
A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming

 ,
,  ,
,  , ,
, , 
Abstract
:1. Introduction
- Field Monitoring: Smart farming helps in reducing crop waste by adapting better monitoring, accurate data obtaining and data processing.
- Livestock Monitoring and Tracking: Smart farming helps to identify the location of animals grazing in open area within big stables. Technology also helps to measure the status of ventilation and air quality in farms and detect harmful gases from excrement.
- Application in Green Houses: Smart farming controls micro-climate conditions towards the aim of maximizing the production and quality of fruits and vegetables within green houses.
- Compost Management: As a measure of preventing fungus and other microbial contaminants, smart farming helps to control the level of humidity and temperature in crops such as straw, hay, etc.
- Offspring Care: Smart farming controls the growing conditions of the offspring in animal farms, hence ensuring their survival and health.
- Exploring two emerging technologies: IoT and UAV, which will be the pioneers of smart farming in the coming years.
- Outlining some major applications of IoT and UAV in smart farming as well as the agricultural industry.
- Exploring the communication technologies, network functionalities and connectivity requirements needed to ensure seamless connectivity for Smart farming.
- Identifying the connectivity limitations and challenges of smart agriculture in remote areas with two case studies. In case study-1, we propose and evaluate meshed Long Range Wide Area Network (LoRaWAN) gateways to address connectivity limitations of Smart Farming—while, in case study-2, we explore satellite communication systems to provide connectivity to smart farms in remote areas in Australia.
- Identifying future research challenges on this topic and outlining directions to address those challenges.
2. IoT and UAVs in Sustainable Smart Farming
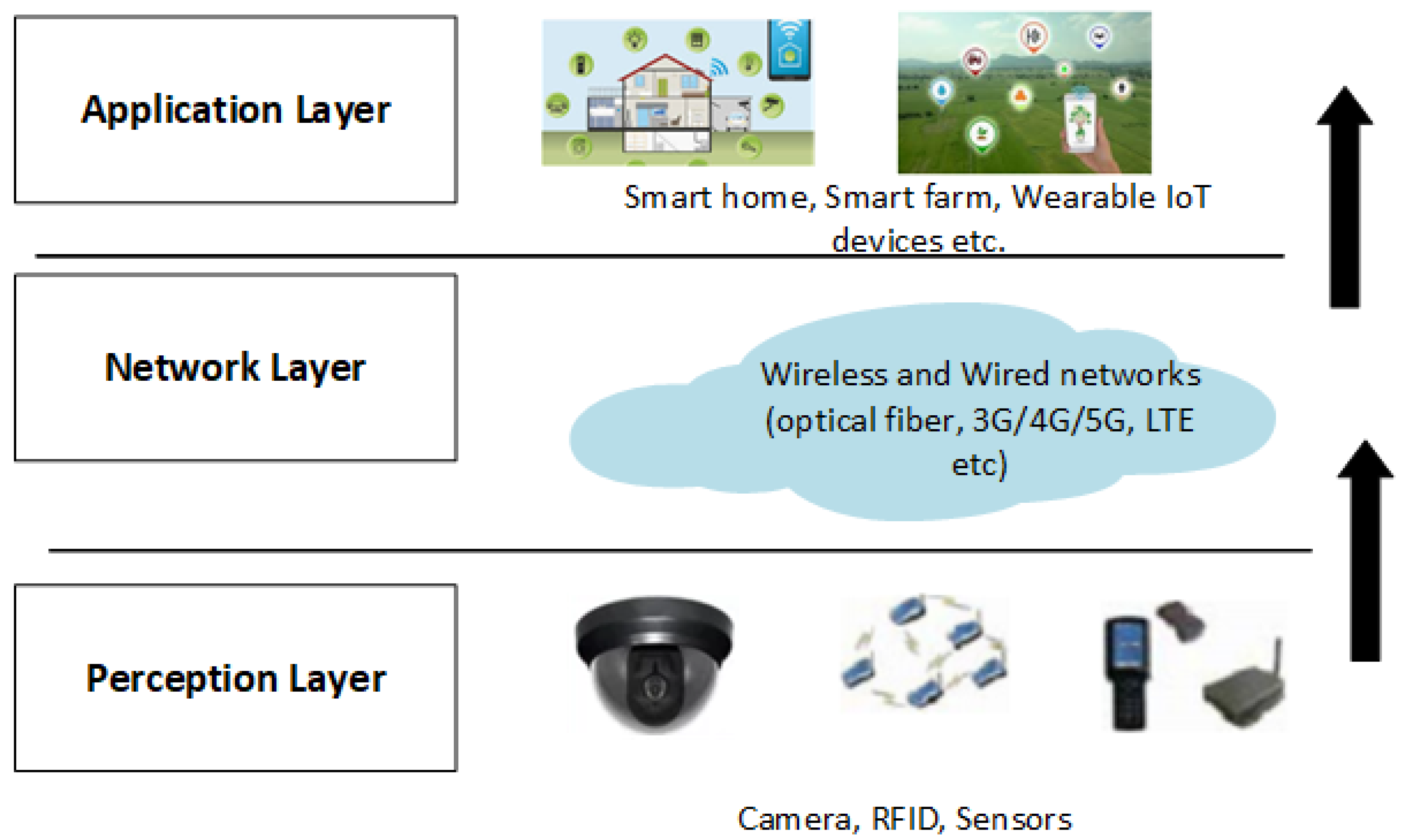
2.1. IoT in Smart Farming
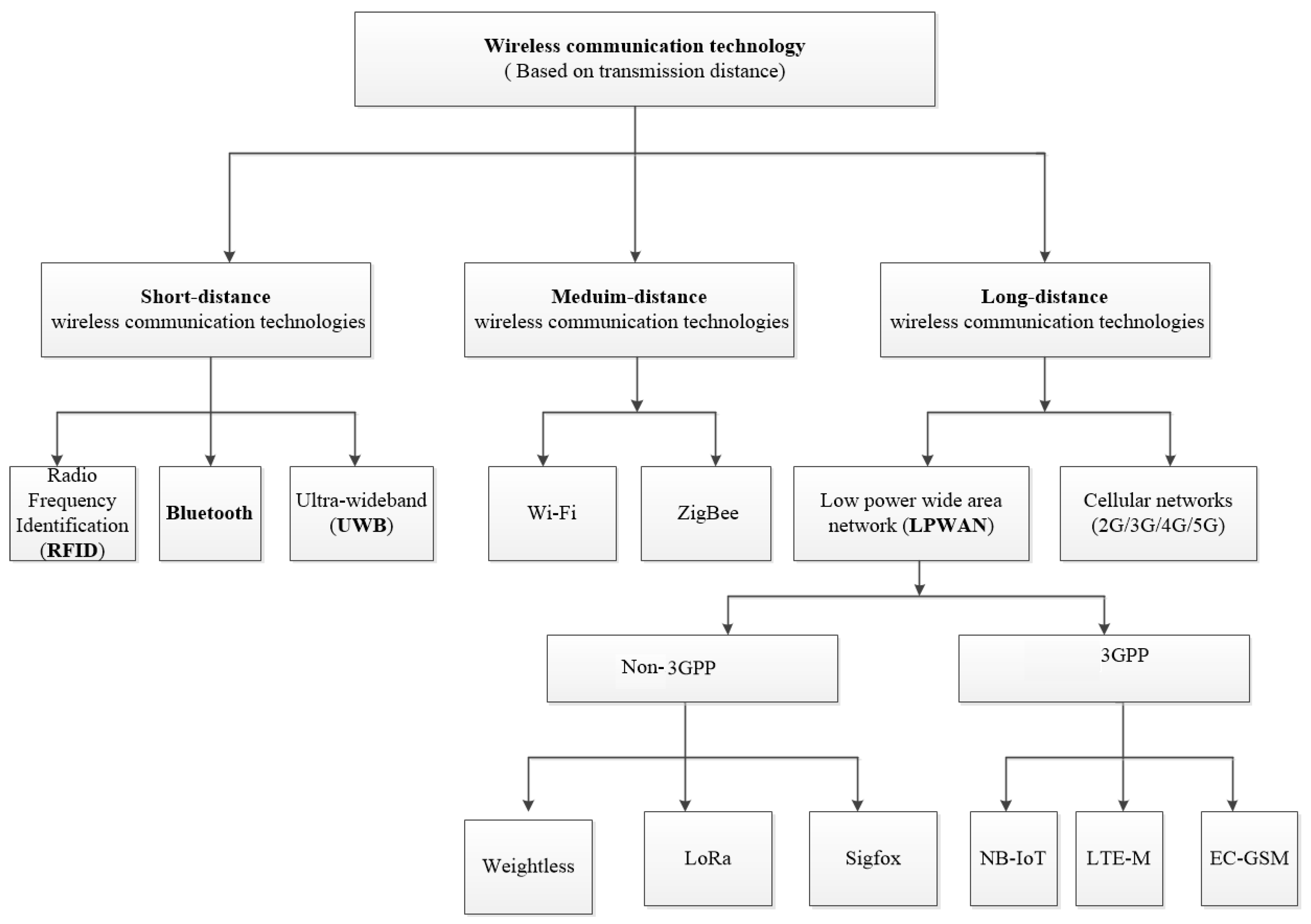
- Wireless connectivity technologies with short-distance communication range (at most 10 m): Examples include Bluetooth, RFID, UWB technologies [15].
