Non-Intrusive Measurements of Wave-Induced Flow over Dikes by Means of a Combined Ultrasound Doppler Velocimetry and Videography

 ,
,  ,
,  ,
, 
Abstract
:1. Introduction
2. Description of the Laboratory Tests
- three wave gauges (WG), placed at approximately 1.5 times the maximum Lm−1,0 from the wave-maker (≈ 5 m) to record the free-surface elevation with a sampling frequency of 100 Hz and to separate the incident and reflected waves, according to [42];
- three UVP probes, which were installed along the structure crest and were used to record the time series of the vertical profiles of the horizontal flow velocities (u) and track the free surface elevation or water depth (h). These ultrasound probes were located in proximity of the off-shore edge (D1), in the middle (D2) and close to the in-shore edge (D3) of the dike crest;
- a 30 Hz GoPro camera employed to film in Full HD resolution the wave run-up, flow over the crest and overtopping process; the GoPro was placed at exactly perpendicular positions to the side window of the wave flume where the dike was located (Figure 1);
- a tank for the storage and measurement of the wave overtopping volumes, placed at the end of the wave flume and below the channel (Figure 1), to calculate the cumulated overtopping volume at the end of each test;
- a recirculation system, connected to the channel in order to preserve the water depth throughout the experimental duration.
3. UVP Data Analysis and Processing
3.1. Overview of Basic Concepts
3.2. Scattering Process and UVP Limitations
3.3. Echo and Velocity Profiles Filtering
4. Image Processing: Implementation and Analysis
- (i)
- background removal, with the construction of a mask applied to the original video in order to remove the area of the frames to be neglected from the analysis (e.g., the zone below and behind the dike crest); each RGB image was then transformed into greyscale image (Figure 5a);
- (ii)
- calibration process of estimating camera parameters by using the approach proposed by [63], where images of a planar checkerboard were used; limitations due to lens distortion, optical errors and 2D–3D projections were solved by removing the fish-eye effects and calibrating the camera by the [64] calibration method. The definition of a conversion factor (from pixel to mm) was performed by taking as input one sample image up to reach a maximum conversion error less than 1 pixel (around <0.3 mm in the present field of view). Finally, camera intrinsic (i.e., lens distortion coefficients) and extrinsic parameters were provided as calibration matrix for each test, to obtain the correspondence between the image and the space (real) points;
- (iii)
- training, where classifiers were identified for some representative frames selected from each test video. Once chosen the number of labels M, depending on the image quality (e.g., light exposure, the flow patterns over the crest) and on the bubble entrainment (e.g., wave breaking), the image matrix was converted into a dataset of features, where pixels were classified into a number of classes of membership M, giving the classifier matrix W. In the present analysis, the value of M ranged from 10 to 15 classes. This step was performed for each test day and camera calibration, since the identification of classifiers largely depended on environmental light conditions and glass cleaning, even if the glasses were carefully cleaned and the light conditions were maintained as unchanged as possible. Figure 6b shows as an example the class with the label 13 corresponding to the free surface;
- (iv)
- image clustering, following the Expectation-Maximization (EM) partition technique based on Gaussian distribution mixtures of the dataset (Figure 5b). On the basis of the number M of classes defined in the training process and on the classifier matrix W, each frame of the video was clustered using the nearest mean classifier, which finally divided the image pixel (i.e., intensity) into M clusters. Iteration was performed in order to statistically stabilize the assigned labelling;
- (v)
- pattern recognition, with the elaboration of suitable classifiers that identified the label corresponding to the free surface during the dynamics, e.g., wave run–up and overtopping flow over the dike crest (Figure 5c);
- (vi)
- free surface detection, after filtering noise in the derived signals due to both air entrainment and water drops on the flume glass walls, which reduced the image quality and sharpness, and finally matrix conversion of pixel into meter by applying the calibration coefficients (Figure 5d).
