
Development of a Rainfall and Runoff Simulator for Performing Hydrological and Geotechnical Tests

 , , ,
, , ,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Construction of the Components of the RS
2.1.1. Structural Frame and Specimen Container
2.1.2. Rainfall Generator
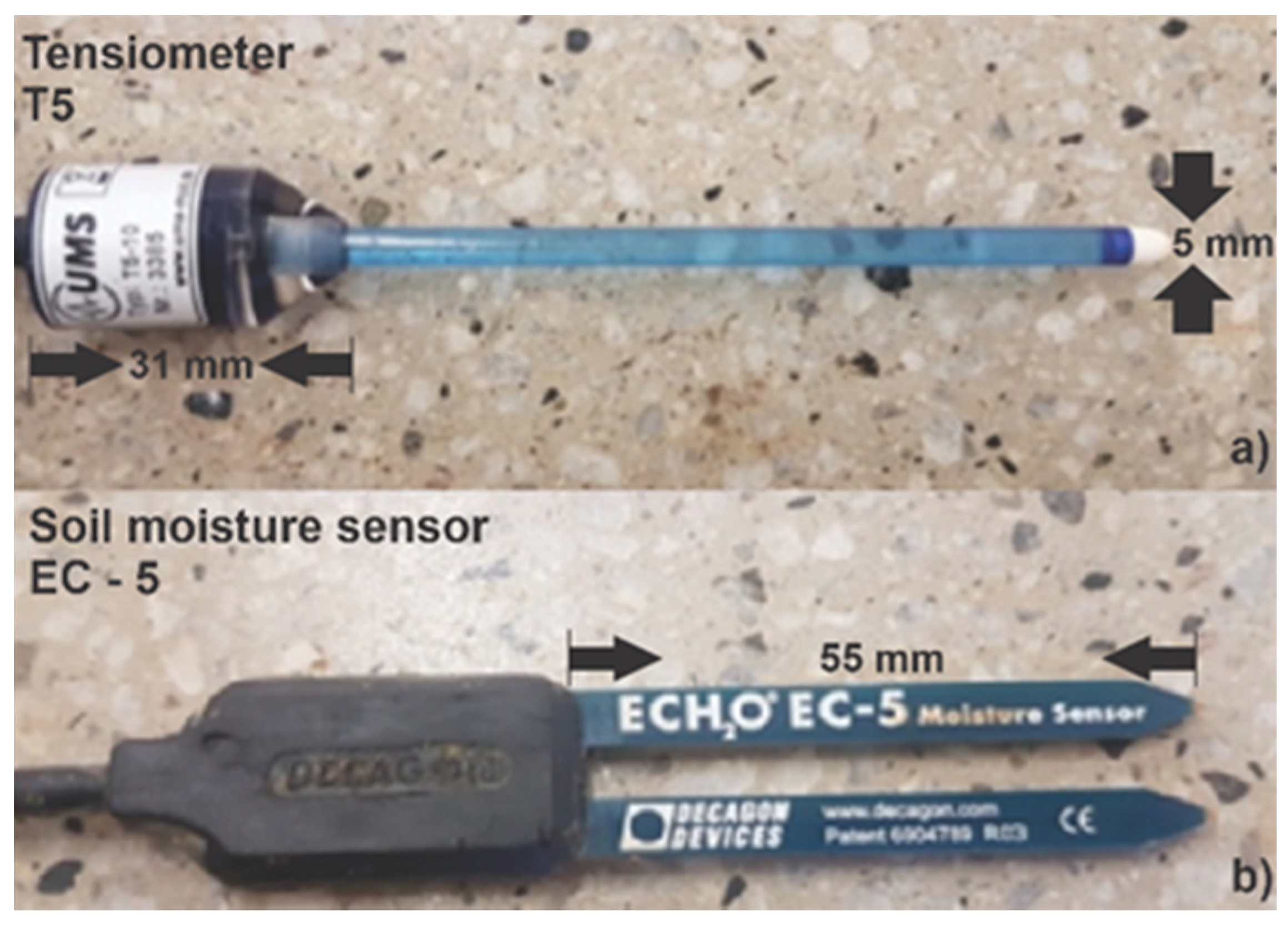
2.1.3. Instrumentation and Data Acquisition System
2.2. Calibration of the Rainfall and Runoff Simulator
2.2.1. Calibration of the Rainfall Generator
2.2.2. Calibration of the Soil Volumetric Water Content Sensors
2.2.3. Saturation of the Tensiometers
2.3. Operation
2.3.1. Apparatus Module
2.3.2. Monitoring Module
2.3.3. Rainfall Generator Module
3. Results and Discussions
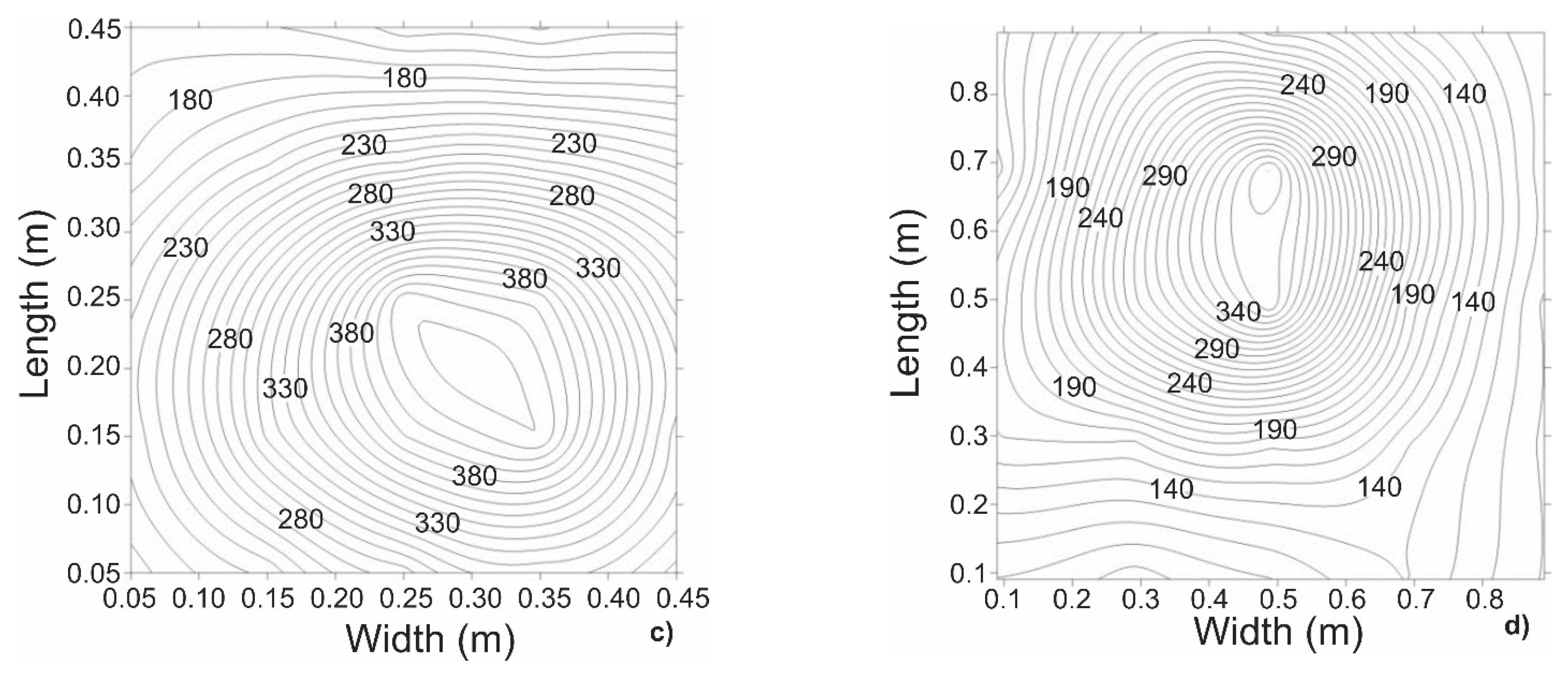
3.1. Evaluation of the Intensity and Uniformity of the Simulated Rainfall
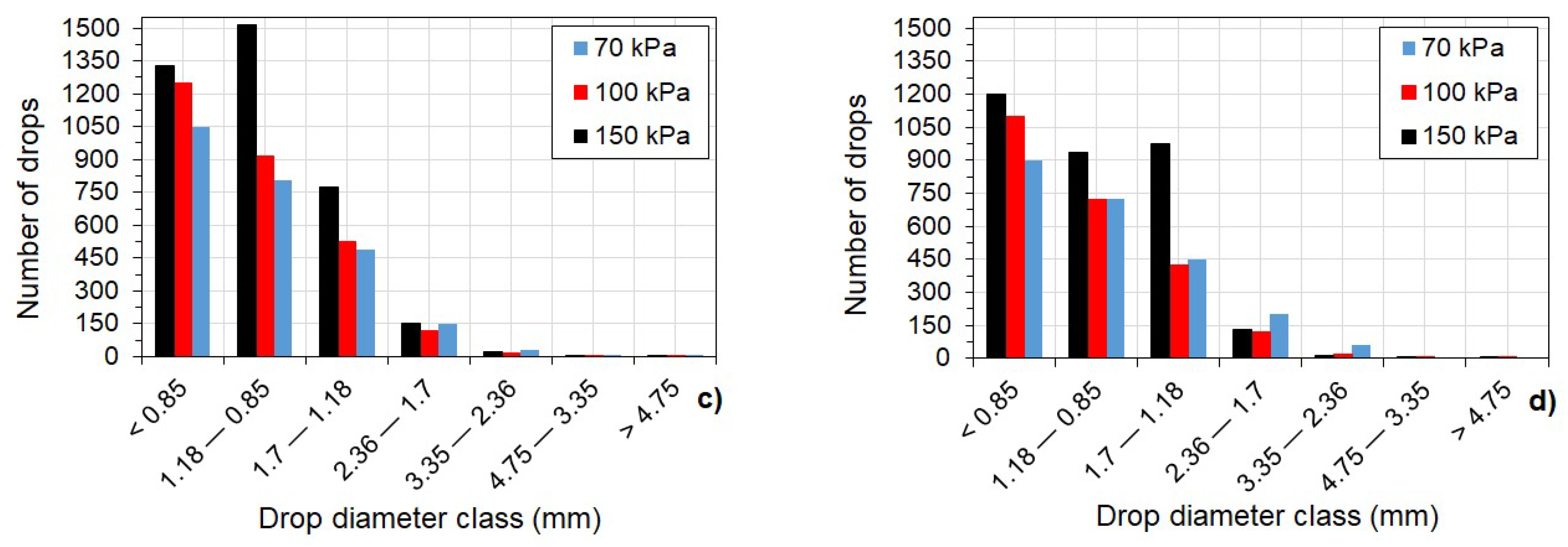
3.2. Evaluation of the Simulated Raindrop Characteristics
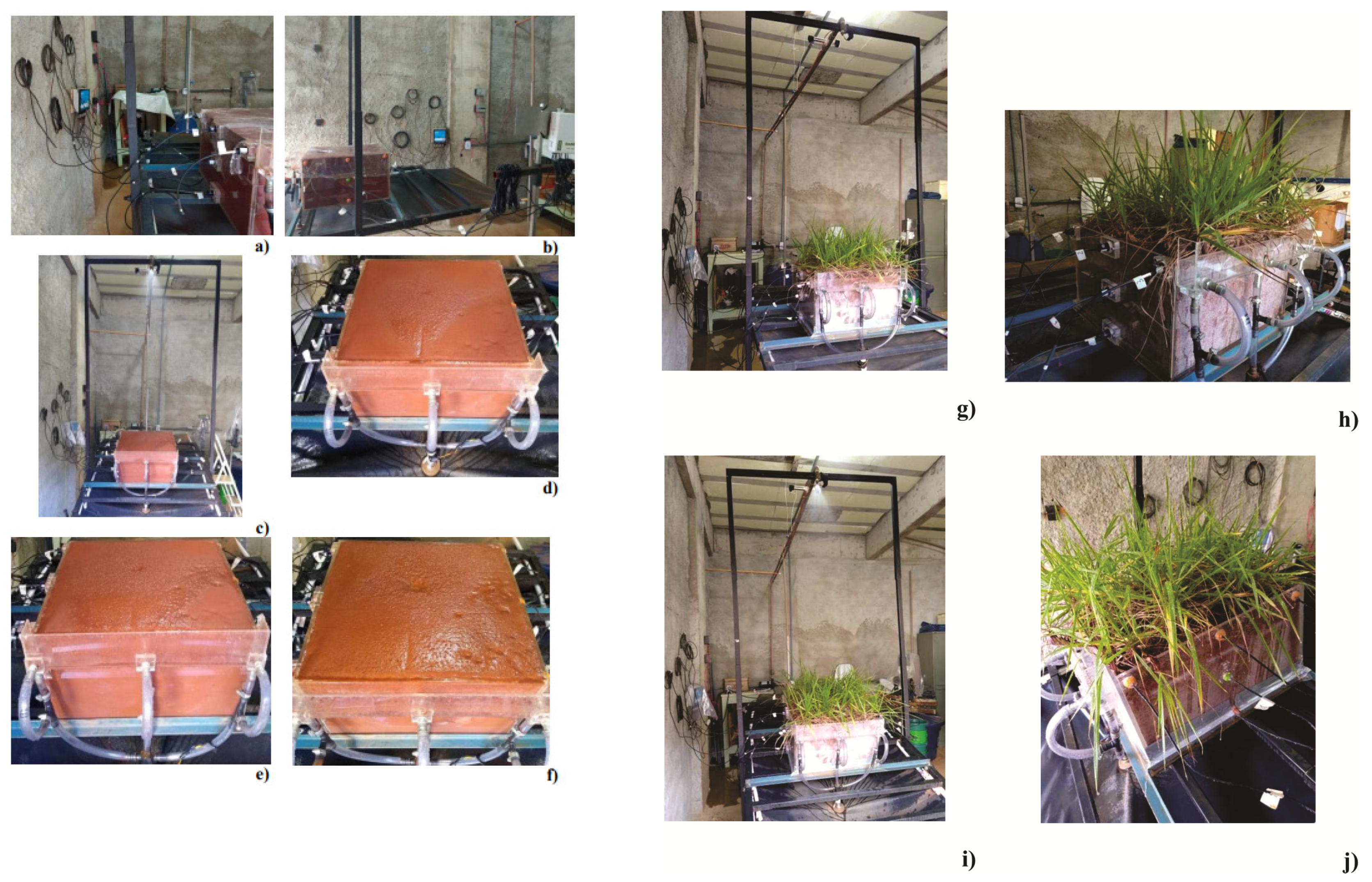
3.3. Evaluation of the RS under Real Testing Conditions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aksoy, H.; Unal, N.E.; Cokgor, S.; Gedikli, A.; Yoon, J.; Koca, K.; Inci, S.B.; Eris, E. A rainfall simulator for laboratory-scale assessment of rainfall-runoff-sediment transport processes over a two-dimensional flume. Catena 2012, 98, 63–72. [Google Scholar] [CrossRef]
- Spohr, R.; Corcini, A.; Pellegrin, J.; Bonfanti, J.; Soto, M.; Cardoso, T. Development and validation of a portable rainfall simulator. Braz. J. Water Resour. 2015, 20, 411–417. [Google Scholar]
- Sousa Júnior, S.F.D.; Mendes, T.A.; Siqueira, E.Q.D. Development and calibration of a rainfall simulator for hydrological studies. Braz. J. Water Resour. 2017, 22, e59. [Google Scholar] [CrossRef] [Green Version]
- Boughton, W.; Droop, O. Continuous simulation for design flood estimation—A review. Environ. Modell. Softw. 2003, 18, 309–318. [Google Scholar] [CrossRef]
- Pathiraja, S.; Westra, S.; Sharma, A. Why continuous simulation? The role of antecedent moisture in design flood estimation. Water Resour. Res. 2012, 48, W06534. [Google Scholar] [CrossRef] [Green Version]
