

Asymptotic Rules of Equilibrium Desingularization


1
Department of Mathematics, Bar-Ilan University, Ramat-Gan 5290002, Israel
2
Faculty of Sciences, Holon Institute of Technology, Holon 5810201, Israel
*
Author to whom correspondence should be addressed.
Symmetry 2022, 14(10), 2186; https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102186
Submission received: 12 August 2022
/
Revised: 26 September 2022
/
Accepted: 10 October 2022
/
Published: 18 October 2022
(This article belongs to the Special Issue Asymptotic Methods in the Theory of Differential Equations and Mathematical Physics)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:A local bifurcation analysis of a high-dimensional dynamical system is performed using a good deformation of the polynomial mapping . This theory is used to construct geometric aspects of the resolution of multiple zeros of the polynomial vector field . Asymptotic bifurcation rules are derived from Grothendieck’s theory of residuals. Following the Coxeter–Dynkin classification, the singularity graph is constructed. A detailed study of three types of multidimensional mappings with a large symmetry group has been carried out, namely: 1. A linear singularity (behaves similarly to a one-dimensional complex analysis theory); 2. The lattice singularity (generalized the linear and resembling regular crystal growth models); 3. The fan-shaped singularity (can be split radially like nuclear fission and fusion models).
MSC:
37J35; 37K101. Introduction
The local structure of solution in high dimensional systems of a differential equation was studied, especially near one of its equilibrium points c. Suppose that mapping is smooth enough in neighborhood of c, f(c) = 0. One can consider instead of the polynomial system as approximation near . Here, , , is multindex, and .
Our goal is to introduce properties of polynomial dynamical systems depending on the bifurcation parameter . When the parameter is changed, the phase portrait, in many cases, can be slightly deformed without changing its qualitative (topological) features. However, sometimes, the dynamics can change significantly, causing a qualitative change in the phase portrait. Bifurcation theory [1] studies these qualitative changes in the phase portrait, i.e., the appearance or disappearance of other equilibrium as new bifurcation points, equilibrium orbits, or more complex objects.
The present article considers a particular type of bifurcation. Namely, the bifurcations are influenced here by a good deformation at a singular point.
Fix a point as a zero of multiplicity of a polynomial vector map . This means that and P is non vanishing in some punctured neighborhood of c. We can also declare that, for these zeros, holds. Here, and in the sequel, denotes the Jacobian matrix of a map P computed at the point x.
Definition 1
(cf. [2]). A one-parameter family of polynomial maps is called a small deformation of P near c if and for any small , there are roots of sufficiently close to c.
If, in addition, all roots of near c with small enough are simple, then the deformation is called good.
Example 1.
Consider mapping taken from Example 3 on page 85 in [3]. Let us construct small deformation P near 0 as . This deformation is not good. The point is a double root of , and therefore, the last item in Definition 1 is not fulfilled. In contrast, the small deformation P near 0 taken in the form is good. There are five zeroes of which lie near the origin, namely, They are all simple (regular) roots of . Using the Newton polygon technique, we obtain the multiplicity of the origin equal to 5, obtained in [3]. Singularity at zero is type in the Dynkin diagram classification.
If deformation of the polynomial map has exactly m simple zeros , all lie in a small neighborhood of the point c (for sufficiently small ), then is evidently good. Generally speaking, it is not easy to construct explicitly good deformations [4]. The foremost steps in this direction were taken, which the paper addressed naturally.
The main goal of this contribution is threefold:
- To explain a step-by-step algorithm for a good deformation construction (see Section 2);
- To establish asymptotic laws of an equilibrium decomposition/collision, based on the Grothendieck residual formula [5] (see Section 2.7);
The multidimensional residual theory makes it possible to introduce new and diverse local laws and symmetries. The article’s results can further enrich the functionality of the existing variety of methods for studying the local bifurcations theory of polynomial vector fields.
The standard theoretical method for studying bifurcation features is the so-called singularity resolution. Sometimes, it is called desingularization. Upon appropriate transformation/warping of a given map, a composite singularity [7] decomposed it into a cluster of simpler ones.
The traditional implementation of a desingularization based on the principles of miniversal deformations (for example, unfolding related to deformations of the basis of the local algebra of singularities, see [3,8,9]). A typical singularity resolution is a “blow-up” of the singularity, where the singular point is replaced by an n-sphere/projective space [4,10,11,12,13].
This article proposes an approach to determining the type of a singular point through the geometry of a bifurcation. We employ a method of good deformations (one-parameter deformations such that simple singularities merge to one multiple, and vice versa, see [2]). We build scenarios for desingularization or assembly singularity back [8]. A local bifurcation diagram shows a value “visited” roots of the perturbed polynomial map [9].
This article is explanatory and is mainly devoted to the geometric aspects of desingularization and local bifurcation, as the primary purpose of this article. In particular, restoring the type of singularity by the known properties of its bifurcation is solved for homogeneous polynomial maps in Section 4.
We are refining the goals, so we will focus on explaining the results and the main ideas and refer to the cited documents for proof and technical details.
2. Step-by-Step Construction of a Good Deformation in the Sense of Griffiths and Harris
Many authors understand small deformations of polynomial map as small deformations , of the coefficients of their Taylor expansions in the vicinity of a singular point .
Recall that singular point of a vector field is simple if the Jacobi matrix has a nondegenerate determinant. Otherwise, the definition of the type of feature becomes more difficult.
If small deformations could break the singularity of a given vector field in the vicinity of the singular point only into simple ones, then such a deformation is recognized as good.
As a rule, a cluster of simpler singularities arises at good deformations near a critical point .
It turns out that splitting singularities with good deformations generates asymptotic laws in their bifurcations that cannot be broken. Revealing these laws and symmetries is the main task.
2.1. Good Deformations and Associated Geometric Graphs
The existence of good deformations can be easily established using Sard’s Theorem (cf. [2]). The following observation is useful: if is a deformation near c decomposing c into several roots, then the same can be viewed as a deformation gluing these roots into c when . Moreover, one can indicate the pairs of roots of , which can coalesce (independently of other roots), as well as those that cannot merge. These observations lead to a more formal description.
Definition 2.
Let be a deformation near c (in general, not good). Take a small positive ε and let be all the zeros of close to c, . We say that and are incident if there exists a deformation ; V is a small ball near c, such that:
- (i)
- ;
- (ii)
- all singularities of close to c and different from and are the roots of for all ;
- (iii)
- and coalesce into as
Given a good deformation near c, a geometric graph is defined as follows:
- (a)
- for small , the vertices of coincide with the singularities of ;
- (b)
- an edge connects two vertices if the corresponding singularities are incident.
The incidence relation allows for associating with any good deformation so-called geometric graph [14] as a generalization of a bifurcation analysis [1]. Geometric graphs are an effective way of representing the nature of the singularity resolution of a one-parameter family of differential equations.