5. Reliability of the Derived Non-Intrusive Measurements
5.1. Flow Depth over the Dike Crest
5.2. Mean Wave Overtopping Discharge
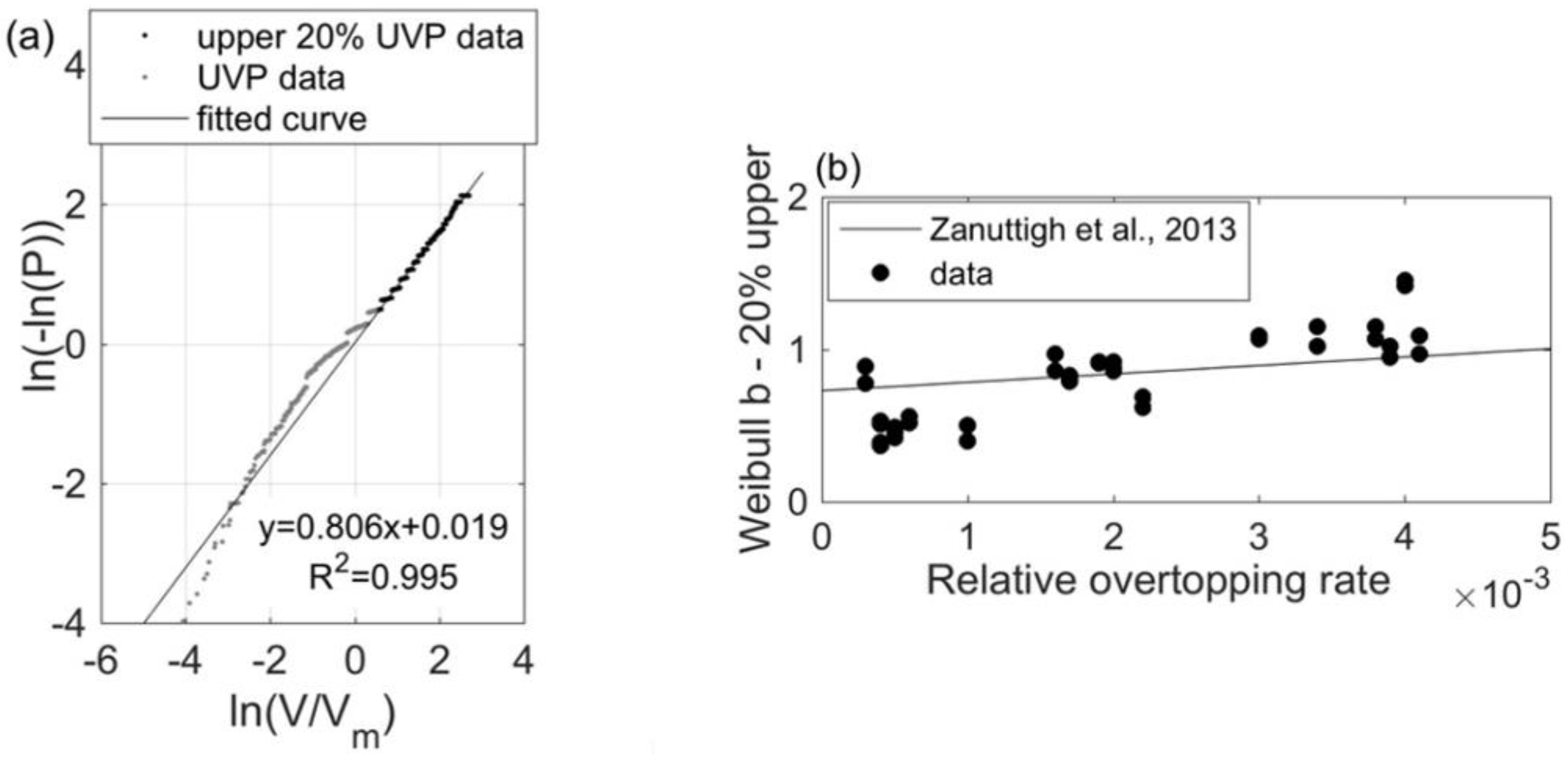
5.3. Estimation of the Individual Wave Overtopping Volume Distribution
6. Conclusions and Suggestions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| a | Scale parameter of the Weibull distribution (m3) |
| b | Shape parameter of the Weibull distribution (-) |
| UVP backscatter (Wm−2) | |
| UVP normalized maximum backscatter (-) | |
| UVP normalized backscatter (-) | |
| UVP normalized backscatter standard deviation (-) | |
| Gate-averaged normalized backscatter standard deviation (-) | |
| c | Sound speed (m s−1) |
| d | UVP diameter (m) |
| UVP intensity level | |
| f | Friction coefficient (m) |
| Doppler shift frequency (s−1) | |
| UVP signal frequency (s−1) | |
| UVP pulse repetition frequency (s−1) | |
| g | Gravity acceleration (m s−2) |
| Gc | Crest width of the dike (m) |
| h | Water depth or thickness over the dike crest (instantaneous) (m) |
| hmean | Mean water depth or thickness over the dike crest (m) |
| UVP side lobe affected thickness (m) | |
| Hs | Significant wave height (m) |
| Lm−1,0 | Spectral wave length (m) |
| M | Image class number (-) |
| x | Horizontal coordinate over the dike crest (m) |
| q | Mean overtopping discharge or rate (m3 s−1) |
| P | Volume probability of not exceedance (-) |
| PMMA | Acronym of “Poly(methyl methacrylate” |
| PSD | Power spectrum density (m2 s) |
| r | UVP spherical spreading or ranging distance (m) |
| R2 | Coefficient of determination (-) |
| Rc | Crest freeboard over SWL of dike (negative if the dike is submerged) (m) |
| sm−1,0 | Wave steepness based on spectral period (-) |
| SWL | Acronym of “Sea Water Level” |
| Tm−1,0 | Spectral wave period (s) |
| Tp | Peak wave period (s) |
| Pulse repetition period (s) | |
| u | Horizontal velocity over the crest (m s−1) |
| UVP | Acronym of “Ultrasound Doppler Velocity Profiler” |
