1. Introduction
Forney [
1] introduced the concept of geometrically uniform (
) codes, which included Lattice Codes and Slepian Group Codes [
2]. The elements of the generator group were regarded as arbitrary isometries of the Euclidean space
in that approach. Then, it was possible to put together these two kinds of codes, which had little in common and were treated separately until that time, as part of the same code class.
Besides encompassing these two categories of codes, Forney extended the process of signal set partitioning created by Ungerboeck. This is a technique that brings significant gains in signal coding and it was the starting point of coded modulation. Furthermore, codes have good symmetry properties: all Voronoi’s regions are congruent, the signals have the same error probability, and the distance profile is the same for each signal, among others things.
Another important concept developed at the same time was “matched labeling”, proposed by Loeliger [
3]. This concept created a fairly adequate way to associate a signal set with an appropriate algebraic structure. The main motivation was the search for certain linearity to the code. Originally, code linearity was achieved by associating it with a vector space structure or module. In more complex contexts, linearity occurs through an association via an application with the simplest possible algebraic structure. In this work, the application is called matched labeling, and the algebraic structure used is the group structure. In his main result, Loeliger proved that signal sets matched to groups are equivalent to Slepian signals. He also demonstrated that if the group is commutative, any set of signals is equivalent to phase modulation encoded with linear codes over
. Both concepts were discussed in the context of Euclidean spaces, and they have a strong relationship with each other. Loeliger proved that, under certain conditions, such concepts are equivalent.
Because of the good characteristics of codes, several studies have been developed to provide the theoretical basis necessary to extend them to larger classes of signal sets.
In this sense, for instance, signal labeling from a QAM constellation of cardinality
M by elements of a finite group coming from a finite field appeared in the works [
4,
5], and only by elements of an additive group
G of cardinality
M that need not necessarily come from a finite field, as shown in [
6]. The alphabets in these papers are coset representatives derived from the quotient of integer rings by proper ideals. Labeling groups are matched via a discrete Mannheim metric. These signal sets are subsets of signal spaces identified by the integer rings
and
, where
i and
are the fourth and third roots of unity, respectively.
The signals of these constellations in and can be described geometrically as a finite set of points coming from a set of barycenters of squares taken from a regular tessellation by squares and by a set of barycenters of regular hexagons taken from a hexagonal tessellation, respectively.
In addition, working in environments outside of the Euclidean space has proven to be a very promising approach since certain properties of these spaces can be effectively exploited in the design of new codes.
For instance, Albuquerque et al. [
7] demonstrated that using two-dimensional surfaces with genus
, it is possible to obtain a more efficient quantum error-correcting codes in terms of error probability, and it is known that the inherent geometry of such surfaces is hyperbolic geometry. In [
8], Silva et al. introduced signal constellations in the hyperbolic plane as an alternative to the traditional signal constellations in the Euclidean plane, and such constellations were used to achieve better performance for the transmission of digital signals, for example, in line power transmission. The regular tessellation
exists in the hyperbolic plane, where
q regular hyperbolic polygons with
p sides meet at each vertex if and only if
. Thus, there are an infinite number of tessellations with regular polygons in hyperbolic space, whereas in Euclidean space there are only three classes, given by squares, hexagons, and equilateral triangles. These are some of the main features that make the hyperbolic space extremely conducive to the construction of
codes.
The authors of [
9] proposed a generalization of the concept of geometrically uniform codes from Euclidean to hyperbolic space, as well as a characterization of the equivalence proved by Loeliger in [
3] in both Euclidean and hyperbolic spaces, using the concept of
G-linearity. We recall that
G-linearity is a generalization of the
-linearity, and it was used in order to ensure the geometrical uniformity of nonlinear codes. An essential aspect of this concept is the search for labeling between environment spaces instead of labeling between codes [
9,
10]. A code
S is
G-linear if it is the image of a group code on
G by an isometry between the environment spaces (the formal definition of
G-linearity will be given in
Section 2). In that approach, it is necessary to have a group
G, a right invariant metric (or bi-invariant metric in some cases) for
G, and an alphabet.
Because the hyperbolic plane, unlike the Euclidean plane, lacks a vector space structure, determining the group of labels for a signal constellation becomes more difficult when they are characterized as a finite set of points derived from a set of barycenters of polygons taken from a hyperbolic tessellation, because we must consider these signals as representing lateral classes of a quotient group . If we consider as the symmetry group associated with signal points in the hyperbolic plane, then H must be a normal subgroup in .
