
Short-Term Traffic Speed Forecasting Model for a Parallel Multi-Lane Arterial Road Using GPS-Monitored Data Based on Deep Learning Approach

 ,
,  ,
, 
 ,
,
Abstract
:1. Introduction
- Proposing a solution for dealing with inaccurate and abnormal GPS data on parallel multi-lane arterial roads in Vietnam;
- Designing LSTM network and tuning its hyper-parameters to predict traffic speed on the urban arterial road under historical voyage GPS-monitored data;
- Comparing the proposed method to other standard traffic flow prediction methods. Experiments show that the proposed model outperforms different approaches to traffic speed forecasting.
2. Data and Methods
2.1. Parametric Approaches
2.2. Non-Parametric Approaches
2.3. Deep Learning Approaches
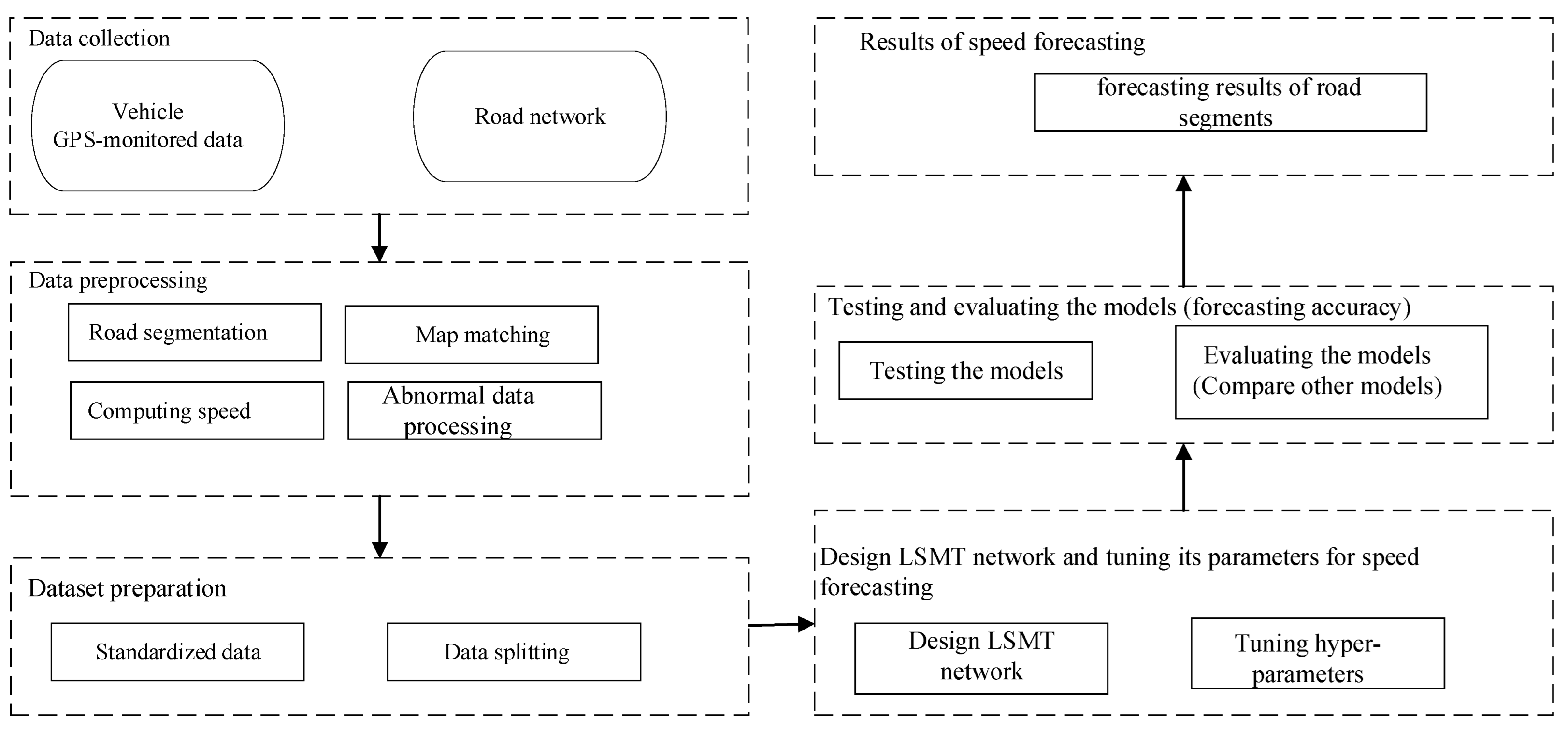
3. Model Description
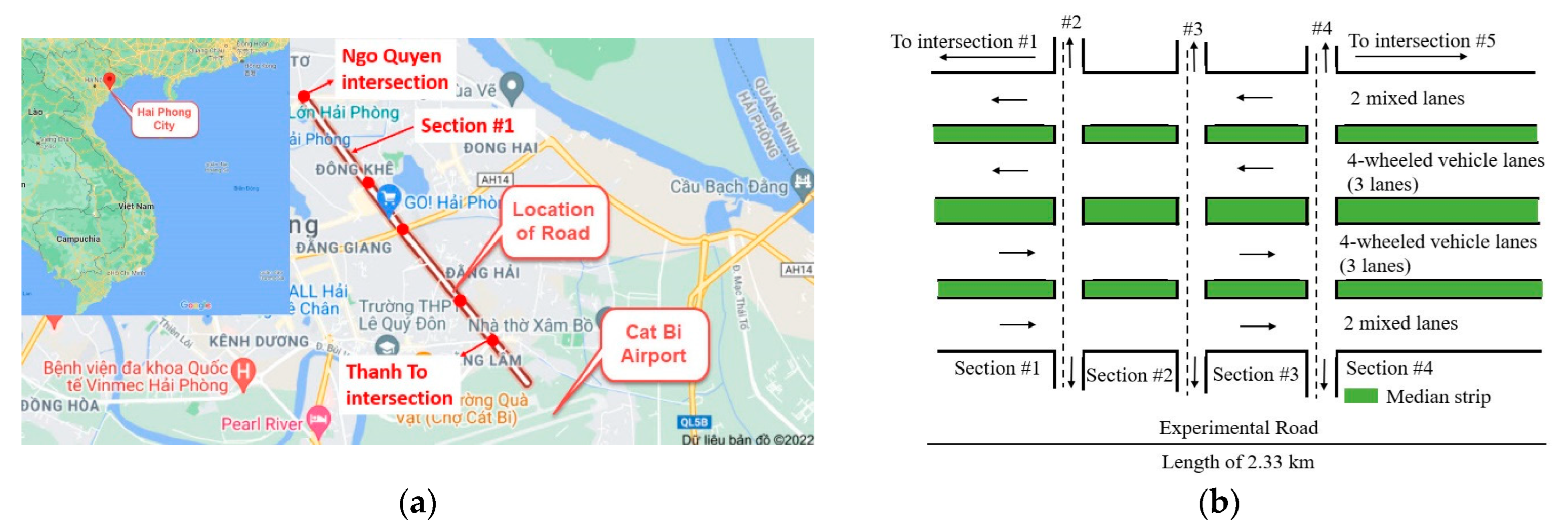
4. Experimental Data Description
4.1. Data Collection
4.2. Data Pre-Processing
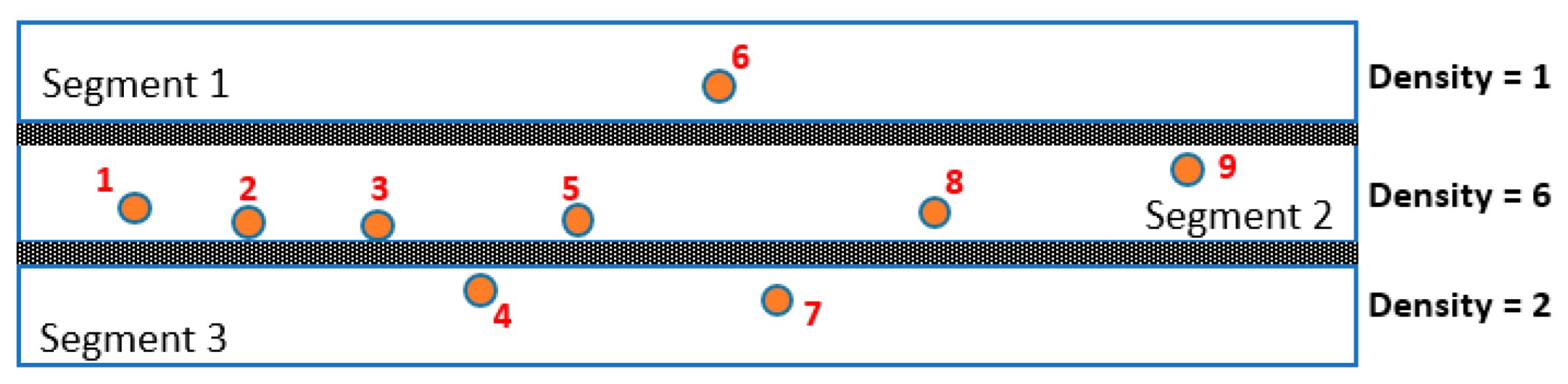
4.2.1. Road Segmentation
4.2.2. Map Matching
- Step 1: Filtering points in the time frame under consideration;
- Step 2: Determining each vehicle’s route (set of points) through the vehicle code;
- Step 3: Removing the outlines for each route.
4.2.3. Computing Speed
4.2.4. Abnormal Data Processing
5. Experimental Results and Discussion
5.1. Designing LSTM Network and Dataset Preparation
5.1.1. Designing LSTM Network
5.1.2. Dataset Preparation
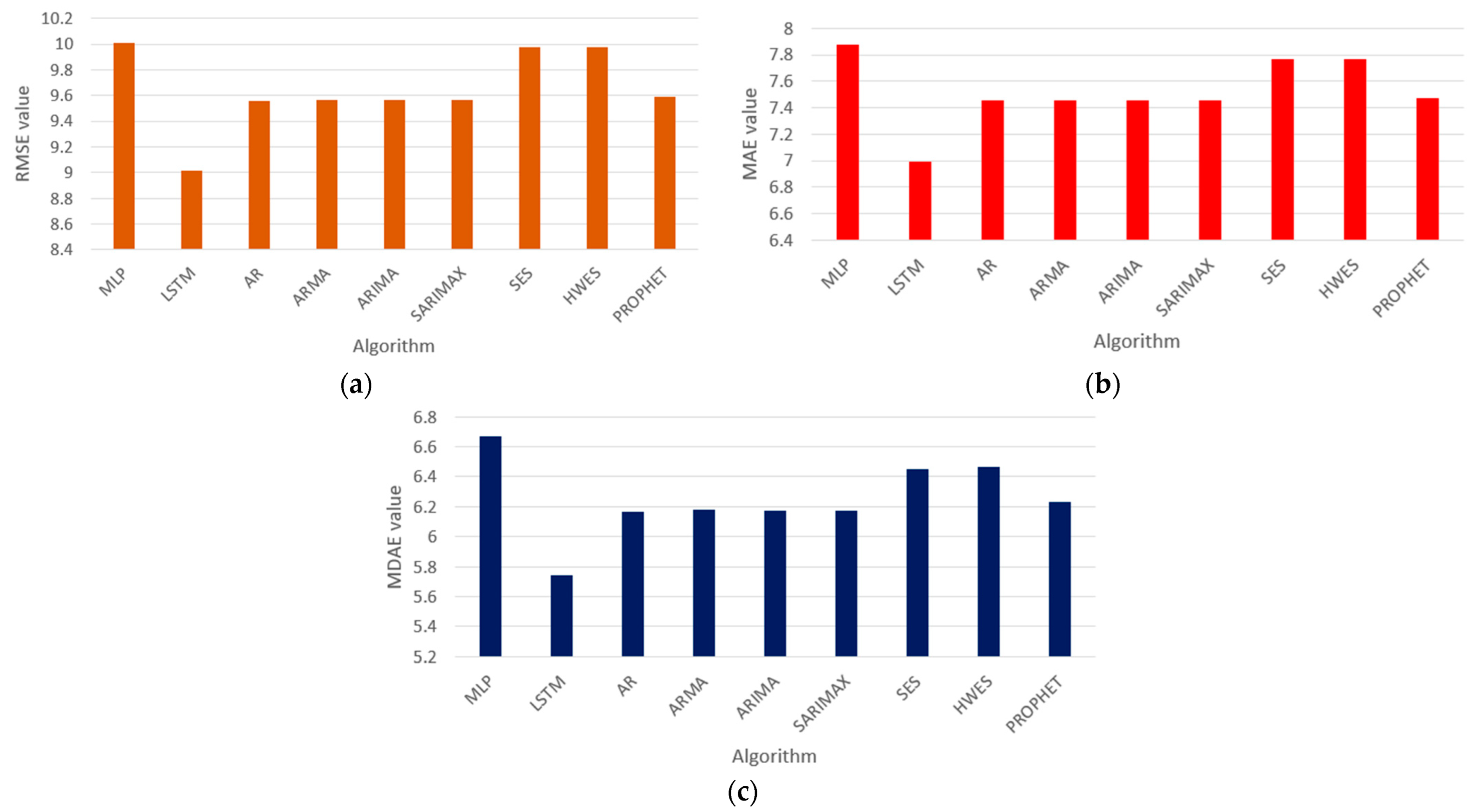
5.1.3. Performance Indicator
5.2. Tuning Hyper-Parameters of LSTM Network
5.2.1. Turning the Window Size
5.2.2. Tuning the Number of Epochs
5.2.3. Tuning the Number of Neurons
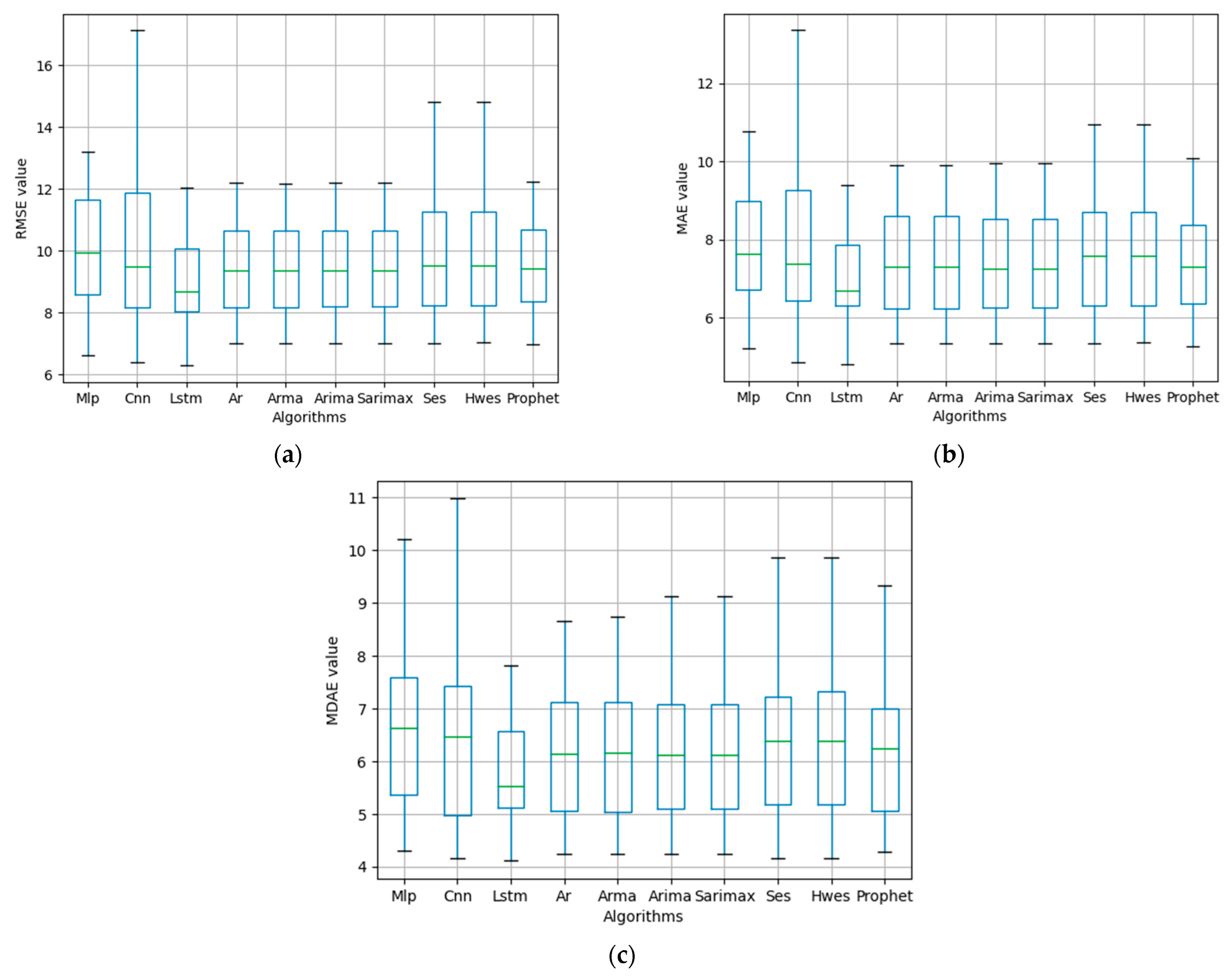
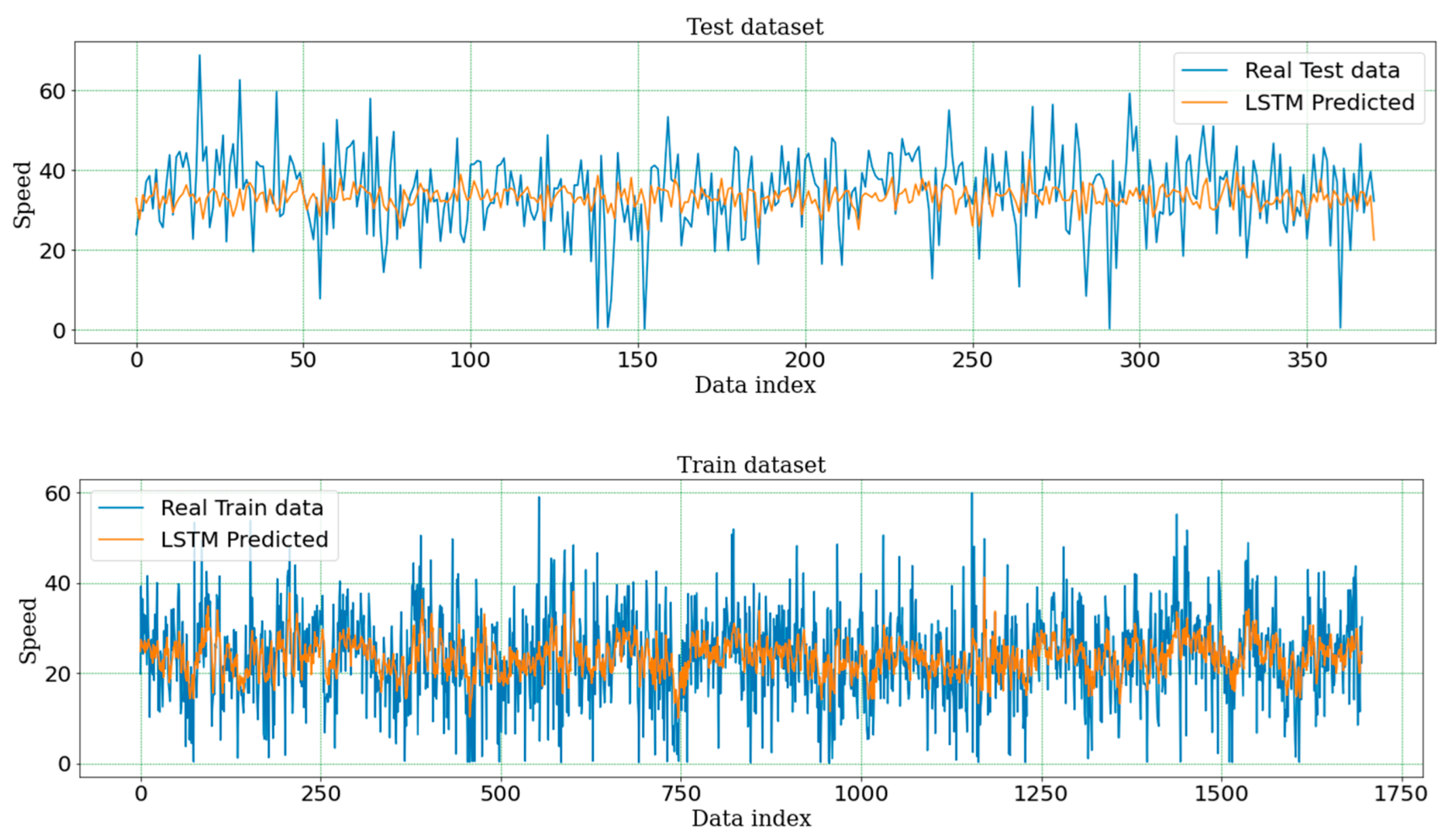
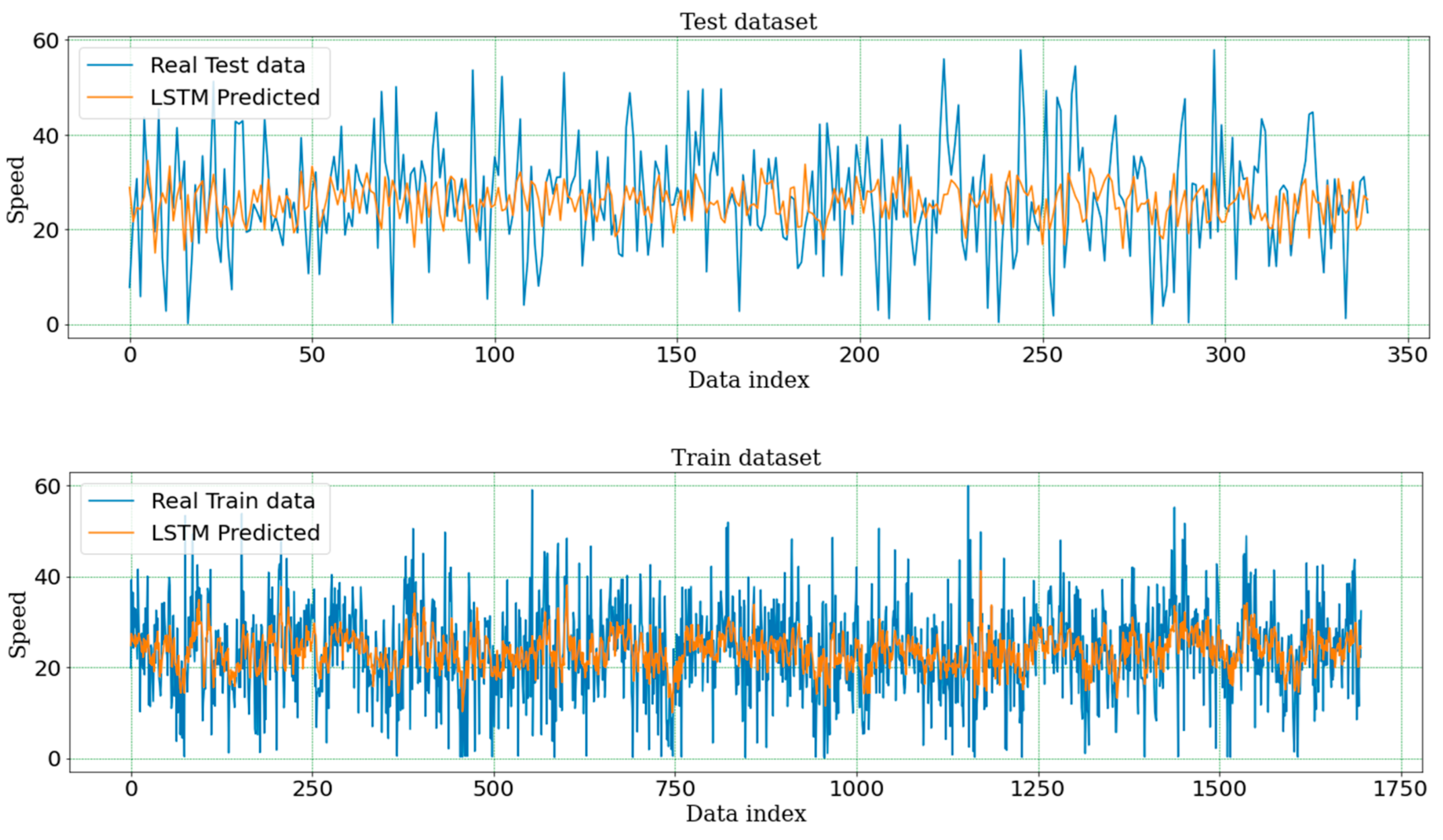
5.3. Forecasting Results and Discussions
6. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wang, X.; Liu, H.; Yu, R.; Deng, B.; Chen, X.; Wu, B. Exploring Operating Speeds on Urban Arterials Using Floating Car Data: Case Study in Shanghai. J. Transp. Eng. 2014, 140, 04014044. [Google Scholar] [CrossRef]
- Song, Z.; Guo, Y.; Wu, Y.; Ma, J. Short-term traffic speed prediction under different data collection time intervals using a SARIMA-SDGM hybrid prediction model. PLoS ONE 2019, 14, e0218626. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Wang, B.; Zhu, Y. Short-Term Traffic Speed Forecasting Based on Attention Convolutional Neural Network for Arterials. Comput. Aided Civ. Infrastruct. Eng. 2018, 33, 999–1016. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Lv, Z.; Xu, J.; Zheng, K.; Yin, H.; Zhao, P.; Zhou, X. LC-RNN: A Deep Learning Model for Traffic Speed Prediction. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018. [Google Scholar] [CrossRef] [Green Version]