| UVP radial velocity (m s−1) | |
| V | Wave-by-wave overtopping volume (m3) |
| Mean overtopping volume (m3) | |
| wg | Acronym of “Wave Gauges” |
| wd | Water depth at the wave-maker (m) |
| W | Image classifier matrix (-) |
| z | UVP maximum distance between the probe tip and the free surface (m) |
| αoff | Offshore slope of dike (°) |
| γ | Peak enhancement factor of Jonswap spectrum (-) |
| γb | Factor representing the influence of a berm (-) |
| γf | Factor representing the influence of the roughness (-) |
| γv | Factor representing the influence of a wave wall (-) |
| γβ | Factor representing the influence of oblique waves (-) |
| Angle between the UVP central beam and the vertical axis (°) | |
| Mean water surface slope (°) | |
| ξ0,m−1 | Irribarren-Battjes breaker parameter based on spectral wave period (-) |
| Half beam width (°) | |
| Standard deviation |
References
- Couriel, E.; Nielsen, L.; Jayewardene, I.; McPherson, B. The need for physical models in coastal engineering. Proc. Int. Conf. Coast. Eng. 2018, 1, 52. [Google Scholar] [CrossRef] [Green Version]
- Lamberti, A.; Martinelli, L.; Gaeta, M.G.; Tirindelli, M.; Alderson, J. Experimental spatial correlation of wave loads on front decks. J. Hydraul. Res. 2011, 49 (Suppl. 1), 81–90. [Google Scholar] [CrossRef]
- Aleixo, R.; Soares-Frazão, S.; Zech, Y. Statistical analysis methods for transient flows–the dam-break case. J. Hydraul. Res. 2018, 57, 688–701. [Google Scholar] [CrossRef]
- Raby, A.; Jayaratne, R.; Bredmose, H.; Bullock, G. Individual violent wave-overtopping events: Behaviour and estimation. J. Hydraul. Res. 2019. [Google Scholar] [CrossRef]
- Van Gent, M.R. Low-Exceedance Wave Overtopping Events: Measurement of Velocities and the Thickness of Water-Layers on the Crest and Inner Slope of Dikes. Delft Cluster DC030202/H3803, 2002. Delft Hydraulics. Available online: http://resolver.tudelft.nl/uuid:e71289dd-f6aa-471e-856c-832071a83753 (accessed on 1 September 2020).