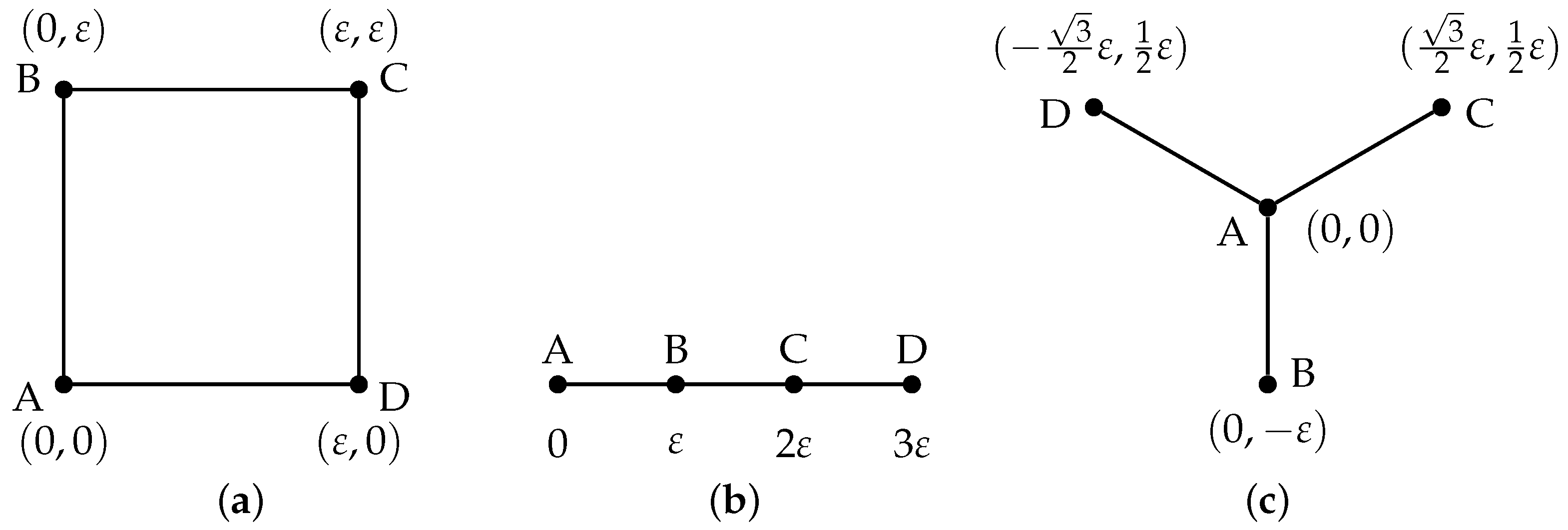
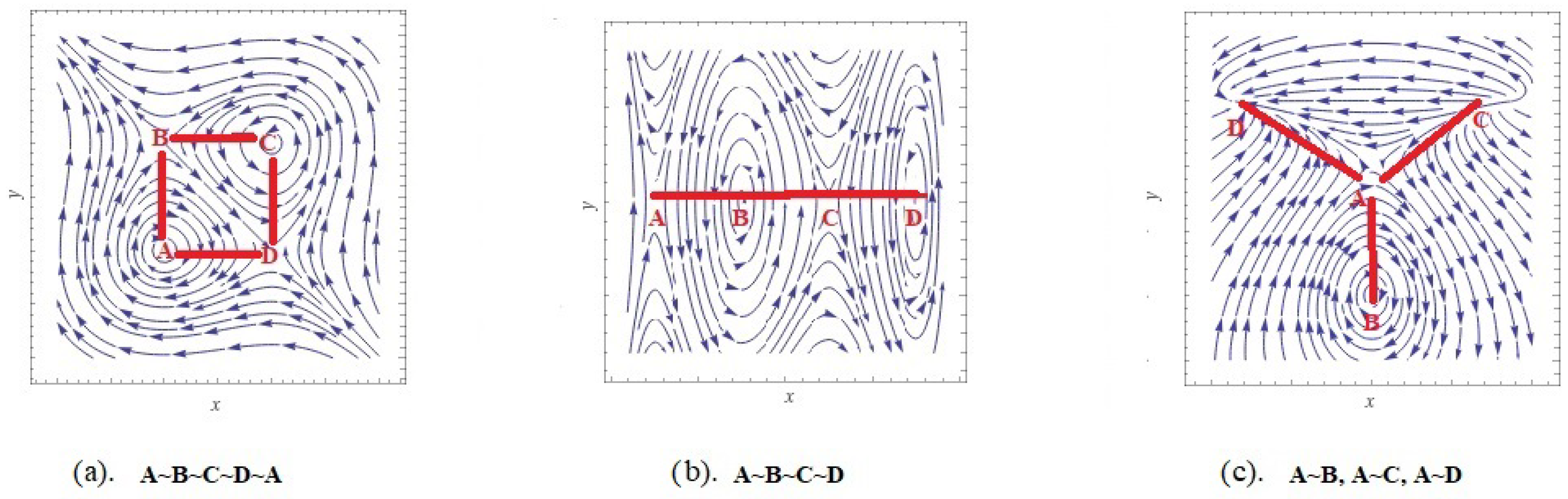
Example 2.
Consider three polynomial maps for which the origin is a singularity (of multiplicity four): (a) , (b) , and (c) . Take the good deformations: for (a), for (b), and for (c). The geometric graphs associated with (a), (b) and (c), respectively, are given in Figure 1. Different geometric structures of these graphs reflect different possible scenarios for decompositions/gluing of its singularities [10].
Case (a): Let us show the possibility of gluing singularities A with B, B with C, C with D, and D with A. (singularities are cyclically incidents):
However, by Theorem 3, the equilibrium A is not incident with C, and equilibrium B can not be glued with D (see Figure 2).
Case (b): Clearly, but D and A, A and C, B and D are not incident.
Case (c): Each vertex of the geometric graph in (c) is incident only with A, while they cannot be incident with each other (see Theorem 3). The small deformation for showed that A is incident to B in case (c) (see Figure 2).
Remark 1.
Let be a good deformation of P near c. Then:
- (a)
- two geometric graphs corresponding to different small positive values of ε are isomorphic;
- (b)
- (c)
- The idea behind the concept of a geometric graph can be traced back to the pioneering works of V. Arnold on the classification of singularities of gradient maps, where a deep connection between (i) the hierarchy of singularities related to their possible decomposition on the one hand, and (ii) Dynkin diagrams, on the other hand, was established (see [3,8,9,16,17,18]).
2.2. The Concept of the Multiplicity of the Roots
Before giving several Definitions of multiplicity, we will explore how they work for univariate polynomials, in contrast with the polynomial mappings.
Clearly, the multiplicity of a univariate polynomial can be defined equivalently in two completely different ways: algebraic (using factorization) and/or using differentiation:
One way to identify a multiplicity m of a root is to examine whether we can factorize p by the term but not by the term . This rule follows exactly the form of the Laurent expansion.
Another way is to compute derivatives for and clarify that .
Straightforward factorization is not a way to do it for general functions, multivariate polynomials, or polynomial maps. Thus, we need to take a closer look at the method we use for polynomials. Surprisingly, even for a multivariate polynomial map, one can define the generalization of factorization as follows.
If is a polynomial map and vector is the root of the assumed multiplicity m, one can not factorize by and obtain some vector function . Unlike the case with univariate polynomials, we cannot expect a cancellation in to differentiate the polynomial map. However, substituting into leads to problems in most cases, whether we guess correctly or not. For multiplicity of a given root for the polynomial map, there is a famous algebraic Definition 3 (see [3,19]).
Definition 3.
The complex vector is the root of the multiplicity m of the polynomial map if corresponding to P local algebra is m-dimensional.
Finally, consider topological mappings for which none of the above methods is simple for determining the multiplicities of zeros. In the latter case, one has to use the definition of the local mapping degree. In topology, the degree of a continuous mapping between two compact oriented manifolds of the same dimension is a number that represents how many times the manifold of domains wraps around the manifold of values under the mapping.
