Best Proximity Point Results for Generalized Θ-Contractions and Application to Matrix Equations


1
Department of Mathematics and Physics, Hebei University of Architecture, Zhangjiakou 075024, China
2
Department of Mathematics, University of Sargodha, Sargodha 40100, Pakistan
3
Department of Mathematics, King Abdulaziz University, P.O. Box 80203, Jeddah 21589, Saudi Arabia
4
Department of Mathematics, Usak University, Usak 64100, Turkey
*
Author to whom correspondence should be addressed.
Symmetry 2019, 11(1), 93; https://0-doi-org.brum.beds.ac.uk/10.3390/sym11010093
Submission received: 10 December 2018
/
Revised: 5 January 2019
/
Accepted: 7 January 2019
/
Published: 15 January 2019
(This article belongs to the Special Issue Fixed Point Theory and Fractional Calculus with Applications)
{kind=link}
Abstract
:In this paper, we introduce the notion of iri type ---contraction and prove best proximity point results in the context of complete metric spaces. Moreover, we prove some best proximity point results in partially ordered complete metric spaces through our main results. As a consequence, we obtain some fixed point results for such contraction in complete metric and partially ordered complete metric spaces. Examples are given to illustrate the results obtained. Moreover, we present the existence of a positive definite solution of nonlinear matrix equation and give a numerical example.
1. Introduction and Preliminaries
In 1922, Polish mathematician Banach [1] proved an interesting result known as “Banach contraction principle" which led to the foundation of metric fixed point theory. His contribution gave a positive answer to the existence and uniqueness of the solution of problems concerned. Later on, many authors extended and generalized Banach’s result in many directions (see [2,3,4]). Samet et al. [5] introduced the contractive condition called --contraction by
where the functions : satisfy the following conditions:
- (ψ1)
- is nondecreasing;
- (ψ2)
- for all , where is the nth iterate of and for any ;
and that F is -admissible if for all
where : and proved some fixed point results for such mappings in the context of complete metric spaces . Subsequently, Salimi et al. [6] and Hussain et al. [2,7] modified the notions of --contractive, -admissible mappings and proved certain fixed point results. In 2014, Jleli et al. [4] generalized the contractive condition by considering a function : satisfying,
- (Θ1)
- is nondecreasing;
- (Θ2)
- for each sequence if and only if ;
- (Θ3)
- there exist and such that ,
in the following way,
where and and proved the following fixed point theorem.
Theorem 1.
Suppose that F: is a Θ-contraction, where a complete metric space; hen, F possesses a unique such that .
Recently, Ahmad et al. [8] used the following weaker condition instead of the condition :
- () is continuous on .
Many authors generalized (2) in many directions and proved fixed point theorems for single and multivalued contractive mappings (see [8,9,10]).
However, the mapping involved in all these results were self mappings. For non-empty subsets A and B of a complete metric space , the contractive mapping may not have a fixed point. The case lead to the search for an element x (say) such that is minimum, that is, the distance between the points x and is proximity closed. In view of the fact that , an absolute optimal approximate solution is an element x for which the error assumes the least possible value . Thus, a best proximity pair theorem furnishes sufficient conditions for the existence of an optimal approximate solution x, known as a best proximity point of the mapping F, satisfying the condition that . Many authors established the existence and convergence of fixed and best proximity points under certain contractive conditions in different metric spaces (see e.g., [11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29,30] and references therein).
The purpose of this paper is to define the notion of iri type ---contraction and prove some best proximity point results in the frame work of complete metric spaces. Moreover, we prove best proximity point results in partially ordered complete metric spaces through our main results. As an application, we obtain some fixed point results for such contraction in metric and partially ordered metric spaces. Some examples to prove the validity and the existence of solution of nonlinear matrix equation with a numerical example to show the usability of our results is presented.
In the sequel, we denote the set of all functions satisfying () and the set of all functions satisfying ().
Let be a metric space, A and B two nonempty subsets of Define
Definition 1.
Definition 2.