- Zhong, S.; Sun, D.J. Analyzing Spatiotemporal Congestion Pattern on Urban Roads Based on Taxi GPS Data. In Logic-Driven Traffic Big Data Analytics; Springer: Singapore, 2022; pp. 97–118. [Google Scholar] [CrossRef]
- Lanka, S.; Jena, S.K. Analysis of GPS Based Vehicle Trajectory Data for Road Traffic Congestion Learning. In Advanced Computing, Networking and Informatics-Volume 2; Springer: Cham, Switzerland, 2014; pp. 11–18. [Google Scholar] [CrossRef]
- Can, V.X.; Rui-Fang, M.; Van Hung, T.; Thuat, V.T. An analysis of urban traffic incident under mixed traffic conditions based on SUMO: A case study of Hanoi. Int. J. Adv. Res. Eng. Technol. 2020, 11, 573–581. [Google Scholar]
- Diependaele, K.; Riguelle, F.; Temmerman, P. Speed Behavior Indicators Based on Floating Car Data: Results of a Pilot Study in Belgium. Transp. Res. Procedia 2016, 14, 2074–2082. [Google Scholar] [CrossRef] [Green Version]
- Sari, R.F.; Rochim, A.F.; Tangkudung, E.; Tan, A.; Marciano, T. Location-Based Mobile Application Software Development: Review of Waze and Other Apps. Adv. Sci. Lett. 2017, 23, 2028–2032. [Google Scholar] [CrossRef]
- Ye, Q.; Szeto, W.; Wong, S.C. Short-Term Traffic Speed Forecasting Based on Data Recorded at Irregular Intervals. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1727–1737. [Google Scholar] [CrossRef] [Green Version]
- Bogaerts, T.; Masegosa, A.D.; Angarita-Zapata, J.S.; Onieva, E.; Hellinckx, P. A graph CNN-LSTM neural network for short and long-term traffic forecasting based on trajectory data. Transp. Res. Part C Emerg. Technol. 2020, 112, 62–77. [Google Scholar] [CrossRef]
- Karlaftis, M.G.; Vlahogianni, E.I. Statistical methods versus neural networks in transportation research: Differences, similarities and some insights. Transp. Res. Part C Emerg. Technol. 2011, 19, 387–399. [Google Scholar] [CrossRef]
- Xiao, F.; Xue, W.; Shen, Y.; Gao, X. A New Attention-Based LSTM for Image Captioning. Neural Process. Lett. 2022, 54, 1–15. [Google Scholar] [CrossRef]
- Malik, S.; Bansal, P.; Sharma, P.; Jain, R.; Vashisht, A. Image Retrieval Using Multilayer Bi-LSTM. In International Conference on Innovative Computing and Communications; Springer: Singapore, 2022. [Google Scholar]