Gomes et al. [
11] presented a systematic way of labeling geometrically uniform codes in hyperbolic environments arising from surfaces. In this case, the authors worked with triangular tilings on the double torus and, despite explicitly providing the labels for the codes, the metric used was the hyperbolic metric coming from the ambient space. There were no alternatives to labels with discrete metrics, which is a desirable feature in many cases.
In this paper, we propose a general treatment of the metric, providing a necessary and sufficient condition for an isometry between a group G and a signal set S to be considered a matched labeling. We present the definition of G-isometric signal set, which allows us to connect the various concepts discussed in this work. Despite emphasizing through examples the hyperbolic case because of its rich properties and Euclidean cases for historical reasons and applications, the results are valid for any metric space. Another key aspect of the current proposal is the emphasis on the role of environment metric space, the G group metric, and the matched map in the signal set labeling process. This new approach, unlike G-linearity, does not require an a priori alphabet. For the labeling process, the alphabet is obtained naturally from the relationship between the set S and the group of labels derived from its symmetry group . The fact that it does not require prior knowledge of an alphabet is a very useful feature, since in the applications we have only the set S and the environment space in which S is considered, which makes such a need an artificial hypothesis.
In summary, in our context, the search for “linearity” is performed by extracting a subgroup of the symmetries group from the metric space and then by searching for a matched labeling between the signal set and the elements of this group, according to Definition 8. The metric used is of fundamental importance in this process, a fact that will become evident throughout the present work.
Section 2 presents basic concepts, notations and results concerning
codes and matched labeling. In
Section 3, we introduce the
G-isometric signal sets, as well as the main results.
Section 4 presents several examples of constructions of
G-isometric signal sets and matched labelings to a group
G. We have signal sets in the Euclidean and hyperbolic spaces. Finally,
Section 5 concludes the article.
2. Definitions and Basic Results
In this section, we give the basic definitions and results that are fundamental to the work.
If M is a non-empty set and d is a metric on M, then M is a metric space denoted by . The group of all isometries of M is denoted by , where the composition operation is the group operation.
A code is any non-empty subset S of M, and if in addition, S is discrete, then it will be called a signal set.
Definition 1. A signal set S is geometrically uniform () if, given any two points s and of S, there exists an isometry such that and .
Thus, if denotes the symmetry group of S, then it is geometrically uniform if the action of on S is transitive, that is, if the orbit of any point in S on the action of is S.
A geometrically uniform set S is called a uniform constellation if it is finite, and a regular array if it is infinity.
Example 1 ([
1])
. Let be the signal set given by the four vertices of a square in the metric space . The symmetric group is given by eight symmetries of the square, i.e., (dihedral group).(a) If we take , we obtain that S is invariant under the action of , which means that the signal set S is geometrically uniform.
(b) Consider the rotation subgroup of , that is, the set of rotations multiples of . We also obtain that S is invariant under the action ofwhere represents the rotational angle c. Therefore, S is geometrically uniform. (c) Let us consider the subgroup of generated by the compositions of the reflections about axis x and axis y. We also find that S is invariant when is applied. Therefore, S is geometrically uniform.
We saw in Example 1 that non-trivial subgroups of the symmetry group associated with a signal set S can be used to show that S is geometrically uniform. As we will see below, these are the subgroups of interest that are sought in practice. In this sense, we consider Definition 2.
Definition 2. Given a signal set S, a subgroup of is a generator group of S, if for an arbitrarily fixed , and is minimal, if the map defined by is bijective.
It is clear that the map m induces on S the group structure of . Thus, m may be considered an isomorphism between groups.
Example 2. Let S be the signal set in given by , where (the M-th root of unity) and . In communication theory, S is called an M-PSK signal set. We have that is a natural generating group for S, where is the group of rotation multiples of , which is isomorphic to (the additive group of integers modulo M).
Let be the composition of the elements of with the elements of the group V, where V is the group formed by the identity and the reflection between the line determined by the origin and the midpoint of two adjacent signals of S. Then, is the group of symmetries of S. The M-ary dihedral group (semidirect product of by V) is isomorphic to . If M is an even number, we have a particular generator set, .
Remark 1. The signal set of Example 1, is obtained through a rotation of the 4-PSK signal set described in the form , where (the 4-th root of the unit) and . Or rather, , where is an isometry of given by a rotation matrix.
Remark 2. It is not true that all geometrically uniform code has a minimal generator, see [1]. Moreover, if there is a minimal generator group, it is not necessarily unique, i.e., there are geometrically uniform codes which allow more than one minimal generator group, such that they are not isomorphic to each other, as we saw in Example 1, where the groups and are groups with distinct minimal generators and are not isomorphic to each other. The following theorem establishes a sufficient condition for signal sets to be .