Let be a metric space and two subsets of X, a non-self mapping is called α-proximal admissible if
for all , where [4].
2. Best Proximity Point Results for iri Type Contraction
We begin this section with the following definition:
Definition 3.
Let be two subsets of a metric space and and α: be a function. A mapping F: is said to be iri type ---contraction if for , , there exists and for with and , we have
where
Theorem 2.
Let A and B be two closed subsets of a complete metric space with and let F: be a iri type ---contraction satisfying
- (i)
- F is α-proximal admissible;
- (ii)
- and the pair satisfies the weak P-property;
- (iii)
- F is continuous;
- (iv)
- there exist with such that .
Then, there exists such that .
Proof.
Consider in , since , there exists an element in such that by assumption (iv), . Since and , there exists such that By α-proximal admissibility of F, we have that . Continuing in this way, we get
Now if there exists such that , we have
Then, is the point of best proximity. Therefore, we assume that , i.e., for all .
This together with inequality (5) gives
If
we have
a contradiction, so we have
By induction, we get
Taking limit as in above inequality, we have
and by , we obtain
Now, we show that is a Cauchy sequence in A. Suppose on the contrary that it is not, that is, ∃, we can find the sequences and of natural numbers such that for , we have
Taking limit and using inequality (6), we get
Again by triangle inequality, we have
and
Thus, Equation (8) holds. Then by assumption, , we get
By taking limit as in above inequality, using () and Equation (6), we get
which is a contradiction. Thus, is a Cauchy sequence. Since and A is closed in a complete metric space , we can find such that . Since F is continuous, we have . This implies that .
Since the sequence is a constant sequence with value , we deduce
This completes the proof. □
Example 1.
Let with metric d defined as Suppose and . Then, , and . Define by and by . Clearly, Now, let and such that
Similarly, for all and , we have
that is, the pair has weak P-property. Suppose
then . Hence, for all . Thus, F is α-proximal admissible mapping. Now, we show that F is iri type -- contraction. For ((−4, −4), (20, 0)), define ψ: by and Θ: by .
Now,
and for
we have
Similarly, inequality holds for the remaining cases. Hence, all the assertions of Theorem 2 are satisfied and F has a best proximity point .
Example 2.
Let with metric d defined as Suppose and . Then, and . Define by
and by
Clearly, Now, let and such that
Necessarily, and . In this case,
that is, the pair has weak P-property.
Suppose
then
Thus, . We also have that is , . Thus, . That is, F is an α-proximal admissible mapping. Now, we show that F is iri type -- contraction. For this, define ψ: by and Θ: by . We will verify the following inequality
where The left-hand side of inequality (14) gives
and the right side of inequality (14) is
where
If , then inequality (14) becomes
Thus, , which is true.
Now, if
then
implies
which is also true. Thus, F is iri type -- contraction. Similar argument holds for the rest of the interval. Hence, all the hypotheses of Theorem 2 are verified. Thus F has best proximity point .
Condition of continuity of the mapping in Theorem 2 can be replaced with the following condition to prove the existence of best proximity point of F: : If is a sequence in A such that for all n and as , then there exists a subsequence of { such that for all p.
Theorem 3.
Let A and B be two closed subsets of a complete metric space with and let F: be a iri type ---contraction satisfying
- (i)
- F is α-proximal admissible;
- (ii)
- and the pair satisfies the weak P-property;
- (iii)
- there exists with such that ;
- (iv)
- condition holds.
Then, there exists such that .
Proof.
Following the proof of Theorem 2, there is a Cauchy sequence in A such that . Then, by condition (iv), there exists a subsequence of { such that for all p. Since F is iri type ---contraction, we have by weak P-property and for all p
where
Letting in the above inequality, we get that
Furthermore,
which gives
Taking in inequality (18), we get
Taking limit as in inequality (21), we obtain
which is a contradiction. Hence, . □
For the uniqueness of best proximity point, we use the following condition:
: For all , , where BPP(F) denote the set of best proximity points of F.