If F is a differentiable map of closed differentiable manifolds, then coincides mod 2 with the number of preimages of the regular value of the map F. In the case of oriented manifolds connected to is the sign of the Jacobian of F at the point x (Brauer degree).
The work [6] fetches a method that combines all the above-stated concepts, both algebraic factorization and analytic differentiation. Namely, they exploit a small topological deformations technique.
2.3. Factorization of Map
Lemma 1
(Factorization Lemma). Let be a polynomial map with . Then:
- (i)
- c is a multiple root of P if and only if there exist coordinates in and natural such thatwhere is a matrix with polynomial entries. Representation (1) is not unique
- (ii)
- For m given in (i), one has:
Definition 4.
The complex vector is called the linear type root of the polynomial map along direction if one can factorize (by Formula (1)) and .
2.4. Small Deformations of Zeros of Differential Mappings
Recall a regular deformation problem for isolated multiple root c of the polynomial map is a problem for which the perturbed polynomial map for all small non-zero values of has a couple of roots in the vicinity of multiple isolated roots of the unperturbed problem. The singular deformation problem is a problem for which the perturbed problem has essentially different roots from the unperturbed polynomial system.
Definition 5.
The complex vector is an isolated root of the multiplicity m of the polynomial map if there exists regular deformation with m simple roots all lie in a small neighborhood of .
We construct the so-called small roots deformations, that is, regular small deformations, , of the coefficients of the polynomial vector field P so that the zeroes of are simple to study, and they collapse to the root c of P when .
We utilize this tool to study the geometrical aspects of the resolution of degenerate singularities of multiplicity (number of preimages) two or more.
Here, it is necessary to start with precisely formulating the interrelated concepts. Splitting is a subpart of the resolution. The small deformation carries out a complete answer.
Definition 6.
The small deformation of a map will be called splitting near critical point , if there exists small and , such that all do not intersect a boundary for all ε small enough and is generic in .
Using splitting by Definition 6, one can override the notion of multiplicity even for non-isolated critical points of a mapping.
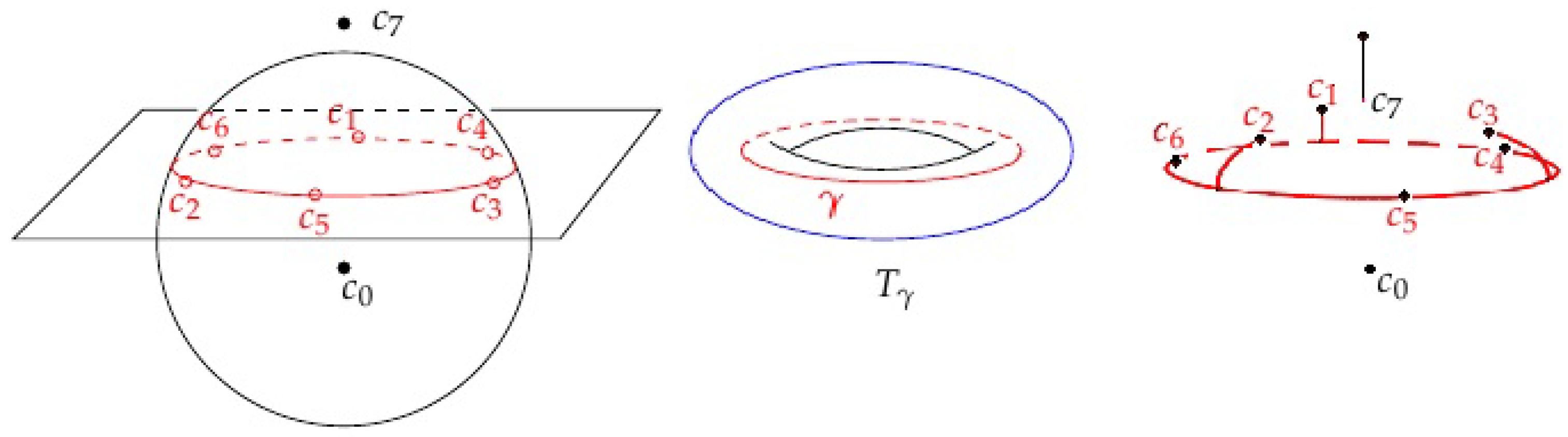
Consider the following Example of a mapping
To correctly define the “multiplicity” of any of those non-isolated zeroes, let us realize the splitting in (4) by the small deformation as (5):
All zeroes of are isolated: lie inside a torus in vicinity of the circle , while and the lies outside; see Figure 3 below. Any other disassembly of non-isolated zeroes at a circle remains the qualitative picture of splitting the same.
One readily verifies that the “multiplicity” of any zeroes of P lying in (4) is the same. It is logically correctly admitted that its multiplicity is equal to six.
2.5. Hadamard’s Type Lemma
In all forthcoming problems, we expect given mapping and their good deformation in the sense of Griffiths and Harris [2].
Question 1.
How can one check that a small deformation is at the same time a resolution of at least one critical point of F?
2.6. Starting Algorithm for Splitting Equilibrium
Let an origin be an isolated root of a multiplicity m of a polynomial map .
Define the desingularization of a point of a polynomial map by the good deformation as splitting this origin into the cluster of m regular points that lie in the vicinity of a source or assembling them back into the root when .
Recall that the Hadamard’s lemma [20] states that the Taylor series of a smooth enough function considering the direction of a real line near the origin has a representation, with the product of (for being the one of coordinate function) to smooth enough functions.
Lemma 2
(Hadamard’s type Lemma). A twice continuous differentiable map has a critical point at the origin if there exist coordinates , such that
with differentiable mappings , . Representation (12) is not unique. However, may be chosen depending on only.
Proof.
An origin is critical for F iff and . Therefore, the linear part of does not contain at least one variable, say . Conversely, from (12), and follow. □
With representation (12) for in hand, we can define its small deformation by the formula:
The proof that a small deformation in (7) is at the same time the resolution of the singularity at zero is trivial: Two zeroes of , the origin and belong to a small neighbor of an origin. Resolution of singularity is still to be achieved.
Formula (12) is also well established for the principal defining factorization. It should guide the approach to the problem of factorization in multidimensional cases. If F is represented by (12), then factorization F by is:
Remark 3.
Let be a germ of map with an isolated double zero at and let be its linear part at . Then, evidently, on an appropriate basis, the matrix A may be taken in its Jordan canonical form with exactly one zero eigenvalue Jordan block. Moreover, there exists a basis in such that .
2.7. Connection with the Grothendick Multidimensional Residual Theory
In this section, we consider methods for calculating Grothendieck residues [5], which can be extended to handle the dependence on small parameters and based on principal defining factorization (8).
We start with the limit formula for higher-order poles in Complex Analysis.
Let , where , are polynomials. Then, the residual of order m at is
From the very definition of Grothendieck Residue [5]: Let be an open neighborhood of the origin and let be n multivariate polynomials defined on . Suppose that P has the only one common isolated zero in and that is the origin .
Then, the Grothendieck residue (see [22]) is defined at the origin of O as the following integral for a small polydisc with an essential boundary :
Here, is any multivariate polynomial.
Now, let have an isolated zero of multiplicity m at O. Denote by a good deformation of P. This means: all m zeroes , of a deformation are simple and lie at the vicinity of the origin O. Then, due to Continuity Principle, see [2,22].
is the Jacobian matrix of .
Remark 4.