- Callau Poduje, A.C.; Haberlandt, U. Short time step continuous rainfall modelling and simulation of extreme events. J. Hydrol. 2017, 552, 182–197. [Google Scholar] [CrossRef]
- Paz, F.; Bautista, E.L.; Sosa, I.M. Validación del modelo expo-lineal precipitación-escurrimiento en un simulador de lluvia. Terra Latinoam. 2017, 35, 329–341. [Google Scholar]
- Rowe, T.J.; Smithers, J.C. Continuous simulation modelling for design flood estimation—A South African perspective and recommendations. Water SA 2018, 44, 691–705. [Google Scholar] [CrossRef] [Green Version]
- Winter, B.; Schneeberger, K.; Dung, N.V.; Huttenlau, M.; Achleitner, S.; Stötter, J.; Merz, B.; Vorogushyn, S. A continuous modelling approach for design flood estimation on sub-daily timescale. Sci. J. 2019, 64, 539–554. [Google Scholar]
- Grimaldi, S.; Nardi, F.; Piscopia, R.; Petroselli, A.; Apollonio, C. Continuous hydrologic modelling for design simulation in small and ungauged basins: A step forward and some tests for its practical use. J. Hydrol. 2020, 125664. [Google Scholar] [CrossRef]
- Petroselli, A.; Piscopia, R.; Grimaldi, S. Design discharge estimation in small and ungauged basins: EBA4SUB framework sensitivity analysis. J. Agric. Eng. 2020, 51, 107–118. [Google Scholar] [CrossRef]
- Miyazaki, T. Water Flow in Soils; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Egeli, I.; Pulat, H.F. Mechanism and modelling of shallow soil slope stability during high intensity and short duration rainfall. Sci. Iran. 2011, 18, 1179–1187. [Google Scholar] [CrossRef] [Green Version]
- Mendes, T.A. Physical and Numerical Modeling of Infiltration and Runoff in Unsaturated and Vegetative Coverage Surfaces. Ph.D. Thesis, Department of Civil and Environmental Engineering, University of Brasilia, Brasília, Brazil, 2019. [Google Scholar]
- Mendes, T.A.; Gitirana, G.F.N.; Rebolledo, J.F.R.; Vaz, E.F.; Da Luz, M.P. Numerical evaluation of laboratory apparatuses for the study of infiltration and runoff. Braz. J. Water Resour. 2020, 25, e37. [Google Scholar] [CrossRef]
