Exploiting OLTC and BESS Operation Coordinated with Active Network Management in LV Networks


 ,
,
Abstract
:1. Introduction
2. Related Works and Contributions
- Advances an analytical DMS framework for the energy management and scheduling of operation of unbalanced distribution networks with increased integration of DERs. The tool is capable of deriving control actions and schedules for flexible DER and the OLTC subjected to multiple operational constraints such as congestion management, phase balancing, and voltage regulation. Furthermore, optional objective terms might be opted among the minimization of operational costs or minimization of flexibility activation costs and minimization of active power losses.
- The proposed DMS tool is extended for planning purposes such as to propose efficient sizing and placement of BESS solutions (i.e., distributed or centralized).
- An analytical study is conducted to compare the alternatives among OLTC, BESS, active network management, or their coordinated operation for scenarios with increased DER integration.
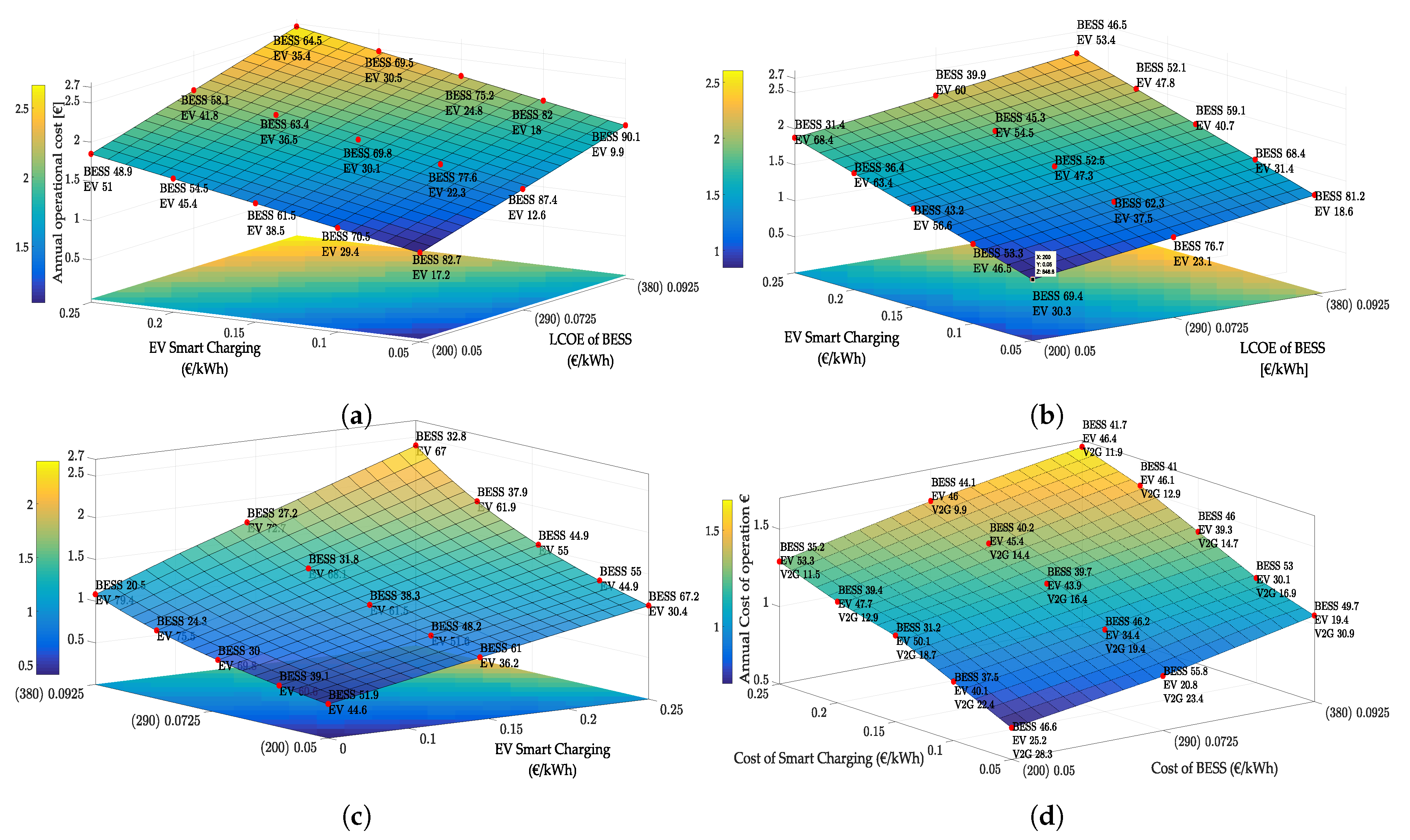
- A sensitivity analysis for coordinated operation between BESS and EVs exploring variable base pricing for the BESS investment and the variable price of EV flexibility.