Theorem 1. Let S be a signal set and be its group of symmetries. If a subgroup H of acts transitively on S, then it is geometrically uniform.
Proof. Let
H be a subgroup of
that acts transitively on
S. Then, for a fixed
we have that
. We claim that
S is
. Indeed, for given
, there exist
and
in
H, such that
and
. Taking
, we have
Now, since
, it follows that
and
. Thus,
Therefore,
S is
. □
Loeliger [
3] introduced the notion of signal sets matched to groups, which is closely related to geometrically uniform codes.
Definition 3. A signal set S is matched to a group G if exists a map m from G onto S such that, for all g and h in G,where e denotes the neutral element of G. A map m satisfying this condition is called a matched map. If we also have that m is injective, then is called a matched labeling. Theorem 2. If Λ is a transitive group of isometries of a signal set S in a metric space , then S is matched to Λ and, for all , the mapping given by , , is a matched map. Reciprocally, if the signal set S is matched to a group G, then there exists a homomorphism from G onto a transitive subgroup of .
Proof. Since
is a transitive group, then
is onto. For all
in
one has
Reciprocally, let
m be a matched mapping from the group
G onto the signal set
S. For all
, let us consider the map
such that, given
. let
with
. Then,
, which is well defined. If
and
for some
g and
in
G, then
which shows that
is an isometry of
S, defined for each
. Thus, we have a map
. Let
. Then,
and it follows that
f is a homomorphism from
G onto
. Thus,
is a group. Furthermore,
is transitive. Indeed, for
let
. Let
be any element of
S and let
satisfying
. Thus,
, implying that
. □
As a result, a signal set S is matched to a group G via a matched map if and only if G is homomorphic to a transitive subgroup of , the symmetry group of S. This result is due to Loeliger for the Euclidean case, but the result is valid regardless of the metric used. Therefore, it is also valid in hyperbolic spaces. As a consequence of this theorem, one has the following result, which is fundamental in this work:
Corollary 1. If there exists a matched labeling between the signal set S and the group G, then G is isomorphic to a transitive subgroup of .
Proof. This follows in a similar way to the reciprocal of Theorem 2, but in this case we have that m is a bijection, then we obtain that f is an injection. Thus, G is isomorphic to , which acts transitively on S. Therefore, the result follows. □
Remark 3. The reciprocal of Corollary 1 is not true. Consider the signal set of the Example 1. We have seen that acts transitively on S. There are eight symmetries of the square and these symmetries are the elements of the dihedral group . Taking , as and (the number of elements in is greater than the number of elements in S), it follows that there is no bijection between G and S, so there will be no matched labeling between them. However, there will be matched map from group onto signals set S.
The next result follows immediately using the Corollary 1 and the Theorem 1. It is interesting because S does not need to have a minimal generator . It seems to be new in the literature.
Corollary 2. If there exists a matched labeling between the signal set S and the group G, then S is geometrically uniform.
Definition 4. Let G be a group. A function is compatible with the group operation ifMoreover, if is a metric on G, then is a group metric. Example 3. Let be the additive group of integers modulo M. Taking in the map given by , it is easily proved that defines a metric in . On the other hand, we have that and in , it follows thatfor all . So, by the Definition 4, is a group metric. Remark 4. If is a group metric on a group G, then , given byis a group metric on . Definition 5. Let G be a group, a group metric in G and a code of length n on the alphabet A, with a metric on . We say that C is G-linear if C, or an equivalent code , is an image of a group code H on the group G, that is, , where is an isometry between and .
We now have a result that demonstrates the importance of having a minimal generator set for geometrically uniform codes S.
Theorem 3. Let S be a signal set in a metric space . Then they are equivalent:
- (a)
S is a geometrically uniform code with a minimal generator ;
- (b)
a matched labeling exists between and S.
- (c)
S is a -linear code with .
Proof. Since
S is
with minimal generator
,
for an
fixed. Thus,
, given by
is a bijection. Now, for every
we have that
Thus,
is a matched labeling.
It follows from Theorem 1, since we assuming we have .
Again, since we are assuming we have , it follows that S is geometrically uniform with minimal generator .
Since S is with minimal generator , for a fixed , and , given by is a bijection. Considering in the induced metric of S by , it follows that m will be an isometry. Therefore, we have that S is -linear. □
Remark 5. We have two minimal groups given by and that act transitively on S, implying that S is geometrically uniform, for the signal set S from Example 1. On the other hand, we know that the group of rotations and the group , where denotes the identity, and denote the reflection about x axis and y axis, respectively. We also have that and . As a result of Theorem 3, from the signal set S and the two distinct non-isomorphic subgroups of the symmetry group , we obtain two different codes S that have the properties of being G-linear, one with a label group given by and another with a label group given by .