Theorem 4.
Adding condition to the hypotheses of Theorem 2 (resp., Theorem 3), one obtains a unique u in A such that .
Proof.
Suppose that u and v are two best proximity points of F with , that is, . Then, by
Since the pair has the weak P-property, from inequality (3), we have
which is a contradiction, so . □
If we take in Theorem 2, we have the following corollary:
Corollary 1.
Let A and B be two closed subsets of a complete metric space with and let F: be a mapping satisfying
- (i)
- ;
- (ii)
- F is continuous α-proximal admissible;
- (iii)
- and the pair satisfies the weak P-property;
- (iv)
- there exist with such that .
Then, there exists such that .
If for all in Theorem 2, we have
Corollary 2.
Let A and B be two closed subsets of a complete metric space with and let F: be a mapping satisfying
- (i)
- ;
- (ii)
- and the pair satisfies the weak P-property;
- (iii)
- F is continuous;
- (iv)
- there exist such that ;
Then, there exists such that .
If in Corollary 2, we have the following corollary:
Corollary 3.
Let A and B be two closed subsets of a complete metric space with and let F: be a mapping satisfying
- (i)
- ;
- (ii)
- and the pair satisfies the weak P-property;
- (iii)
- F is continuous;
- (iv)
- there exist such that ;
Then, there exists such that .
If we take for and in Corollary 3, we obtain the following main results of Jleli et al. [32] and Suzuki [33]:
Corollary 4
([32], Theorem 4.2). Let A and B be two closed subsets of a complete metric space with and let F: be a mapping satisfying
- (i)
- ;
- (ii)
- and the pair satisfies the P-property;
- (iii)
- F is continuous;
- (iv)
- there exist such that ;
Then, there exists such that .
Corollary 5
([33], Theorem 8). Let A and B be two closed subsets of a complete metric space with and let F: be a mapping satisfying
- (i)
- ;
- (ii)
- and the pair satisfies the weak P-property;
- (iii)
- F is continuous;
- (iv)
- there exist such that ;
Then, there exists such that .
3. Best Proximity Point Results on Metric Space Endowed with Partial Order
Let be a partially ordered metric space, A and B be two nonempty subsets of X. Many authors have proved the existence of best proximity point results in the framework of partially ordered metric spaces (see, for example, [12,17,34,35,36,37,38]). In this section, we obtain some new best proximity point results in partially order metric spaces, as an application of our results.
Definition 4.
A mapping F: is said to be proximally order-preserving if and only if it satisfies the condition
for all .
Definition 5.
Let be a partially ordered set. A sequence is said to be nondecreasing with respect to ⪯ if for all n.
Theorem 5.
Let A and B be two closed subsets of a complete partially ordered metric space with and let F: be a given non-self mapping such that
where
for all with , , and . Suppose that
- (i)
- and the pair satisfies the weak P-property;
- (ii)
- F is continuous;
- (iii)
- there exists with satisfies .
Then, there exists such that .
Proof.
Define by
Now, we prove that F is a α-proximal admissible mapping. For this, assume
so
Now, since F is proximally order-preserving, . Thus, . Furthermore, by assumption that the comparable elements and in with satisfies Finally, for all comparable , we have and hence by (24), we have
That is, F is iri type ---contraction. Hence, all the conditions of Theorem 2 are satisfied. Thus, F has a best proximity point. □
: If is a non-decreasing sequence in A such that as , then there exists a subsequence of { such that .
Theorem 6.
Let A and B be two closed subsets of a partially ordered complete metric space with and let F: be a non self mapping such that
where
for all comparable , where , and . Suppose that
- (i)
- and the pair satisfies the weak P-property;
- (ii)
- there exist with satisfied ;
- (iii)
- condition holds.
Then, there exists such that .
Proof.
Following the definition of as in the proof of Theorem 5, one can easily observe that F is an α-proximal admissible mapping and iri type -- contraction. Suppose that for all such that as , then for all . Hence, by property , we have a subsequence of such that for all and so for all . Thus, all the conditions of Theorem 3 are satisfied and F has a best proximity point: □
: For all , .