- Wireless connectivity technologies with a long-distance range (100 m and above): Cellular networks, and Low Power Wide Area (LPWA) technologies which are classified to Non-3GPP (LoRa [18], Sigfox [19] and Weightless) and 3GPP (NB-IoT [20], LTE-M, EC-GSM) technologies that are considered in the long-distance communication range category.
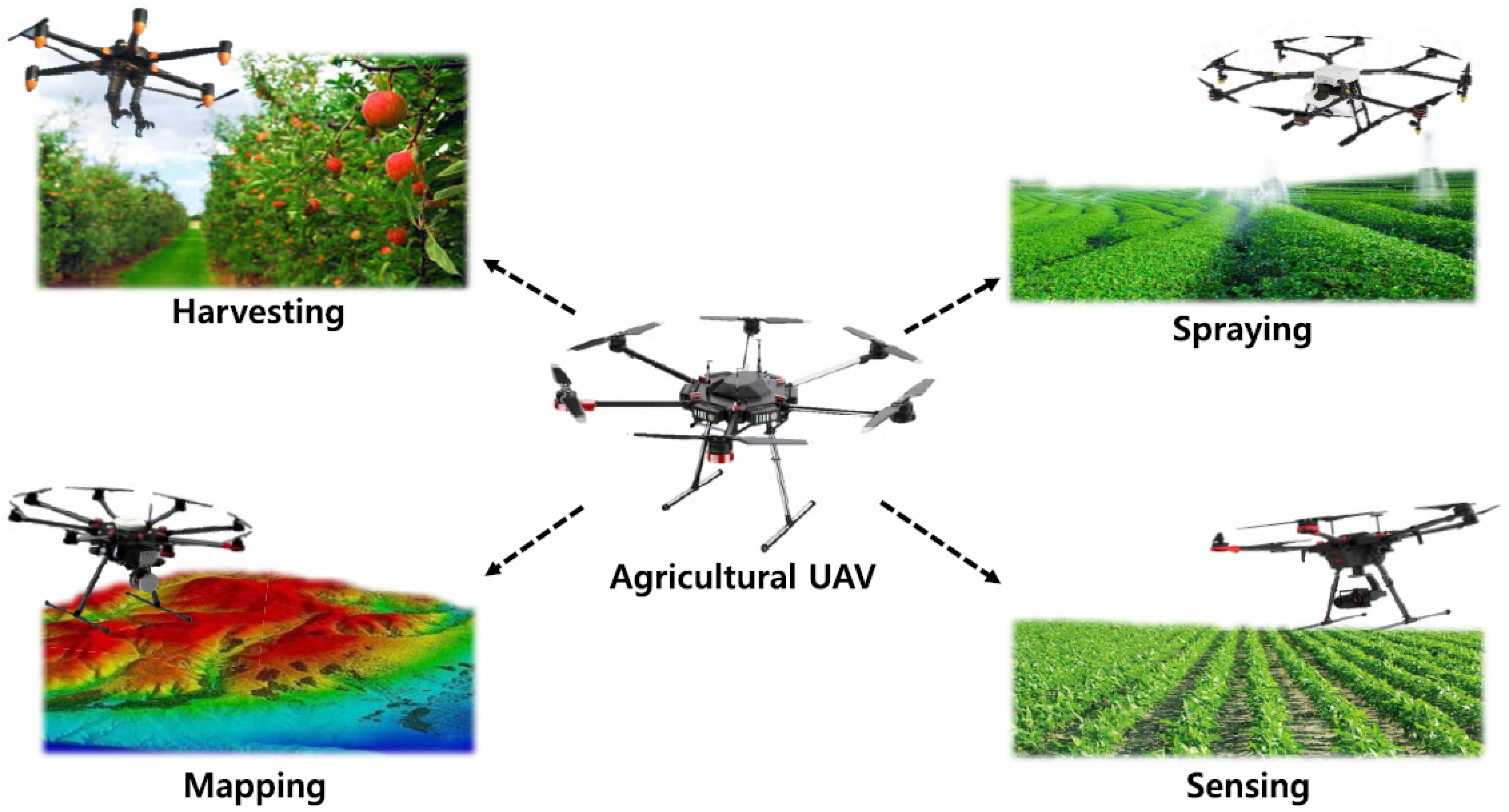
2.2. UAVs in Smart Farming
3. Application Areas of IoT and UAV in Smart Farming
3.1. Monitoring
3.2. Mapping
3.3. Detecting Weed and Infestation
3.4. Planting Seeds and Seedlings
3.5. Spraying Pesticides and Fertilizers
3.6. Forecasting
3.7. Controlling
4. Communication Technologies for Seamless Connectivity in Smart Farming
4.1. Network Functionality and Connectivity Requirements
4.2. Availability and Challenges of Communication Technologies
4.2.1. Cellular Networks
4.2.2. LPWAN Technologies
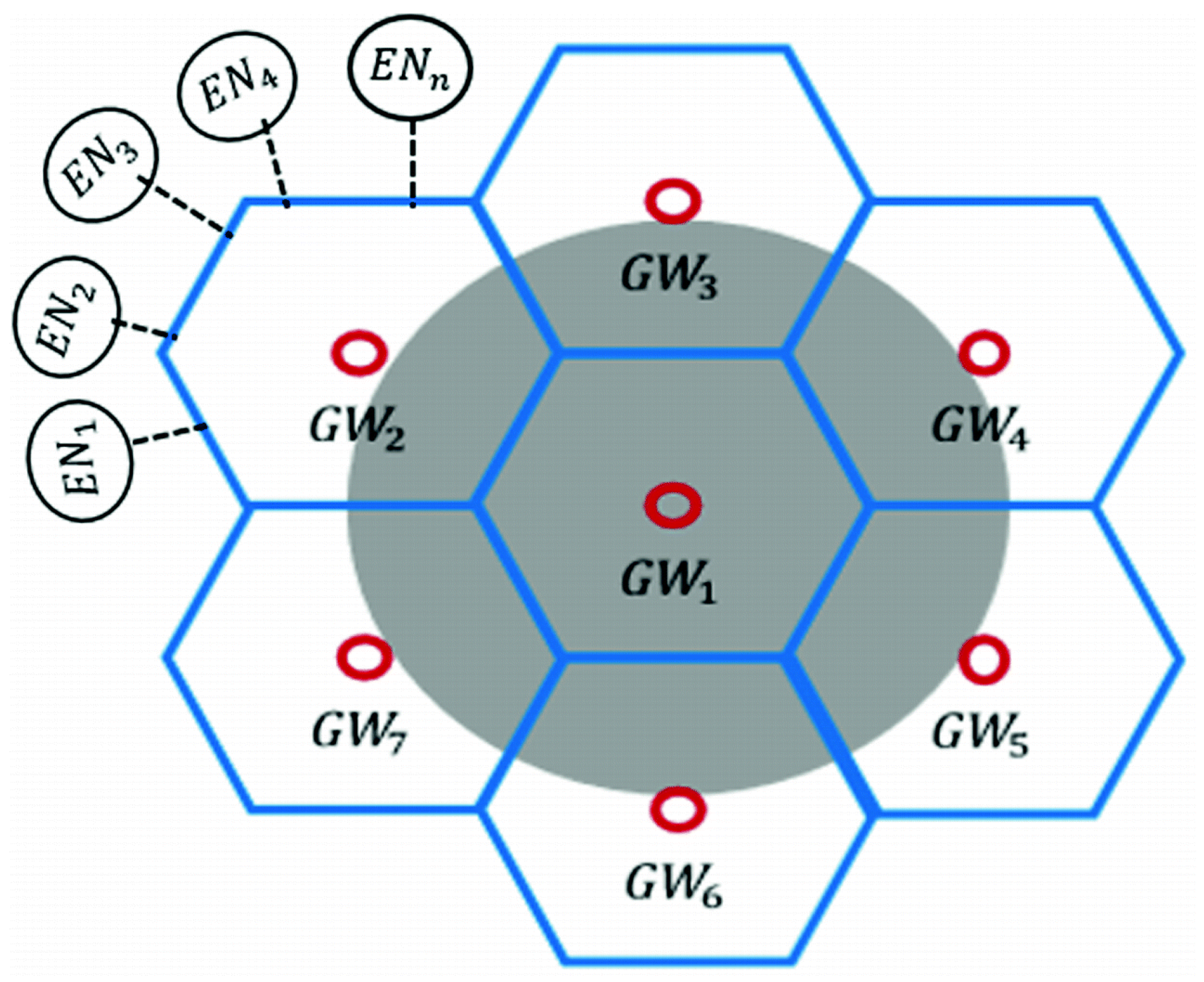
- LoRaWAN (Long Range Wide Area Network): LoRaWAN was defined by Alliance in article [67]. The network and media access control protocols are both defined on top of the physical layer of LoRa by LoRaWAN, the required parameters at the physical layer are defined by LoRa [61,64,66,68]. The radio frequency bands (169, 443, 868, and 915 MHz) with 0.25 and 12.5 kbps data rates are used in LoRaWAN [9]. LoRaWAN communication connects the LoRa gateway to a number of sensors. Drones (UAVs) equipped LoRa gateways are able to fly over the agriculture regions and gather data from sensors placed on the bottom of the farm. By doing this, users will be able to access the remote and inaccessible areas. In addition, this provides a larger coverage using a single gateway. Some applications cannot take advantage of the LoRa technology because there are still some restrictions in using such a technology. One of the main drawbacks of IoT applications is that a device with LoRa technology can only transmit at most 36 seconds per hour. This is the main limitation that can affect not only the time among messages but also the payload. Therefore the IoT application equipped with LoRa should be programmed in such a way that can adapt itself with these limitations. Moreover, only the half-duplex communication can be supported by the latest LoRa modules, which means a device with LoRa cannot receive and send