3. Formulation of Coordinated Active Network Management Tool
3.1. Interior-Point Algorithm
3.2. Multi-Objective MACOPF Treated with a Weighted Sum Method
3.3. Grid Constraints
3.3.1. Power Flows
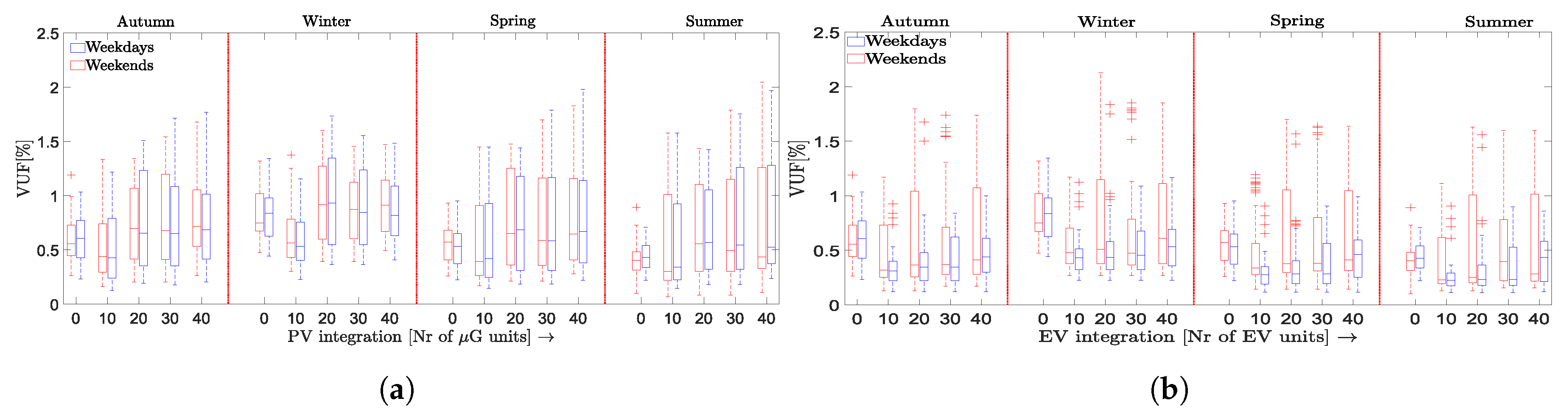
3.3.2. Voltage Unbalances
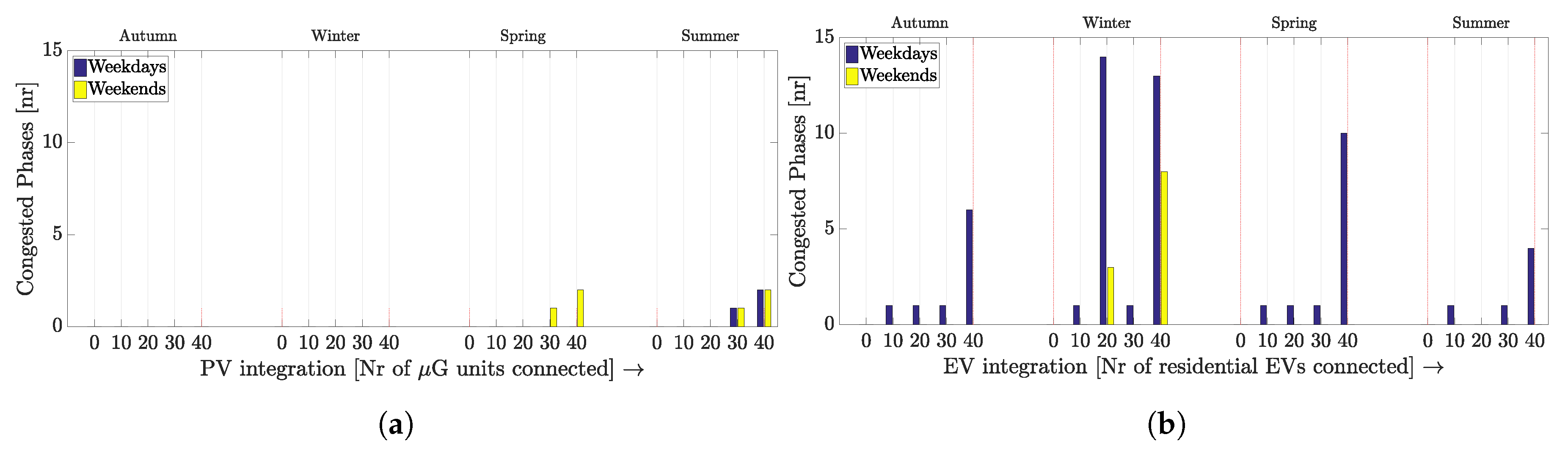
3.3.3. Line Congestion Management
3.4. OLTC and DER Operational Model
3.4.1. On-Load Tap Changer (OLTC) Model
| Algorithm 1: OLTC round-off —rule based on [50]; in this study, . |
 |
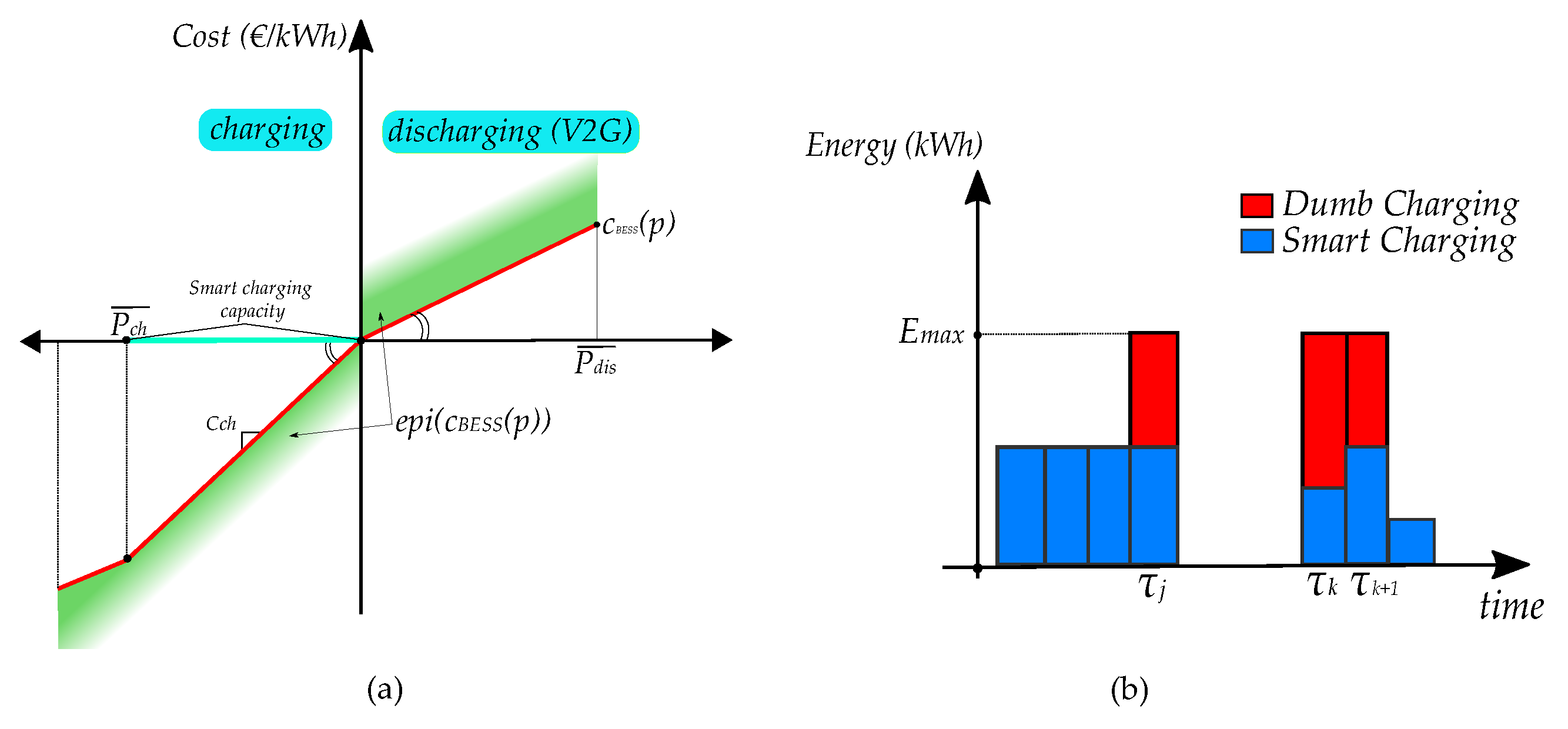
3.4.2. Battery Energy Storage System (BESS)
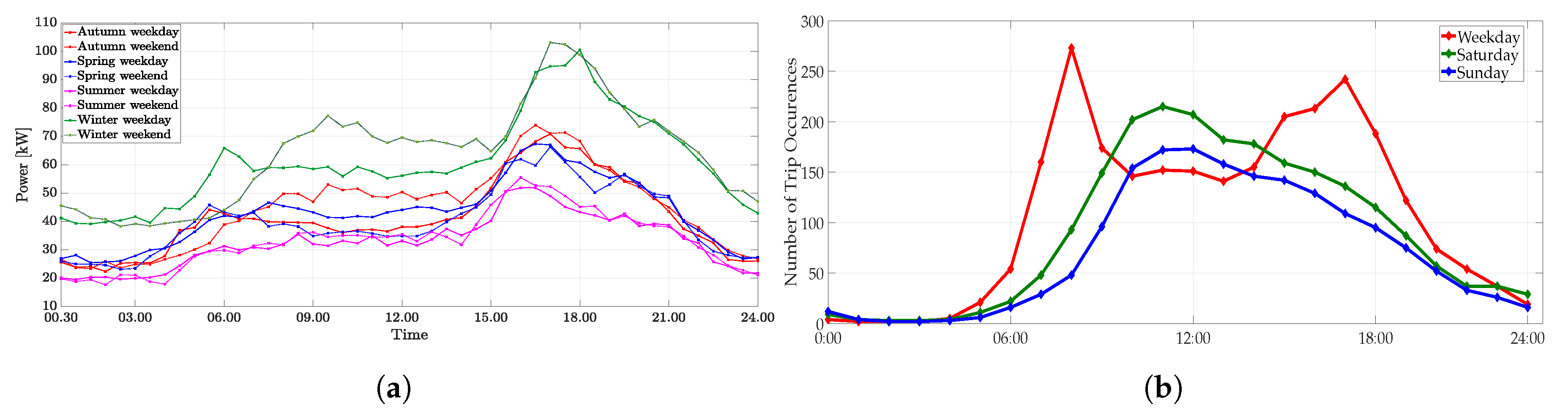
3.4.3. Electric Vehicles
3.5. Optimal Sizing and Placement of BESS
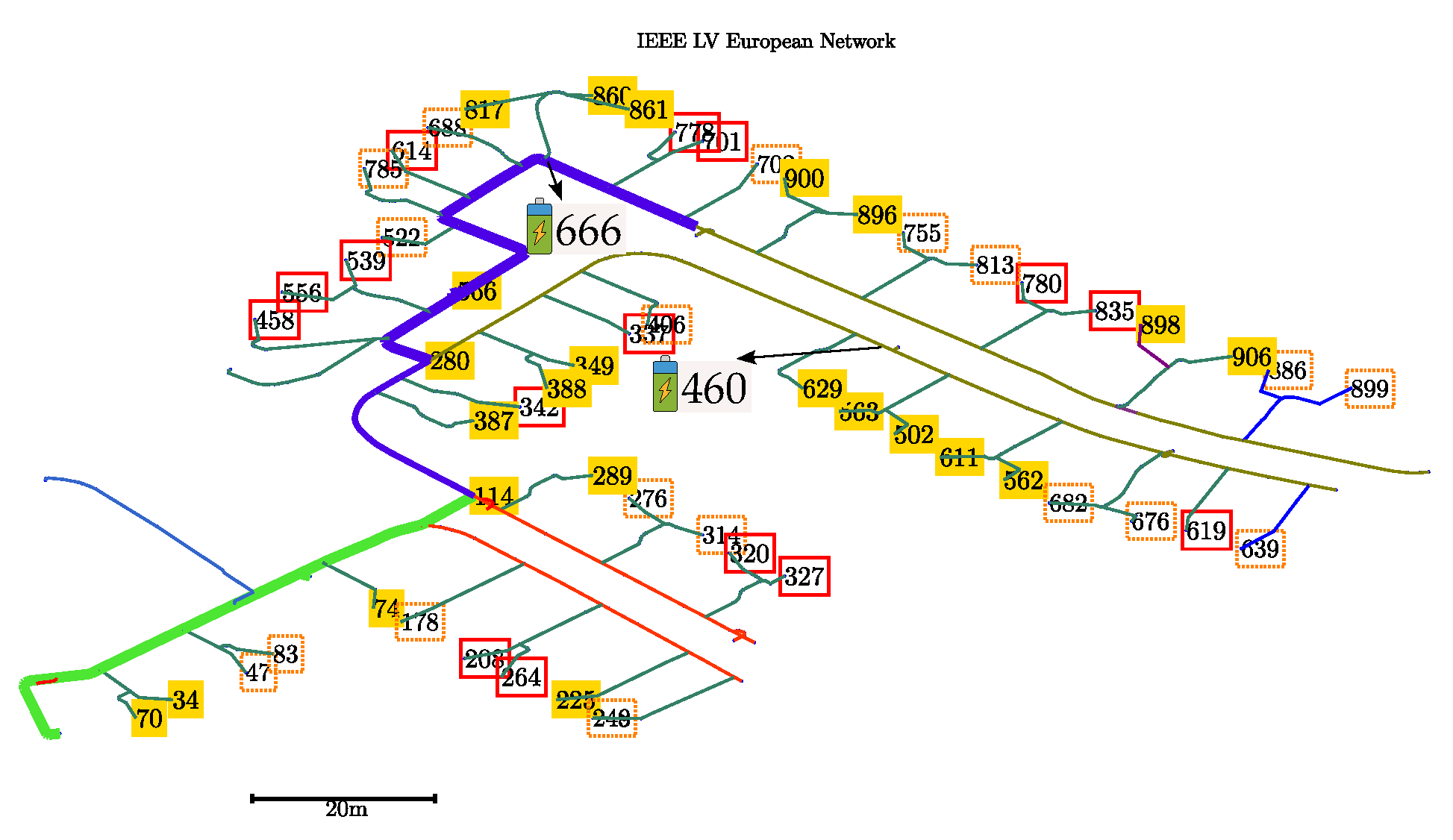
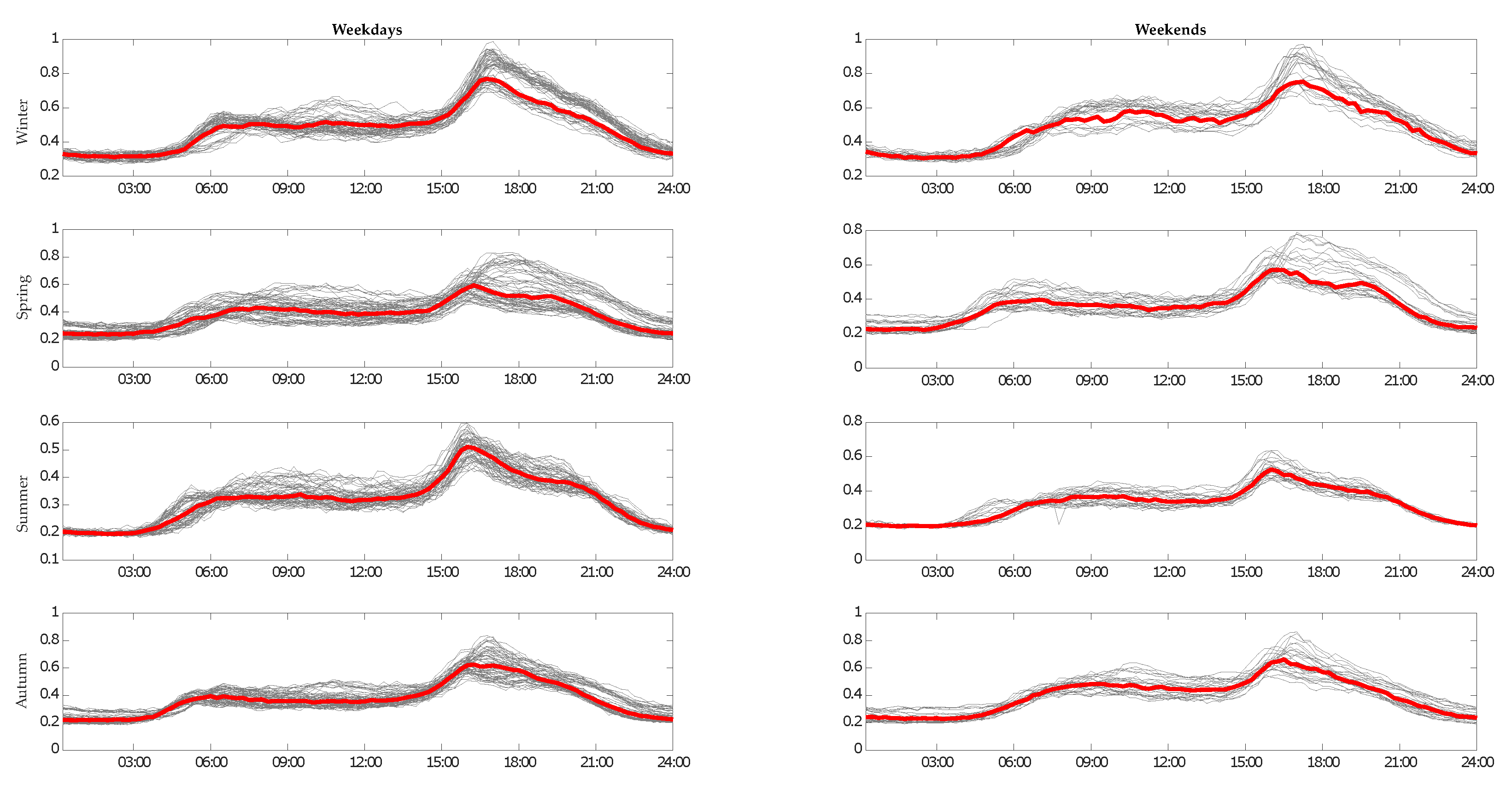
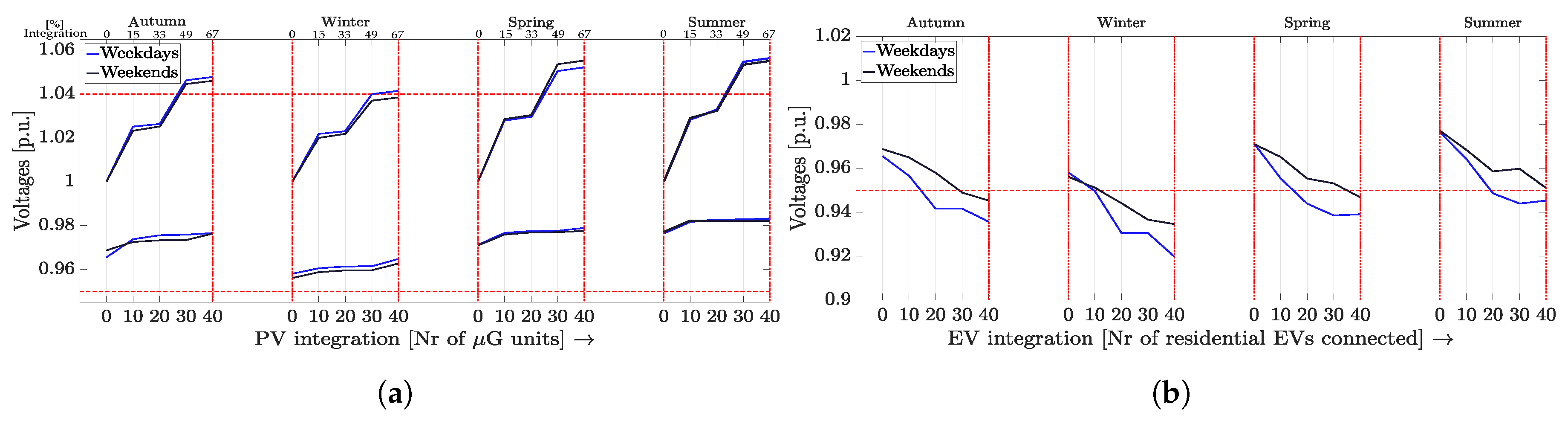
4. Case Study Synopsis
4.1. Results
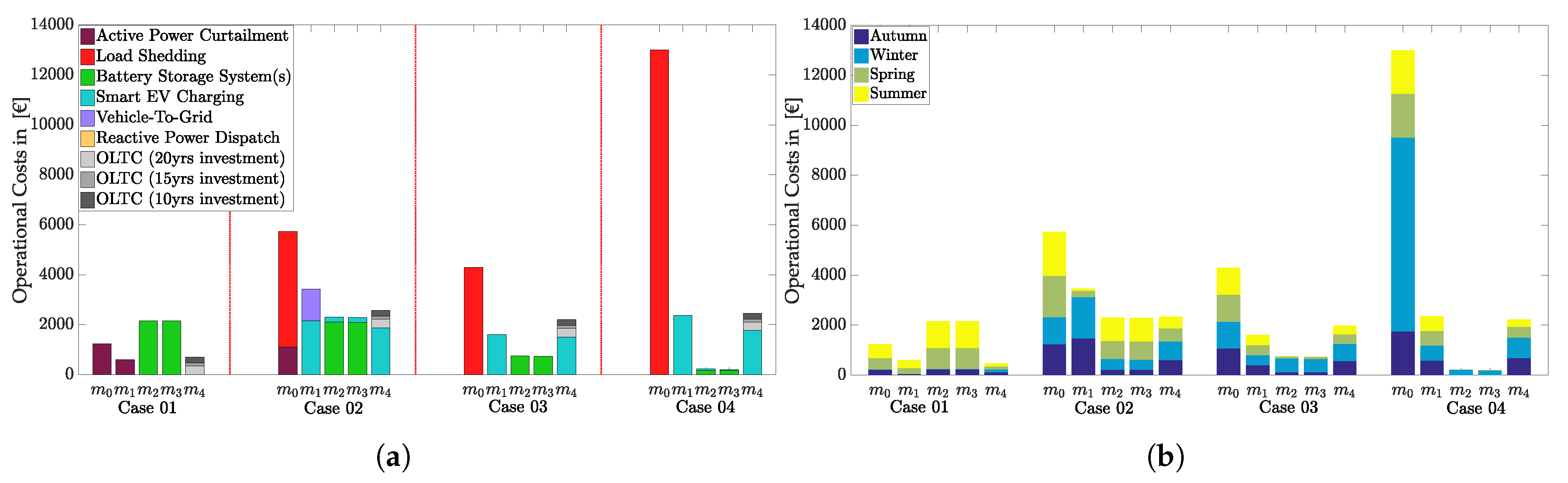
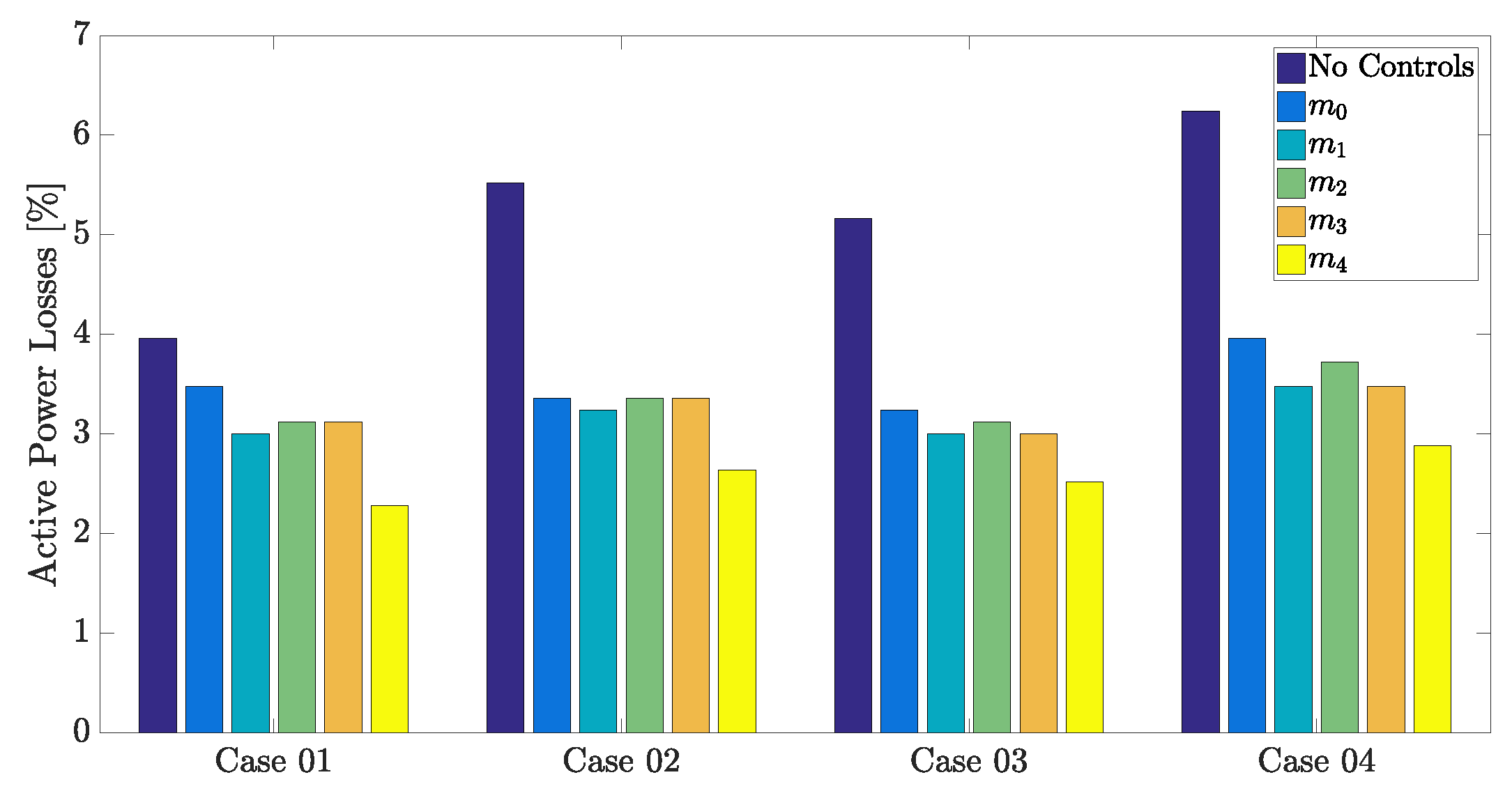
4.1.1. Minimization of Active Power Losses
4.1.2. Sensitivity Analysis on BESS and Smart-Charging Coordination
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Distribution Network Models (Lines and Transformer)
Appendix B. Calculation of Derivatives
References
- Bruno, S.; La Scala, M. Unbalanced Three-Phase Optimal Power Flow for the Optimization of MV and LV Distribution Grids. In From Smart Grids to Smart Cities: New Challenges in Optimizing Energy Grids; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 1–42. [Google Scholar]
- Hatziargyriou, N.; Vlachokyriakou, O.; Van Cutsem, T.; Milanovic, J.; Pourbeik, P.; Vournas, C.; Hong, M.; Ramos, R.; Boemer, J.; Aristidou, P. Task Force on Contribution to Bulk System Control and Stability by Distributed Energy Resources Connected at Distribution Network; Rep. PES-TR22; IEEE PES: Piscataway, NJ, USA, 2017. [Google Scholar]
- Razavi, S.E.; Rahimi, E.; Javadi, M.S.; Nezhad, A.E.; Lotfi, M.; Shafie-khah, M.; Catalão, J.P.S. Impact of distributed generation on protection and voltage regulation of distribution systems: A review. Renew. Sustain. Energy Rev. 2019, 105, 157–167. [Google Scholar] [CrossRef]
- Bruno, S.; Lamonaca, S.; Rotondo, G.; Stecchi, U.; La Scala, M. Unbalanced three-phase optimal power flow for smart grids. IEEE Trans. Ind. Electron. 2011, 58, 4504–4513. [Google Scholar] [CrossRef]
