
Construction of General Implicit-Block Method with Three-Points for Solving Seventh-Order Ordinary Differential Equations


Abstract
:1. Introduction
2. Preliminary
2.1. The General Quasi-Linear Seventh-Order ODEs
Special Class Quasi-Linear Seventh-Order ODEs
2.2. RKM Methods for Solving Special Class Quasi-Linear Seventh-Order ODEs
3. Analysis of Proposed GIBM3P Method for Solving General Quasi-Linear Seventh-Order ODEs
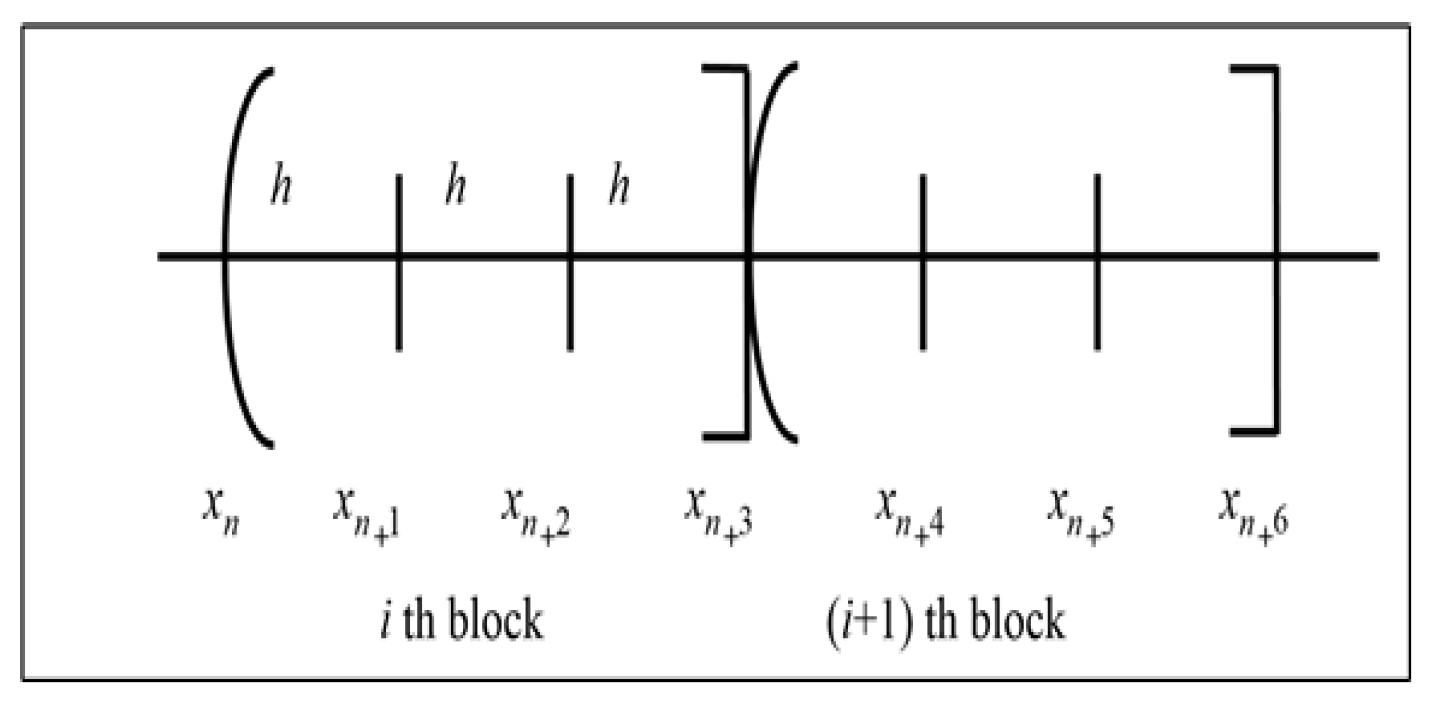