data at the same time [69].Some of the limitations of LoRaWAN are considered as follows: Firstly, LoRaWAN uses the ALOHA Protocol which is not slotted, in its MAC layer. This means Clear Channel Assessment (CCA) is not performed at all, and packets can be transmitted at any arbitrary time. The collision avoidance mechanism, which is employed in order to cost reduction and simplicity provision, is not used in this mechanism. Secondly, if the devices in LoRaWAN are mobile, there is no certain handover method, as these devices are not associated with a specific gateway. Finally, there are three classes in LoRaWAN including, Class All, Beacon, and Continuous which are called A, B, and C, respectively. Class A is intended to enhance the power efficiency of the sensors, which work with a battery. Actuator nodes use Class B that inherits and performs all the functionality of Class A. The periodic receiving windows are also being opened and are allowed to receive the downlink messages by Class B. Devices in Class C are listening without interruption to receive the messages, hence these devices should have a lot of power.
- Narrow-Band IoT (NB-IoT): NB-IoT is a protocol in mobile communications, especially standardized by the 3GPP standardization group with a 180 kHz bandwidth. Using this bandwidth, the down-link and up-link data rates are considerably reduced around 20 and 250 kbps, respectively. As a result of this, updating Firmware over the Air (FotA) will be hard to reach using NB-IoT. As NB-IoT does not support the handover, considering NB-IoT for mobile IoT applications will be difficult, as well. In addition, current LTE infrastructures need to be upgraded when it comes to using NB-IoT. Therefore, deploying NB-IoT is a difficult task [64,68].
- Sigfox: Sigfox [70] is a LPWAN technology that takes advantage of Ultra-Narrow-Band modulation (UNB) which decreases the levels of noise then the communication rate will increase. It is proper for the lightweight and low data rate IoT based devices. The typical structure of the modulation is Binary Phase Shift Keying (BPSK). In addition, the down-link and up-link communications of each device are limited by Sigfox. Moreover, many countries have used Sigfox and there is no roaming involved.