- Lotfi, M.; Monteiro, C.; Shafie-khah, M.; Catalão, J.P.S. Evolution of Demand Response: A Historical Analysis of Legislation and Research Trends. In Proceedings of the 2018 Twentieth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 18–20 December 2018; pp. 968–973. [Google Scholar] [CrossRef]
- Rodrigues, J.; Moreira, C.; Lopes, J.A. Smart Transformers as Active Interfaces Enabling the Provision of Power-Frequency Regulation Services from Distributed Resources in Hybrid AC/DC Grids. Appl. Sci. 2020, 10, 1434. [Google Scholar] [CrossRef] [Green Version]
- Karagiannopoulos, S.; Aristidou, P.; Hug, G. A Centralised Control Method for Tackling Unbalances in Active Distribution Grids. In Proceedings of the IEEE 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018. [Google Scholar]
- Borghetti, A.; Bosetti, M.; Grillo, S.; Massucco, S.; Nucci, C.A.; Paolone, M.; Silvestro, F. Short-Term Scheduling and Control of Active Distribution Systems With High Penetration of Renewable Resources. IEEE Syst. J. 2010, 4, 313–322. [Google Scholar] [CrossRef]
- Et-Taoussi, M.; Ouadi, H.; Chakir, H.E. Hybrid optimal management of active and reactive power flow in a smart microgrid with photovoltaic generation. Microsyst. Technol. 2019. [Google Scholar] [CrossRef]
- Olivier, F.; Aristidou, P.; Ernst, D.; Cutsem, T.V. Active Management of Low-Voltage Networks for Mitigating Overvoltage Due to Photovoltaic Units. IEEE Trans. Smart Grid 2016, 7, 926–936. [Google Scholar] [CrossRef] [Green Version]
- Karagiannopoulos, S.; Aristidou, P.; Hug, G. Data-driven Local Control Design for Active Distribution Grids using offline Optimal Power Flow and Machine Learning Techniques. IEEE Trans. Smart Grid 2019. [Google Scholar] [CrossRef]
- Lilla, S.; Orozco, C.; Borghetti, A.; Napolitano, F.; Tossani, F. Day-ahead scheduling of a local energy community: An alternating direction method of multipliers approach. IEEE Trans. Power Syst. 2019. [Google Scholar] [CrossRef]
- Karambelkar, S.; Mackay, L.; Chakraborty, S.; Ramirez-Elizondo, L.; Bauer, P. Distributed Optimal Power Flow for DC Distribution Grids. In Proceedings of the 2018 IEEE Power & Energy Society General Meeting (PESGM), Portland, OR, USA, 5–10 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Karfopoulos, E.L.; Panourgias, K.A.; Hatziargyriou, N.D. Distributed Coordination of Electric Vehicles providing V2G Regulation Services. IEEE Trans. Power Syst. 2016, 31, 2834–2846. [Google Scholar] [CrossRef]
