1. Introduction
The fixed point theory is derived from the investigation of the solution for certain types of differential equations using the successive approximation method. Indeed, the renowned fixed point theorems of Banach [
1] are a reformulation of the successive approximation method that was used by some famous mathematicians, namely Cauchy, Liouville, Picard, Lipschitz, Peano, etc. This fact also indicates that the advances and progress in fixed point theory can be referred back to differential equations and the integral equations. On the other hand, in recent years, fixed point theory has been used very extensively to find solutions of nonlinear fractional differential equations.
Indeed, in the last few decades, fractional calculus and fractional differential and integral equations have been the most interesting research topics, not only in mathematics, but also in physics. We can find a brief historical introduction to fractional derivatives with basic notations, illustrations, and results in [
2,
3,
4]. Since the beginning, it has been known that the theory has wide applications not only in nonlinear analysis and computational mathematics, but also in applied sciences, including computer science and economics. The applications of these fixed point theories have been presented in the last century, due to this strong relation of fixed point theory and the applications used in several disciplines.
The authors in [
5] proposed the notion of
-contraction as a generalization of a standard contraction, given by Banach, and proved fixed point theorems in the context of Bianciari distance space. We, first, recall the notion of
-contraction, which is based on the following class of auxiliary functions:
where:
- ()
is non-decreasing;
- ()
for each sequence ;
- ()
there exist and such that
- ()
is continuous.
This notion has been used by many authors to provide fixed point results; see, e.g., [
6,
7,
8,
9,
10,
11,
12,
13,
14].
On the other hand, we recall the notion of extended
b-metric space (simply,
-metric space), introduced by Kamran et al. [
15], which is the most general form of the concept of the metric. For the sake of completeness, we recollect the definition as follows:
Definition 1 ([
15])
. For a non-empty set S and a mapping , we say that a function is called an extended b-metric (in short, -metric) if it satisfies:- (i)
if and only if ;
- (ii)
;
- (iii)
for all The symbols denote -metric space.
Remark 1. It is clear that in the case of , for , the extended b-metric becomes the standard b-metric. As is known well, the b-metric does not need to be continuous. As a result, the extended b-metric is not necessarily continuous either. In this paper, it is presumed that the extended b-metric is continuous.
Example 1. Let , , and be equipped with the metric:where:and: It is obvious that forms an extended b-metric with: Example 2. Let , , and . Define as: Clearly, (i) and (ii) hold. For (iii), we shall consider the following cases:
- Case 1.
Let for ; we have: - Case 2.
For and let : - Case 3.
For and ,
clearly one can check that .
Similarly, for and , the triangle inequality holds.
Hence, for any .
Definition 2 ([15]).Let S be a non-empty set endowed with the extended b-metric , and a sequence in S is said to: - (a)
converge to x if for any given , there exists such that for all In brief, we write
- (b)
be fundamental (Cauchy) if for every , there exists such that for all
Furthermore, this study defines the completeness of -metric space as follows:
(c) If any fundamental (Cauchy) sequence in S is convergent, then we say that is complete.
For more interesting examples and basic results in
-metric space, we refer to [
16,
17,
18,
19,
20]. For some recent modifications or developments to extended
metric spaces, the reader may refer to the so-called controlled and double-controlled metric type spaces in [
21,
22] and for further fixed point investigations in extended
b-metric spaces to [
23].
With reference to the above facts, the proposed three new concepts are
-contraction, a Hardy–Rogers-type
-contraction, and an interpolative
-contraction in
-metric space, and we prove pertinent fixed point theorems in
Section 2. By using the obtained results in
Section 2, we propose the solutions of the nonlinear integral equation and fractional differential equation via the fixed point approach, which are presented in
Section 3 and
Section 4. The effectiveness of this approach is illustrated by a numerical experiment in
Section 5.
2. Main Results
Now, we start this section by introducing the concept of -contraction.
Definition 3. A self-mapping T, on an extended b-metric space , is named a
-contraction
if there exists a function such that:where such that here, for . Theorem 1. If a self-mapping T, on a completed extended b-metric space , forms a -contraction, then T has a unique fixed point in S.
Proof. For an arbitrary point
, we construct an iterative sequence
as follows:
Suppose, if for some , then will be a fixed point of T.