Theorem 7.
Adding condition to the hypotheses if Theorem 5 (resp., Theorem 6), one obtains a unique u in A such that .
Proof.
Define as in Theorem 5, we observe that F is an α-proximal admissible mapping and iri type -- contraction. For uniqueness, suppose that u and v are two best proximity points of F with , that is, . Then, by , , which implies by the definition of α that . Thus, by Theorem 4, we have the uniqueness of the best proximity point. □
If we take in Theorem 5, then we have following corollary:
Corollary 6.
Let A and B be two closed subsets of a partially ordered complete metric space with and let F: be a given non-self mapping such that
for all comparable , where , and . Suppose that
- (i)
- and the pair satisfies the weak P-property;
- (ii)
- F is continuous;
- (iii)
- there exists with satisfies .
Then, there exists such that .
4. Fixed Point Results for iri Type ---Contraction
As an application of results proven in above sections, we deduce new fixed point results for iri type ---contraction in the frame work of metric and partially ordered metric spaces.
If we take in Theorems 2 and 3, we obtain the following fixed point results:
Theorem 8.
Let be a complete metric space and let F: be a self mapping satisfying
where
for all , where , and . Suppose that
- (i)
- F is α-admissible;
- (ii)
- F is continuous;
- (iii)
- there exists such that .
Then, F has a fixed point.
Theorem 9.
Let be a complete metric space and let F: be a self mapping satisfying
where
for all , where , and . Suppose that
- (i)
- F is α-admissible;
- (ii)
- there exists such that .
- (iii)
- condition is satisfied.
Then, T has a fixed point.
: For all , .
Theorem 10.
Adding condition to the hypotheses of Theorem 8 (res., Theorem 9), we obtain a unique x in X such that .
By taking and using for , in Theorem 8, we obtain the following result presented in [4]:
Corollary 7
([4], Corollary 2.1). Let be a complete metric space and F: be a given map. Suppose that there exist and such that
for all . Then, F has a unique fixed point.
If we take in Theorems 5 and 6, we obtain the following fixed point results for complete partially ordered metric spaces:
Theorem 11.
Let be a partially ordered complete metric space and let F: be a non decreasing self mapping satisfying
where
for all comparable where , and . Suppose that
- (i)
- F is continuous,
- (ii)
- there exists such that
Then, F has a fixed point.
Theorem 12.
Let be a partially ordered complete metric space and let F: be a non decreasing self mapping satisfying
where
for all comparable , where , and . Suppose that
- (i)
- there exists such that
- (ii)
- condition is satisfied.
Then, F has a fixed point.
: For all , .
Theorem 13.
Adding condition to the hypotheses of Theorem 11 (res., Theorem 12), we obtain a unique x in X such that .
If we take for , and in Theorem 11, we obtain the following main results of Nieto et al. [39]:
Corollary 8
([39], Theorem 2.1). Let be a partially ordered complete metric space and let F: be a non decreasing self mapping satisfying
for all comparable and . Suppose that
- (i)
- F is continuous;
- (ii)
- there exists such that
Then, F has a fixed point.
Removing the condition of continuity of the mapping F in Corollary 8 and using an extra condition on X, we have the following corollary:
Corollary 9
([39], Theorem 2.2). Let be a partially ordered complete metric space and let F: be a non decreasing self mapping satisfying
for all comparable and . Suppose that
- (i)
- if a nondcreasing sequence in X, then , for all n;
- (ii)
- there exists such that
Then, F has a fixed point.