- Efkarpidis, N.; De Rybel, T.; Driesen, J. Optimal placement and sizing of active in-line voltage regulators in flemish LV distribution grids. IEEE Trans. Ind. Appl. 2016, 52, 4577–4584. [Google Scholar] [CrossRef]
- Shahnia, F.; Majumder, R.; Ghosh, A.; Ledwich, G.; Zare, F. Voltage imbalance analysis in residential low voltage distribution networks with rooftop PVs. Electr. Power Syst. Res. 2011, 81, 1805–1814. [Google Scholar] [CrossRef]
- Degroote, L.; Renders, B.; Meersman, B.; Vandevelde, L. Neutral-point shifting and voltage unbalance due to single-phase DG units in low voltage distribution networks. In Proceedings of the 2009 IEEE Bucharest PowerTech, Bucharest, Romania, 28 June–2 July 2009; pp. 1–8. [Google Scholar] [CrossRef]
- Efkarpidis, N.; De Rybel, T.; Driesen, J. Technical assessment of centralized and localized voltage control strategies in low voltage networks. Sustain. Energy Grids Netw. 2016, 8, 85–97. [Google Scholar] [CrossRef]
- Demirok, E.; González, P.C.; Frederiksen, K.H.B.; Sera, D.; Rodriguez, P.; Teodorescu, R. Local Reactive Power Control Methods for Overvoltage Prevention of Distributed Solar Inverters in Low-Voltage Grids. IEEE J. Photovoltaics 2011, 1, 174–182. [Google Scholar] [CrossRef]
- Cagnano, A.; De Tuglie, E.; Liserre, M.; Mastromauro, R.A. Online optimal reactive power control strategy of PV inverters. IEEE Trans. Ind. Electron. 2011, 58, 4549–4558. [Google Scholar] [CrossRef]
- Heleno, M.; Rua, D.; Gouveia, C.; Madureira, A.; Matos, M.A.; Lopes, J.P.; Silva, N.; Salustio, S. Optimizing PV self-consumption through electric water heater modeling and scheduling. In Proceedings of the 2015 IEEE Eindhoven PowerTech, Eindhoven, The Netherlands, 29 June–2 July 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Stetz, T.; Marten, F.; Braun, M. Improved low voltage grid-integration of photovoltaic systems in Germany. IEEE Trans. Sustain. Energy 2012, 4, 534–542. [Google Scholar] [CrossRef]
- Su, X.; Masoum, M.A.S.; Wolfs, P.J. Multi-Objective Hierarchical Control of Unbalanced Distribution Networks to Accommodate More Renewable Connections in the Smart Grid Era. IEEE Trans. Power Syst. 2016, 31, 3924–3936. [Google Scholar] [CrossRef]
