scholar] [CrossRef]
- Heydaryan, S.; Bedolla, J.S.; Belingardi, G. Safety Design and Development of a Human-Robot Collaboration Assembly Process in the Automotive Industry. Appl. Sci. 2018, 8, 344. [Google Scholar] [CrossRef] [Green Version]
- Maurice, P.; Measson, Y.; Padois, V.; Bidaud, P. Assessment of Physical Exposure to Musculoskeletal Risks in Collaborative Robotics Using Dynamic Simulation. CISM Int. Cent. Mech. Sci. Courses Lect. 2013, 544, 325–332. [Google Scholar] [CrossRef] [Green Version]
- Rossato, C.; Pluchino, P.; Cellini, N.; Jacucci, G.; Spagnolli, A.; Gamberini, L. Facing with Collaborative Robots: The Subjective Experience in Senior and Younger Workers. Cyberpsychol. Behav. Soc. Netw. 2021, 24, 349–356. [Google Scholar] [CrossRef]
- Prati, E.; Peruzzini, M.; Pellicciari, M.; Raffaeli, R. How to Include User EXperience in the Design of Human-Robot Interaction. Robot. Comput. Integr. Manuf. 2021, 68, 102072. [Google Scholar] [CrossRef]
- Sadrfaridpour, B.; Saeidi, H.; Wang, Y. An Integrated Framework for Human-Robot Collaborative Assembly in Hybrid Manufacturing Cells. In Proceedings of the 2016 IEEE International Conference on Automation Science and Engineering, CASE 2016, Fort Worth, TX, USA, 21–25 August 2016; IEEE Computer Society: Department of Mechanical Engineering, Clemson University: Clemson, SC, USA, 2016; pp. 462–467. [Google Scholar] [CrossRef]
- Charalambous, G.; Fletcher, S.; Webb, P. Development of a Human Factors Roadmap for the Successful Implementation of Industrial Human-Robot Collaboration. In Proceedings of the International Conference on Human Aspects of Advanced Manufacturing, HAAMAHA 2016, Orlando, FL, USA, 27–31 July 2016; Springer: London, UK, 2016; pp. 195–206. [Google Scholar] [CrossRef] [Green Version]
- Liau, Y.Y.; Ryu, K. Task Allocation in Human-Robot Collaboration (HRC) Based on Task Characteristics and Agent Capability for Mold Assembly. Procedia Manuf. 2020, 51, 179–186. [Google Scholar] [CrossRef]
- Ottogalli, K.; Rosquete, D.; Rojo, J.; Amundarain, A.; María Rodríguez, J.; Borro, D. Virtual Reality Simulation of Human-Robot Coexistence for an Aircraft Final Assembly Line: Process Evaluation and Ergonomics Assessment. Int. J. Comput. Integr. Manuf. 2021, 34, 975–995. [Google Scholar] [CrossRef]
- Lambrechts, W.; Klaver, J.S.; Koudijzer, L.; Semeijn, J. Human Factors Influencing the Implementation of Cobots in High Volume Distribution Centres. Logistics 2021, 5, 32. [Google Scholar] [CrossRef]
- Beck, S.; Bergenholtz, C.; Bogers, M.; Brasseur, T.M.; Conradsen, M.L.; Di Marco, D.; Distel, A.P.; Dobusch, L.; Dörler, D.; Effert, A.; et al. The Open Innovation in Science Research Field: A Collaborative Conceptualisation Approach. Ind. Innov. 2020, 1–50. [Google Scholar] [CrossRef]
- Kim, W.; Lee, J.; Peternel, L.; Tsagarakis, N.; Ajoudani, A. Anticipatory Robot Assistance for the Prevention of Human Static Joint Overloading in Human-Robot Collaboration. IEEE Robot. Autom. Lett. 2018, 3, 68–75. [Google Scholar] [CrossRef]
- International Ergonomics Association. What is Ergonomics? Available online: https://iea.cc/what-is-ergonomics/ (accessed on 3 June 2021).
- David, G.C. Ergonomic Methods for Assessing Exposure to Risk Factors for Work-Related Musculoskeletal Disorders. Occup. Med. 2005, 55, 190–199. [Google Scholar] [CrossRef] [Green Version]
- Colim, A.; Faria, C.; Braga, A.C.; Sousa, N.; Carneiro, P.; Costa, N.; Arezes, P. Towards an Ergonomic Assessment Framework for Industrial Assembly Workstations—A Case Study. Appl. Sci. 2020, 10, 3048. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors and Year | Objective | Subjects | Main Results |
|---|---|---|---|
| (Colim et al., 2021) [19] | Assessment of industrial implementation of a collaborative robotic workstation for assembly tasks. | n = 4 | WMSD risk decrease in all performed observational methods in the collaborative workstation. |
| (Palomba et al., 2021) [27] | Description of technical realization of a collaborative workstation developed for a real-industry case study. | n = 1 | Improvement of working conditions, since Rapid Upper Limb Assessment (RULA) results, showed a reduction of 50% for the left part of the body and 57% for the right part of the body when compared with the manual workstation. |
| (Ottogalli et al., 2021) [37] | Development of Virtual Reality simulation environment to address performance and worker ergonomics. | N.A. | The results show that most of the new proposed strategies improve the assembly time, worker cost, or ergonomics of the process. |
| (Dimitropoulos et al., 2021) [22] * | Development of an AI-based system that can capture the operator and environment status and provide customized operator support from the robot side for shared tasks, automatically adapting to the operator’s needs and preferences | n = 5 | Possible amelioration of ergonomic factors in 80% of the samples. |
| (Kim et al., 2021) [12] * | Development of novel HRC control method that can guide human co-workers to more ergonomic working configurations during dexterous operations. | n = 10 | Muscle arm activity in some tested configurations resulted in the lower effort. This approach only considered muscles of the arm. |
| (Gualtieri et al., 2020) [28] | Design of a collaborative workstation to improve the operators’ physical ergonomics while keeping or increasing the level of productivity. | n = 2 | Improvement of conditions in terms of manual handlings. The overall Occupational Repetitive Actions (OCRA) and RULA values were reduced. |
| (Liau & Ryu, 2020) [36] | Development and validation of a framework for task allocation for a workstation composed of one human and two collaborative robots. | N.A. | The average RULA score for the manual operation was 4.54. The introduction of two robot collaboration in the operation reduced the WMSD risk level on the human to 2.31. |