- Bosman, G.; Van der Meer, J.W.; Hoffmans, G.; Schüttrumpf, H.; Verhagen, H.J. Individual overtopping events at dikes. Coast. Eng. 2008, 2009, 2944–2956. [Google Scholar]
- Schüttrumpf, H.F.R.; Oumeraci, H. Layer thicknesses and velocities of wave overtopping flow at seadikes. Coast. Eng. 2005, 52, 473–495. [Google Scholar] [CrossRef]
- Van der Meer, J.W.; Hardeman, B.; Steendam, G.J.; Schüttrumpf, H.F.R.; Verheij, H. Flow depths and velocities at crest and inner slope of a dike, in theory and with the Wave Overtopping Simulator. Coast. Eng. Proc. 2010, 1, 10. [Google Scholar] [CrossRef] [Green Version]
- Soares-Frazão, S.; Zech, Y.; Alcrudo, F. Laboratory Experiments, Chapter 2. In Dam-break Problems Solutions and Case Studies; De Wrachien, D., Mambretti, S., Eds.; WIT Press: Ashurst Lodge, UK, 2009; ISBN 978-1-84564-142-9. [Google Scholar]
- Vousdoukas, M.I.; Kirupakaramoorthy, T.; de la Torre, M.; Wübbold, F.; Wagner, W.; Schimmels, S.; Oumeraci, H. The role of combined laser scanning and video techniques in monitoring wave-by-wave swash zone processes. Coast. Eng. 2014, 83, 150–165. [Google Scholar] [CrossRef]
- Hofland, B.; Diamantidou, E.; van Steeg, P.; Meys, P. Wave runup and wave overtopping measurements using a laser scanner. Coast. Eng. 2015, 106, 20–29. [Google Scholar] [CrossRef]
- Den Bieman, J.P.; de Ridder, M.P.; van Gent, M.R.A. Deep learning video analysis as measurement technique in physical models. Coast. Eng. 2020, 158, 103689. [Google Scholar] [CrossRef]
- Kantoush, S.A.; De Cesare, G.; Boillat, J.L.; Schleiss, A.J. Flow Field Investigation in a Rectangular Shallow Reservoir using UVP, LSPIV and numerical modelling. J. Flow Meas. Instrum. 2008, 19, 139–144. [Google Scholar] [CrossRef]
- Guerrero, M.; Latosinski, F.; Szupiany, R.N.; Nones, M.; Re, M.; Gaeta, M.G. A sediment fluxes investigation for the 2-D modelling of large river morphodynamics. Adv. Water Resour. 2015, 81, 186–198. [Google Scholar] [CrossRef]
- Eckert, S.; Gerbeth, G.; Melnikov, V.I. Velocity measurements at high temperatures by ultrasound Doppler velocimetry using an acoustic wave guide. Exp. Fluids 2003, 35, 381–388. [Google Scholar] [CrossRef]
- Bressan, L.; Guerrero, M.; Antonini, A.; Petruzzelli, V.; Archetti, R.; Lamberti, A.; Tinti, S. A laboratory experiment on the incipient motion of boulders by high-energy coastal flows. Earth Surf. Process. Landf. 2018, 43, 2935–2947. [Google Scholar] [CrossRef] [Green Version]
- Wüthrich, D.; Pfister, M.; De Cesare, G.; Schleiss, A.J. Velocity profile measurements in bore waves. In Proceedings of the 10th International Symposium on Ultrasonic Doppler Methods for Fluid Mechanics and Fluid Engineering, Tokyo, Japan, 28–30 September 2016; pp. 137–140. [Google Scholar]
- Wüthrich, D.; Pfister, M.; Nistor, I.; Schleiss, A.J. Experimental Study of Tsunami-Like Waves on Dry and Wet Bed Generated with a Vertical Release Technique. J. Waterw. Port Coast. Ocean Eng. 2018, 144, 04018006. [Google Scholar] [CrossRef]