- Zhou, J.; Wang, X.; Yang, C.; Xiong, W. A Novel Soft Sensor Modeling Approach Based on Difference-LSTM for Complex Industrial Process. IEEE Trans. Ind. Inform. 2021, 18, 2955–2964. [Google Scholar] [CrossRef]
- Peng, L.; Wang, L.; Xia, D.; Gao, Q. Effective energy consumption forecasting using empirical wavelet transform and long short-term memory. Energy 2022, 238, 121756. [Google Scholar] [CrossRef]
- Han, S.; Kang, J.; Mao, H.; Hu, Y.; Li, X.; Li, Y.; Xie, D.; Luo, H.; Yao, S.; Wang, Y.; et al. Ese: Efficient speech recognition engine with sparse lstm on fpga. In Proceedings of the 2017 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays, Monterey, CA, USA, 22–24 February 2017. [Google Scholar]
- Bhaskar, S.; Thasleema, T.M. LSTM model for visual speech recognition through facial expressions. Multimed. Tools Appl. 2022, 54, 1–18. [Google Scholar] [CrossRef]
- Ankita; Rani, S.; Bashir, A.K.; Alhudhaif, A.; Koundal, D.; Gunduz, E.S. An efficient CNN-LSTM model for sentiment detection in #BlackLivesMatter. Expert Syst. Appl. 2022, 193, 116256. [Google Scholar] [CrossRef]
- Gu, Z.; Li, Z.; Di, X.; Shi, R. An LSTM-Based Autonomous Driving Model Using a Waymo Open Dataset. Appl. Sci. 2020, 10, 2046. [Google Scholar] [CrossRef] [Green Version]
- Kashyap, A.A.; Raviraj, S.; Devarakonda, A.; Nayak K, S.R.; KV, S.; Bhat, S.J. Traffic flow prediction models—A review of deep learning techniques. Cogent Eng. 2022, 9, 2010510. [Google Scholar] [CrossRef]
- Liu, D.; Tang, L.; Shen, G.; Han, X. Traffic Speed Prediction: An Attention-Based Method. Sensors 2019, 19, 3836. [Google Scholar] [CrossRef] [Green Version]
- Pavlyuk, D. Short-term Traffic Forecasting Using Multivariate Autoregressive Models. Procedia Eng. 2017, 178, 57–66. [Google Scholar] [CrossRef]
- Karlaftis, M.G.; Vlahogianni, E. Memory properties and fractional integration in transportation time-series. Transp. Res. Part C Emerg. Technol. 2009, 17, 444–453. [Google Scholar] [CrossRef]
- Lam, W.H.K.; Tang, Y.F.; Chan, K.S.; Tam, M.-L. Short-term Hourly Traffic Forecasts using Hong Kong Annual Traffic Census. Transportation 2006, 33, 291–310. [Google Scholar] [CrossRef]
- Pan, B.; Demiryurek, U.; Shahabi, C. Utilizing Real-World Transportation Data for Accurate Traffic Prediction. In Proceedings of the 2012 IEEE 12th International Conference on Data Mining, Brussels, Belgium, 10–13 December 2012. [Google Scholar] [CrossRef] [Green Version]