Definition 6. Let U be a subset of a group G and let . Then G is generated by U if, for all there exists such that , where for all . If U is finite, then G is called finitely generated.
Every finitely generated group admits, quite naturally, a metric. In fact, given a generator set U of G, every element g in G can be written as a finite combination of elements of . Consider that the number of elements of required to write g is a length associated with g. We may now define the norm of g as follows: is the least of all possible lengths for g. This norm induces a metric on G as follows: for every let . This metric is known as the word metric.
It must be observed that for all
one has
3. Isometries and G-Isometric Signal Sets
In this section, we introduce some more concepts as well as the main results. We will seek to clarify the reasons for the current proposal and its relation to previous works.
Two signal sets S and in a metric space are equivalent if there is an isometry such that .
Let be the space formed by all signal sets in the metric space M. It is verified that the equivalence between signal sets in defines an equivalence relation; that is, signal sets that are equivalent are in the same equivalence class in .
Example 4. Consider the 4-PSK signal set described in Remark 1, which is given by , where . Let be the signal set given by , where denotes rotation matrices of with rotation angle θ. So, the set denotes the set of all signal sets that are in the same equivalence class in and whose class representative is the signal set .
Definition 7. Given a group G and a metric d on G, then d is left invariant if for all . Similarly, d is right invariant if for all . If d is both left and right invariant, then d is bi-invariant.
Example 5. Let be the additive group of integers modulo M. When we consider the group metric defined in Example 3, we obtainfor all . Thus, we can conclude that the group metric is left invariant. Similarly, it is proved that is right invariant. Therefore, is bi-invariant. For more details about invariant metrics, see [
12]. Now, we introduce a main definition to the work, which was inspired by the concept of
G-linear codes, see [
13].
Definition 8. Let G be a group and S a signal set of a metric space M. S is G-isometric if there is an isometry , where is a metric on G, is the metric in , and is left invariant.
Example 6. Let S be the M-PSK signal set in given by the vertices of a polygon with M sides inscribed in the unit circle, that is, .
The elements of S can be seen as images of the map given by , that is, each element is a label of an element . For convenience we also denote by k.
The Lee metric (see [14]) on S is defined as followswhere are vertices of a polygon of M sides that assumes labels in ascending order of elements . We prove that the map m defines an isometry , where . Let . We have that In (1) one has , if , and , if . Thus, , for all . Therefore, the map m is an isometry between and .
Example 7. Let and S be the 8-PSK signal set given by . Then, we have:
(1) Taking and , we have that . When we take the vertices in the regular octagon labeled by 5 and 3, we have , as can be seen in Figure 1. (2) Taking and , we have that . Taking the vertices in the regular octagon labeled 2 and 7, we obtain , as can be seen in Figure 1.
Figure 1.
The 8-PSK signal set.
Figure 1.
The 8-PSK signal set.
Remark 6. Note that when , the Lee metric in a signal set in coincides with the Hamming metric.
Remark 7. By environment metric space, we are referring to the space where the signal sets are being constructed. As a consequence of Definition 8, we conclude that the concept of G-isometric is an algebraic invariant that is preserved for all signal sets that are part of the same equivalence class in the space . That is, if S and are two equivalent signal sets, then, S is G-isometric if and only if, also is G-isometric.
Remark 8. Definition 8 requires an isometry between the code S and the group G, instead of an isometry between the code S and a group code on G, as we have in the G-linearity (see Definition 5). Moreover, we do not require an isometry between the environment spaces. The isometry is just between G and S. The metric for the group G must be left invariant, and we do not need right invariance, as required for G-linearity. Another important point is that it is not necessary to have an alphabet for S. Once the isometry with the group G is determined, the alphabet is presented.
The next theorem shows that the left invariance of the group metric is the main condition for an isometry between a group and a signal set to be a matched labeling. That is, an isometry labels a signal set by a group only if the group metric is left invariant.
Theorem 4. Let be an isometry. If is left invariant, then the map is a matched labeling.
Proof. For all
one has
where
e is the neutral element of
G. Since
m is bijective we obtain that
is a matched labeling. □
It follows from Theorem 3 that if S is with minimal generator, we always have a matched labeling between and S but, from Theorem 4, for an isometry be a matched labeling, we need compatibility between the metric of the space and the group structure of , that is, the natural metric of (that one inherited from is useful in the process of labeling by isometries, if the metric gives left invariance to the labeling group .
However, even when we do not have such compatibility, it is possible, in some cases, to endow with a different metric than the one of , so that we may ensure the left invariance property for the group of labels. The following corollary provides an alternative in this direction.