4.2.3. Comparison in Terms of IoT Factors
- Coverage and Range: The highest coverage range (at least 40 km) is related to Sigfox, and only one Base Station is enough to cover the entire area. The lowest range (at most 10 km) is obtained using NB-IoT which is not adapted for rural regions, and it is only used for LTE infrastructure. LoRaWAN has a coverage range of at most 20 km [72].
- Latency: NB-IoT offers a low IoT latency connectivity, while a low bidirectional latency is provided by Sigfox and LoRaWAN at the expense of increased energy consumption [73]. As a result, the best solution for IoT applications with low latency connectivity and latency insensitive applications can be NB-IoT, LoRaWAN-Class-C, and LoRaWANClass-A and Sigfox, respectively.
- Battery life: The lifetime of NB-IoT based devices is lower than LoRaWAN and Sigfox ones. This is because the energy consumption of NBIoT based devices is more than Sigfox and LoRaWAN devices, as they need to handle QoS and synchronous communication [40].
- Quality of service (QoS): Some applications need the Qos requirements, Sigfox and LoRaWAN are suitable for such applications, while for those applications that need QoS requirements NB-IoT is preferred [74].
- Scalability and Payload length: Sigfox, NB-IoT, and LoRaWAN provide high scalability. NB-IoT not only provides higher scalability than LoRaWAN and Sigfox but also maximum payload length. About 50K connected devices per Base Station is supported by RaWAN and Sigfox while NB-IoT supports twice as much as this number of users [70]. NB-IoT allows the highest payload length of 1600 bytes, while the Sigfox allows the lowest data transmission up to 12 bytes.
- Deployment model: Many countries and cities take advantage of completed LoRaWAN and Sigfoxs’ ecosystems. LoRaWAN is deployed in 42 countries while Sigfox is used in 31 ones [72]. However, NB-IoT was published under rollout to set up its network over the world. Sigfox, NB-IoT, and LoRaWAN technologies are still in the final phase. Public network operation and local network placement via Base Stations are provided by these three technologies.
5. Connectivity Limitations of Smart Farming in Remote Areas
- Longer range connectivity with redundant connections: In remote areas, the IoT devices need to be spread out over a larger area to cover an entire farm. These devices often fail to get connected to nearby internet sources due to their limited communication range. Therefore, existing connectivity range of IoT gateways need to be improved to reduce dependency on backhaul systems.
- Self sustained power source: current IoT system must reduce dependency on traditional main grid power source to make it usable in remote setting. A sensor system could use renewable energy with adaptive energy sharing and management.
- Low and remote maintenance requirement: Inaccessibility is one of the major limitations of remote areas. Hence the IoT devices set in remote locations should have higher durability, improved reliability and low maintenance requirement. They should be equipped with proactive and remote management and maintenance for remote areas.
- Minimal power usages using optimised techniques: Power is a scarce resource in remote area. Therefore, low power consuming techniques are desirable for battery operated nodes in remote areas.
- Privacy assurance: Many of the existing IoT systems ignored users and objects privacy requirement. For sustainable growth and trust, the IoT system must assure privacy of users and objects at minimum.
5.1. Case Study 1: Meshed LoRaWAN Gateways for Smart Farming in Remote Areas
5.2. Case Study 2: Satellite Communication Systems to Provide Connectivity to Smart Farms in Remote Areas of Australia
6. Open Research Issues
- Hardware maintenance and limited energy resources:The perception layer’s hardware are setup in harsh environment, like farms and mining field, which have extreme weather conditions like high temperature, rain, strong wind and extreme humidity, etc. As a result, the electronic circuits of these hardware devices get damaged. Therefore, stronger hardware devices need to be designed that will be less damaged by the harsh environment. Additionally, these devices operate on inadequate battery power consistently for a long period. Hence, alternative energy efficient solutions are required for the end devices because, in case of any program failure, instant battery replacement is complicated, especially in remote areas [35]. Authors in [90,91] suggested energy efficient approaches for the network side; however, energy efficient solutions for the end devices are also desirable.
- Security and privacy issues:The use of IoT contributes to widespread exposure to cyber security risks and vulnerabilities in smart farming. Gupta et al. in [92], introduced some key challenges for security and privacy in smart farming: access control and trust, data, network and compliance, and supply chain. The architecture of smart farming recognizes the high chance of cyber attacks, which needs to be addressed. A smart farm which is a highly connected system and generates a huge amount of data. Since most of the devices used in smart farming are unattended therefore, they can be easily targeted by the attacker. If the attacker is able to compromise a device, then, through that infected device, attacks can spread through the whole network and infected all other devices. In the literature, several machine learning assisted Intrusion Detection Systems (IDS) [93,94] have been proposed to identify the infected device by analysing the network traffic. However, none of them have considered the smart farming specific solution. Therefore, smart farm-specific sophisticated access control and machine learning-based IDS development can be an effective solution in this regard.
- Big data in smart farming:A massive volume of data with a wide variety are captured, stored and analysed for decision-making in IoT and UAV based smart farming. Big data are used to provide predictive insights in farming operation by providing real-time operational decisions. The scope of Big Data applications in Smart Farming goes beyond primary production; rather, it influences the entire food supply chain. The major issues with data analysis are data quality, intelligent processing and analysis, sustainable integration of Big Data sources, etc. [95]. The openness of the platform is also very important since it can empower farmers in their position in supply chains.
- Weed detection and management:Weed control is an important aspect of horticultural crop management. Failure to adequately control weeds leads to reduced yields and product quality. Use of chemical and cultural control strategies can lead to adverse environmental impacts when not managed carefully, and effective weed management strategies that minimise environmental risks through strategic application of control measures can be expensive to implement. Hence, low cost smart tools for identification and mapping of weeds at early growth stages will contribute to more effective, sustainable weed management approaches. Existing studies [26,96,97] have shown some approaches to detect weeds using UAV images; however, they only could achieve less than of accuracy, hence more accurate weed detection approaches are desirable. The authors in [4] presented a shielded band sprayer to spray herbicides in weed, avoiding to spray on crops, hence increase the food quality and reduce the use of plant protection products. However, further research should be carried out, which may indicate the occurrence of statistical differences in the production yield between various weed control methods in crops. It is recommended to continue crop tests based on the band spraying method in terms of the effectiveness of weed control and to extend the scope of tests with the quantitative analysis of the used herbicides and their possible residues in crop yield.
- Multi/hyper-spectral imagery for disease and pest control:Multi spectral and Hyper-spectral image based remote sensing techniques have demonstrated high potentiality in detecting pests and diseases in crops. A multi-disciplinary approach—including plant pathology, engineering, data analytic and informatics—is required [98,99] to utilise the full potential of these highly dimensional, sophisticated and innovative technologies. Besides precision crop protection, plant phenotyping for fungicide screening and resistance breeding can be optimized by these innovative technologies.