- van der Voort, M.; Dougherty, M.; Watson, S. Combining kohonen maps with arima time series models to forecast traffic flow. Transp. Res. Part C Emerg. Technol. 1996, 4, 307–318. [Google Scholar] [CrossRef] [Green Version]
- Habtemichael, F.G.; Cetin, M. Short-term traffic flow rate forecasting based on identifying similar traffic patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Yao, B.; Chen, C.; Cao, Q.; Jin, L.; Zhang, M.; Zhu, H.; Yu, B. Short-Term Traffic Speed Prediction for an Urban Corridor. Comput. Civ. Infrastruct. Eng. 2017, 32, 154–169. [Google Scholar] [CrossRef]
- Chan, K.Y.; Dillon, T.S.; Singh, J.; Chang, E. Neural-Network-Based Models for Short-Term Traffic Flow Forecasting Using a Hybrid Exponential Smoothing and Levenberg–Marquardt Algorithm. IEEE Trans. Intell. Transp. Syst. 2011, 13, 644–654. [Google Scholar] [CrossRef]
- Chen, H.; Grant-Muller, S. Use of sequential learning for short-term traffic flow forecasting. Transp. Res. Part C Emerg. Technol. 2001, 9, 319–336. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning Traffic as Images: A Deep Convolutional Neural Network for Large-Scale Transportation Network Speed Prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef] [Green Version]
- Koesdwiady, A.; Soua, R.; Karray, F. Improving Traffic Flow Prediction with Weather Information in Connected Cars: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2016, 65, 9508–9517. [Google Scholar] [CrossRef]
- Ma, X.; Tao, Z.; Wang, Y.; Yu, H.; Wang, Y. Long short-term memory neural network for traffic speed prediction using remote microwave sensor data. Transp. Res. Part C Emerg. Technol. 2015, 54, 187–197. [Google Scholar] [CrossRef]
- Wang, J.; Chen, R.; He, Z. Traffic speed prediction for urban transportation network: A path based deep learning approach. Transp. Res. Part C Emerg. Technol. 2019, 100, 372–385. [Google Scholar] [CrossRef]
- Lv, Y.; Duan, Y.; Kang, W.; Li, Z.; Wang, F.-Y. Traffic Flow Prediction with Big Data: A Deep Learning Approach. IEEE Trans. Intell. Transp. Syst. 2014, 16, 865–873. [Google Scholar] [CrossRef]
- Chen, W.; An, J.; Li, R.; Fu, L.; Xie, G.; Alam Bhuiyan, Z.; Li, K. A novel fuzzy deep-learning approach to traffic flow prediction with uncertain spatial–temporal data features. Future Gener. Comput. Syst. 2018, 89, 78–88. [Google Scholar] [CrossRef]
- Zhang, W.; Yu, Y.; Qi, Y.; Shu, F.; Wang, Y. Short-term traffic flow prediction based on spatio-temporal analysis and CNN deep learning. Transp. A Transp. Sci. 2019, 15, 1688–1711. [Google Scholar] [CrossRef]
