Optimizing Laboratory Investigations of Saline Intrusion by Incorporating Machine Learning Techniques

 ,
, 
 , ,
, ,
Abstract
:
1. Introduction
2. Laboratory Setup and Investigated Aquifers
3. Methodology
3.1. Image Pre-Processing
3.2. Porous Medium Classification
3.2.1. Input Variable Selection
3.2.2. Evaluation of Various Machine Learning Algorithms
3.3. Generating Saltwater Concentration Fields
3.4. Optimum Combination of Predicted Saltwater Concentration Fields
4. Results
5. Conclusions
- The method outperformed pixel-wise regression in most cases. It perfectly recreated the pure freshwater and saltwater zones of the experimental SW intrusion data. The impact of air bubbles was limited. Since the regression was not performed on a pixel wise level, there was no need for perfect overlap between the test and calibration images, thus small movements of the camera introduced minimal error.
- The approach was implemented successfully for the wedge-shaped intrusion and the irregularly shaped saltwater plume alike, proving its resilience and applicability on diverse setups of saline intrusion. The basic principles of the methodology may be extensible to laboratory investigations of phenomena beyond this specific research field, such as contaminant transport of dense or non-aqueous phase liquids.
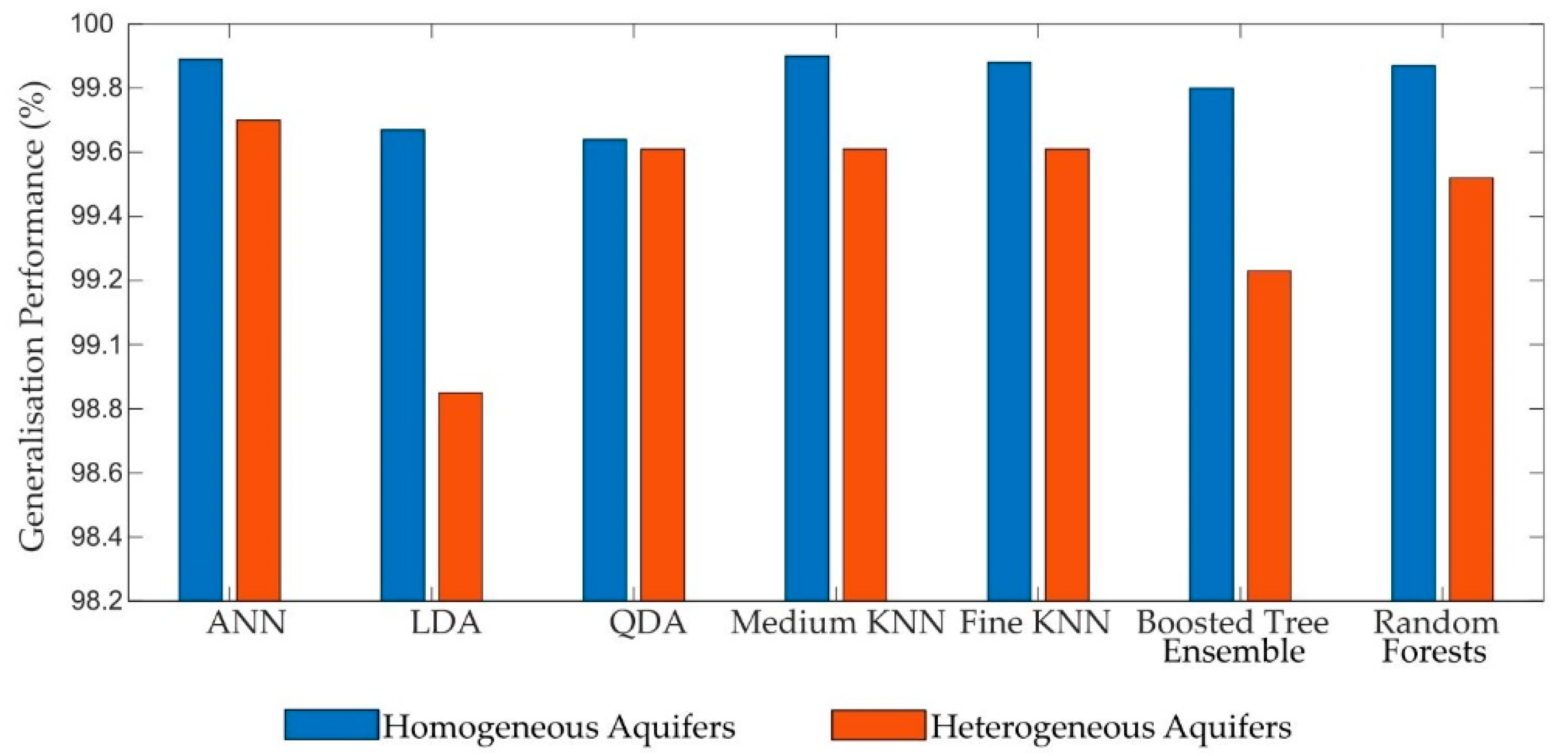
- The results confirmed that a minimum of one homogeneous aquifer per utilized bead size generated sufficient training data for the implementation of the method. It was established that the procedure can be recreated by substituting the ANNs with different machine learning algorithms. All the algorithms used were well established and their architecture was derived through trial and error. The application of more complex learning procedures, such as deep learning, was not necessary. The aforementioned facts demonstrate that the method’s implementation is straightforward and does not require advanced machine learning skills, making it a user friendly scientific tool.