5. Applications to Nonlinear Matrix Equations
In this section, an illustration of Theorem 13 to guarantee the existence of a positive definite solution of nonlinear matrix equations is given. We shall use the following notations: Let be the set of all complex matrices, be the class of all Hermitian matrices, be the set of all Hermitian positive definite matrices, be the set of all positive semidefinite matrices. Instead of we will write . Furthermore, means . In addition, we will use instead of . Furthermore, for every there is a greatest lower bound and a least upper bound. The symbol denotes the spectral norm of the matrix A, that is, such that is the largest eigenvalue of , where is the conjugate transpose of A. We denote by the Ky Fan norm defined by , where are the singular values of and for (Hermitian) nonnegative matrices. For a given we denote the modified norm by . The set equipped with the metric induced by is a complete metric space for any positive definite matrix Q. Moreover, is a partially ordered set with partial order ⪯ where .
In this section, denote . We consider the following class of nonlinear matrix equation:
where , are arbitrary matrices and a continuous mapping which maps into . Assume that is an order-preserving ( is order preserving if with implies that ) mapping.
Lemma 1
([40]). Let and be matrices. Then, .
Now, we prove the following result:
Theorem 14.
Let : be an order-preserving continuous mapping which maps into and and . Assume that
- (a)
- ;
- (b)
Proof.
Define : by
and , . Then, a fixed point of is a solution of (26). Let with , then . Thus, for , we have
The inequality follows from Lemma 1. From condition (a) and (b), we have that
and . This implies
Thus, using Theorem 13, we conclude that has a unique fixed point and hence the matrix Equation (26) has a unique solution in . □
Example 3.
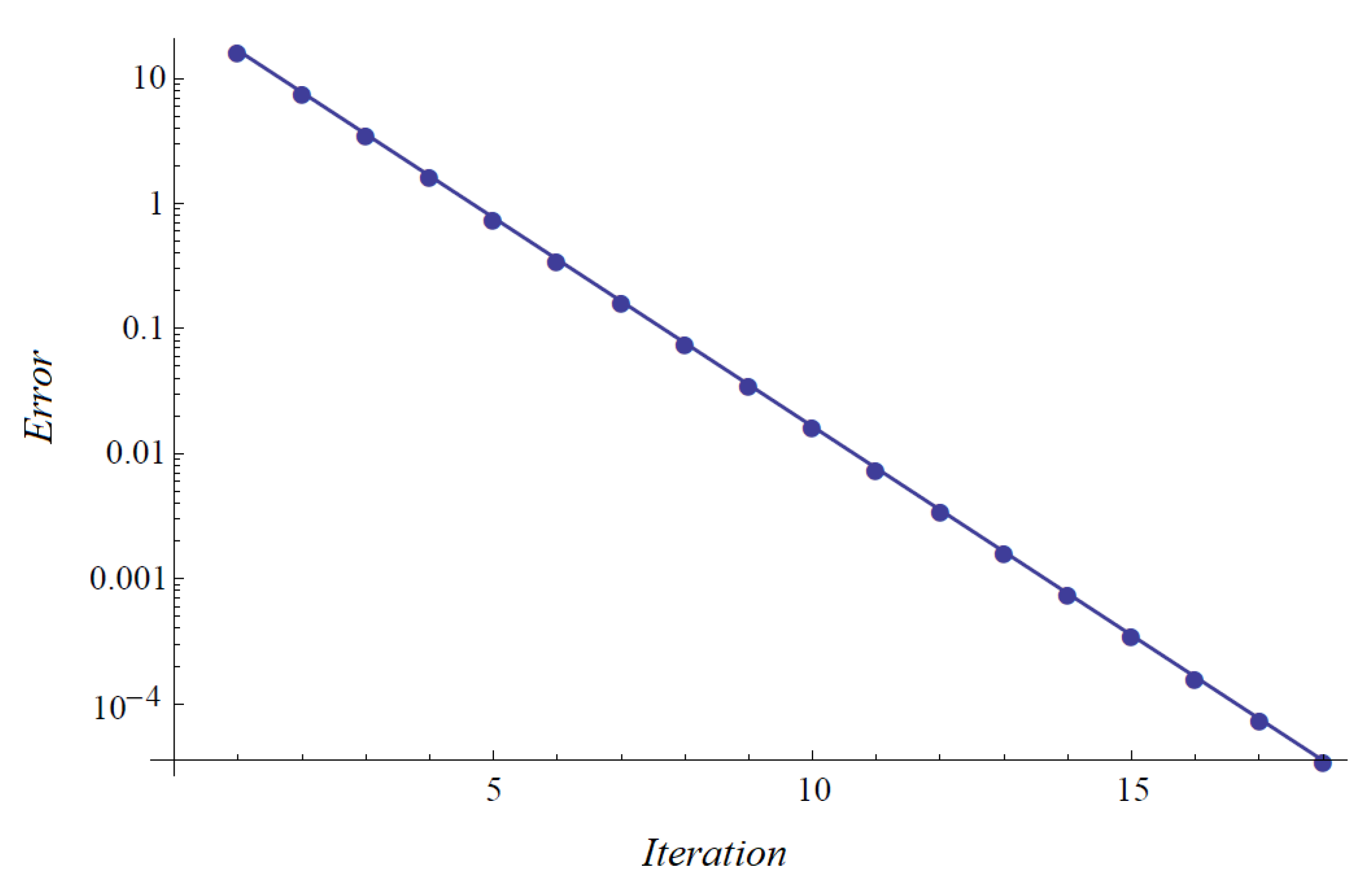
Consider the matrix equation
where and are given by
Define and . Then, conditions (a) and (b) of Theorem 14 are satisfied for . By using the iterative sequence,
with
6. Conclusions
This paper is concerned with the existence and uniqueness of the best proximity point results for iri type contractive conditions via auxiliary functions and in the framework of complete metric spaces and complete partially ordered metric spaces. In addition, as a consequence, some fixed point results as a special case of our best proximity point results of the relevant contractive conditions in such spaces are studied. To illustrate the existence results, some examples are constructed. Finally, as an application of our fixed point result for partially ordered metric space, the existence of positive definite solution for nonlinear matrix equation is investigated and a numerical example is presented. Our results generalized the results of Jleli et al. [4,32], Suzuki [33] and Nieto et al. [39].