- Li, Z.; Xiong, G.; Chen, Y.; Lv, Y.; Hu, B.; Zhu, F.; Wang, F.-Y. A Hybrid Deep Learning Approach with GCN and LSTM for Traffic Flow Prediction. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019. [Google Scholar] [CrossRef]
- Vijayalakshmi, B.; Ramar, K.; Jhanjhi, N.; Verma, S.; Kaliappan, M.; Vijayalakshmi, K.; Vimal, S.; Kavita; Ghosh, U. An attention-based deep learning model for traffic flow prediction using spatiotemporal features towards sustainable smart city. Int. J. Commun. Syst. 2020, 34, 4069. [Google Scholar] [CrossRef]
- Lefevre, S.; Sun, C.; Bajcsy, R.; Laugier, C. Comparison of parametric and non-parametric approaches for vehicle speed prediction. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014. [Google Scholar] [CrossRef]
- van Hinsbergen, C.; van Lint, J.; van Zuylen, H. Bayesian committee of neural networks to predict travel times with confidence intervals. Transp. Res. Part C Emerg. Technol. 2009, 17, 498–509. [Google Scholar] [CrossRef]
- Fusco, G.; Colombaroni, C.; Isaenko, N. Short-term speed predictions exploiting big data on large urban road networks. Transp. Res. Part C Emerg. Technol. 2016, 73, 183–201. [Google Scholar] [CrossRef]
- Williams, B.M.; Hoel, L.A. Modeling and forecasting vehicular traffic flow as a seasonal ARIMA process: Theoretical basis and empirical results. J. Transp. Eng. 2003, 129, 664–672. [Google Scholar] [CrossRef] [Green Version]
- Williams, B.M. Multivariate Vehicular Traffic Flow Prediction: Evaluation of ARIMAX Modeling. Transp. Res. Rec. 2001, 1776, 194–200. [Google Scholar] [CrossRef]
- Taylor, S.J.; Letham, B. Forecasting at scale. Am. Stat. 2018, 72, 37–45. [Google Scholar] [CrossRef]
- Haworth, J.; Cheng, T. Non-parametric regression for space–time forecasting under missing data. Comput. Environ. Urban Syst. 2012, 36, 538–550. [Google Scholar] [CrossRef] [Green Version]
- Wu, C.-H.; Ho, J.-M.; Lee, D. Travel-Time Prediction with Support Vector Regression. IEEE Trans. Intell. Transp. Syst. 2004, 5, 276–281. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.-H. An Application of Neural Network on Traffic Speed Prediction under Adverse Weather Conditions; The University of Wisconsin-Madison: Madison, WI, USA, 2003. [Google Scholar]
- Zahid, M.; Chen, Y.; Jamal, A.; Mamadou, C.Z. Freeway Short-Term Travel Speed Prediction Based on Data Collection Time-Horizons: A Fast Forest Quantile Regression Approach. Sustainability 2020, 12, 646. [Google Scholar] [CrossRef] [Green Version]