- Automated watering control and management in remote areas:the right amount of water usages is important to maintain aesthetic requirements of parks and sport groups. Farms need to water based on the crop’s need. Moreover, efficient water management needs to be implemented to reduce nutrient leaching in the stream by an excessive amount of water in the lower layer of the soil. Using live monitoring of moisture at various soil depths, watering based on Artificial Intelligent (AI), automating of watering and water management using IoT and UAV technology can address most of the above-mentioned objectives.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Ayaz, M.; Ammad-Uddin, M.; Sharif, Z.; Mansour, A.; Aggoune, E.H.M. Internet-of-Things (IoT)-Based Smart Agriculture: Toward Making the Fields Talk. IEEE Access 2019, 7, 129551–129583. [Google Scholar] [CrossRef]
- Panchasara, H.; Samrat, N.; Islam, N. Greenhouse Gas Emissions Trends and Mitigation Measures in Australian Agriculture Sector—A Review. Agriculture 2021, 11, 85. [Google Scholar] [CrossRef]
- Glaroudis, D.; Iossifides, A.; Chatzimisios, P. Survey, comparison and research challenges of IoT application protocols for smart farming. Comput. Netw. 2020, 168, 107037. [Google Scholar] [CrossRef]
- Osuch, A.; Przygodziński, P.; Rybacki, P.; Osuch, E.; Kowalik, I.; Piechnik, L.; Przygodziński, A.; Herkowiak, M. Analysis of the Effectiveness of Shielded Band Spraying in Weed Control in Field Crops. Agronomy 2020, 10, 475. [Google Scholar] [CrossRef] [Green Version]
- Villa-Henriksen, A.; Edwards, G.T.; Pesonen, L.A.; Green, O.; Sørensen, C.A.G. Internet of Things in arable farming: Implementation, applications, challenges and potential. Biosyst. Eng. 2020, 191, 60–84. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Ju, C.; Son, H.I. Unmanned aerial vehicles in agriculture: A review of perspective of platform, control, and applications. IEEE Access 2019, 7, 105100–105115. [Google Scholar] [CrossRef]
- Mogili, U.R.; Deepak, B. Review on application of drone systems in precision agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Agarwal, P.; Singh, V.; Saini, G.; Panwar, D. Sustainable Smart-farming framework: Smart farming. In Smart Farming Technologies for Sustainable Agricultural Development; IGI Global: Hershey, PA, USA, 2019; pp. 147–173. Available online: https://0-www-igi--global-com.brum.beds.ac.uk/chapter/sustainable-smart-farming-framework/209549 (accessed on 30 June 2020).
- Bacco, M.; Berton, A.; Ferro, E.; Gennaro, C.; Gotta, A.; Matteoli, S.; Paonessa, F.; Ruggeri, M.; Virone, G.; Zanella, A. Smart farming: Opportunities, challenges and technology enablers. In Proceedings of the 2018 IoT Vertical and Topical Summit on Agriculture-Tuscany (IOT Tuscany), Tuscany, Italy, 8–9 May 2018; pp. 1–6. [Google Scholar]
- Hunter, M.C.; Smith, R.G.; Schipanski, M.E.; Atwood, L.W.; Mortensen, D.A. Agriculture in 2050: Recalibrating targets for sustainable intensification. Bioscience 2017, 67, 386–391. [Google Scholar] [CrossRef] [Green Version]
- Tzounis, A.; Katsoulas, N.; Bartzanas, T.; Kittas, C. Internet of Things in agriculture, recent advances and future challenges. Biosyst. Eng. 2017, 164, 31–48. [Google Scholar] [CrossRef]
- Welbourne, E.; Battle, L.; Cole, G.; Gould, K.; Rector, K.; Raymer, S.; Balazinska, M.; Borriello, G. Building the internet of things using RFID: The RFID ecosystem experience. IEEE Internet Comput. 2009, 13, 48–55. [Google Scholar] [CrossRef]
- Gubbi, J.; Buyya, R.; Marusic, S.; Palaniswami, M. Internet of Things (IoT): A vision, architectural elements, and future directions. Future Gener. Comput. Syst. 2013, 29, 1645–1660. [Google Scholar] [CrossRef] [Green Version]
- Suhonen, J.; Kohvakka, M.; Kaseva, V.; Hämäläinen, T.D.; Hännikäinen, M. Low-Power Wireless Sensor Networks: Protocols, Services and Applications; Springer Science & Business Media: New York, NY, USA, 2012. [Google Scholar]
- Feng, X.; Yan, F.; Liu, X. Study of wireless communication technologies on Internet of Things for precision agriculture. Wirel. Pers. Commun. 2019, 108, 1785–1802. [Google Scholar] [CrossRef]
- Gislason, D. Zigbee Wireless Networking; Elsevier: Burlington, MA, USA, 2008. [Google Scholar]
- Alliance, W.F. Wi-fi alliance. Retrieved March 2009, 15, 2010. [Google Scholar]
- Alliance, L. White Paper: A Technical Overview of LoRa and LoRaWAN; The LoRa Alliance: San Ramon, CA, USA, 2015; pp. 7–11. [Google Scholar]
- Centenaro, M.; Vangelista, L.; Zanella, A.; Zorzi, M. Long-range communications in unlicensed bands: The rising stars in the IoT and smart city scenarios. IEEE Wirel. Commun. 2016, 23, 60–67. [Google Scholar] [CrossRef] [Green Version]
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Coverage and capacity analysis of sigfox, lora, gprs, and nb-iot. In Proceedings of the 2017 IEEE 85th vehicular technology conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Jain, R. Wireless Protocols for IoT Part II: IEEE 802.15.4 Wireless Personal Area Networks; IEEE: Saint Louise, MO, USA, 2016; Available online: https://www1.cse.wustl.edu/~jain/cse574-18/ftp/j_12wpn.pdf (accessed on 10 May 2020).
- Shi, X.; An, X.; Zhao, Q.; Liu, H.; Xia, L.; Sun, X.; Guo, Y. State-of-the-art internet of things in protected agriculture. Sensors 2019, 19, 1833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Le, N.T.; Hossain, M.A.; Islam, A.; Kim, D.y.; Choi, Y.J.; Jang, Y.M. Survey of promising technologies for 5G networks. Mob. Inf. Syst. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Muchiri, N.; Kimathi, S. A review of applications and potential applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, Rovinj, Croatia, 8–9 September 2016; pp. 280–283. [Google Scholar]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in Smart Farming: A Comprehensive Review. Internet Things 2020, 100187. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Wibowo, S.; Wasimi, S.; Morshed, A.; Xu, C. Machine learning based approach for Weed Detection in Chilli field using RGB images. In Proceedings of the 16th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Xi’an, China, 19–21 December 2020. [Google Scholar]
- Malambo, L.; Popescu, S.C.; Murray, S.C.; Putman, E.; Pugh, N.A.; Horne, D.W.; Richardson, G.; Sheridan, R.; Rooney, W.L.; Avant, R.; et al. Multitemporal field-based plant height estimation using 3D point clouds generated from small unmanned aerial systems high-resolution imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 64, 31–42. [Google Scholar] [CrossRef]
- Chebrolu, N.; Läbe, T.; Stachniss, C. Robust long-term registration of UAV images of crop fields for precision agriculture. IEEE Robot. Autom. Lett. 2018, 3, 3097–3104. [Google Scholar] [CrossRef]
- Popescu, D.; Stoican, F.; Stamatescu, G.; Ichim, L.; Dragana, C. Advanced UAV–WSN System for Intelligent Monitoring in Precision Agriculture. Sensors 2020, 20, 817. [Google Scholar] [CrossRef] [Green Version]
- Raja, L.; Vyas, S. The study of technological development in the field of smart farming. In Smart Farming Technologies for Sustainable Agricultural Development; IGI Global: Hershey, PA, USA, 2019; pp. 1–24. Available online: https://0-www-igi--global-com.brum.beds.ac.uk/chapter/the-study-of-technological-development-in-the-field-of-smart-farming/209543 (accessed on 30 June 2020).