3.1. Proposed GIBM3P Method
Hermite Polynomials
3.2. Derivation of Proposed GIBM3P Method
3.3. The Zero-Stability and the Order of the Proposed GIBM3P Method
3.3.1. Order of the GIBM3P Method
3.3.2. Zero-Stability of the New Method
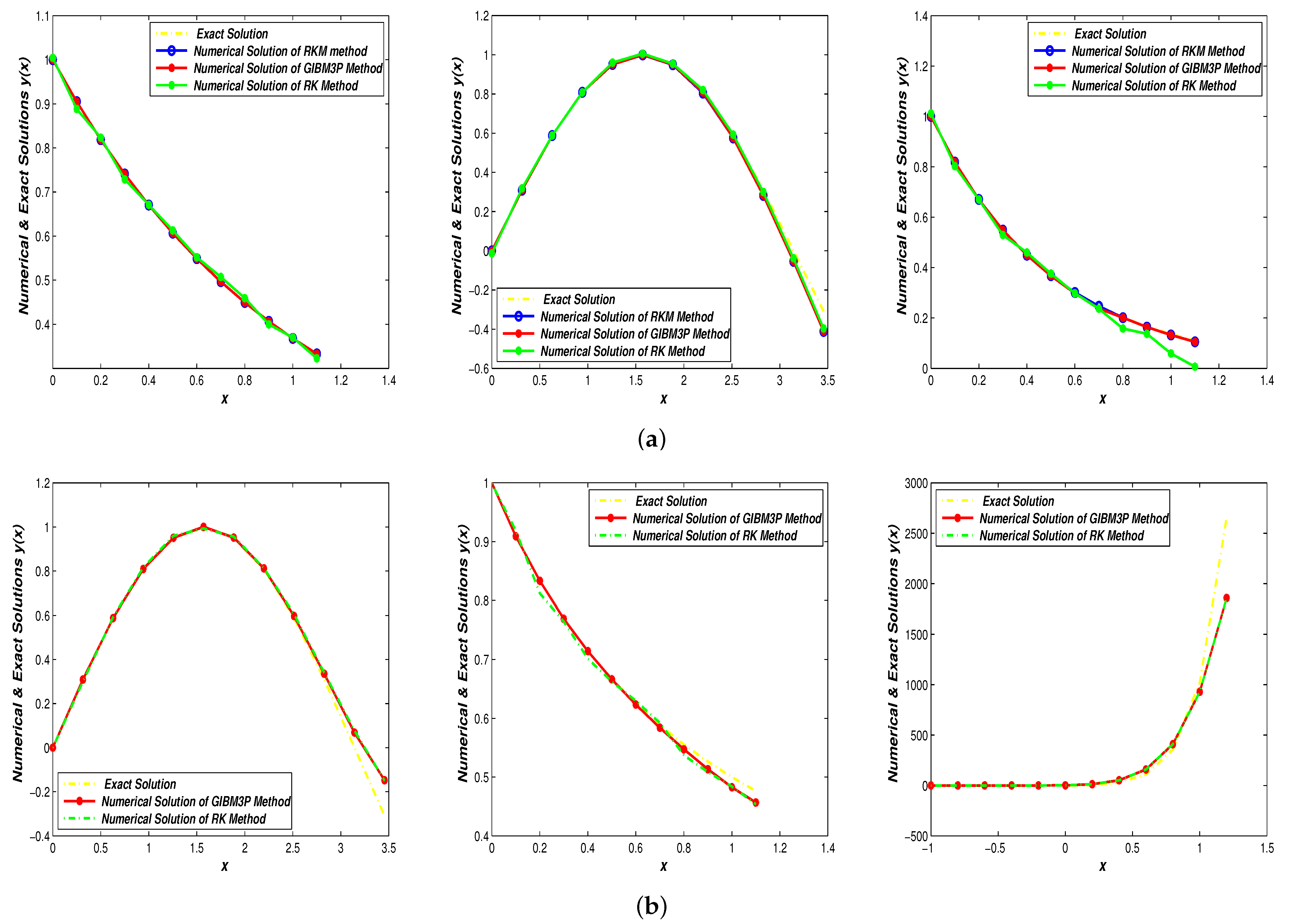
4. Numerical Implementations
- RK Classical Runge–Kutta method.
- RKM Direct Runge–Kutta–Mohammed method.
- GIBM3P Proposed direct implicit block with three points method.