- Mariani, A.; Blacka, M.J.; Cox, R.J.; Coghkan, I.R.; Carley, J.T. Wave overtopping of coastal structures. Physical model versus desktop predictions. J. Coast. Res. 2009, SI 56, 534–538. [Google Scholar]
- Foote, M.; Horn, D. Video Measurement of Swash Zone Hydrodynamics. Geomorphology 1999, 29, 59–76. [Google Scholar] [CrossRef]
- Erikson, L.H.; Hanson, H. A method to extract wave tank data using video imagery and its comparison to conventional data collection techniques. Comput. Geosci. 2005, 31, 371–384. [Google Scholar] [CrossRef]
- Iglesias, G.; Carballo, R. Wave energy potential along the Death Coast (Spain). Energy 2009, 34, 1963–1975. [Google Scholar] [CrossRef]
- Viriyakijja, K.; Chinnarasri, C. Wave Flume Measurement using Image Analysis. Aquat. Procedia 2015, 4, 522–531. [Google Scholar]
- Foti, E.; Rabionet, I.C.; Marini, A.; Musumeci, R.E.; Sánchez-Arcilla, A. Experimental investigations of the bed evolution in wave flumes: Performance of 2D and 3D optical systems. Coast. Eng. 2011, 58, 606–622. [Google Scholar] [CrossRef]
- Astruc, D.; Cazin, S.; Cid, E.; Eiff, O.; Lacaze, L.; Robin, P.; Toublanc, F.; Cáceres, I. A Stereoscopic Method for Rapid Monitoring of the Spatio-Temporal Evolution of the Sand-Bed Elevation in the Swash Zone. Coast. Eng. 2012, 60, 11–20. [Google Scholar] [CrossRef] [Green Version]
- Song, J.; So, S.H.; Lim, H.C. Dynamic characteristics between waves and a floating cylindrical body connected to a tension-leg mooring cable placed in a simulated offshore environment. Int. J. Naval Archit. Ocean Eng. 2016, 8, 375–385. [Google Scholar] [CrossRef] [Green Version]
- Gaeta, M.G.; Segurini, G.; Moreno, A.M.; Archetti, R. Implementation and Validation of a Potential Model for a Moored Floating Cylinder under Waves. J. Mar. Sci. Eng. 2020, 8, 131. [Google Scholar] [CrossRef] [Green Version]
- Hering, F.; Leue, C.; Wierzimok, D.; Jähne, B. Particle tracking velocimetry beneath water waves. Part I: Visualization and tracking algorithms. Exp. Fluids 1997, 23, 472–482. [Google Scholar] [CrossRef]
- Aleixo, R.; Ozeren, Y.; Altinakar, M. PIV-PTV measurements of a tailings dam-break flow. In Hydrodynamic and Mass Transport at Freshwater Aquatic Interfaces; Springer: Cham, Switzerland, 2016; ISBN 9783319277493. [Google Scholar]
- Greated, C.A.; Skyner, D.J.; Bruce, T. Particle image velocimetry (PIV) in the coastal engineering laboratory. Coast. Eng. 1992, 1993, 212–225. [Google Scholar]
- Grue, J.; Liu, P.L.F.; Pedersen, G.K. Advances in Coastal and Ocean Engineering: PIV and Water Waves; World Scientific Publishing Co.: Singapore, 2014; Volume 9. [Google Scholar]
- Jayaratne, R.; Hunt-Raby, A.; Bullock, G.; Bredmose, H. Individual violent overtopping events: New insights. Coast. Eng. 2008, 2009, 2983–2995. [Google Scholar]
- Lugni, C.; Brocchini, M.; Faltinsen, O.M. Wave impact loads: The role of the flip through. Phys. Fluids 2006, 18, 122101. [Google Scholar] [CrossRef]