- Melo, M.T.; Palmeira, E.M.; Santos, E.C.; da Luz, M.P. Geosynthetic performance against slope erosion caused by high intensity rainfall. Geosynth. Int. 2020, 27, 1–49. [Google Scholar]
- Montebeller, C.A.; Carvalho, D.F.D.; Alves Sobrinho, T.; Nunes, A.C.D.S.; Rubio, E. Hydraulic evaluation of a pendulum rainfall simulator. Braz. J. Agric. Environ. Eng. 2001. [Google Scholar] [CrossRef] [Green Version]
- Schaefer, C.E.R.; Silva, D.D.; Paiva, K.W.N.; Pruski, F.F.; Alburqueque Filho, M.R.; Alburqueque, M.A. Soil, nutrient and organic matter losses in a Red-Yellow Podzolic under simulated rainfall. Braz. J. Agric. Res. 2002, 37, 669–678. [Google Scholar]
- Alves Sobrinho, T.; Gómez-Macpherson, H.; Gómez, J.A. A portable integrated rainfall and overland flow simulator. Soil Use Manag. 2008, 24, 163–170. [Google Scholar] [CrossRef]
- Abudi, I.; Carmi, G.; Berliner, P. Rainfall simulator for field runoff studies. J. Hydrol. 2012, 454–455, 76–81. [Google Scholar] [CrossRef]
- Almeida, W.S.; Carvalho, D.F.; Panachuki, E.; Valim, W.C.; Rodrigues, S.A.; Varella, C.A.A. Hydraulic erosion in different tillage systems and soil cover. Braz. J. Agric. Res. 2016, 51, 1110–1119. [Google Scholar]
- Moraes, A.G.L.; Carvalho, D.F.C.; Antunes, M.A.H.; Ceddia, M.B. Relationship between remote sensing data and field-observed interril erosion. Braz. J. Agric. Res. 2018, 53, 332–341. [Google Scholar] [CrossRef] [Green Version]
- Von Bennewitz, E.; Aladro, J. The effects of rainfall intensity and rock fragment cover on soil hydrological responses in Central Chile. J. Soil Sci. Plant Nutr. 2017, 17, 781–793. [Google Scholar] [CrossRef] [Green Version]
- Pellat, F.P.; Solís, H.D. Relaciones entre la precipitación, producción de biomasa e índices espectrales de la vegetación: Alcances y limitaciones. Terra Latinoam. 2018, 36, 153–168. [Google Scholar] [CrossRef] [Green Version]
- Shao, Q.; Baumgartl, T. Estimating input parameters for four infiltration models from basic soil, vegetation, and rainfall properties. Soil Sci. Soc. Am. J. 2014, 78, 1507–1521. [Google Scholar] [CrossRef]