Problems Tested of ODEs
- Initial conditions,
- Exact solution:
- Initial conditions,
- Exact solution:
- Initial conditions,
- Exact solution:
- Initial conditions,
- Exact solution:
- Initial conditions,
- Exact solution:
- Initial conditions,
- Exact solution:
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Twizell, E.; Boutayeb, A. Numerical methods for the solution of special and general sixth-order boundary-value problems, with applications to Bénard layer eigenvalue problems. Proc. R. Soc. Lond. A 1990, 431, 433–450. [Google Scholar]
- Akram, G.; Siddiqi, S.S. Solution of sixth order boundary value problems using non-polynomial spline technique. Appl. Math. Comput. 2006, 181, 708–720. [Google Scholar] [CrossRef]
- Mechee, M.S.; Mshachal, J.K. Derivation of embedded explicit RK type methods for directly solving class of seventh-order ordinary differential equations. J. Interdiscip. Math. 2019, 22, 1451–1456. [Google Scholar] [CrossRef]
- Turki, M.Y.; Alku, S.Y.; Mechee, M.S. The general implicit-block method with two-points and extra derivatives for solving fifth-order ordinary differential equations. Int. J. Nonlinear Anal. Appl. 2022, 13, 1081–1097. [Google Scholar]
- Allogmany, R.; Ismail, F. Direct Solution of u″ = f(t,u,u′) Using Three Point Block Method of Order Eight with Applications. J. King Saud-Univ.-Sci. 2021, 33, 101337. [Google Scholar] [CrossRef]
- Allogmany, R.; Ismail, F.; Majid, Z.A.; Ibrahim, Z.B. Implicit two-point block method for solving fourth-order initial value problem directly with application. Math. Probl. Eng. 2020, 2020, 6351279. [Google Scholar] [CrossRef]
- Allogmany, R.; Ismail, F. Implicit three-point block numerical algorithm for solving third order initial value problem directly with applications. Mathematics 2020, 8, 1771. [Google Scholar] [CrossRef]
- Turki, M.; Ismail, F.; Senu, N.; Ibrahim, Z.B. Direct integrator of block type methods with additional derivative for general third order initial value problems. Adv. Mech. Eng. 2020, 12, 1687814020966188. [Google Scholar] [CrossRef]
- Senu, N.; Mechee, M.; Ismail, F.; Siri, Z. Embedded explicit Runge–Kutta type methods for directly solving special third order differential equations y‴ = f(x,y). Appl. Math. Comput. 2014, 240, 281–293. [Google Scholar] [CrossRef]
- Mechee, M.S. Generalized RK integrators for solving class of sixth-order ordinary differential equations. J. Interdiscip. Math. 2019, 22, 1457–1461. [Google Scholar] [CrossRef]
- Jan, M.N.; Zaman, G.; Ahmad, I.; Ali, N.; Nisar, K.S.; Abdel-Aty, A.H.; Zakarya, M. Existence Theory to a Class of Fractional Order Hybrid Differential Equations. Fractals 2022, 30, 2240022. [Google Scholar] [CrossRef]
- Moaaz, O.; El-Nabulsi, R.A.; Muhib, A.; Elagan, S.K.; Zakarya, M. New Improved Results for Oscillation of Fourth-Order Neutral Differential Equations. Mathematics 2021, 9, 2388. [Google Scholar] [CrossRef]
- Cesarano, C.; Moaaz, O.; Qaraad, B.; Alshehri, N.A.; Elagan, S.K.; Zakarya, M. New Results for Oscillation of Solutions of Odd-Order Neutral Differential Equations. Symmetry 2021, 13, 1095. [Google Scholar] [CrossRef]
- Mechee, M.S.; Mshachal, J.K. Derivation of direct explicit integrators of RK type for solving class of seventh-order ordinary differential equations. Karbala Int. J. Mod. Sci. 2019, 5, 8. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
| 0 | 0 | ||
|---|---|---|---|
| 0 | |||
| 0 | |||
| 1 | 0 | ||
| 0 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Turki, M.Y.; Salih, M.M.; Mechee, M.S. Construction of General Implicit-Block Method with Three-Points for Solving Seventh-Order Ordinary Differential Equations. Symmetry 2022, 14, 1605. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14081605
Turki MY, Salih MM, Mechee MS. Construction of General Implicit-Block Method with Three-Points for Solving Seventh-Order Ordinary Differential Equations. Symmetry. 2022; 14(8):1605. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14081605
Chicago/Turabian StyleTurki, Mohammed Yousif, Mohammed Mahmood Salih, and Mohammed S. Mechee. 2022. "Construction of General Implicit-Block Method with Three-Points for Solving Seventh-Order Ordinary Differential Equations" Symmetry 14, no. 8: 1605. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14081605