- Jensen, A. Solitary wave impact on a vertical wall. Eur. J. Mech. B Fluids 2019, 73, 69–74. [Google Scholar] [CrossRef]
- Stansby, P.K.; Feng, T. Surf zone wave overtopping a trapezoidal structure: 1-D modelling and PIV comparison. Coast. Eng. 2004, 51, 483–500. [Google Scholar] [CrossRef]
- Molina, R.; Ortega, M.; Moyano, J.; Losada, M. Analysis of the wave interaction with rubble-mound breakwaters using video imagery techniques. In Proceeding of Mediterranean Days of Coastal and Port Engineering, Palermo, Italy, 7–9 October 2008. PIANC. [Google Scholar]
- Llana, A.; Molina, R.; Camarero, A.; Campos, A.; Alises, A.; López, J.D. Overtopping flow properties characterization in laboratory and prototype through the combination of non intrusive instrumental techniques. Coast. Eng. Proc. 2012, 1. [Google Scholar] [CrossRef]
- Van der Meer, J.W.; Allsop, N.W.H.; Bruce, T.; De Rouck, J.; Kortenhaus, A.; Pullen, T.; Schüttrumpf, H.; Troch, P.; Zanuttigh, B. Manual on Wave Overtopping of Sea Defences and Related Structures. An Overtopping Manual Largely Based on European Research, But for Worldwide Application. EurOtop. 2018. Available online: www.overtopping-manual.com (accessed on 1 September 2020).
- Galvin, C.J. Wave-height prediction for wave generators in shallow water. In Technical Memorandum No. 4; Army Corps of Engineers: Washington, DC, USA, 1964; pp. 1–20. [Google Scholar]
- Wang, S. Plunger-type wavemakers: Theory and experiment. J. Hydraul. Res. 1974, 12, 357–388. [Google Scholar] [CrossRef]
- Formentin, S.; Gaeta, M.G.; Palma, G.; Zanuttigh, B.; Guerrero, M. Flow depths and velocities across a smooth dike crest. Water 2019, 11, 2197. [Google Scholar] [CrossRef] [Green Version]
- Mansard, E.P.D.; Funke, E.R. The Measurement of Incident and Reflected Spectra Using a least Squares Method. In Proceedings of the International Coastal Engineering Conference, Sydney, Australia, 23–28 March 1980. [Google Scholar]
- Takeda, Y. Velocity profile measurement by ultrasound Doppler shift method. Int. J. Heat Fluid Flow 1986, 7, 313–318. [Google Scholar] [CrossRef]
- Abeysekera, S.S. Performance of pulse-pair method of Doppler estimation. IEEE Trans. Aerosp. Electron. Syst. 1998, 34, 520–531. [Google Scholar] [CrossRef]
- Muste, M.; Aberle, J.; Admiraal, D.; Ettema, R.; Garcia, M.H.; Lyn, D.; Nikora, V.; Rennie, C. Experimental Hydraulics: Methods, Instrumentation, Data Processing and Management (IAHR Monograph); CRC Press: Boca Raton, FL, USA; Taylor and Francis: Oxfordshire, UK, 2017; ISBN 978-1-138-02753-4. [Google Scholar]
- Medwin, H.; Clay, S.C. Fundamentals of Acoustical Oceanography, Applications of Modern Acoustics; Academic Press: Cambridge, MA, USA, 1998; ISBN 0080532160, 9780080532165. [Google Scholar]
- Conevski, S.; Guerrero, M.; Ruther, N.; Rennie, C.D. Laboratory investigation of the apparent bedload velocity measured by ADCPs under different transport conditions. J. Hydraul. Eng. 2019, 145, 04019036. [Google Scholar] [CrossRef]