- Yu, R.; Li, Y.; Shahabi, C.; Demiryurek, U.; Liu, Y. Deep learning: A generic approach for extreme condition traffic forecasting. In Proceedings of the 2017 SIAM International Conference on Data Mining (SDM), Houston, TX, USA, 27–29 April 2017. [Google Scholar]
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the Thirty-First AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017. [Google Scholar]
- Kong, Q.-J.; Zhao, Q.; Wei, C.; Liu, Y. Efficient Traffic State Estimation for Large-Scale Urban Road Networks. IEEE Trans. Intell. Transp. Syst. 2012, 14, 398–407. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Yahmed, Y.B.; Bakar, A.A.; Hamdan, A.R.; Ahmed, A.; Abdullah, S.M.S. Adaptive sliding window algorithm for weather data segmentation. J. Theor. Appl. Inf. Technol. 2015, 80, 322. [Google Scholar]
- Shcherbakov, M.V.; Brebels, A.; Shcherbakova, N.L.; Tyukov, A.P.; Janovsky, T.A.; Kamaev, V.A.E. A survey of forecast error measures. World Appl. Sci. J. 2013, 24, 171–176. [Google Scholar]
- Zhang, H.; Wang, X.; Cao, J.; Tang, M.; Guo, Y. A multivariate short-term traffic flow forecasting method based on wavelet analysis and seasonal time series. Appl. Intell. 2018, 48, 3827–3838. [Google Scholar] [CrossRef]
- Billah, B.; King, M.L.; Snyder, R.; Koehler, A.B. Exponential smoothing model selection for forecasting. Int. J. Forecast. 2006, 22, 239–247. [Google Scholar] [CrossRef] [Green Version]
- Du, S.; Li, T.; Gong, X.; Horng, S.-J. A Hybrid Method for Traffic Flow Forecasting Using Multimodal Deep Learning. Int. J. Comput. Intell. Syst. 2018, 13, 85. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Models | Experimental Data | Experimental Area | Interval | Source |
|---|---|---|---|---|---|
| Parametric Approaches | |||||
| Pavlyuk et al. [24] | ARIMA, VARMA | From 29 May 2016–3 September 2016 (13 weeks) | Minnesota, USA. Considers only one direction (from southeast to northwest) | 5 min | Loop detector |
| Pan et al. [25] | ARIMA, ES, MLP | From 1 November 2011–7 December 2011 | Entire LA county highways and arterial streets | 5 min | Loop detector |
| Voort et al. [26] | Kohonen-ARIMA | July and August 1990 | Beaune, where the flow along three feeder motorways converges onto a single motorway | 30 min | Loop detector |
| Fusco et al. [27] | Seasonal ARIMA | GPS of private vehicles from August to December 2014 | The primary urban road network of the EUR district in the southern area of Rome | 5 min | 100,000 GPS-equipped private vehicles |