- Samadi, A.; Shayesteh, E.; Eriksson, R.; Rawn, B.; Söder, L. Multi-objective coordinated droop-based voltage regulation in distribution grids with PV systems. Renew. Energy 2014, 71, 315–323. [Google Scholar] [CrossRef]
- Petrou, K.; Procopiou, A.; Ochoa, L.F.; Langstaff, T.; Theunissen, J. Residential Battery Controller For Solar PV Impact Mitigation: A Practical and Customer-friendly Approach; AIM: Madrid, Spain, 2019. [Google Scholar]
- Tsiropoulos, I.; Tarvydas, D.; Lebedeva, N. Li-ion Batteries for Mobility and Stationary Storage Applications Scenarios for Costs and Market Growth; Publications Office of the European Union: Luxembourg, 2018. [Google Scholar]
- Aghaei, J.; Bozorgavari, S.A.; Pirouzi, S.; Farahmand, H.; Korpås, M. Flexibility Planning of Distributed Battery Energy Storage Systems in Smart Distribution Networks. Iran. J. Sci. Technol. Trans. Electr. Eng. 2019. [Google Scholar] [CrossRef]
- Miranda, I.; Leite, H.; Silva, N. Coordination of multifunctional distributed energy storage systems in distribution networks. IET Gener. Transm. Distrib. 2016, 10, 726–735. [Google Scholar] [CrossRef]
- Union, E. Directive 2009/72/ec of the european parliament and of the council of 13 july 2009 concerning common rules for the internal market in electricity and repealing directive 2003/54/ec. Off. J. Eur. Union 2009, 211, 55–93. [Google Scholar]
- Efkarpidis, N.; De Rybel, T.; Driesen, J. Optimization control scheme utilizing small-scale distributed generators and OLTC distribution transformers. Sustain. Energy Grids Netw. 2016, 8, 74–84. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Soares, F.J.; Almeida, P.M.R. Integration of electric vehicles in the electric power system. Proc. IEEE 2010, 99, 168–183. [Google Scholar] [CrossRef] [Green Version]
- Sharma, I.; Cañizares, C.; Bhattacharya, K. Smart Charging of PEVs Penetrating Into Residential Distribution Systems. IEEE Trans. Smart Grid 2014, 5, 1196–1209. [Google Scholar] [CrossRef]
- Richardson, P.; Flynn, D.; Keane, A. Optimal Charging of Electric Vehicles in Low-Voltage Distribution Systems. IEEE Trans. Power Syst. 2012, 27, 268–279. [Google Scholar] [CrossRef] [Green Version]