- Urick, R.J. Principle of Underwater Sound, 3rd ed.; Peninsula Publishing: Los Altos Hills, CA, USA, 1983; ISBN 0-932146-62-7. [Google Scholar]
- Longuet-Higgins, M.S. Mass Transport in Water Waves. Philos. Trans. R. Soc. Lond. Ser. A 1953, 245, 535–581. [Google Scholar]
- Fischer, S.; Schmitt, P.; Ensminger, D.; Abda, F.; Pallares, A. A new velocity estimation method using spectral identification of noise. Flow Meas. Instrum. 2008, 19, 197–203. [Google Scholar] [CrossRef]
- Bonmarin, P.; Rochefort, R.; Bourguel, M. Surface wave profile measurement by image analysis. Exp. Fluids 1989, 7, 17–24. [Google Scholar] [CrossRef]
- Nguyen, H.H.; Brossard, J. Detection of wave free surface by image processing. Eur. J. Environ. Civ. Eng. 2008, 12, 307–322. [Google Scholar] [CrossRef]
- Wang, S.; Wu, K.; Yuan, Q.; Liu, X.; Liu, Z.; Lin, X.; Zeng, R.; Zhu, H.; Dong, G.; Qian, Q.; et al. Control of grain size, shape and quality by OsSPL16 in rice. Nat Genet 2012, 44, 950–954. [Google Scholar] [CrossRef] [PubMed]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 8, 679–714. [Google Scholar] [CrossRef] [PubMed]
- Brady, P.; Boutenet, M.; Beecham, S. Free Surface Monitoring Using Image Processing. In Proceedings of the 15th Australasian Fluid Mechanics Conference, Sydney, Australia, 13–17 December 2004. [Google Scholar]
- Ko, S.H.; Lynett, P.J. A study of long wave run-ups on a bi-linear beach slope induced by solitary and transient-focused wave group. Coast. Eng. J. 2019, 61, 135–151. [Google Scholar] [CrossRef]
- Gaeta, M.G.; Lamberti, A. The role of air modeling on numerical investigation of coastal dynamics and wave-structure interactions. Comput. Fluids 2015, 111, 114–126. [Google Scholar] [CrossRef]
- Guerrero, M.; Lamberti, A. Cloud Image Processing for velocity acquisition. In Proceedings of the Congress International Association for Hydraulic Research, Venice, Italy, 1–6 July 2007; Volume 1, pp. 226-1–226-11, ISBN 88-89405-06-6. [Google Scholar]
- Maddock, I.; Harby, A.; Kemp, P.; Wood, P. Ecohydraulics: An Integrated Approach; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2013; ISBN 978-0-470-97600-5. [Google Scholar]
- Duda, R.O.; Hart, P.E.; Stork, D.G. Pattern Classification; John Wiley & Sons: Hoboken, NJ, USA, 2012; p. 688. ISBN 978-0-471-05669-0. [Google Scholar]
- Van der Heijden, F.; Duin, R.P.W.; de Ridder, D.; Tax, D.M.J. Classification, Parameter Estimation and State Estimation: An Engineering Approach Using Matlab; Wiley: Chichester, UK, 2004; p. 440. ISBN 978-0-470-09014-5. [Google Scholar]
- Duin, R.P.W.; Pekalska, E. Pattern Recognition: Introduction and Terminology; Delft University of Technology: Delft, The Netherlands, 2015; Available online: http://resolver.tudelft.nl/uuid:f5c560ed-5fc7-4320-84b4-a20614012bc7 (accessed on 1 September 2020).
- Bouguet, J.Y. Camera Calibration Toolbox for Matlab. 2015. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/index.html (accessed on 1 September 2020).