Author Contributions
These authors contributed equally to this work.
Funding
This paper was funded by the scientific research foundation of Education Bureau of Hebei Province (Grant No. QN2016191) and Doctoral Fund of Hebei University of Architecture, China (Grant No. B201801).
Acknowledgments
The authors would like to thank the anonymous reviewers for their valuable comments. Second and third author would like to thanks UOS for the project No. UOS/ORIC/2016/54.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Banach, S. Sur les opérations dans les ensembles abstraits et leur application aux-equations intégrales. Fundam. Math. 1922, 3, 133–181. [Google Scholar] [CrossRef]
- Hussain, N.; Kutbi, M.A.; Salimi, P. Fixed point theory in α-complete metric spaces with applications. Abstr. Appl. Anal. 2014, 2014, 280817. [Google Scholar] [CrossRef]
- Hussain, N.; Parvaneh, V.; Samet, B.; Vetro, C. Some fixed point theorems for generalized contractive mappings in complete metric spaces. Fixed Point Theory Appl. 2015, 2015, 185. [Google Scholar] [CrossRef]
- Jleli, M.; Samet, B. A new generalization of the Banach contraction principle. J. Inequal. Appl. 2014, 2014, 38. [Google Scholar] [CrossRef] [Green Version]
- Samet, B.; Vetro, C.; Vetro, P. Fixed point theorem for α-ψ-contractive type mappings. Nonlinear Anal. 2012, 75, 2154–2165. [Google Scholar] [CrossRef]
- Salimi, P.; Latif, A.; Hussain, N. Modified α-ψ-contractive mappings with applications. Fixed Point Theory Appl. 2013, 2013, 151. [Google Scholar] [CrossRef]
- Hussain, N.; Kutbi, M.A.; Khaleghizadeh, S.; Salimi, P. Discussions on recent results for α-ψ-contractive mappings. Abstr. Appl. Anal. 2014, 2014, 456482. [Google Scholar] [CrossRef]
- Ahmad, J.; Al-Mazrooei, A.E.; Cho, Y.J.; Yang, Y.O. Fixed point results for generalized Θ-contractions. J. Nonlinear Sci. Appl. 2017, 10, 2350–2358. [Google Scholar] [CrossRef]
- Liu, X.D.; Chang, S.; Xiao, Y.; Zhao, L.C. Existence of fixed points for Θ-type contraction and Θ-type Suzuki contraction in complete metric spaces. Fixed Point The. Appl. 2016, 2016, 8. [Google Scholar] [CrossRef]
- Parvaneh, V.; Golkarmanesh, F.; Hussain, N.; Salimi, P. New fixed point theorems for α-HΘ-contractions in ordered metric spaces. J. Fixed Point Theory Appl. 2016, 18, 905–925. [Google Scholar] [CrossRef]
- Abbas, M.; Hussain, A.; Kumam, P. A coincidence best proximity point problem in G-metric spaces. Abstr. Appl. Anal. 2015, 2015, 243753. [Google Scholar] [CrossRef]
- Abkar, A.; Gabeleh, M. Best proximity points for cyclic mappings in ordered metric spaces. J. Optim. Theory Appl. 2011, 150, 188–193. [Google Scholar] [CrossRef]