- Rahardjo, H.; Krisnanto, S.; Leong, E. Effectiveness of capillary barrier and vegetative slope covers in maintaining soil suction. Soils Rocks 2016, 39, 51–69. [Google Scholar]
- Araújo, A.G. Analysis of the Performance of Infiltration Wells in the City of Goiânia-GO. Master’s Thesis, Federal University of Goiás, Goiânia, Brazil, 2013. [Google Scholar]
- Herngren, L.F. Build-Up and Wash-Off Process Kinetics of Paths and Heavy Metals on Paved Surfaces Using Simulated Rainfall. Ph.D. Thesis, Queensland University of Technology, Brisbane, QLD, Australia, 2005. [Google Scholar]
- Egodawatta, P. Translation of Small-Plot Scale Pollutant Build-Up and Wash-Off Measurements to Urban Catchment Scale. Ph.D. Thesis, Queensland University of Technology, Brisbane, QLD, Australia, 2007. [Google Scholar]
- Egodawatta, P.; Thomas, E.; Goonetilleke, A. Mathematical interpretation of pollutant wash-off from urban road surfaces using simulated rainfall. Water Res. 2007, 41, 3025–3031. [Google Scholar] [CrossRef] [Green Version]
- Egodawatta, P.; Thomas, E.; Goonetilleke, A. Understanding the physical processes of pollutant build-up and wash-off on roof surfaces. Sci. Total Environ. 2009, 407, 1834–1841. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Minguntanna, N.S. Determining a Set of Surrogate Parameters to Evaluate Urban Stormwater Quality. Master’s Thesis, Faculty of Built Environment and Engineering, Queensland University of Technology, Brisbane, QLD, Australia, 2009. [Google Scholar]
- Seeger, M. Uncertainty of factors determining runoff and erosion processes as quantified by rainfall simulations. Catena 2007, 71, 56–67. [Google Scholar] [CrossRef]
- SKZ—Das Kunststoff-Zentrum. Erarbeitung und Verifizierung von Auswahlkriterien für Geosynthetische Erosionsschutzsysteme; Fördergemeinschaft für das Süddeutsche Kunststoff-Zentrum: Würzburg, Germany, 2011. [Google Scholar]