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Deriving the Optimum Combination of Predicted Saltwater Concentrations


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Run | Error | x1 | x2 | x3 | x4 | x5 |
|---|---|---|---|---|---|---|
| 1 | 5.89465 | 16 | 16 | 21 | 36 | 11 |
| 2 | 5.9999 | 18 | 12 | 20 | 33 | 17 |
| 3 | 5.8323 | 16 | 17 | 18 | 37 | 12 |
| 4 | 6.14206 | 20 | 3 | 29 | 34 | 14 |
| 5 | 5.8681 | 17 | 7 | 30 | 43 | 3 |
| 6 | 6.3134 | 12 | 12 | 28 | 40 | 8 |
| 7 | 5.9331 | 18 | 13 | 19 | 36 | 14 |
| 8 | 5.99247 | 18 | 10 | 22 | 41 | 9 |
References
- Neumann, B.; Vafeidis, A.T.; Zimmermann, J.; Nicholls, R.J. Future Coastal Population Growth and Exposure to Sea-Level Rise and Coastal Flooding—A Global Assessment. PLoS ONE 2015, 10, e0118571. [Google Scholar] [CrossRef] [PubMed]
- Voss, C.; Souza, W.R. Variable Density Flow and Solute Transport Simulation of Regional Aquifers Containing a Narrow Freshwater-Saltwater Transition Zone. Water Resour. Res. 1987, 23, 1851–1866. [Google Scholar] [CrossRef]
- Bear, J. Dynamics of Fluids in Porous Media; American Elsevier Publishing Company: New York, NY, USA, 1988. [Google Scholar]
- Herbert, A.W.; Jackson, C.P.; Lever, D.A. Coupled Groundwater Flow and Solute Transport with Fluid Density Strongly Dependent Upon Concentration. Water Resour. Res. 1988, 24, 1781–1795. [Google Scholar] [CrossRef]
- Stoeckl, L.; Houben, G.J.; Dose, E.J. Experiments and Modeling of Flow Processes in Freshwater Lenses in Layered Island Aquifers: Analysis of Age Stratification, Travel Times and Interface Propagation. J. Hydrol. 2015, 529, 159–168. [Google Scholar] [CrossRef]
- Strack, O.D.L.; Stoeckl, L.; Damm, K.; Houben, G.; Ausk, B.K.; de Lange, W.J. Reduction of Saltwater Intrusion by Modifying Hydraulic Conductivity. Water Resour. Res. 2016, 52, 6978–6988. [Google Scholar] [CrossRef] [Green Version]
- Werner, A.D.; Kawachi, A.; Laattoe, T. Plausibility of Freshwater Lenses Adjacent to Gaining Rivers: Validation by Laboratory Experimentation. Water Resour. Res. 2016, 52, 8487–8499. [Google Scholar] [CrossRef]
- Noorabadi, S.; Nazemi, A.H.; Sadraddini, A.A.; Delirhasannia, R. Laboratory Investigation of Water Extraction Effects on Saltwater Wedge Displacement. Glob. J. Environ. Sci. Manag. 2017, 1, 21–32. [Google Scholar]
- Noorabadi, S.; Sadraddini, A.A.; Nazemi, A.H.; Delirhasannia, R. Laboratory and Numerical Investigation of Saltwater Intrusion into Aquifers. J. Mater. Environ. Sci. 2017, 8, 4273–4283. [Google Scholar] [CrossRef]
- Luyun, R.; Momii, K.; Nakagawa, K. Effects of Recharge Wells and Flow Barriers on Seawater Intrusion. Groundwater 2011, 49, 239–249. [Google Scholar] [CrossRef]
- Abdelgawad, A.M.; Abdoulhalik, A.; Ahmed, A.A.; Moutari, S.; Hamill, G. Transient Investigation of the Critical Abstraction Rates in Coastal Aquifers: Numerical and Experimental Study. Water Resour. Manag. 2018, 32, 3563–3577. [Google Scholar] [CrossRef] [Green Version]
- Takahashi, M.; Momii, K.; Luyun, R. Laboratory Scale Investigation of Dispersion Effects on Saltwater Movement Due to Cutoff Wall Installation. E3S Web Conf. 2018, 54, 6. [Google Scholar] [CrossRef]