Therefore, without loss of generality, we can assume that
for all
. From Definition 3, we have:
Recursively, we find that:
Accordingly, we obtain that:
Letting
in (
1), we get
as
.
From
, there exist
and
such that:
We presume
and
. On account of the limit definition, there exists
such that:
for all
.
It yields that for all .
Assume and (an arbitrary positive number). From the definition of the limit, there exists
such that for all .
Subsequently, in all cases, there exist
and
such that:
Using Equation (
1), we obtain:
As
in the inequality above, we find:
Thus, there exists
such that:
Let
Due to the modified triangle inequality, we derive that:
Since
we have:
which is convergent as
and
.
Thus, the sequence in S is a Cauchy sequence. Since is a complete -metric space, there exists a point in S such that converges to .
One can easily note that
T is continuous. Suppose that
. Taking the expression (
3) into account, we have:
Regarding , it implies that, for all distinct .
From this evaluation, we can get, for all .
As in the inequality above, we derive . By the uniqueness of the limit,
Suppose f has another fixed point such that . Then, clearly, .
Now, using the condition (
3), we get,
Therefore, . This claims that T has a unique fixed point in S. □
Example 3. Let . Define as:and as . Then, is a complete extended b-metric space. Define as , so that , where .
Note that for each .
We have
Now, define as .
Then, all the conditions of Theorem 1 are satisfied so that the mapping has a unique fixed point “0” in S.
If we take in the above theorem, then we get the below corollary.
Corollary 1. Let T be a self-mapping on a complete b-metric space . If there exist and such that:then T has a unique fixed point in S. If we take in the above theorem, then we get the below corollary.
Corollary 2. Let T be a self-mapping on a complete metric space . If there exist and such that:then T has a unique fixed point in S. In what follows, we define the second notion, HR--contraction, as follows:
Definition 4. A self-mapping f, on an extended b-metric space , is called a Hardy–Rogers-type Θ-contraction (HR-Θ-contraction), if there exists a function and non-negative real number such that:for all , where:
where
here,
for
and
Theorem 2. If a self-mapping T, on a completed extended b-metric space forms an HR-Θ-contraction, then T has a unique fixed point in S.
Proof. As in Theorem 1, we construct an iterative sequence
by starting at an arbitrary point
as follows:
Without loss of generality, we suppose that for all . Indeed, if for some , then will be a fixed point of T.
We prove that .
Employing the contraction condition (
5), we get,
where:
If
, then the inequality (
6) becomes:
which is a contradiction (since
). Thus, we have
. It is yielded from (
6) that:
Iteratively, we find that:
After this observation, by following the related lines in the proof of Theorem 2, we conclude that the sequence in S is a Cauchy sequence. Regarding that is a complete -metric space, there exists a point in S such that converges to .
Without lose of generality, we may assume that
for all
n (or, for large enough
n.) Assume that
Employing (
5), we get:
for all
, where:
By taking
in the inequality above, we derive that:
a contradiction. Hence,
That is, f has a fixed point in S.
Suppose f has another fixed point such that .
Then, clearly, .
Now, using the condition (
7), we get,
a contradiction. Accordingly, we have
.
Thus, f has a unique fixed point in S. □
Definition 5. Let be a -metric space and be a mapping. Then, f is said to be an interpolative-Θ
-contraction if there exists a function and non-negative real numbers with such that:for all . Where here, for and
Theorem 3. Let be a complete -metric space such that is a continuous functional and be an interpolative-Θ-contraction. Then, f has a unique fixed point in S.
Thus, it is sufficient to choose in Theorem 2 to conclude the theorem above.
In Theorem 3, if we take , then the above theorem reduces to as below.
Corollary 3. labelJS1-c-4 Let be an extended b-metric space and . If a mapping satisfies that
there exists such that:where and , then f has a unique fixed point in S. In Theorem 3, if we take , then the above theorem reduces to as below.