- Abkar, A.; Gabeleh, M. The existence of best proximity points for multivalued non-self-mappings. Rev. Acad. Cienc. Exactas Fis. Nat. Ser. A Math. 2013, 107, 319–325. [Google Scholar] [CrossRef]
- Ali, M.U.; Kamran, T.; Shahzad, N. Best proximity point for α-ψ-proximal contractive multimaps. Abstr. Appl. Anal. 2014, 2014, 181598. [Google Scholar] [CrossRef]
- Amini-Harandi, A. Best proximity points for proximal generalized contractions in metric spaces. Optim. Lett. 2013, 7, 913–921. [Google Scholar] [CrossRef]
- Amini-Harandi, A.; Fakhar, M.; Hajisharifi, H.R.; Hussain, N. Some new results on fixed and best proximity points in preordered metric spaces. Fixed Point Theory Appl. 2013, 2013, 263. [Google Scholar] [CrossRef] [Green Version]
- Basha, S.S. Discrete optimization in partially ordered sets. J. Glob. Optim. 2012, 54, 511–517. [Google Scholar] [CrossRef]
- Choudhurya, B.S.; Maitya, P.; Metiya, N. Best proximity point results in set-valued analysis. Nonlinear Anal. Model. Control 2016, 21, 293–305. [Google Scholar]
- Eldred, A.; Veeramani, P. Existence and convergence of best proximity points. J. Math. Anal. Appl. 2006, 323, 1001–1006. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Adeel, M.; Kanwal, T.; Sultana, N. Set Valued Contraction of Suzuki-Edelstein-Wardowski Type and Best Proximity Point Results. Bull. Math. Anal. Appl. 2018, 10, 53–67. [Google Scholar]
- Hussain, N.; Latif, A.; Salimi, P. Best proximity point results for modified Suzuki α-ψ-proximal contractions. Fixed Point Theory Appl. 2014, 2014, 10. [Google Scholar]
- Hussain, N.; Kutbi, M.A.; Salimi, P. Best proximity point results for modified α-ψ-proximal rational contractions. Abstr. Appl. Anal. 2013, 2013, 927457. [Google Scholar]
- Khan, A.R.; Shukri, S.A. Best proximity points in the Hilbert ball. J. Nonlinear Convex Anal. 2016, 17, 1083–1094. [Google Scholar]
- Karapinar, E. Best proximity points of cyclic mappings. Appl. Math. Lett. 2007, 335, 79–92. [Google Scholar]
- Komal, S.; Sultana, N.; Hussain, A.; Kumam, P. Optimal Approximate Solution for Generalized Contraction Mappings. Commun. Math. Appl. 2016, 7, 23–36. [Google Scholar]
- Latif, A.; Abbas, M.; Husain, A. Coincidence best proximity point of Fg-weak contractive mappings in partially ordered metric spaces. J. Nonlinear Sci. Appl. 2016, 9, 2448–2457. [Google Scholar]
- Latif, A.; Hezarjaribi, M.; Salimi, P.; Hussain, N. Best proximity point theorems for α-ψ-proximal contractions in intuitionistic fuzzy metric spaces. J. Inequal. Appl. 2014, 2014, 352. [Google Scholar]
- Lo’lo, P.; Vaezpour, S.M.; Esmaily, J. Common best proximity points theorem for four mappings in metric-type spaces. Fixed Point Theory Appl. 2015, 2015, 47. [Google Scholar]
- Ma, Z.; Jiang, L.; Sun, H. C*-algebra-valued metric spaces and related fixed point theorems. Fixed Point Theory Appl. 2014, 2014, 206. [Google Scholar]