| Williams et al. [28] | ARIMAX | From months of July and August from 1984 to 1990. | Four French motorway sites | 30 min | Loop detector |
| Non-Parametric Approaches | |||||
| Filmon et al. [29] | Enhanced K-NN | Multiple datasets were collected from 3 months to 12 months. | Different regions in the United States and United Kingdom | 15 min | |
| Baozhen Yao et al. [30] | SVM | One month of taxi data | Foshan | 30 s | GPS taxi data |
| Kit Yan Chan et al. [31] | Hybrid exponential smoothing method and the Levenberg–Marquardt (LM) algorithm | 12 traffic flow data sets (from weeks 38, 41, and 52 in 2008 and weeks 2, 12, and 27 in 2009) | Reid Highway and Mitchell Freeway intersection, western Australia | 1 min (the 2 h peak traffic period (7:30–9:30 a.m.)) | Two detector stations |
| Muhammad Zahid et al. [32] | Fast forest quantile regression (FFQR) | From around 06:00 a.m. to 12:00 p.m. | A portion of Beijing’s 2nd freeway Ring Road | Different time intervals, including 5, 10, 15 min | Loop detector |
| Deep Learning Approaches | |||||
| Ma et al. [33] | Deep convolutional neural networks (deep CNN) | From 1 May 2015 to 6 June 2015 (37 days) | Two sub-transportation networks of Beijing. | 2 min | Taxicab GPS |
| Arief Koesdwiady et al. [34] | Deep belief networks (DBNs) | Mixed between history weather and traffic data from 1 August 2013 to 25 November 2013. | San Francisco Bay Area of California, 47 freeways. | 30 s (then aggregated into 5 and 15 min. | The inductive-loop sensors |
| Xiaolei Ma et al. [35] | Long short-term neural network (LSTM NN), | From 1 June 2013 to 30 June 2013 | Two separated locations in a major ring road around Beijing | 2 min | Traffic microwave detectors in Beijing |
| Jiawei Wang et al. [36] | CNN-LSTM, bi-directional LSTM | Three months, from 23 January 2018 to 22 April 2018 | Xuancheng, China. A road network consists of 112 road segments | 5 min | Automatic vehicle identification (AVI) detectors |
| Yisheng Lv et al. [37] | Stacked autoencoder | The first three months of the year 2013 | Freeway systems across California. | 30 s (aggregated to 5 min) | 15,000 loop detectors |
| Chen et al. [38] | Combination of the fuzzy method and the deep residual convolution network | The taxicab GPS data | Beijing, China | 48 samples per day | Taxicab GPS |
| Zhang et al. [39] | A combination model of spatial-temporal analysis and CNN algorithm | From all weekdays from 1 January to 31 March 2016 | I-5 Freeway in Seattle, USA | 5 min | Loop detector |