- Abdoulhalik, A.; Ahmed, A.A. Transience of Seawater Intrusion and Retreat in Response to Incremental Water-Level Variations. Hydrol. Process. 2018, 32, 2721–2733. [Google Scholar] [CrossRef]
- Liu, Y.; Mao, X.; Chen, J.; Barry, D.A. Influence of a Coarse Interlayer on Seawater Intrusion and Contaminant Migration in Coastal Aquifers. Hydrol. Process. 2014, 28, 5162–5175. [Google Scholar] [CrossRef]
- Shi, W.; Lu, C.; Ye, Y.; Wu, J.; Li, L.; Luo, J. Assessment of the Impact of Sea-Level Rise on Steady-State Seawater Intrusion in a Layered Coastal Aquifer. J. Hydrol. 2018, 563, 851–862. [Google Scholar] [CrossRef]
- Goswami, R.R.; Clement, T.P. Laboratory-Scale Investigation of Saltwater Intrusion Dynamics. Water Resour. Res. 2007, 43. [Google Scholar] [CrossRef]
- Mehdizadeh, S.S.; Werner, A.D.; Vafaie, F.; Badaruddin, S. Vertical Leakage in Sharp-Interface Seawater Intrusion Models of Layered Coastal Aquifers. J. Hydrol. 2014, 519, 1097–1107. [Google Scholar] [CrossRef]
- Stoeckl, L.; Houben, G. Flow Dynamics and Age Stratification of Freshwater Lenses: Experiments and Modeling. J. Hydrol. 2012, 458–459, 9–15. [Google Scholar]
- Dose, E.J.; Stoeckl, L.; Houben, G.J.; Vacher, H.L.; Vassolo, S.; Dietrich, J.; Himmelsbach, T. Experiments and Modeling of Freshwater Lenses in Layered Aquifers: Steady State Interface Geometry. J. Hydrol. 2014, 509, 621–630. [Google Scholar] [CrossRef]
- Houben, G.J.; Stoeckl, L.; Mariner, K.E.; Choudhury, A.S. The Influence of Heterogeneity on Coastal Groundwater Flow—Physical and Numerical Modeling of Fringing Reefs, Dykes and Structured Conductivity Fields. Adv. Water Resour. 2018, 113, 155–166. [Google Scholar] [CrossRef]
- Abarca, E.; Clement, T.P. A Novel Approach for Characterizing the Mixing Zone of a Saltwater Wedge. Geophys. Res. Lett. 2009, 36. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.; Chen, Y.; Zhang, C.; Luo, J. Steady-State Freshwater-Seawater Mixing Zone in Stratified Coastal Aquifers. J. Hydrol. 2013, 505, 24–34. [Google Scholar] [CrossRef]
- Li, F.; Chen, X.; Liu, C.; Lian, Y.; He, L. Laboratory Tests and Numerical Simulations on the Impact of Subsurface Barriers to Saltwater Intrusion. Nat. Hazards 2018, 91, 1223–1235. [Google Scholar] [CrossRef]
- Armanuos, A.M.; Ibrahim, M.G.; Mahmod, W.E.; Takemura, J.; Yoshimura, C. Analysing the Combined Effect of Barrier Wall and Freshwater Injection Countermeasures on Controlling Saltwater Intrusion in Unconfined Coastal Aquifer Systems. Water Resour. Manag. 2019, 33, 1265–1280. [Google Scholar] [CrossRef]
- Schincariol, R.A.; Schwartz, F.W. An Experimental Investigation of Variable Density Flow and Mixing in Homogeneous and Heterogeneous Media. Water Resour. Res. 1990, 26, 2317–2329. [Google Scholar] [CrossRef]
- Zhang, Q.; Volker, R.E.; Lockington, D.A. Influence of Seaward Boundary Condition on Contaminant Transport in Unconfined Coastal Aquifers. J. Contam. Hydrol. 2001, 49, 201–215. [Google Scholar] [CrossRef]
- Zhang, Q.; Volker, R.E.; Lockington, D.A. Experimental Investigation of Contaminant Transport in Coastal Groundwater. Adv. Environ. Res. 2002, 6, 229–237. [Google Scholar] [CrossRef]