Corollary 4. labelJS1-c-4 Let be an extended b-metric space such that is a continuous functional, , and be a mapping. Suppose that there exists such that:and such that . Then, f has a unique fixed point in S. 5. Numerical Example
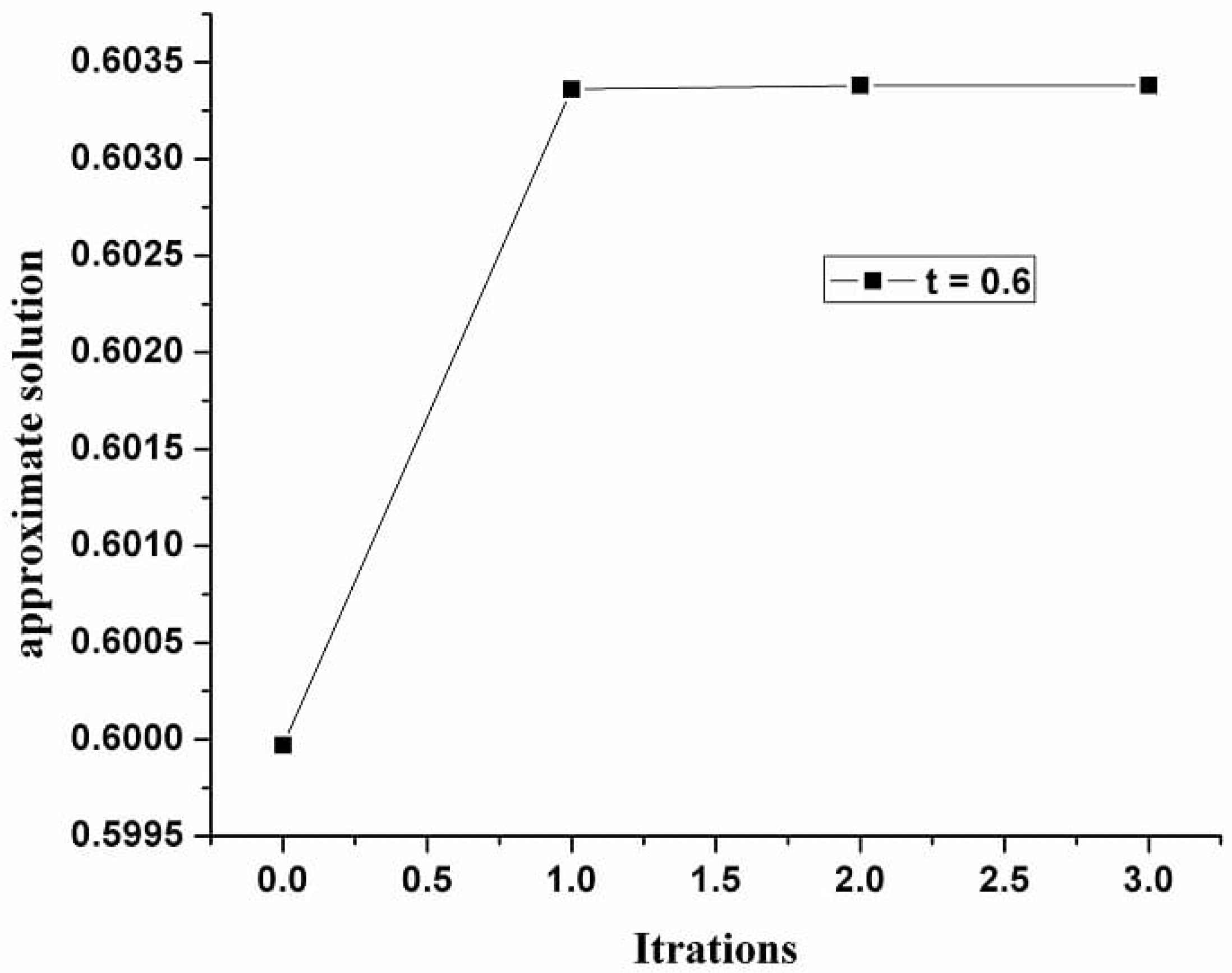
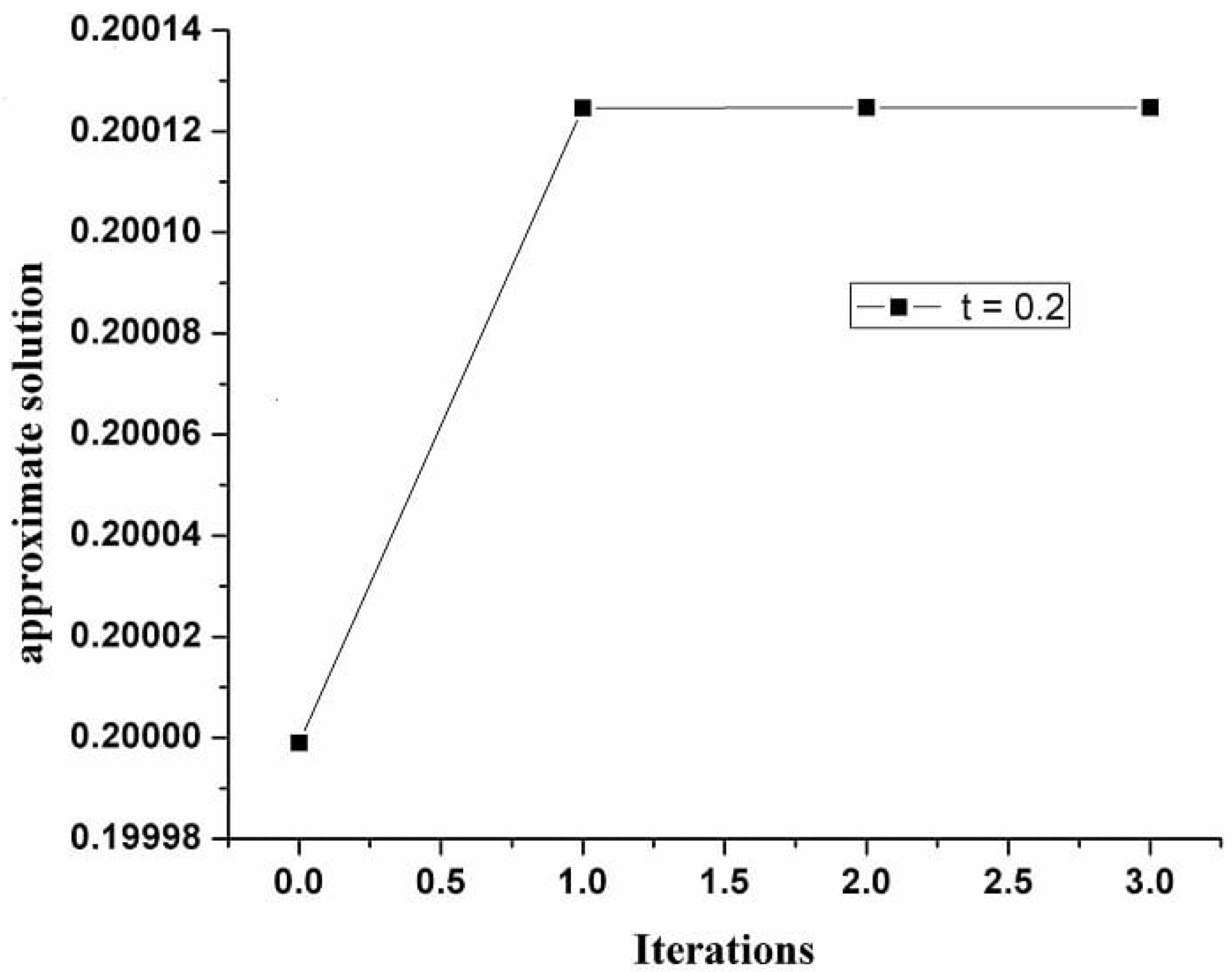
In this section, a numerical example is established to indicate the significance of the given results.
Let S be a set of all continuous real-valued functions defined on [0,1], i.e., . Define and by and , respectively. Clearly, is a complete -metric space.
Let
be the operator defined by:
Let
, and
. Then, (5.1) becomes:
Suppose the following conditions hold.
, and are continuous
with for all
As a result, the conclusion is that all axioms of Theorem 1 are satisfied. Consequently, the integral Equation (
12) has a unique solution. It can be easily checked that
is the exact solution of Equation (
12).
Now, we shall use the iteration method to underline the validity of our approaches:
Let be an initial solution.








{kind=link}
{kind=link}