- Ma, Z.; Jiang, L. C*-algebra-valued b-metric spaces and related fixed point theorems. Fixed Point Theory Appl. 2015, 2015, 111. [Google Scholar]
- Zhang, J.; Su, Y.; Cheng, Q. A note on—A best proximity point theorem for Geraghty-contractions. Fixed Point Theory Appl. 2013, 2013, 99. [Google Scholar]
- Jleli, M.; Samet, B. Best proximity points for α-ψ-proximal contractive type mappings and applications. Bull. Sci. Math. 2013, 137, 977–995. [Google Scholar]
- Suzuki, T. The existence of best proximity points with the weak P-property. Fixed Point Theory Appl. 2013, 2013, 259. [Google Scholar] [Green Version]
- Abkar, A.; Gabeleh, M. Generalized cyclic contractions in partially ordered metric spaces. Optim. Lett. 2012, 6, 1819–1830. [Google Scholar]
- Basha, S.S. Best proximity point theorems on partially ordered sets. Optim. Lett. 2013, 7, 1035–1043. [Google Scholar]
- Pragadeeswarar, V.; Maruda, M. Best proximity points: Approximation and optimization in partially ordered metric spaces. Optim. Lett. 2013, 7, 1883–1892. [Google Scholar]
- Pragadeeswarar, V.; Marudai, M. Best proximity points for generalized proximal weak contractions in partially ordered metric spaces. Optim. Lett. 2015, 9, 105–118. [Google Scholar]
- Pragadeeswarar, V.; Marudai, M.; Kumam, P. Best proximity point theorems for multivalued mappings on partially ordered metric spaces. J. Nonlinear Sci. Appl. 2016, 9, 1911–1921. [Google Scholar] [Green Version]
- Nieto, J.T.; Rodríguez-López, R. Contractive Mapping Theorems in Partially Ordered Sets and Applications to Ordinary Differential Equations. Order 2005, 22, 223–239. [Google Scholar]
- Ran, A.C.M.; Reurings, M.C.B. A fixed point theorem in partially ordered sets and some applications to matrix equations. Proc. Am. Math. Soc. 2003, 132, 1435–1443. [Google Scholar]
Figure 1.
Convergence history for (29).
Figure 1.
Convergence history for (29).

© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Ma, Z.; Hussain, A.; Adeel, M.; Hussain, N.; Savas, E. Best Proximity Point Results for Generalized Θ-Contractions and Application to Matrix Equations. Symmetry 2019, 11, 93. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11010093
AMA Style
Ma Z, Hussain A, Adeel M, Hussain N, Savas E. Best Proximity Point Results for Generalized Θ-Contractions and Application to Matrix Equations. Symmetry. 2019; 11(1):93. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11010093
Chicago/Turabian StyleMa, Zhenhua, Azhar Hussain, Muhammad Adeel, Nawab Hussain, and Ekrem Savas. 2019. "Best Proximity Point Results for Generalized Θ-Contractions and Application to Matrix Equations" Symmetry 11, no. 1: 93. https://0-doi-org.brum.beds.ac.uk/10.3390/sym11010093
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.