- Zhang, X.; Yu, G.; Li, Z.B.; Li, P. Experimental study on slope runoff, erosion and sediment under different vegetation types. Water Resour. Manag. 2014, 28, 2415–2433. [Google Scholar] [CrossRef]
- Sadeghi, S.H.R.; Gholami, L.; Sharifi, E.; Khaledi Darvishan, A.; Homaee, M. Scale effect on runoff and soil loss control using rice straw mulch under laboratory conditions. Solid Earth 2015, 6, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Lassu, T.; Seeger, M.; Peters, P.; Keesstra, S.D. The Wageningen rainfall simulator: Set-up and calibration of an indoor nozzle-type rainfall simulator for soil erosion studies. Land Degrad. Dev. 2015, 26, 604–612. [Google Scholar] [CrossRef]
- Fernández-Raga, M.; Campo, J.; Rodrigo-Comino, J.; Keesstra, S.D. Comparative analysis of splash erosion devices for rainfall simulation experiments: A laboratory study. Water 2019, 11, 1228. [Google Scholar] [CrossRef] [Green Version]
- Cecconi, M.; Napoli, P.; Pane, V. Effects of soil vegetation on shallow slope instability. Environ. Geotech. 2015, 2, 130–136. [Google Scholar] [CrossRef]
- Montrasio, L.; Schilirò, L.; Terrane, A. Physical and numerical modelling of shallow landslides. Landslides 2016, 13, 873–883. [Google Scholar] [CrossRef]
- Römkens, M.J.; Helming, K.; Prasad, S. Soil erosion under different rainfall intensities, surface roughness, and soil water regimes. Catena 2002, 46, 103–123. [Google Scholar] [CrossRef]
- Montoya-Dominguez, J.D.; García-Aristizábal, E.F.; Vega-Posada, C.A. One-Dimensional Experimental Study of Rainfall Infiltration into Unsaturated Soil; Revista Facultad de Ingeniería, Universidad de Antioquia: Medellín, Colombia, 2017. [Google Scholar]
- Martinez, G.; Weltz, M.; Pierson, F.B.; Spaeth, K.E.; Pachepsky, Y. Scale effects on runoff and soil erosion in rangelands: Observations and estimations with predictors of different availability. Catena 2017, 151, 161–173. [Google Scholar] [CrossRef]
- PDE Solutions. Flexpde 7.12—Reference Manual; PDE Solutions Inc.: Antioch, CA, USA, 2016. [Google Scholar]
- Costa, A.R.; Prado, L.A. Espacialização de chuvas intensas para o estado de Goiás e sul de Tocantins. Rev. Eng. Agrícola 2003, 23, 268–276. [Google Scholar]