- García-Villalobos, J.; Zamora, I.; Knezović, K.; Marinelli, M. Multi-objective optimization control of plug-in electric vehicles in low voltage distribution networks. Appl. Energy 2016, 180, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Connell, A.O.; Flynn, D.; Keane, A. Rolling Multi-Period Optimization to Control Electric Vehicle Charging in Distribution Networks. IEEE Trans. Power Syst. 2014, 29, 340–348. [Google Scholar] [CrossRef]
- Jiricka, J.; Kaspirek, M.; Kolar, L.; Zahradka, M. Smart substation MV/LV. CIRED Open Access Proc. J. 2017, 2017, 1482–1486. [Google Scholar] [CrossRef]
- Liu, X.; Aichhorn, A.; Liu, L.; Li, H. Coordinated Control of Distributed Energy Storage System with Tap Changer Transformers for Voltage Rise Mitigation Under High Photovoltaic Penetration. IEEE Trans. Smart Grid 2012, 3, 897–906. [Google Scholar] [CrossRef]
- Maniatopoulos, M.; Lagos, D.; Kotsampopoulos, P.; Hatziargyriou, N. Combined control and power hardware in-the-loop simulation for testing smart grid control algorithms. IET Gener. Transm. Distrib. 2017, 11, 3009–3018. [Google Scholar] [CrossRef]
- Kulmala, A.; Repo, S.; Järventausta, P. Coordinated Voltage Control in Distribution Networks Including Several Distributed Energy Resources. IEEE Trans. Smart Grid 2014, 5, 2010–2020. [Google Scholar] [CrossRef]
- Fortenbacher, P.; Zellner, M.; Andersson, G. Optimal sizing and placement of distributed storage in low voltage networks. In Proceedings of the 2016 Power Systems Computation Conference (PSCC), Genoa, Italy, 20–24 June 2016; pp. 1–7. [Google Scholar] [CrossRef] [Green Version]
- Kotsalos, K.; Miranda, I.; Silva, N.; Leite, H. A Horizon Optimization Control Framework for the Coordinated Operation of Multiple Distributed Energy Resources in Low Voltage Distribution Networks. Energies 2019, 12, 1182. [Google Scholar] [CrossRef] [Green Version]
- Kotsalos, K.; Domingues-Garcia, J.L.; Hatziargyriou, N.; Miranda, I.; Leite, H.; Silva, N. Coordinated Management of Distributed Energy Resources in Smart Microgrids. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019. [Google Scholar]
- Ciric, R.M.; Feltrin, A.P.; Ochoa, L.F. Power flow in four-wire distribution networks-general approach. IEEE Trans. Power Syst. 2003, 18, 1283–1290. [Google Scholar] [CrossRef] [Green Version]
- Zimmerman, R.D.; Murillo-Sánchez, C.E. MATPOWER 6.0 User’S Manual; Power Systems Engineering Research Center: Arizona, AZ, USA, 2016; Volume 9. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Science & Business Media: Cham, Switzerland, 2006; pp. 497–528. [Google Scholar]