Corollary 3. Let S be a signal set. If there is a finitely generated group G and a bijection , then is a matched labeling.
Proof. Let G be a finitely generated group. Then, we endowed G with the word metric, which is left invariant. Since is a bijection from G to S, then it is enough to consider on S the metric induced by G through m, instead of consider the metric given by M. Thus, m is an isometry, and by Theorem 4, is a matched labeling. □
In other words, under the above conditions, any bijection between a finitely generated group and a signal set can be considered a matched label. To accomplish this, simply apply the map m to S and induce the metric of G. In this case, all the code properties, both algebraic and metric, are inherited from the group G regardless of the environment metric space of S.
Example 8. Let , which is a finitely generated group.
(1) Let with a signal set in . Considering the bijection given by given by , by Corollary 3 we conclude that is a matched labeling.
(2) Let with and be a signal set in (hyperbolic plane). Moreover, considering the bijection given by given by , by Corollary 3 we conclude that is a matched labeling.
Theorem 5. Let G be a group and be any metric on G. If is a matched labeling, where is an isometry, then is left invariant.
Proof. Thus, is left invariant. □
The previous result requires that G has a metric , and also that there is an isometry for that metric. The next result shows that it is enough to have a matched labeling between G and S, such that we can induce a metric in G and obtain an isometry.
Theorem 6. Let be a matched labeling where . If we consider on G the metric induced by S through , then is left invariant.
Proof. Considering on G the metric of S induced by , the construction implies that m is also an isometry, and by Theorem 5, it follows that is left invariant. □
This theorem says that a matched labeling may also be considered an isometry. It is enough to consider in the group G the metric induced from the signal set S by . This is independent of the metric of M and always gives a left invariant metric to the group of labels.
The next result is the main result of the current work, where we obtain that, if a signal set is G-isometric, then this is equivalent to the existing matched labeling between G and S.
Theorem 7. Let S be a signal set and G be a group. Then, S is G-isometric if, and only if, is a matched labeling, where .
Proof. Let
S be a
G-isometric signal set. It follows from Theorem 4 that
is a matched labeling. Conversely, suppose that there is a matched labeling between
G and
S, that is,
is a bijection, and it satisfies
for every
g and
h in
G. According to Theorem 6,
is left invariant, where
is the metric induced by
S through
. Thus, we have that
m is an isometry, and therefore, it follows that
S is
G-isometric. So, it follows the result. □
Example 9. Let and with be signal sets in and with be a signal set in . As a consequence of Example 8 and the Theorem 7, we conclude that the signal set S in is -isometric and the signal set in is also -isometric.
Remark 9. We conclude from Example 9 that the 8-PSK signal set given in the form , that is in the same equivalence class of the signal set S, is -isometric, where denotes an isometry of given by rotation matrix with angle θ.
We have seen in this section that if a signal set S in a metric space is G-isometric, then the signal sets in M that have S as equivalence class representant are also G-isometric, as illustrated in item (a) of Example 9. As shown in item (b) of Example 9, there are signal sets S and that are G-isometric at the same time, but they are not in the same equivalence class and even in different metric spaces.
In the next section, we will discuss situations of this nature in greater depth, where we will see in particular that they are associated with the metric structure of the minimal groups that we will take as subgroups of the isometry group in the metric space in question.
Corollary 4. Let S be a signal set in a metric space . Then, the following statements are equivalent:
- (a)
the code S is geometrically uniform with minimal generator ;
- (b)
there exists a matched labeling between and S;
- (c)
the code S is -isometric.
Proof. The equivalence between and follows from Theorem 3, and the equivalence between and follows from Theorem 7. □
The last two results give a characterization of the equivalence established by Loeliger. Since the result does not depend on the metric space under consideration, it is valid for hyperbolic and Euclidean cases. The aim is to search for isometries between signal sets and groups with a left invariant metric. Note that the advantage of this result in relation to Theorem 3 is that we do not need a group code or an alphabet.
Remark 10. Consider the signal set 4-PSK, of Example 8. As the signal sets are in the same equivalence class, using the alphabet given by the group of labels , we conclude that each signal set/codes is -isometric. Similarly, using of the alphabet given by the label group , we conclude that each one of the signal sets / codes and are -isometric.
However, it is worth noting that, depending on the application we are considering, there are representatives in the equivalence class that are more convenient because of the geometric arrangement of the signals, as is the case when looking for a signal set of maximum diversity, that is, when all the components of the signal points of the signal set are distinct, which is useful in transmission models in Rayleigh channels.