Similarly to the scalar case, given a polynomial and a polynomial map with an isolated simple singularity , one can define the Grothendieck residue using the Bochner–Martinelli integral (10) explicitly. Namely,
If c is a multiple root of P, then direct computations of the Grothendieck residue may be very complicated, and good deformation techniques can help. To be more specific, if is a good deformation of P near c with
then there exists a finite limit denoted by that coincides with the Grothendieck residue (cf. [6,22]).
The effectiveness of Formula (11) essentially depends on the complexity of c. In what follows, we will show that (11) is usable for the Grothendieck residue at a double point which is nicely compatible with (9).
This way, we will extend (9) to the multidimensional roots after good deformation forming a cluster with the lattice structure of simple roots. Namely:
Definition 7.
Suppose admits principal defining factorization as
where is multi-index, and is a polynomial map with . Then, P is called the lattice singularity at the origin.
Theorem 1.
Suppose, the point c is a lattice singularity of a polynomial map and let be a polynomial map described as principal defining factorization of in Definition 7. Then,
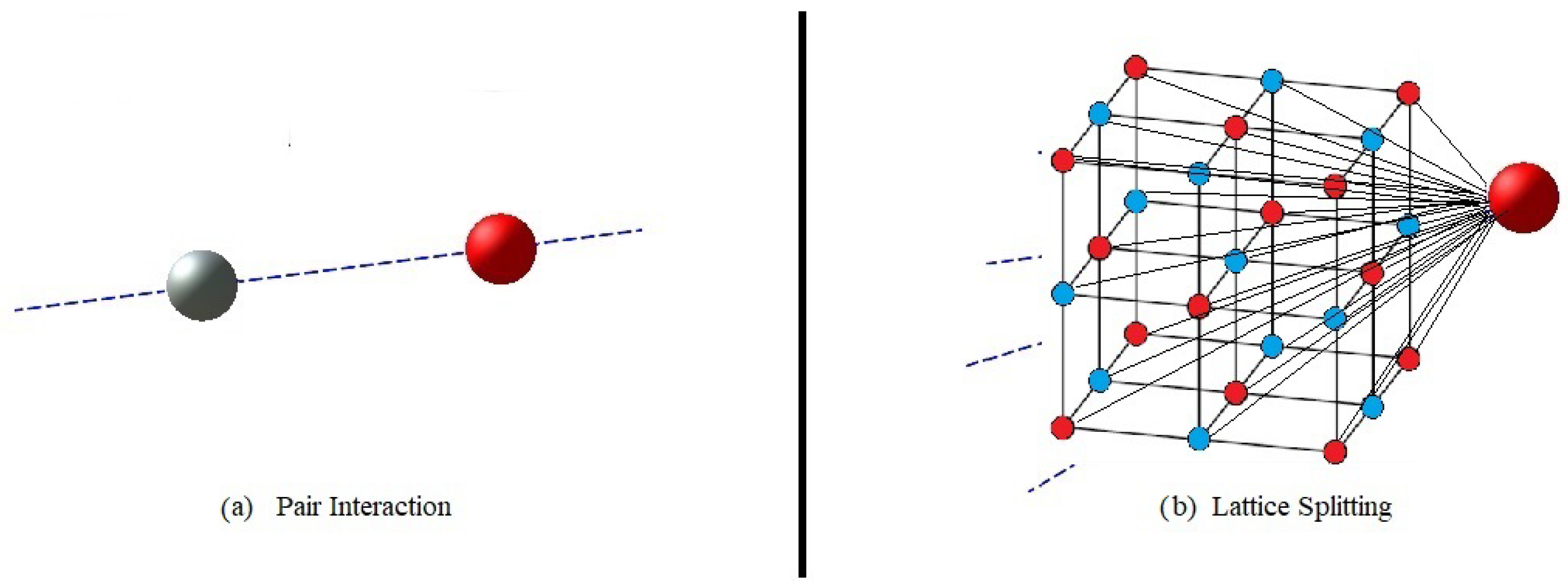
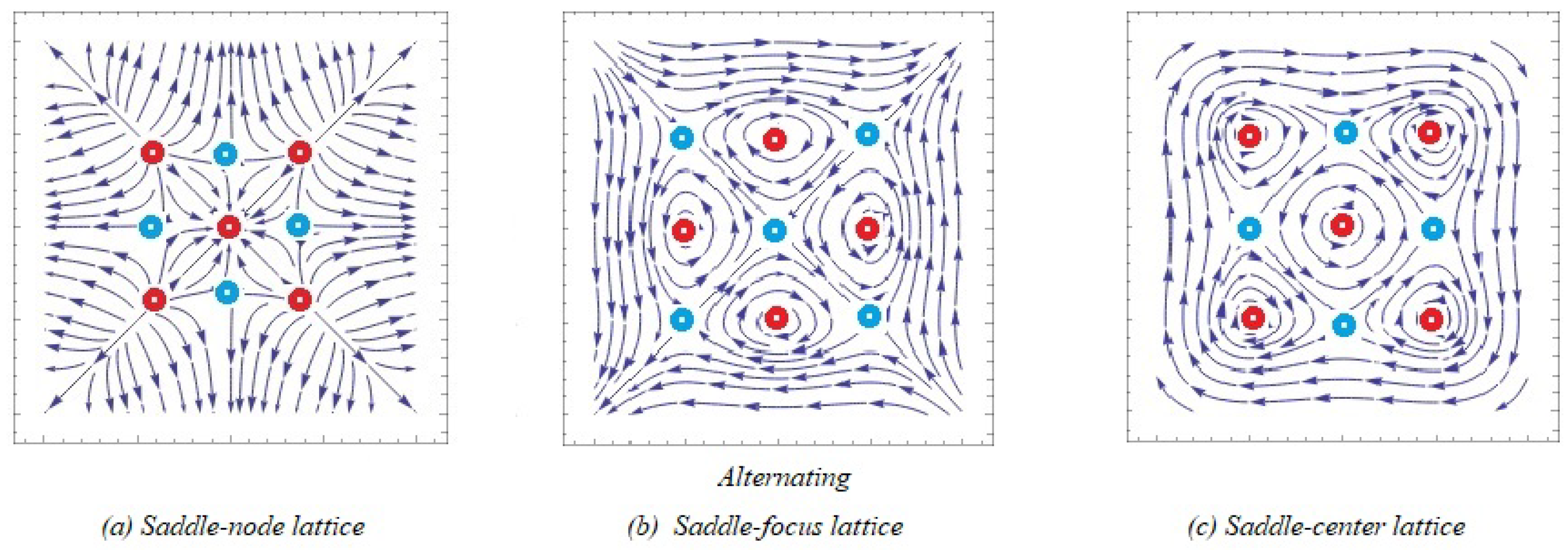
The explicit form of the Grothendieck residue Formula (13) applies only to a lattice singularity. This formula indicates explicitly the alternation of signs in the Jacobian determinants in the lattice structure, as shown in Figure 4 and Figure 5 by red and blue colour.
The general situation will be discussed in the next section.
3. Main Asymptotic Rules during Desingularization
In this section, we will adhere to the following conventions:
Given polynomial map with an isolated zero c of finite multiplicity , denote its good deformation by . Clearly, the cluster of m regular isolated zeroes of lie in the small vicinity of . The following Theorem [23] characterized the topological properties of the Grothendieck residual:
Theorem 2.
Suppose that the point c is an isolated multiple () zero of a polynomial map and let its good deformation be a polynomial map with exactly m zeroes in a ε-neighborhood of c. Then,
It is important to emphasize that the limit in (14) exists and is always finite.