| (Shafti et al., 2020) [18] * | Development and validation of a novel approach in HRC driven by ergonomics. | n = 5 | Successful real-time robot-aided posture improvement. |
| (Lorenzini et al., 2019) [1] * | Development of a whole-body and subject-specific model to identify an individual’s fatigue progression over time while performing repetitive tasks involving light payloads. | n = 1 | When fatigue excessed a threshold in any joint, a body posture optimization was triggered, guided by the collaborative robot assistance, and the accumulation of further fatigue was thus avoided |
| (Zanchettin et al., 2019) [29] | Development of a motion control algorithm for a robotic manipulator to perform the gross of the motion, thus limiting the amplitude and the range of motion of the operator to perform an achieved task. | n = 19 | Lower exposition to WMSD and, in turn, no substantial modification in the quality of the production. |
| (Makrini et al., 2019) [4] | Development of a framework for task allocation in HRC assembly. | N.A. | The physical workload is set at the desired level. |
| (Pearce et al., 2018) [8] | Presentation of a framework for agent allocation (human or robot) minimizing task completion time and human physical “strain.” | n = 6 | Improvement of physical stress in some tasks. The best results happen for tasks where parallel work is enabled. |
| (Heydaryan et al., 2018) [30] | Development of human-robot collaboration workstation for the case of an automotive brake disc assembly | N.A. | HRC solution improves human ergonomics considerably and reduces the operator injury risk. |
| (Kim et al., 2018) [40] * | Development of a real-time technique for reducing the overloading joint torque in humans while performing heavy manipulation tasks with robots. | n = 1 | Reduction of the shoulder and elbow joint torques in 40% to 50% more when compared to an initial experiment in which the robot trajectories were not optimized along the x-axis. |
| (Pini et al., 2016) [16] | Development of an approach to evaluate the operator relief, based on a modified model for the fatigue evaluation. | N.A. | Reduction of RULA scores for the HRC solution. Reduction of fatigue level of the operator in 42% when compared to the manual situation. |
| (Maurice et al., 2013) [31] | Development of a dynamic simulation framework to model the performing of a task jointly by a virtual manikin and a robot. | N.A. | One of the robots induces a significant decrease in the manikin efforts. The other one leads to a situation that is worse than without assistance. |
| Authors | Objective | Subjects | Main Results |
|---|---|---|---|
| (Brun & Wioland, 2021) [11] | Investigation of the consequences of Human-Robot Collaboration on the operator’s activity and his feelings | n = 8 | All workers agreed that the collaborative system impacts the organization. Most of the workers (75%), also agreed that the implementation of collaborative robots improves working conditions and confidence, gives support and relief and decreases stress and fatigue. |
| (Lambrechts et al., 2021) [38] | Investigation of implementation the influence of human factors on the implementation of Cobots in assembly lines. | n = 4 | The results demonstrate the importance of planning the Cobots implementation process in phases, since employees are hesitant or resistant to the change due to a lack of information, experience, and communication. |
| (Rossato et al., 2021) [32] | Investigation of the extent to which users’ age (i.e., adults, senior workers) and cobot control modality (i.e., manual, tablet) affect the acceptance, UX, usability, and task load related to cobot usage. | n = 20 | Workers of different ages viewed the Cobot not as a replacement but as a supportive and independent ‘‘colleague’’ who is pleasant, attractive, and satisfying to interact with. |
| (Prati et al., 2021) [33] | Development a user experience (UX)-oriented structured method to investigate the human-robot dialogue to map the interaction with robots during the execution of shared tasks. | n = 1 | Results demonstrated the validity of the proposed tools to understand the human-robot interaction, describe the communication issues, and define the main interface features to support the following interface design activity. |
| (Charalambous et al., 2016) [35] | Development of Human Factors roadmap for the successful implementation of industrial HRC. | N.A. | The roadmap provides propositions in a guiding framework for practitioners to assist appropriate trust calibration to the robotic teammate, through a Training programme and Operator empowerment. |
| (Sadrfaridpour et al., 2016) [34] | Development of a trust-based integrated scheme for HRC in manufacturing to take into account human-in-the-loop considerations at the psychological levels. | n = 5 | The human-perceived task load is lowest in the trust-based integrated framework. Comparison of human perceived task load and subjective trust in the robot reveals that the human worker experiences a better collaboration during the trust-based integrated scheme. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cardoso, A.; Colim, A.; Bicho, E.; Braga, A.C.; Menozzi, M.; Arezes, P. Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety 2021, 7, 71. https://0-doi-org.brum.beds.ac.uk/10.3390/safety7040071
Cardoso A, Colim A, Bicho E, Braga AC, Menozzi M, Arezes P. Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety. 2021; 7(4):71. https://0-doi-org.brum.beds.ac.uk/10.3390/safety7040071
Chicago/Turabian StyleCardoso, André, Ana Colim, Estela Bicho, Ana Cristina Braga, Marino Menozzi, and Pedro Arezes. 2021. "Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review" Safety 7, no. 4: 71. https://0-doi-org.brum.beds.ac.uk/10.3390/safety7040071