4. Construction of G-iSometric Signal Sets and Matched Labelings to the Group G
In any matched labeling, the algebraic structure is always given by the group of labels, but in relation to the metric proprieties, there are three distinct ways to proceed: consider in the group of labels for the metric given by ; define in the group of labels other metric than the one of , in order that the algebraic and metric structures of are compatible; and consider the metric structure of S inherited of space M.
In the first case, it is necessary to have a previous compatibility between the metric of and the group structure of ; in the second case, such compatibility is obtained by imposition. However, in both cases, the idea is to obtain a matched labeling from an isometry. On the other hand, in the last case, we have the opposite idea. We want a matched labeling that is an isometry. It is possible to endow the group of labels with the geometric properties of the space M using this method. This is not the case in cases (1) and (2). Thus, it is under this approach that the search of metric spaces to obtain new signal sets matched to groups becomes more interesting because, in this way, the geometrical properties of M may be used in the labeling process. Euclidean space is a particular case of this approach.
Case 1: In the first example, we consider the space metric
M given by the Euclidean plane
, the metric of
is the same, [
15]. In this case, we do not have any change if we use either the metric of
M or the metric of the
.
Example 10. Consider the signal set , see Figure 2. A minimal generator group for S isthe group of translations by integers in each coordinate. On the other hand, we know that the symmetry group of S is , where denotes the Dihedral Group of order 8 and ⋉ denotes the semi-direct product of the groups. Thus, one has two possibilities for the generator group of S, (these symmetries are characterized by the composition of a rotation with a translation) and (these symmetries are characterized by the composition of a reflection and a translation), where is the set of rotations by multiples of , and is the group of reflections on any axis. For more details, see [1]. Therefore, by Corollary 4, there is a matched labeling where for each one of the three groups. Hence, in each case, imposing to S the group metric of the labels, induced by m, it follows that m is an isometry. On the other hand, as we have a matched labeling, we can induce the metric of S for the label group, and it follows from Theorem 6 that m is also an isometry.
Figure 2.
Signal set in the plane for Example 10.
Figure 2.
Signal set in the plane for Example 10.
The following example shows three possibilities for the minimal generator group of a signal set S, where the three groups are not isomorphic to each other.