Remark 5.
The existence of a finite limit in (14) is a necessary condition (an asymptotic law for a bifurcation) for desingularization using good deformations.
Fix polynomial and denote the determinant of the Jacobian matrix by . Evidently, for all when . Then, the following asymptotic formula of as the Laurent series expansion takes place:
when . Define
Then, the condition for the existence of a finite limit in (14) is equivalent to the fact that the function is a complex analytic in a small neighborhood of :
We are now formulating the asymptotic rules for double zero of the polynomial vector field bifurcation.
Asymptotic Rules for Spitting Double Zero of a Polynomial Map
Lemma 3.
Combining the results of the previous Lemma and Remark 3 with matching the fact that Grothendieck residue (11) exists and is finite, we obtain the following law of bifurcation from double zero in terms of (15):
Theorem 3.
Let the point be the double zero of a polynomial map . A saddle-node bifurcation from a double singularity (called in physics pair interactions) is possible only if the following asymptotic laws are fulfilled:
- Any good deformation splits this double zero into two regular roots , of , all lying in the vicinity of c;
- There is a unique eigenvector of the Jacobi matrix with zero eigenvalue, ;
- The local dynamics of depend on a size of the unique zero eigenvalue Jordan block in Jacobi matrix linearization near ;
- Splitting the double zero c of P into two regular points by use of any good deformation can be achieved (asymptotically) only along a direction of . (In physics, is usually called the dipole polarization axis);
- A critical double point is always type in Arnold–Dynkin classification (see [16]);
- The main terms of the asymptotic by calculation determinants of the Jacobian matrices at zeroes and must have the same absolute value and opposite sign. Namely, a critical double point can be split into two simple points around the critical point if and only if
The argument for Theorem 3’s proof based on Lemma 3 and Remark 3 (see [6]).
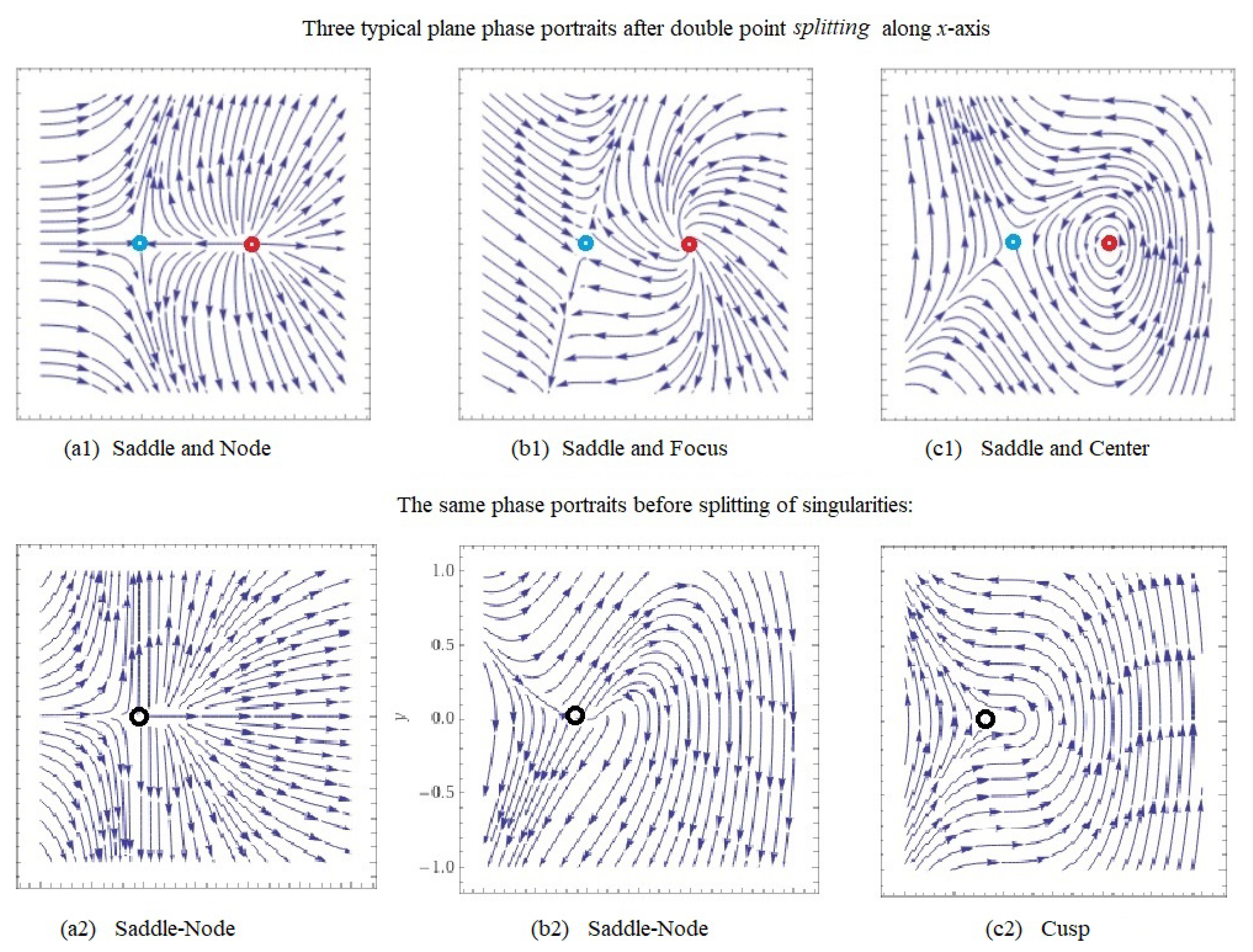
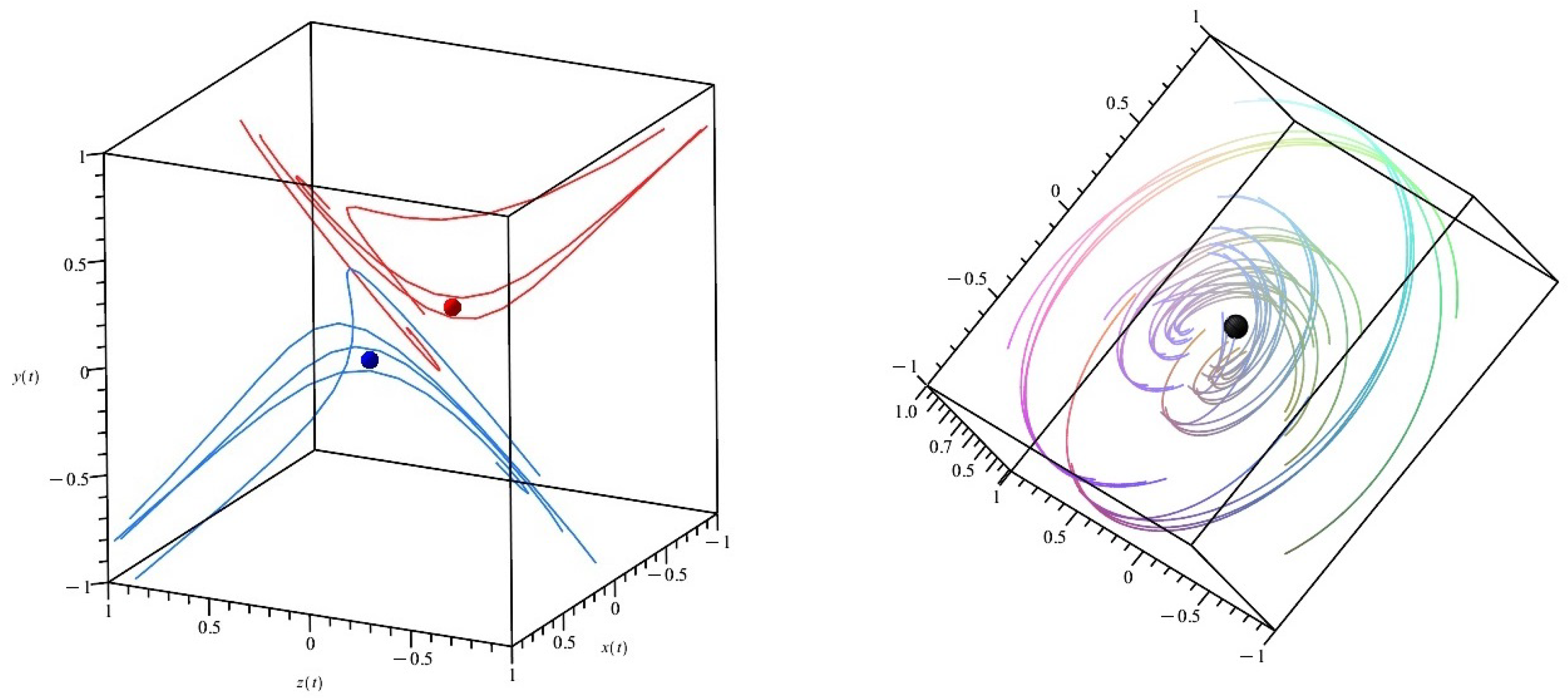
The bifurcations split the double zero of the polynomial map into two simple ones, often called Saddle-Nodes. However, even starting from dimension , one can also recognize Saddle-Focus and Saddle-Center bifurcations (see Figure 6). In 3D, to the above-stated plane cases of pair interactions, we should add various issues of Saddle–Helix bifurcations (see Figure 7).