- Reatto, A.; Bruand, A.; Silva, E.D.; Martins, E.S.; Brossard, M. Hydraulic properties of the diagnostic horizon of Latosols of a regional toposequence across the Brazilian Central Plateau. Geoderma 2007, 139, 51–59. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, T.T.; Weiss, L.A.; Teixeira, R.S.; Branco, C.J.M.C. Permeabilidade de solo laterítico por diferentes métodos. Semina Ciências Exatas Tecnológicas 2015, 36, 17–32. [Google Scholar] [CrossRef] [Green Version]
- Soto, M.A.A.; Kiang, C.H. Avaliação da condutividade hidráulica em dois usos do solo na região central do Brasil. Revista Brasileira Ciências Ambient. 2018, 47, 1–11. [Google Scholar] [CrossRef]
- Decagon Devices Inc. Soil Moisture Sensors: User’s Manual; Decagon Device Inc.: Pullman, WA, USA, 2008. [Google Scholar]
- UMS. User’s Manual—T5 Tensiometer. Available online: http://library.metergroup.com/Manuals/UMS/T5_Manual.pdf (accessed on 5 March 2021).
- Van Dijk, A.I.J.M.; Bruijnzeel, L.A.; Rosewell, C.J. Rainfall Intensity—Kinetic Energy Relationships: A Critical Literature Appraisal. J. Hydrol. 2002, 261, 1–23. [Google Scholar] [CrossRef]
- Meyer, L.D.; Harmon, W.C. Multiple-intensity rainfall simulator for erosion research on roe side slopes. ASAE 1978, 77, 100–104. [Google Scholar]
- Tossell, R.W.; Dickinson, W.T.; Rudra, R.P.; Wall, G.J. A portable rainfall simulator. Can. Agric. Eng. Guelph 1987, 29, 155–162. [Google Scholar]
- Bentley, W.A. Studies of raindrops and raindrop phenomena. Mon. Weather. Rev. 1940, 32, 450–456. [Google Scholar]
- Hudson, N.W. Raindrop size distribution in high intensity storms. Rhod. J. Agric. Res. 1963, 1, 6–11. [Google Scholar]
- Hudson, N.W. The Flour Pellet Method for Measuring the Size of Raindrops; Department of Conservation and Extension: Harare, Zimbabwe, 1964. [Google Scholar]
- Kincaid, D.C.; Solomon, K.H.; Oliphant, J.C. Drop size distributions for irrigation sprinkler. Trans. ASAE 1996, 39, 839–845. [Google Scholar] [CrossRef]