- Wang, Y.J. Analysis of effects of three-phase voltage unbalance on induction motors with emphasis on the angle of the complex voltage unbalance factor. IEEE Trans. Energy Convers. 2001, 16, 270–275. [Google Scholar] [CrossRef]
- Jen-Hao, T. A direct approach for distribution system load flow solutions. IEEE Trans. Power Deliv. 2003, 18, 882–887. [Google Scholar] [CrossRef]
- Zhu, J. Optimization of Power System Operation; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2015; pp. 1–12. [Google Scholar] [CrossRef]
- Burer, S.; Letchford, A.N. Non-convex mixed-integer nonlinear programming: A survey. Surv. Oper. Res. Manag. Sci. 2012, 17, 97–106. [Google Scholar] [CrossRef] [Green Version]
- Timbus, A.; Larsson, M.; Yuen, C. Active management of distributed energy resources using standardized communications and modern information technologies. IEEE Trans. Ind. Electron. 2009, 56, 4029–4037. [Google Scholar] [CrossRef]
- Le Digabel, S. Algorithm 909: NOMAD: Nonlinear optimization with the MADS algorithm. ACM Trans. Math. Softw. (TOMS) 2011, 37, 44. [Google Scholar] [CrossRef]
- Espinosa, A.N. Dissemination Document “Low Voltage Networks Models and Low Carbon Technology Profiles”; The University of Manchester: Manchester, UK, 2015. [Google Scholar]
- Pedersen, R.; Sloth, C.; Andresen, G.B.; Wisniewski, R. DiSC: A simulation framework for distribution system voltage control. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 1056–1063. [Google Scholar]
- Pinto, R.; Bessa, R.J.; Matos, M.A. Multi-period flexibility forecast for low voltage prosumers. Energy 2017, 141, 2251–2263. [Google Scholar] [CrossRef] [Green Version]
- Masetti, C. Revision of European Standard EN 50160 on power quality: Reasons and solutions. In Proceedings of the 14th International Conference on Harmonics and Quality of Power (ICHQP 2010), Bergamo, Italy, 26–29 September 2010; pp. 1–7. [Google Scholar]
- dos Serviços Energéticos, E.E.R. Parâmetros de Regulação para o Período 2015–2017; Entidade Reguladora Dos ServiçOs EnergéTicos: Lisboa, Portugal, 2014. [Google Scholar]
- Cheng, C.S.; Shirmohammadi, D. A three-phase power flow method for real-time distribution system analysis. IEEE Trans. Power Syst. 1995, 10, 671–679. [Google Scholar]