- Konz, M.; Ackerer, P.; Meier, E.; Huggenberger, P.; Zechner, E.; Gechter, D. On the Measurement of Solute Concentrations in 2-D Flow Tank Experiments. Hydrol. Earth Syst. Sci. 2008, 12, 727–738. [Google Scholar] [CrossRef] [Green Version]
- Konz, M.; Younes, A.; Ackerer, P.; Fahs, M.; Huggenberger, P.; Zechner, E. Variable-Density Flow in Heterogeneous Porous Media—Laboratory Experiments and Numerical Simulations. J. Contam. Hydrol. 2009, 108, 168–175. [Google Scholar] [CrossRef]
- Konz, M.; Ackerer, P.; Younes, A.; Huggenberger, P.; Zechner, E. Two-Dimensional Stable-Layered Laboratory-Scale Experiments for Testing Density-Coupled Flow Models. Water Resour. Res. 2009, 45, 2. [Google Scholar] [CrossRef] [Green Version]
- Liu, S.; Tao, A.; Dai, C.; Tan, B.; Shen, H.; Zhong, G.; Lou, S.; Chalov, S.; Chalov, R. Experimental Study of Tidal Effects on Coastal Groundwater and Pollutant Migration. Water Air Soil Pollut. 2017, 228, 163. [Google Scholar] [CrossRef]
- Kuan, W.K.; Jin, G.; Xin, P.; Robinson, C.; Gibbes, B.; Li, L. Tidal Influence on Seawater Intrusion in Unconfined Coastal Aquifers. Water Resour. Res. 2012, 48. [Google Scholar] [CrossRef] [Green Version]
- Konz, M.; Ackerer, P.; Huggenberger, P.; Veit, C. Comparison of Light Transmission and Reflection Techniques to Determine Concentrations in Flow Tank Experiments. Exp. Fluids 2009, 47, 85–93. [Google Scholar] [CrossRef] [Green Version]
- Robinson, G.; Hamill, G.A.; Ahmed, A.A. Automated Image Analysis for Experimental Investigations of Salt Water Intrusion in Coastal Aquifers. J. Hydrol. 2015, 530, 350–360. [Google Scholar] [CrossRef] [Green Version]
- Etsias, G.; Hamill, G.; Benner, E.; Aguila, J.F.; Mc Donnell, M.; Flynn, R. The effect of colour depth and image resolution on laboratory scale study of aquifer saltwater intrusion. In CERAI 2020; Civil Enigineering Association Ireland, Ed.; Civil Engineering Association Ireland: Cork, Ireland, 2020. [Google Scholar]
- Robinson, G.; Ahmed, A.A.; Hamill, G.A. Experimental Saltwater Intrusion in Coastal Aquifers Using Automated Image Analysis: Applications to Homogeneous Aquifers. J. Hydrol. 2016, 538, 304–313. [Google Scholar] [CrossRef] [Green Version]
- Abdoulhalik, A.; Ahmed, A.A.; Hamill, G.A. A New Physical Barrier System for Seawater Intrusion Control. J. Hydrol. 2017, 549, 416–427. [Google Scholar] [CrossRef] [Green Version]
- Abdoulhalik, A.; Ahmed, A.A. The Effectiveness of Cutoff Walls to Control Saltwater Intrusion in Multi-Layered Coastal Aquifers: Experimental and Numerical Study. J. Environ. Manag. 2017, 199, 62–73. [Google Scholar] [CrossRef] [Green Version]
- Abdoulhalik, A.; Ahmed, A.A. How Does Layered Heterogeneity Affect the Ability of Subsurface Dams to Clean up Coastal Aquifers Contaminated with Seawater Intrusion? J. Hydrol. 2017, 553, 708–721. [Google Scholar] [CrossRef] [Green Version]
- Wipfler, E.L.; Ness, M.; Breedveld, G.D.; Marsman, A.; van der Zee, S.E.A.T.M. Infiltration and Redistribution of Lnapl into Unsaturated Layered Porous Media. J. Contam. Hydrol. 2004, 71, 47–66. [Google Scholar] [CrossRef]
- Oostrom, M.; Hofstee, C.; Wietsma, T.W. Behavior of a Viscous Lnapl under Variable Water Table Conditions. Soil Sediment Contam. Int. J. 2006, 15, 543–564. [Google Scholar] [CrossRef]