| Li et al. [40] | A graph and attention-based LSTM network | From 1 April 2016 to 31 August 2016 | Caltrans performance measurement system (PeMS) database | 5 min | 100 detector stations |
| Vijayalakshmi et al. [41] | Attention-based CNN-LSTM | Between 1 August 2018 and 30 October 2018 | The location Interstate 405-Northbound | 5 min | Detectors at 37 locations |
| No | Segment Name | Optimal Window Size Value | No | Segment Name | Optimal Window Size Value |
|---|---|---|---|---|---|
| 1 | Segment 1 | 11 | 9 | Segment 9 | 96 |
| 2 | Segment 2 | 42 | 10 | Segment 10 | 35 |
| 3 | Segment 3 | 73 | 11 | Segment 11 | 65 |
| 4 | Segment 4 | 97 | 12 | Segment 12 | 16 |
| 5 | Segment 5 | 46 | 13 | Segment 13 | 94 |
| 6 | Segment 6 | 47 | 14 | Segment 14 | 11 |
| 7 | Segment 7 | 40 | 15 | Segment 15 | 56 |
| 8 | Segment 8 | 47 | 16 | Segment 16 | 97 |
| Metric | Model | Count | Mean | Std. | Min | 25% | Median | 75% | Max |
|---|---|---|---|---|---|---|---|---|---|
| RMSE Test | CNN | 16 | 10.376 | 3.233 | 6.405 | 8.159 | 9.502 | 11.867 | 17.121 |
| LSTM | 16 | 9.012 | 1.652 | 6.286 | 8.052 | 8.7 | 10.062 | 12.048 | |
| MAE Test | CNN | 16 | 8.142 | 2.65 | 4.869 | 6.436 | 7.393 | 9.258 | 13.358 |
| LSTM | 16 | 6.994 | 1.327 | 4.802 | 6.322 | 6.704 | 7.869 | 9.405 | |
| MDAE Test | CNN | 16 | 6.736 | 2.265 | 4.159 | 4.981 | 6.461 | 7.434 | 10.976 |
| LSTM | 16 | 5.745 | 1.172 | 4.114 | 5.12 | 5.523 | 6.564 | 7.814 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, Q.H.; Fang, Y.-M.; Chou, T.-Y.; Hoang, T.-V.; Wang, C.-T.; Vu, V.T.; Ho, T.L.H.; Le, Q.; Chen, M.-H. Short-Term Traffic Speed Forecasting Model for a Parallel Multi-Lane Arterial Road Using GPS-Monitored Data Based on Deep Learning Approach. Sustainability 2022, 14, 6351. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106351
Tran QH, Fang Y-M, Chou T-Y, Hoang T-V, Wang C-T, Vu VT, Ho TLH, Le Q, Chen M-H. Short-Term Traffic Speed Forecasting Model for a Parallel Multi-Lane Arterial Road Using GPS-Monitored Data Based on Deep Learning Approach. Sustainability. 2022; 14(10):6351. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106351
Chicago/Turabian StyleTran, Quang Hoc, Yao-Min Fang, Tien-Yin Chou, Thanh-Van Hoang, Chun-Tse Wang, Van Truong Vu, Thi Lan Huong Ho, Quang Le, and Mei-Hsin Chen. 2022. "Short-Term Traffic Speed Forecasting Model for a Parallel Multi-Lane Arterial Road Using GPS-Monitored Data Based on Deep Learning Approach" Sustainability 14, no. 10: 6351. https://0-doi-org.brum.beds.ac.uk/10.3390/su14106351