- Bazrafshan, M.; Gatsis, N. Comprehensive Modeling of Three-Phase Distribution Systems via the Bus Admittance Matrix. IEEE Trans. Power Syst. 2018, 33, 2015–2029. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Investment cost (€) | 7.000 | |
| Step Voltage (%) | (up to 3) hereby constant at 2 | |
| Min/Max tap-position | (up to ) | |
| Min/Max voltage (p.u.) | 1.1/0.9 | |
| Maintanance-free operations | 700.000 | |
| Approximated Cost per Tap (€) | 0.01 |
| 2025 (reference year) | |
| Price (euro/kWh) *(includes costs of investment) | 290 |
| Cycles DoD at 80% in lifetime | 5000 |
| LCOE calculation (€/kWh) | 0.0725 |
| Case 01 | Case 02 | Case 03 | Case 04 | |
|---|---|---|---|---|
| PV [nr of PV units] | 30 | 30 | 0 | 20 |
| EV [nr of EVs] | 0 | 30 | 30 | 35 |
| Operational Mode | Conventional Operation –No Smart Controls Applied– (m) | DER Optimal Coordination (m) | BESS Coordinated with DER (m) | Distributed BESS Coordinated with DER (m) | Coordination of OLTC with DER |
|---|---|---|---|---|---|
| OLTC | ✕ | ✕ | ✕ | ✓ | ✓ |
| BESS | ✕ | ✕ | ✓ | ✕ | ✓ |
| Smart Charging | ✕ | ✓ | ✓ | ✓ | ✓ |
| Vehicle to Grid | ✕ | ✓ | ✓ | ✓ | ✓ |
| G Active Power Curtailment | ✓ | ✓ | ✓ | ✓ | ✓ |
| G Reactive Power Dispatch | ✕ | ✓ | ✓ | ✕ | ✕ |
| Load Shedding | ✓ | ✕ | ✕ | ✕ | ✕ |
| B | Cost (€/kWrh-kVArh) | |
|---|---|---|
| Cost of Active Power Curtailment | 0.30 | |
| Cost Smart Charging | 0.15 | |
| Cost of V2G | 0.35 | |
| Cost of Energy Not Supplied Lines | 3 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kotsalos, K.; Miranda, I.; Dominguez-Garcia, J.L.; Leite, H.; Silva, N.; Hatziargyriou, N. Exploiting OLTC and BESS Operation Coordinated with Active Network Management in LV Networks. Sustainability 2020, 12, 3332. https://0-doi-org.brum.beds.ac.uk/10.3390/su12083332
Kotsalos K, Miranda I, Dominguez-Garcia JL, Leite H, Silva N, Hatziargyriou N. Exploiting OLTC and BESS Operation Coordinated with Active Network Management in LV Networks. Sustainability. 2020; 12(8):3332. https://0-doi-org.brum.beds.ac.uk/10.3390/su12083332
Chicago/Turabian StyleKotsalos, Konstantinos, Ismael Miranda, Jose Luis Dominguez-Garcia, Helder Leite, Nuno Silva, and Nikos Hatziargyriou. 2020. "Exploiting OLTC and BESS Operation Coordinated with Active Network Management in LV Networks" Sustainability 12, no. 8: 3332. https://0-doi-org.brum.beds.ac.uk/10.3390/su12083332