The splitting of double singularities is relatively simple and obeys the asymptotic laws listed in Theorem 3. Illustrations of double points interactions on the plane and in the space are shown in Figure 6 and Figure 7. In contrast, generalizations already to triple or quadruple features have a more complex scenario. We plan to dwell on them in more detail in subsequent papers.
4. Fan Singularity of the Homogeneous Map
In this section, we show that the small deformation of a k-linear mapping near the origin can be constructed knowing the set of its fixed points. Namely, if is homogeneous map, is always a small deformation of P.
Problem 1.
Given the sequence of complex vectors and associated with each n complex numbers , fix an integer k. Then, determine necessary and sufficient conditions on these vectors and numbers such that they are the eigenvectors and eigenvalues of a set of quadratic Jacobian matrices . They are constructed by k linear homogeneous polynomial map at their fixed points set .
4.1. Construction of Good Deformation for the Fan Singularity
For our purposes, we need to use Kronecker’s powers of vectors.
Given non-zero vector , define Kronecker’s tensor k-power of a vector V as . Recall the symmetric tensor product of two vectors and represented as follows:
The Kronecker power puts V onto itself k-times as symmetric Kronecker products. Denote the dimension of the symmetric Kronecker k-power space by . Where is a standard notion for a binomial coefficient. We start to answer the Problem 1 with the following sentence: Sets of fixed points uniquely determine the homogeneous multilinear generic mapping.
More accurately, using Bêzout theorem (cf. [24]), the generic k-linear map in has non proportional fixed points for . Then,
Theorem 4.
If set S of vectors forms a basis in , then there exists a unique k-homogeneous mapping such that .
Proof.
Compare dimension with the maximum number of isolated fixed points in .
By Bézout’s Theorem (cf. [24]), there exists no more than fixed points of or infinitely many. If is generic, then there exists exactly fixed points.
If , then . For , . Therefore, in Theorem 4, it is enough to choose fixed points in in order to define the uniquely as a solution of system .
The system of m equation , is a linear system of equations with respect to the coefficients of in . By the assumption of Theorem, , and the matrix of this linear system is not singular. Therefore, is uniquely defined as a solution of . □
Example 3.
Choose six points in
Remark 6.
Theorem 4 in two-dimensional space may be formulated much easier. See Section 4.2.
In contrast with Theorem 4, already for three-dimensional quadratic homogeneous systems, the simple observation shows that the fixed points cannot take arbitrary values. Namely, there exist certain universal relations (syzygy) among the following as a consequence of the Euler–Jacobi Formula.
Undoubtedly, two-dimensional results are much simpler and more intuitive than in the general setting. For example, linear factors can factorize any homogeneous polynomial mapping over . Moreover, any k-homogeneous nontrivial polynomial in 2D may be represented using a polynomial with single variable :
4.2. Results in 2D
Our reasoning [6] for how to find a canonical form of the k-homogeneous map is based on:
Theorem 5.
Let S be set of pairwise non-collinear planar vectors
Then, there exists a unique k-homogeneous polynomial map such that S coincides with a set of their non-proportional fixed points.
Proof.
In order to define , it is enough to find its coefficients for all :
The following linear system is responsible for a fixed point finding:
Here, A and B are respectively and matrices presenting explicitly:
A is a slightly modified Vandermonde matrix.
By the assumption of Theorem 5, all points in S are pairwise non-collinear, . □
To illustrate Theorem 5, we use the following convention: any point and any k-homogeneous polynomial map over reals in 2D can be represented in the complex form as , meaning that
Example 4.