- O’Carroll, D.M.; Sleep, B.E. Hot Water Flushing for Immiscible Displacement of a Viscous Napl. J. Contam. Hydrol. 2007, 91, 247–266. [Google Scholar] [CrossRef]
- Sun, S. Transient Water Table Influence Upon Light Non-Aqueous Phase Liquids (Lnapls) Redistribution: Laboratory and Modelling Studies; University of Birmingham: Birmingham, UK, 2016. [Google Scholar]
- Gramling, C.; Harvey, C.F.; Meigs, L.C. Reactive Transport in Porous Media: A Comparison of Model Prediction with Laboratory Visualization. Environ. Sci. Technol. 2002, 36, 2508–2514. [Google Scholar] [CrossRef] [PubMed]
- Katz, G.E.; Berkowitz, B.; Guadagnini, A.; Saaltink, M.W. Experimental and Modeling Investigation of Multicomponent Reactive Transport in Porous Media. J. Contam. Hydrol. 2011, 120–121, 27–44. [Google Scholar] [PubMed]
- Castro-Alcalá, E.; Fernàndez-Garcia, D.; Carrera, J.; Bolster, D. Visualization of Mixing Processes in a Heterogeneous Sand Box Aquifer. Environ. Sci. Technol. 2012, 46, 3228–3235. [Google Scholar] [CrossRef] [PubMed]
- Poonoosamy, J.; Kosakowski, G.; Van Loon, L.R.; Mäder, U. Dissolution–Precipitation Processes in Tank Experiments for Testing Numerical Models for Reactive Transport Calculations: Experiments and Modelling. J. Contam. Hydrol. 2015, 177–178, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Dausman, A.M.; Langevin, C.D. Movement of the saltwater interface in the surficial aquifer system in response to hydrologic stresses and water-management practices, broward county, Florida. In Scientific Investigations Report; U.S. Geological Survey, Information Services: Denver, CO, USA, 2005. [Google Scholar]
- Yoon, H.; Kim, Y.; Ha, K.; Lee, S.; Kim, G. Comparative Evaluation of Ann- and Svm-Time Series Models for Predicting Freshwater-Saltwater Interface Fluctuations. Water 2017, 9, 323. [Google Scholar] [CrossRef] [Green Version]
- Lal, A.; Datta, B. Development and Implementation of Support Vector Machine Regression Surrogate Models for Predicting Groundwater Pumping-Induced Saltwater Intrusion into Coastal Aquifers. Water Resour. Manag. 2018, 32, 2405–2419. [Google Scholar] [CrossRef]
- Lal, A.; Datta, B. Modelling Saltwater Intrusion Processes and Development of a Multi-Objective Strategy for Management of Coastal Aquifers Utilizing Planned Artificial Freshwater Recharge. Modeling Earth Syst. Environ. 2018, 4, 111–126. [Google Scholar] [CrossRef]
- Roy, D.; Datta, B. A Review of Surrogate Models and Their Ensembles to Develop Saltwater Intrusion Management Strategies in Coastal Aquifers. Earth Syst. Environ. 2018, 2, 193–211. [Google Scholar] [CrossRef]
- Lal, A.; Datta, B. Multi-Objective Groundwater Management Strategy under Uncertainties for Sustainable Control of Saltwater Intrusion: Solution for an Island Country in the South Pacific. J. Environ. Manag. 2019, 234, 115–130. [Google Scholar] [CrossRef]
- Robinson, G.; Moutari, S.; Ahmed, A.A.; Hamill, G.A. An Advanced Calibration Method for Image Analysis in Laboratory-Scale Seawater Intrusion Problems. Water Resour. Manag. 2018, 32, 3087–3102. [Google Scholar] [CrossRef] [Green Version]
- Kotsiantis, S.B.; Kanellopoulos, D.; Pintelas, P.E. Data Preprocessing for Supervised Leaning. Int. J. Comput. Sci. 2006, 1, 111–117. [Google Scholar]