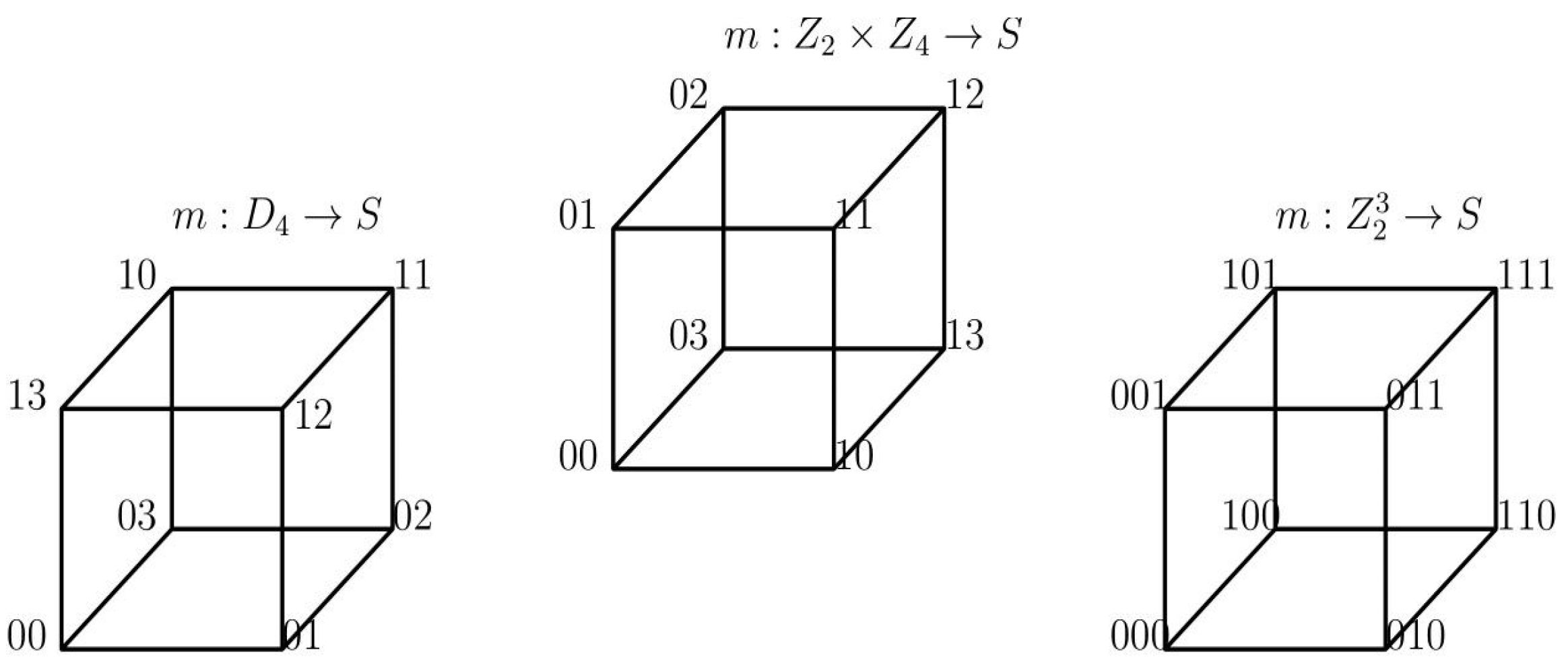
Example 11. Let S be the signal constellation in given by the vertices of a unit cube, in which we consider its center of mass at the origin and its edges parallel to the coordinate axes. There are three non-isomorphic groups acting on S. These groups are: (a) the group generated by , a rotation of order four around the axis , and , a rotation of order two around the axis ; (b) , the group generated by , a rotation around the axis , and , a reflection in the plane , and (c) the group generated by , and , the reflections on the planes , and , respectively. See Figure 3. According to Corollary 4, there is a matched labeling in each case, where . We can take on the metric of through the map for each of these groups of labels, and from Theorem 6, is left invariant, so it is compatible with the group structure of and m is an isometry.
Figure 3.
Signals set for Example 11.
Figure 3.
Signals set for Example 11.
Example 12. Let S be a M-PSK signal set in as described in Example 2. Taking and as the group of Euclidean rotations by angle around the origin, it follows that is a mached labeling where .
Case 2: Here we show an example in the hyperbolic plane, which is a non-Euclidean space.
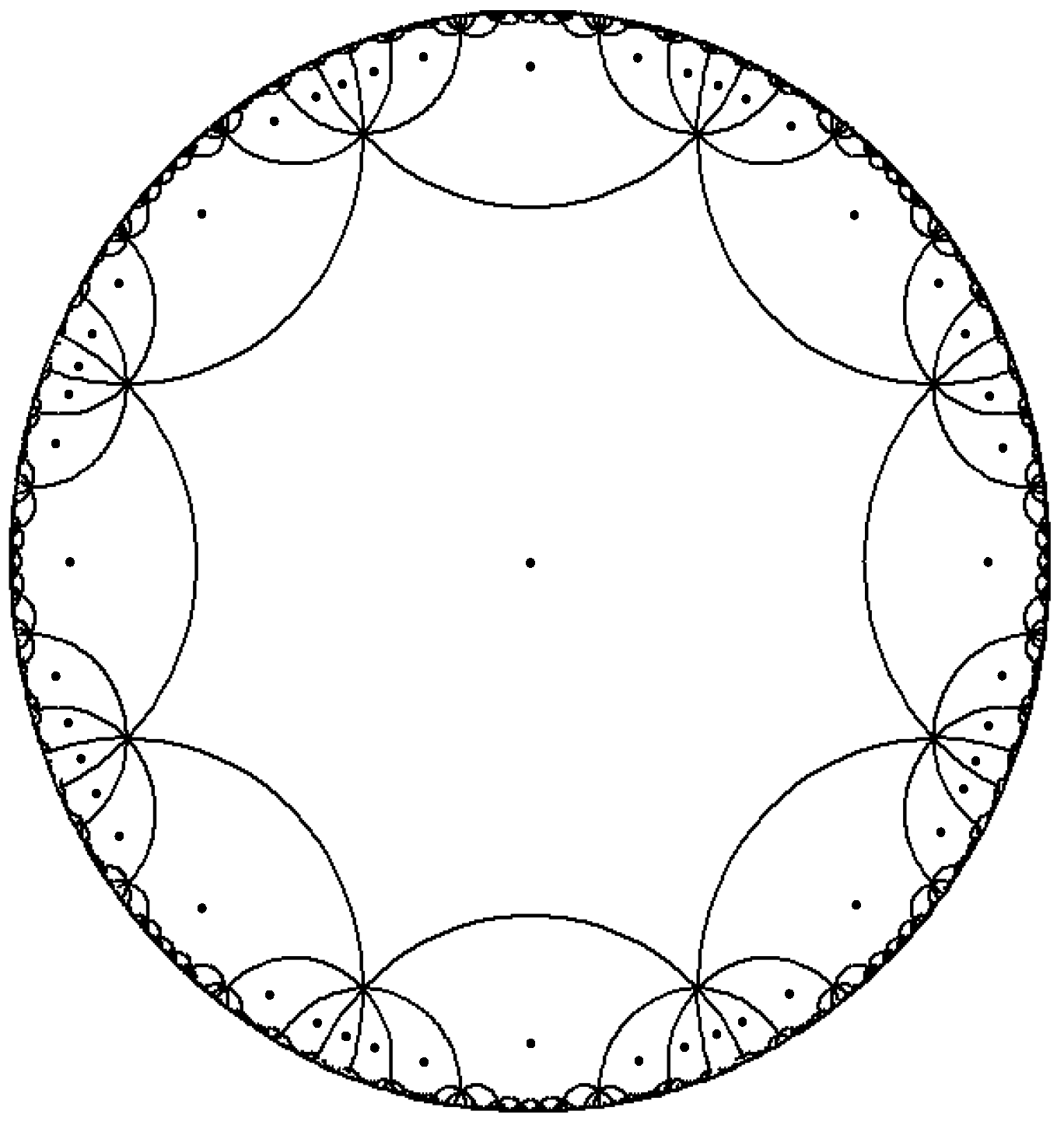
Example 13. In the model of Poincaré disc for the hyperbolic plane, let us consider the Fuchsian groupwhere . The group G has as a fundamental region a regular hyperbolic octagon , and G generates the regular hyperbolic tiling , that is, a tiling of such that, in each vertex, there are eight copies of (see Figure 4). The group G is a group associated with a compact surface with genus 2 (a bitorus) and is a flat model of such a surface. From this information, one haswhere denotes the interior of . Now, represents the center of the i-th octagon of the tiling , and represents an isometry of G that applies to , . Thus, if , the map given by ( is a map such that a point of S is associated with each isometry of the group G. From this construction, , , and , we have that m is well defined and it is bijective.
Because G is a transitive group on S, Theorem 2 states that m is a matched map, but because m is a bijection, is a matched labeling. Note that the metric of M in this case is the hyperbolic metric of , and the metric of is the Euclidean metric of . Whatever metric we adopt, it gives distinct geometric properties.
Figure 4.
Signal set for Example 13.
Figure 4.
Signal set for Example 13.