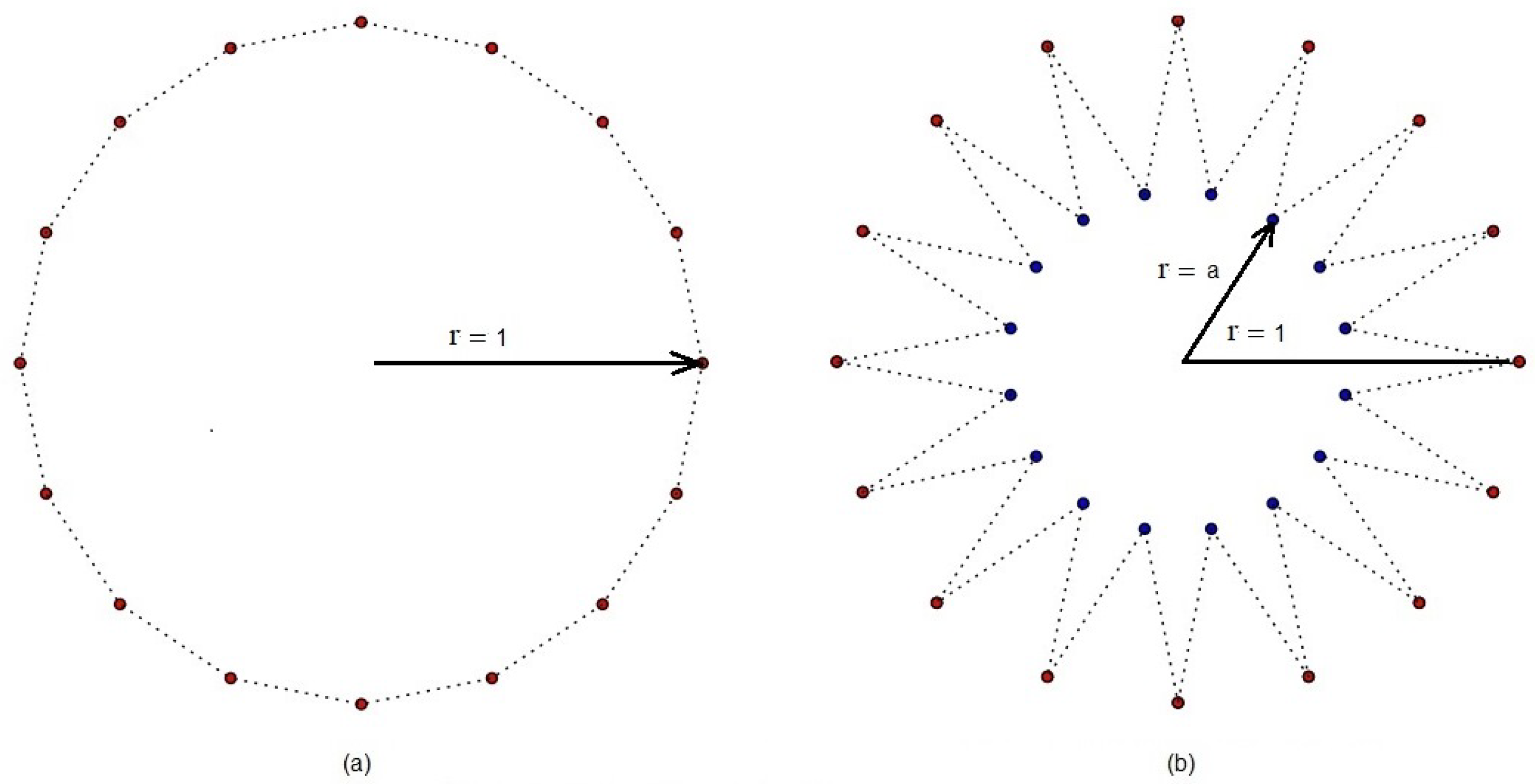
Given a set of points, lie at the vertices of the equilateral polygon (see Figure 9a). Then, the homogeneous polynomial mapping of order k, such that a set of its fixed points coincide with P, acquires [25] an elementary correspondence form:
In particular,
The proof that all fixed points of the mapping lie at the vertices of a regular k-gon follows easily from the correspondence Formula (26). Thus, all fixed points fulfill the equation:
Using the Euler form for the complex numbers, we obtain , and
Example 5.
Given a set of points: , and . P, Q lie at the vertices of equilateral -star as it is shown schematically in Figure 9b). Then, there exists a homogeneous polynomial mapping of order k, such that the set of its fixed points coincide with P and Q. acquires the following correspondence form:
In particular,
The proof that all fixed points of the mapping lie at the vertices of a regular -star follows quickly from the correspondence Formula (26). From , using the polar coordinates , it follows that
Clearly, and fulfill (28).
Remark 7.
Comparing the representation (23) of the general k-linear mapping, two extreme cases and can be noted. It is worth mentioning that is a λ-potent, and represents a diagonalizable map. The first displays the map that the eigenvalue preserves at all its fixed points, and the last one is an eigenvector that preserves mapping at all points by the coincidental similarity. It is clear that the combination of these two edge cases while preserving all the spectral properties of leads to the unambiguousness of their definition, that is, in the specificity, if and only if .
Recall that the canonical form constructed in Theorem 5 used the fixed points of a multilinear mapping. Acquiring an invariant of the Jacobian matrix is the right choice for a suitable canonical form description.
5. Conclusions
- The bifurcation associated with the resolution of multiple singularities has specific features, the key to understanding related to the asymptotic Grothendieck local residue conservation law.
- Suppose the singularities of a multivariant polynomial mapping are identical to the singularities of a locally holomorphic function of one variable. In that case, such singularities can be splitting along a line and must obey the alternating accordion rule, where the sign of the Jacobian determinants alternate.
- The lattice singularities must have staggered features whose nearby nodes of the geometric graph are incidental;
- Calculation of Grothendieck residue at points with lattice singularity has a simple form of generalized residue from complex analysis;
- Bifurcations of singularities of the homogeneous vector field may be constructed along rays with fixed points.
Author Contributions
Conceptualization, Y.K.; computation and graphical design, correcting, I.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research and APC were not funded by any foundation.
Data Availability Statement
No datasets were generated or analyzed during the current research.
Acknowledgments
We thank the anonymous referees for numerous and informative remarks, which made it possible to significantly improve the quality of the results obtained in this work. We are grateful to Zalman Balanov for many years of creative collaboration and valuable discussions on the topic of this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chow, S.-N.; Jack, K.; Hale, J.K. Methods of Bifurcation Theory; Springer: Berlin/Heidelberg, Germany, 1982; 525p. [Google Scholar]
- Griffiths, P.; Harris, J. Principles of Algebraic Geometry; Wiley-Interscience: New York, NY, USA, 1978. [Google Scholar]
- Arnold, V.I.; Gusein-Zade, S.M.; Varchenko, A.N. Singularities of Differentiable Map; Modern Birkhauser Classics: Switzerland, Basel, 2012; Volume 1. [Google Scholar]
- Encinas, S.; Villamayor, O. Good points and constructive resolution of singluarities. Acta Math. 1998, 181, 109–158. [Google Scholar] [CrossRef]
- Grothendieck, A.; Dieudonné, J. Elements de géométrie algébrique. Inst. Hautes Études Sci. Publ. Math. 1967, 8, 24–32. [Google Scholar]
- Balanov, Z.; Krasnov, Y. On good deformations of Am-singularities. Discret. Cont. Dyn. Syst. Ser. S 2019, 12, 1851–1866. [Google Scholar]
- Baum, P.F.; Bott, R. Singularities of holomorphic foliations. J. Differ. Geom. 1972, 7, 279–342. [Google Scholar] [CrossRef]
- Arnol’d, V.I.; Goryunov, L.V.; Vasiliev, V. Singularities I. Local and global theory. In Current Problems in Mathematics. Fundamental Directions; Itogi Nauki i Tekhniki, Akad. Nauk SSSR, Vsesoyuz. Inst. Nauchn. i Tekhn. Inform.: Moscow, Russia, 1988; Volume 6, pp. 5–257. [Google Scholar]
- Arnol’d, G.V.; Lyashko, O.; Vasiliev, V. Singularities II. Classification and Applications. In Encyclopedia of Mathematics Sciences; Russian Edition 1989; Springer: Berlin/Heidelberg, Germany, 1992; Volume 39. [Google Scholar]
- Artes, J.; Llibre, J.; Schlomiuk, D.; Vulpe, N. Global configurations of singularities for quadratic differential systems with exactly three finite singularities of total multiplicity four. Electron. J. Qual. Theory Differ. Equ. 2015, 49, 1–60. [Google Scholar] [CrossRef]
- Atiyah, M.F. Resolution of Singularities and Division of Distributions. Commun. Pure Appl. Math. 1970, 23, 145–150. [Google Scholar] [CrossRef]
- Hironaka, H. Resolution of Singularities of an Algebraic Variety Over a Field of Characteristic Zero: I. Ann. Math. Second. Ser. 1964, 79, 109–203. [Google Scholar] [CrossRef]
- Whitney, H. On singularities of mappings of euclidean spaces. I. Mappings of the plane into the plane. Ann. Math. 1955, 62, 374–410. [Google Scholar] [CrossRef]
- Gross, J.; Yellen, J. Graph Theory and Its Applications; CRC Press: Boca Raton, MA, USA, 1999. [Google Scholar]
- Bernstein, D.; Kushnirenko, A.; Khovanskii, A. Newton polytopes. Usp. Math. Nauk. 1976, 31, 201–202. [Google Scholar]
- Arnold, V. Normal forms for functions near degenerate critical points, the Weyl groups of Ak, Dk, Ek and Lagrangian singularities. Funktsional’nyi Anal. i Ego Prilozheniya 1972, 6, 3–25. [Google Scholar] [CrossRef]
- Arnold, V.I. Singularities, bifurcations, and catastrophes. Usp. Fiz. Nauk. 1983, 141, 569–590. [Google Scholar] [CrossRef]
- Arnold, V.; Goryunov, V.; Lyashko, O.; Vasiliev, V. Singularity Theory II: Classification and Applications. In Encyclopedia of Mathematics Sciences; Russian Edition 1988; Springer: Berlin/Heidelberg, Germany, 1992; Volume 39. [Google Scholar]
- Eisenbud, D.; Levine, H. An algebraic formula for the degree of a map germ. Ann. Math. 1977, 106, 19–44. [Google Scholar] [CrossRef]
- Nestruev, J. Smooth Manifolds and Observables, 2nd ed.; Graduate Texts in Mathematics, 220; Springer: Cham, Switzerland, 2020; 433p. [Google Scholar]
- Rabinowitz, I. Step-by-step resolution of singularities and studying interactions between them. J. Math. Sci. accepted.