- De, S.; Bhattacharyya, S.; Chakraborty, S.; Dutta, P. Computational intelligence methods and applications. In Hybrid Soft Computing for Multilevel Image and Data Segmentation; Springer International Publishing: Basel, Switzerland, 2018. [Google Scholar]
- Guyon, I.; Elisseeff, A. An Introduction to Variable and Feature Selection. J. Mach. Learn. Res. 2003, 3, 1157–1182. [Google Scholar]
- May, R.; Dandy, G.; Maier, H. Review of input variable selection methods for artificial neural networks. In Artificial Neural Networks—Methodological Advances and Biomedical Applications; InTechOpen: London, UK, 2011. [Google Scholar]
- Bishop, C.M. Pattern Recognition and Machine Learning; Springer: New York, NY, USA, 2006. [Google Scholar]
- Møller, M.F. A Scaled Conjugate Gradient Algorithm for Fast Supervised Learning. Neural Netw. 1993, 6, 525–533. [Google Scholar] [CrossRef]
- Bishop, C.M. Neural Networks for Pattern Recognition; Oxford University Press, Inc.: Hong Kong, 1995. [Google Scholar]
- Freund, Y.; Schapire, R.E. A Decision-Theoretic Generalization of on-Line Learning and an Application to Boosting. J. Comput. System Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Hagan, M.T.; Menhaj, M.B. Training Feedforward Networks with the Marquardt Algorithm. IEEE Trans. Neural Netw. 1994, 5, 989–993. [Google Scholar] [CrossRef] [PubMed]













| Bead Structure Recognition (Classification) | |
| Training Images | Testing Images |
| Freshwater-only Images | Freshwater-only Images |
| Total Number of Images: 3 | Total Number of Images: 12 |
| 1 Homogeneous 780 μm | 3 Homogeneous 780 μm |
| 1 Homogeneous 1090 μm | 3 Homogeneous 1090 μm |
| 1 Homogeneous 1325 μm | 3 Homogeneous 1325 μm |
| 3 Layered Aquifers | |
| SW Concentration Field Generation (Regression) | |
| Training Images | Testing Images |
| (0%, 5%, 10%, 20%, 30%, 50% | Head Driven SWI and |
| 70%,100% Concentration Images) | SW Plume Flow Images |
| Total Number of Images: 24 | Total Number of Images: 11 |
| 1 Homogeneous 780 μm (8 Images) | 1 Homogeneous 780 μm |
| 1 Homogeneous 1090 μm (8 Images) | 1 Homogeneous 1090 μm |
| 1 Homogeneous 1325 μm (8 Images) | 1 Homogeneous 1325 μm |
| 3 Layered Aquifers (8 Images) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Etsias, G.; Hamill, G.A.; Benner, E.M.; Águila, J.F.; McDonnell, M.C.; Flynn, R.; Ahmed, A.A. Optimizing Laboratory Investigations of Saline Intrusion by Incorporating Machine Learning Techniques. Water 2020, 12, 2996. https://0-doi-org.brum.beds.ac.uk/10.3390/w12112996
Etsias G, Hamill GA, Benner EM, Águila JF, McDonnell MC, Flynn R, Ahmed AA. Optimizing Laboratory Investigations of Saline Intrusion by Incorporating Machine Learning Techniques. Water. 2020; 12(11):2996. https://0-doi-org.brum.beds.ac.uk/10.3390/w12112996
Chicago/Turabian StyleEtsias, Georgios, Gerard A. Hamill, Eric M. Benner, Jesús F. Águila, Mark C. McDonnell, Raymond Flynn, and Ashraf A. Ahmed. 2020. "Optimizing Laboratory Investigations of Saline Intrusion by Incorporating Machine Learning Techniques" Water 12, no. 11: 2996. https://0-doi-org.brum.beds.ac.uk/10.3390/w12112996