- Pérez-Latorre, F.J.; de Castro, L.; Delgado, A. A comparison of Two Variable Intensity Rainfall Simulators for Runoff Studies. Soil Tillage Res. 2010, 107, 11–16. [Google Scholar] [CrossRef]
- Fukui, Y.; Nakanish, K.; Okamura, S. Computer evaluation of sprinkler irrigation uniformity. Irrig. Sci. 1980, 2, 23–32. [Google Scholar] [CrossRef]
- Miller, W.P. A solenoid-operated, variable intensity rainfall simulator. Soil Sci. Am. J. 1987, 51, 832–834. [Google Scholar] [CrossRef]
- Aksoy, H.; Gedikli, A.; Unal, N.E.; Yilmaz, M.; Eris, E.; Yoon, J.; Tayfur, G. Rainfall-runoff model considering microtopography simulated in a laboratory erosion flume. Water Resour. Manag. 2016, 30, 5609–5624. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Ko, T.; Jeong, H.; Ye, S. The development of a methodology for calibrating a large-scale laboratory rainfall simulator. Atmosphere 2018, 9, 427. [Google Scholar] [CrossRef] [Green Version]
- Christiansen, J.P. Irrigation by Sprinkling; University of California: Oakland, CA, USA, 1942. [Google Scholar]
- Li, J.; Kawano, H. Simulating water-drop movement from noncircular sprinkler nozzles. J. Irrig. Drain. Eng. N. Y. 1995, 121, 152–158. [Google Scholar] [CrossRef]
- Beard, K.V.; Chuang, C. A new model for the equilibrium shape of raindrops. J. Atmos. Sci. 1987, 44, 1509–1524. [Google Scholar] [CrossRef]
- Fernández-Raga, M.; Fraile, R.; Keizer, J.J.; Teijeiro, M.E.V.; Castro, A.; Palencia, C.; Marques, R.L.D.C. The kinetic energy of rain measured with an optical disdrometer: An application to splash erosion. Atmos. Res. 2010, 96, 225–240. [Google Scholar] [CrossRef]
- Kathiravelu, G.; Lucke, T.; Nichols, P. Rain Drop Measurement Techniques: A Review. J. Water 2016, 8, 20. [Google Scholar] [CrossRef] [Green Version]
- Brodie, I.; Rosewell, C. Theoretical Relationships between Rainfall Intensity and Kinetic Energy Variants Associated with Stomwater Particle Washoff. J. Hydrol. 2007, 340, 40–47. [Google Scholar] [CrossRef]
- Yakubu, M.L.; Yusop, Z. Adaptability of rainfall simulators as a research tool on urban sealed surfaces—A review. Hydrol. Sci. J. 2017, 62, 996–1012. [Google Scholar] [CrossRef]