- Spachos, P.; Gregori, S. Integration of wireless sensor networks and smart uavs for precision viticulture. IEEE Internet Comput. 2019, 23, 8–16. [Google Scholar] [CrossRef]
- Hernandez, A.; Murcia, H.; Copot, C.; De Keyser, R. Towards the development of a smart flying sensor: Illustration in the field of precision agriculture. Sensors 2015, 15, 16688–16709. [Google Scholar] [CrossRef] [Green Version]
- Shamshiri, R.R.; Hameed, I.A.; Balasundram, S.K.; Ahmad, D.; Weltzien, C.; Yamin, M. Fundamental research on unmanned aerial vehicles to support precision agriculture in oil palm plantations. In Agricultural Robots-Fundamentals and Application; IntechOpen: London, UK, 2018. [Google Scholar]
- Von Bueren, S.K.; Burkart, A.; Hueni, A.; Rascher, U.; Tuohy, M.P.; Yule, I. Deploying four optical UAV-based sensors over grassland: Challenges and limitations. Biogeosciences 2015, 12, 163–175. [Google Scholar] [CrossRef] [Green Version]
- Islam, N.; Sithamparanathan, K.; Chavez, K.G.; Scott, J.; Eltom, H. Energy efficient and delay aware ternary-state transceivers for aerial base stations. Digit. Commun. Netw. 2019, 5, 40–50. [Google Scholar] [CrossRef]
- Orlando, F.; Movedi, E.; Coduto, D.; Parisi, S.; Brancadoro, L.; Pagani, V.; Guarneri, T.; Confalonieri, R. Estimating leaf area index (LAI) in vineyards using the PocketLAI smart-app. Sensors 2016, 16, 2004. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dadshani, S.; Kurakin, A.; Amanov, S. Non-invasive assessment of leaf water status using a dual-mode microwave resonator. Plant Methods 2015, 11, 8. [Google Scholar] [CrossRef] [Green Version]
- Sahota, H.; Kumar, R.; Kamal, A. A wireless sensor network for precision agriculture and its performance. Wirel. Commun. Mob. Comput. 2011, 11, 1628–1645. [Google Scholar] [CrossRef]
- Vellidis, G.; Garrick, V.; Pocknee, S.; Perry, C.; Kvien, C.; Tucker, M. How wireless will change agriculture. In Proceedings of the Sixth European Conference on Precision Agriculture (6ECPA), Skiathos, Greece, 3–6 June 2007; pp. 57–67. [Google Scholar]
- Islam, N.; Ray, B.; Pasandideh, F. IoT Based Smart Farming: Are the LPWAN Technologies Suitable for Remote Communication? In Proceedings of the 2020 IEEE International Conference on Smart Internet of Things (SmartIoT), Beijing, China, 14–16 August 2020; pp. 270–276. [Google Scholar]
- Crabit, A.; Colin, F.; Bailly, J.S.; Ayroles, H.; Garnier, F. Soft water level sensors for characterizing the hydrological behaviour of agricultural catchments. Sensors 2011, 11, 4656–4673. [Google Scholar] [CrossRef]
- Navulur, S.; Prasad, M.G. Agricultural management through wireless sensors and internet of things. Int. J. Electr. Comput. Eng. 2017, 7, 3492. [Google Scholar] [CrossRef] [Green Version]
- Aasen, H.; Burkart, A.; Bolten, A.; Bareth, G. Generating 3D hyperspectral information with lightweight UAV snapshot cameras for vegetation monitoring: From camera calibration to quality assurance. ISPRS J. Photogramm. Remote Sens. 2015, 108, 245–259. [Google Scholar] [CrossRef]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An automatic random forest-OBIA algorithm for early weed mapping between and within crop rows using UAV imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef] [Green Version]
- Guillén-Climent, M.L.; Zarco-Tejada, P.J.; Berni, J.A.; North, P.R.; Villalobos, F.J. Mapping radiation interception in row-structured orchards using 3D simulation and high-resolution airborne imagery acquired from a UAV. Precis. Agric. 2012, 13, 473–500. [Google Scholar] [CrossRef] [Green Version]
- Pimentel, D. Environmental and economic costs associated with alien invasive species in the United States. In Biological Invasions: Economic and Environmental Costs of Alien Plant, Animal, and Microbe Species; CRC Press: Boca Raton, FL, USA, 2011; pp. 411–430. [Google Scholar]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011; p. 4. [Google Scholar]
- Gao, J.; Nuyttens, D.; Lootens, P.; He, Y.; Pieters, J.G. Recognising weeds in a maize crop using a random forest machine-learning algorithm and near-infrared snapshot mosaic hyperspectral imagery. Biosyst. Eng. 2018, 170, 39–50. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV-based crop and weed classification for smart farming. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar]
- Salaan, C.J.; Tadakuma, K.; Okada, Y.; Sakai, Y.; Ohno, K.; Tadokoro, S. Development and experimental validation of aerial vehicle with passive rotating shell on each rotor. IEEE Robot. Autom. Lett. 2019, 4, 2568–2575. [Google Scholar] [CrossRef]
- Pan, Z.; Lie, D.; Qiang, L.; Shaolan, H.; Shilai, Y.; Yande, L.; Yongxu, Y.; Haiyang, P. Effects of citrus tree-shape and spraying height of small unmanned aerial vehicle on droplet distribution. Int. J. Agric. Biol. Eng. 2016, 9, 45–52. [Google Scholar]
- Aliev, K.; Pasero, E.; Jawaid, M.M.; Narejo, S.; Pulatov, A. Internet of plants application for smart agriculture. Int. J. Adv. Comput. Sci. Appl 2018, 9, 421–429. [Google Scholar] [CrossRef]
- Estrada-López, J.J.; Castillo-Atoche, A.A.; Vázquez-Castillo, J.; Sánchez-Sinencio, E. Smart soil parameters estimation system using an autonomous wireless sensor network with dynamic power management strategy. IEEE Sens. J. 2018, 18, 8913–8923. [Google Scholar] [CrossRef]
- Goap, A.; Sharma, D.; Shukla, A.; Krishna, C.R. An IoT based smart irrigation management system using Machine learning and open source technologies. Comput. Electron. Agric. 2018, 155, 41–49. [Google Scholar] [CrossRef]
- Karagiannis, G.; Altintas, O.; Ekici, E.; Heijenk, G.; Jarupan, B.; Lin, K.; Weil, T. Vehicular networking: A survey and tutorial on requirements, architectures, challenges, standards and solutions. IEEE Commun. Surv. Tutor. 2011, 13, 584–616. [Google Scholar] [CrossRef]
- Atoev, S.; Kwon, K.R.; Lee, S.H.; Moon, K.S. Data analysis of the MAVLink communication protocol. In Proceedings of the 2017 International Conference on Information Science and Communications Technologies (ICISCT), Tashkent, Uzbekistan, 2–4 November 2017; pp. 1–3. [Google Scholar]