Example 14. Let us consider the triangular arithmetic Fuchsian group , which has a normal subgroup N of index 5 associated to the bitorus [16,17]. Therefore, , and it follows that subdivides into 5 congruent regions, where and denote the fundamental regions of G and N, respectively. The fundamental region is the regular polygon of the tessellation and the fundamental region is the polygon with 4 equal sides and alternating internal angles and . Thus, we have a tessellation of the flat double torus such that, considering as a signal set S given by the centers of these 5 regions (see Figure 5) we obtain that is a group of labels for S. Taking as the group of hyperbolic rotations by an angle of around the origin of , it follows that is a matched labeling where .
Case 3: In the next example, we have a geometrically uniform code, which may be seen as a signal constellation on a flat torus. For more details, see [18]. As we will see, in this example, it is possible to label using three non-isomorphic groups of labels, each one containing 16 elements.
Figure 5.
The double torus.
Figure 5.
The double torus.
Example 15. Let S be the same set of Example 1. The three possible choices for preserve S and have the subgroup , where is the translation by c, is the rotation of around the origin, is the reflection on the axis y and is the reflection on the x axis. These three symmetry groups preserve S and have in common the subgroup . Consider the signal set in the torus , , which can be seen as the set of vertices of a regular graph in (see Figure 6). Each one of the three choices for induces a different label for the 16 points of , that is, for the tessellation in the torus. We have , and . In a similar way to Example 4, endowing the group of labels with the metric of the flat torus, the matched labeling is an isometry. Remark 11. It is worth noting that in item (c) of Example 11, we saw that is one of the possibilities. Notice that the alphabet is obtained naturally from the relationship between the set S and the group of labels coming from its symmetry group during the labeling process, and in this case, the natural distance matched to S is the Hamming metric.
In Example 15, we saw that there are three possibilities for the group of labels for the signal set in the double torus, among these we have and . For the case where , we have that the alphabet is obtained naturally from the relationship between the set and the group of labels coming from its symmetry group during the labeling process and in this case the natural distance matched to ís the Hamming metric.
In the case where , the alphabet is obtained naturally from the relationship between the set and the group of labels derived from its symmetry group during the labeling process, and the natural distance matched to is the Lee metric. The fact that it does not require prior knowledge of an alphabet is a very useful feature, since in the applications we have only the set S and the environment space in which S is considered, which makes such a need an artificial hypothesis.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