- Greco, R.; Guida, A.; Damiano, E.; Olivares, L. Soil water content and suction monitoring in model slopes for shallow flowslides early warning applications. Phys. Chem. Earth 2010, 35, 127–136. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ta (s) | tf (s) | train (min) | Ir (mm h−1) | HL (mm) | Vc (L) | Qc (L min−1) | Qc5 (L min−1) | ξr (%) |
|---|---|---|---|---|---|---|---|---|
| 2 | 3 | 5 | 137 | 16 | 0.277 | 0.055 | 0.040 | 27.8 |
| 10 | 120 | 20 | 0.477 | 0.048 | 0.050 | 4.8 | ||
| 30 | 116 | 58 | 1.314 | 0.044 | 0.043 | 1.8 | ||
| 2 | 5 | 30 | 86 | 43 | 0.857 | 0.029 | 0.028 | 2.0 |
| 60 | 86 | 86 | 1.601 | 0.027 | 0.026 | 2.6 | ||
| 3 | 2 | 15 | 188 | 47 | 0.876 | 0.058 | 0.057 | 2.4 |
| 30 | 174 | 87 | 3.127 | 0.104 | 0.103 | 1.2 | ||
| 5 | 1 | 30 | 234 | 117 | 5.103 | 0.170 | 0.166 | 2.4 |
| 60 | 227 | 227 | 8.082 | 0.135 | 0.115 | 14.6 | ||
| 5 | 10 | 30 | 92 | 46 | 0.915 | 0.031 | 0.032 | 4.9 |
| 60 | 91 | 91 | 1.892 | 0.032 | 0.031 | 1.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mendes, T.A.; Pereira, S.A.d.S.; Rebolledo, J.F.R.; Gitirana, G.d.F.N., Jr.; Melo, M.T.d.S.; Luz, M.P.d. Development of a Rainfall and Runoff Simulator for Performing Hydrological and Geotechnical Tests. Sustainability 2021, 13, 3060. https://0-doi-org.brum.beds.ac.uk/10.3390/su13063060
Mendes TA, Pereira SAdS, Rebolledo JFR, Gitirana GdFN Jr., Melo MTdS, Luz MPd. Development of a Rainfall and Runoff Simulator for Performing Hydrological and Geotechnical Tests. Sustainability. 2021; 13(6):3060. https://0-doi-org.brum.beds.ac.uk/10.3390/su13063060
Chicago/Turabian StyleMendes, Thiago Augusto, Sávio Aparecido dos Santos Pereira, Juan Félix Rodriguez Rebolledo, Gilson de Farias Neves Gitirana, Jr., Maria Tereza da Silva Melo, and Marta Pereira da Luz. 2021. "Development of a Rainfall and Runoff Simulator for Performing Hydrological and Geotechnical Tests" Sustainability 13, no. 6: 3060. https://0-doi-org.brum.beds.ac.uk/10.3390/su13063060