- Soares, M.G. Lectures on point residues. Monogr. Inst. Math. Relat. Sci. 2002, 28, 108. [Google Scholar]
- Aizenberg, L.A. Application of multidimensional logarithmic residue to represent the difference between the number of integer points in a domain and its volume in the form of an integral. Dokl. Akad. Nauk SSSR 1983, 270, 521–523. [Google Scholar]
- Kushnirenko, A.G. The Newton polyhedron and the number of solutions of a system of k equations in k unknowns. Uspekni Math. Nauk. 1975, 9, 266–267. [Google Scholar]
- Krasnov, Y.; Koylyshov, U.K. Symmetries in Phase Portrait. Symmetry 2020, 12, 1123. [Google Scholar] [CrossRef]
Figure 1.
Geometric graphs for resolution singularities in Example 2, cases (a–c).

Figure 2.
Schema of incident vertices on a geometric graph in Example 2 cases (a–c).

Figure 3.
The critical points of (3) posted on the circle (painted red) on the left and simple points of (5) on the right.

Figure 4.
Linear and lattice splitting/assembling of singularities.

Figure 5.
Lattice splitting/assembling of singularities in 2D.

Figure 6.
Splitting/assembling of two singularities in 2D (pair interaction in 2D).

Figure 7.
Spiral splitting/assembling of two singularities in 3D (Pair Interaction in 3D).

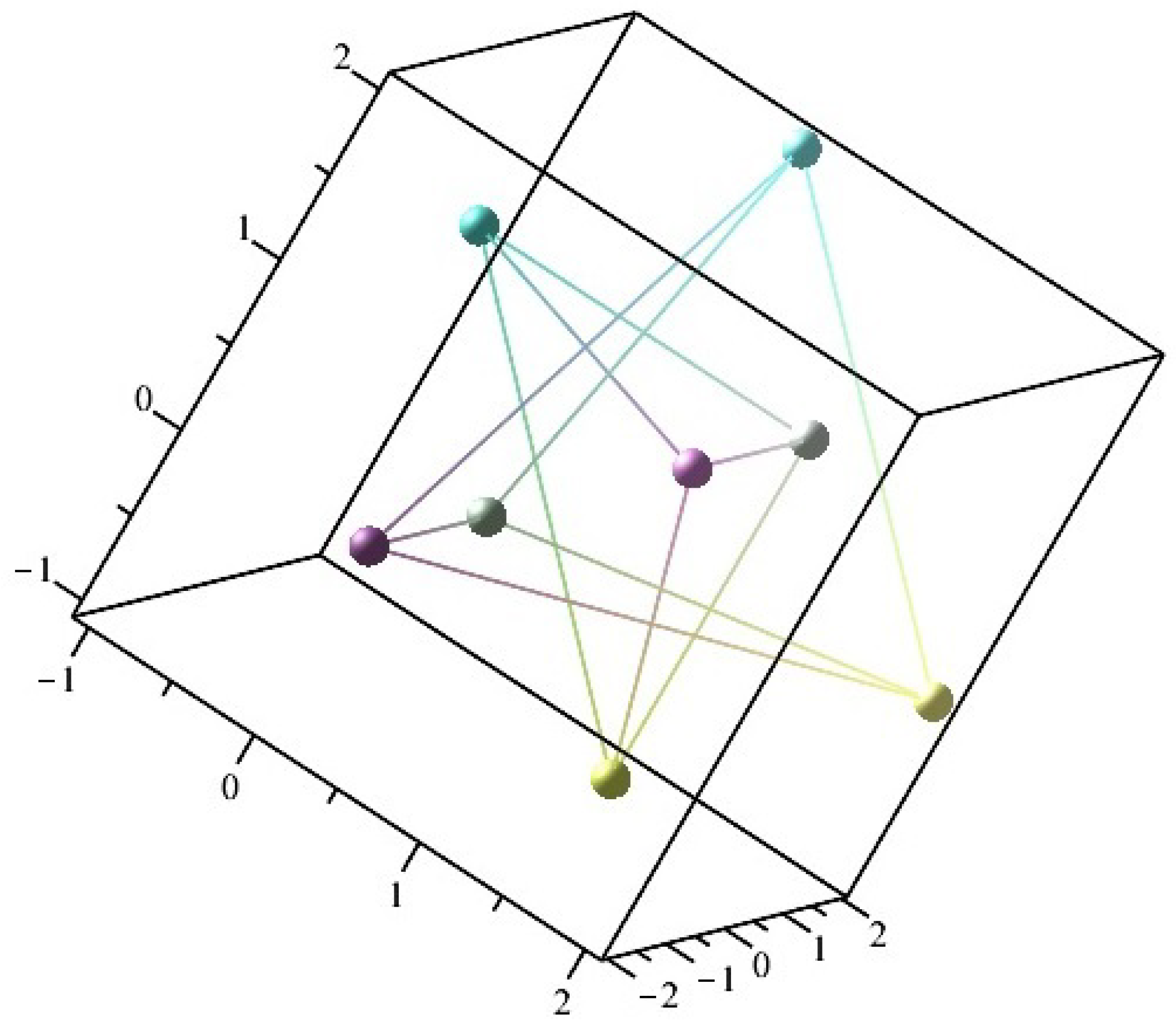
Figure 8.
Fixed points located at the corners of two coaxial tetrahedrons.

Figure 9.
Fixed points location at the corners of m-gon (a) and on m-star (b).

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Krasnov, Y.; Rabinowitz, I. Asymptotic Rules of Equilibrium Desingularization. Symmetry 2022, 14, 2186. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102186
AMA Style
Krasnov Y, Rabinowitz I. Asymptotic Rules of Equilibrium Desingularization. Symmetry. 2022; 14(10):2186. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102186
Chicago/Turabian StyleKrasnov, Yakov, and Iris Rabinowitz. 2022. "Asymptotic Rules of Equilibrium Desingularization" Symmetry 14, no. 10: 2186. https://0-doi-org.brum.beds.ac.uk/10.3390/sym14102186
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.