- Coombes, M.; Chen, W.H.; Liu, C. Fixed wing uav survey coverage path planning in wind for improving existing ground control station software. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 9820–9825. [Google Scholar]
- Bhandari, S.; Raheja, A.; Chaichi, M.R.; Green, R.L.; Do, D.; Pham, F.H.; Ansari, M.; Wolf, J.G.; Sherman, T.M.; Espinas, A. Lessons learned from uav-based remote sensing for precision agriculture. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018; pp. 458–467. [Google Scholar]
- Alsalam, B.H.Y.; Morton, K.; Campbell, D.; Gonzalez, F. Autonomous UAV with vision based on-board decision making for remote sensing and precision agriculture. In Proceedings of the 2017 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2017; pp. 1–12. [Google Scholar]
- Saha, A.K.; Saha, J.; Ray, R.; Sircar, S.; Dutta, S.; Chattopadhyay, S.P.; Saha, H.N. IOT-based drone for improvement of crop quality in agricultural field. In Proceedings of the 2018 IEEE 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 612–615. [Google Scholar]
- Nair, K.K.; Abu-Mahfouz, A.M.; Lefophane, S. Analysis of the Narrow Band Internet of Things (NB-IoT) Technology. In Proceedings of the 2019 Conference on Information Communications Technology and Society (ICTAS), Durban, South Africa, 6–8 March 2019; pp. 1–6. [Google Scholar]
- Murdyantoro, E.; Nugraha, A.W.W.; Wardhana, A.W.; Fadli, A.; Zulfa, M.I. A review of LoRa technology and its potential use for rural development in Indonesia. AIP Conf. Proc. 2019, 2094, 020011. [Google Scholar]
- Association, G. 5G Spectrum-Public Policy Position; White Paper; GSMA: London, UK, 2016. [Google Scholar]
- Foubert, B.; Mitton, N. Long-Range Wireless Radio Technologies: A Survey. Future Internet 2020, 12, 13. [Google Scholar] [CrossRef] [Green Version]
- Liberg, O.; Sundberg, M.; Wang, E.; Bergman, J.; Sachs, J. Cellular Internet of Things: Technologies, Standards, and Performance; Academic Press: London, UK, 2017. [Google Scholar]
- Sanchez-Gomez, J.; Gallego-Madrid, J.; Sanchez-Iborra, R.; Santa, J.; Skarmeta, A.F. Impact of SCHC Compression and Fragmentation in LPWAN: A Case Study with LoRaWAN. Sensors 2020, 20, 280. [Google Scholar] [CrossRef] [Green Version]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A study of LoRa: Long range & low power networks for the internet of things. Sensors 2016, 16, 1466. [Google Scholar]
- Andrade, R.O.; Yoo, S.G. A Comprehensive Study of the Use of LoRa in the Development of Smart Cities. Appl. Sci. 2019, 9, 4753. [Google Scholar] [CrossRef] [Green Version]
- Khanna, A.; Kaur, S. Evolution of Internet of Things (IoT) and its significant impact in the field of Precision Agriculture. Comput. Electron. Agric. 2019, 157, 218–231. [Google Scholar] [CrossRef]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An overview of Internet of Things (IoT) and data analytics in agriculture: Benefits and challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. A comparative study of LPWAN technologies for large-scale IoT deployment. ICT Express 2019, 5, 1–7. [Google Scholar] [CrossRef]
- Mekki, K.; Bajic, E.; Chaxel, F.; Meyer, F. Overview of cellular LPWAN technologies for IoT deployment: Sigfox, LoRaWAN, and NB-IoT. In Proceedings of the 2018 IEEE International Conference on Pervasive Computing and Communications Workshops (Percom Workshops), Athens, Greece, 19–23 March 2018; pp. 197–202. [Google Scholar]
- Zhou, W.; Tong, Z.; Dong, Z.Y.; Wang, Y. LoRa-hybrid: A LoRaWAN based multihop solution for regional microgrid. In Proceedings of the 2019 IEEE 4th International Conference on Computer and Communication Systems (ICCCS), Singapore, 23–25 February 2019; pp. 650–654. [Google Scholar]
- Chen, X.; Li, Z.; Chen, Y.; Wang, X. Performance analysis and uplink scheduling for QoS-aware NB-IoT networks in mobile computing. IEEE Access 2019, 7, 44404–44415. [Google Scholar] [CrossRef]
- Chauhan, R. 11 Myths about LoRaWAN. 2018. Available online: https://www.electronicdesign.com/industrial-automation/article/21806072/11-myths-about-lorawan (accessed on 11 February 2020).
- O’Grady, M.; Langton, D.; O’Hare, G. Edge computing: A tractable model for smart agriculture? Artif. Intell. Agric. 2019, 3, 42–51. [Google Scholar] [CrossRef]
- Vondrouš, O.; Kocur, Z.; Hégr, T.; Slavíček, O. Performance evaluation of IoT mesh networking technology in ISM frequency band. In Proceedings of the 2016 17th International Conference on Mechatronics-Mechatronika (ME), Prague, Czech Republic, 7–9 December 2016; pp. 1–8. [Google Scholar]
- Lee, H.; Ke, K. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- Basford, P.J.; Bulot, F.M.; Apetroaie-Cristea, M.; Cox, S.J.; Ossont, S.J. LoRaWAN for Smart City IoT Deployments: A Long Term Evaluation. Sensors 2020, 20, 648. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmad, A.I.; Ray, B.; Chowdhury, M. Performance Evaluation of LoRaWAN for Mission-Critical IoT Networks. In Future Network Systems and Security; Doss, R., Piramuthu, S., Zhou, W., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 37–51. [Google Scholar]
- Baddula, M.; Ray, B.; Chowdhury, M. Performance Evaluation of Aloha and CSMA for LoRaWAN Network. In Proceedings of the 6th IEEE International Conference on Sustainable Technology and Engineering 2020 (i-COSTE 2020), Online, Gold Coast, Australia, 16–18 December 2020; pp. 96–101. [Google Scholar]
- Lamb, D.W. Accelerating Precision Agriculture to Decision Agriculture: A Review of On-Farm Telecommunications Challenges and Opportunities in Supporting a Digital Agriculture Future for Australia; Sugar Research: Indooroopilly, Australia, 2017. [Google Scholar]
- Hobby, R. An introduction to the Iridium (R) system. In Proceedings of the IEE Colloquium on Communication Opportunities Offered by Advanced Satellite Systems-Day 1 (Ref. No. 1998/484), London, UK, 13 October 1998; IET: London, UK, 1998; p. 1. [Google Scholar]
- Nishiyama, H.; Kudoh, D.; Kato, N.; Kadowaki, N. Load balancing and QoS provisioning based on congestion prediction for GEO/LEO hybrid satellite networks. Proc. IEEE 2011, 99, 1998–2007. [Google Scholar] [CrossRef]
- Evans, J. Satellite systems for personal communications. IEEE Antennas Propag. Mag. 1997, 39, 7–20. [Google Scholar] [CrossRef]
- Wang, C.; Feng, Y.; Higgins, M.; Looi, M. Communication infrastructure study for precise positioning services in regional Queensland. In Proceedings of the International Global Navigation Satellite Systems Society Symposium, IGNSS, Surfers Paradise, Australia, 18 February 2009; pp. 1–22. [Google Scholar]
- Abutaleb, M.G.; Jacobson, J.R.; McConnell, D.E.; Crichton, J.C.; Stephenson, G., III. System and Method for Inmarsat Capacity Expansion and Control. U.S. Patent 7,068,971, 27 June 2006. [Google Scholar]
- Gehly, S.; Carter, B.; Yang, Y.; Cai, H.; May, S.L.; Norman, R.; Currie, J.; Adamos, B.; Daquin, J.; Linares, R.; et al. Space Object Tracking from the Robotic Optical Observatory at RMIT University. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 11–14 September 2018. [Google Scholar]
- Dimc, F.; Baldini, G.; Kandeepan, S. Experimental detection of mobile satellite transmissions with cyclostationary features. Int. J. Satell. Commun. Netw. 2015, 33, 163–183. [Google Scholar] [CrossRef]
- Islam, N.; Alazab, A.; Agbinya, J. Energy Efficient and Delay Aware 5G Multi-Tier Network. Remote Sens. 2019, 11, 1019. [Google Scholar] [CrossRef] [Green Version]
- Islam, N.; Alazab, A.; Alazab, M. A Reinforcement Learning Based Algorithm Towards Energy Efficient 5G Multi-Tier Network. In Proceedings of the 2019 Cybersecurity and Cyberforensics Conference (CCC), Melbourne, VIC, Australia, 8–9 May 2019; pp. 96–101. [Google Scholar]
- Gupta, M.; Abdelsalam, M.; Khorsandroo, S.; Mittal, S. Security and privacy in smart farming: Challenges and opportunities. IEEE Access 2020, 8, 34564–34584. [Google Scholar] [CrossRef]
- El Merabet, H.; Hajraoui, A. A survey of malware detection techniques based on machine learning. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 366–373. [Google Scholar] [CrossRef]
- Watson, M.R.; Marnerides, A.K.; Mauthe, A.; Hutchison, D. Malware detection in cloud computing infrastructures. IEEE Trans. Dependable Secur. Comput. 2015, 13, 192–205. [Google Scholar] [CrossRef] [Green Version]
- Wolfert, S.; Ge, L.; Verdouw, C.; Bogaardt, M.J. Big data in smart farming—A review. Agric. Syst. 2017, 153, 69–80. [Google Scholar] [CrossRef]
- Dadashzadeh, M.; Abbaspour-Gilandeh, Y.; Mesri-Gundoshmian, T.; Sabzi, S.; Hernández-Hernández, J.L.; Hernández-Hernández, M.; Arribas, J.I. Weed Classification for Site-Specific Weed Management Using an Automated Stereo Computer-Vision Machine-Learning System in Rice Fields. Plants 2020, 9, 559. [Google Scholar] [CrossRef]
- Alam, M.; Alam, M.S.; Roman, M.; Tufail, M.; Khan, M.U.; Khan, M.T. Real-Time Machine-Learning Based Crop/Weed Detection and Classification for Variable-Rate Spraying in Precision Agriculture. In Proceedings of the 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020; pp. 273–280. [Google Scholar]
- Abd El-Ghany, N.M.; Abd El-Aziz, S.E.; Marei, S.S. A review: Application of remote sensing as a promising strategy for insect pests and diseases management. In Environmental Science and Pollution Research; Springer: Berlin/Heidelberg, Germany, 2020; pp. 1–13. [Google Scholar]
- Satapathy, R.R. Remote sensing in plant disease management. J. Pharmacogn. Phytochem. 2020, 9, 1813–1820. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acronym | Definition |
|---|---|
| 3GPP | 3rd Generation Partnership Project |
| AI | Artificial Intelligence |
| AIoT | Agricultural IoT |
| BPSK | Binary Phase Shif Keying |
| GCS | Ground control station |
| IoT | Internet of Things |
| LPWAN | Low Power Wide Area Network |
| LOS | Line of Sight |
| LoRa | Long Range |
| LoRaWAN | Long Range Wide Area Network |
| M2M | Machine to machine |
| NFC | Near Field Communication |
| NBIoT | Narrow Band IoT |
| QoS | Quality of Service |
| RFID | Radio Frequency IDentification |
| UAV | Unmanned Aerial Vehicle |
| UNB | Ultra Narrow Band |
| UWB | Ultra WideBand |
| WSN | Wireless Sensor Network |
| NB-IoT | SigFox | LoRa | |
|---|---|---|---|
| Modulation | QPSK | BPSK | CSS |
| Interference immunity | Low | Very High | Very High |
| Localization | Yes (TDOA) | Yes (RSSI) | Not supported |
| Standardization | 3GPP | SigFox company with ETSI | LoRa-Alliance |
| Maximum data rate | 200 kbps | 100 kbps | 50 kbps |
| Bidirectional | Yes/Half-duplex | Limited/Half-duplex | Yes/Half-duplex |
| Maximum message/day | Unlimited | 140 (UL), 4 (DL) | Unlimited |
| Maximum payload length | 1600 bytes | 12 bytes (UL) | 243 bytes |
| 8 bytes (DL) | |||
| Coverage | 164 dB | 160 dB | 157 dB |
| Power Consumption | Very low | Low | Low |
| Security | Very High | Low | Low |
| Bandwidth | 200 kHz | 100 kHz | 250 kHz and 125 kHz |
| Frequency | Licensed LTE Frequency | ISM Band 433, 868, 915 MHz | ISM Band 433, 868, 915 MHz |
| Technology | OpenLTE | Proprietary | Proprietary |
| Spectrum | Licensed | Unlicensed | Unlicensed |
| Topology | Star | Star | Star |
| Downlink Data Rate | 0.5–200 kbps | 0.1 kbps | 0.3–50 kbps |
| Uplink Data Rate | 0.2–180 kbps | 0.1 kbps | 0.3–50 kbps |
| Range | 1 km (urban) | 10 km (urban) | 5 km (urban) |
| 10 km (rural) | 40 km (rural) | 20 km (rural) | |
| Duty Cycle Restriction | No | Yes | Yes |
| Output Power | 23 dBm | 14 dBm | 14 dBm |
| Battery Lifespan | years | years | years |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. https://0-doi-org.brum.beds.ac.uk/10.3390/su13041821
Islam N, Rashid MM, Pasandideh F, Ray B, Moore S, Kadel R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability. 2021; 13(4):1821. https://0-doi-org.brum.beds.ac.uk/10.3390/su13041821
Chicago/Turabian StyleIslam, Nahina, Md Mamunur Rashid, Faezeh Pasandideh, Biplob Ray, Steven Moore, and Rajan Kadel. 2021. "A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming" Sustainability 13, no. 4: 1821. https://0-doi-org.brum.beds.ac.uk/10.3390/su13041821