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef] [Green Version]
- Stoica, P.; Moses, R.L. Spectral Analysis of Signals; Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Zanuttigh, B.; Martinelli, L. Transmission of wave energy at permeable low-crested structures. Coast. Eng. 2008, 55, 1135–1147. [Google Scholar] [CrossRef]
- Franco, L.; de Gerloni, M.; Van der Meer, J.W. Wave overtopping on vertical and composite breakwaters. In Proceedings of the International Coastal Engineering Conference 1994, Kobe, Japan, 23–28 October 1994. [Google Scholar]
- Van der Meer, J.W.; Janssen, J.P.F.M. Wave runup and wave overtopping at dikes. In Wave Forces on Inclined and Vertical Wall Structures; Kobayashi, N., Demirbilek, Z., Eds.; ASCE: New York, NY, USA, 1995; pp. 1–27. [Google Scholar]
- Victor, L.; Van der Meer, J.W.; Troch, P. Probability distribution of individual wave overtopping volumes for smooth impermeable steep slopes with low crest freeboards. Coast. Eng. 2012, 64, 87–101. [Google Scholar] [CrossRef]
- Hughes, S.A.; Thornton, C.I.; van der Meer, J.W.; Scholl, B. Improvements in describing wave overtopping processes. Proc. Int. Conf. Coast. Eng. 2012, 1, 35. [Google Scholar] [CrossRef]
- Iuppa, C.; Cavallaro, L.; Musumeci, R.E.; Vicinanza, D.; Foti, E. Empirical overtopping volume statistics at an OBREC. Coast. Eng. 2019, 152, 152. [Google Scholar] [CrossRef]
- Zanuttigh, B.; Van der Meer, J.W.; Bruce, T.; Hughes, S. Statistical characterisation of extreme overtopping wave volumes. In From Sea to Shore–Meeting the Challenges of the Sea: (Coasts, Marine Structures and Breakwaters 2013); ICE Publishing: Edinburgh, UK, 2014. [Google Scholar]
- Pan, Y.; Lin, L.; Amini, F.; Kuang, C.; Chen, Y. New understanding on the distribution of individual wave overtopping volumes over a levee under negative freeboard. J. Coast. Res. 2016, 75, 1207–1211. [Google Scholar] [CrossRef] [Green Version]
- Molines, J.; Herrera, M.P.; Gomez-Martin, M.E.; Medina, J.R. Distribution of individual wave overtopping volumes on mound breakwaters. Coast. Eng. 2019, 149, 15–27. [Google Scholar] [CrossRef]
- Nørgaard, J.Q.H.; Lykke Andersen, T.; Burcharth, H.F. Distribution of individual wave overtopping volumes in shallow water wave conditions. Coast. Eng. 2014, 83, 15–23. [Google Scholar] [CrossRef]
- Formentin, S.M.; Zanuttigh, B. A new fully-automatic procedure for the identification and the coupling of the overtopping waves. In Proceedings of the International Conference on Coastal Engineering 2018, Baltimore, MD, USA, 30 July–3 August 2018. [Google Scholar]
- Gallach, D. Experimental Study of Wave Overtopping Performance of Steep Low-Crested Structures. Ph.D. Thesis, Ghent University, Ghent, Belgium, 2018; p. 182. [Google Scholar]
- Guta, H.; Fischer, S.; Dufour, D.; Burckbuchler, M.; Fromant, G. Turbulence and sediment transport measurement with a new two components ultrasonic profiler. In Proceedings of the HydroSenSoft, International Symposium and Exhibition on Hydro-Environment Sensors and Software, Madrid, Spain, 26 February–1 March 2019. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rc/Hs | 0 | +0.5 | +1 |
|---|---|---|---|
| sm−1,0 (%) | 3; 4 | 3; 4 | 3; 4 |
| Hs,m−1,0 (m) | 0.04; 0.05; 0.06 | 0.04; 0.05; 0.06 | 0.05; 0.06 |
| wd (m) | 0.35 | 0.32; 0.325 | 0.29; 0.30 |
| cot (αoff) | 2; 4 | 2; 4 | 2; 4 |
| Gc (m) | 0.15; 0.30 | 0.15; 0.30 | 0.15; 0.30 |
| Rc/Hs | ||||
|---|---|---|---|---|
| 0 | 15°, 1.22°, 4 mm | 30 | 5 | 1.8 |
| +1 | 15 | 1 | 1.3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaeta, M.G.; Guerrero, M.; Formentin, S.M.; Palma, G.; Zanuttigh, B. Non-Intrusive Measurements of Wave-Induced Flow over Dikes by Means of a Combined Ultrasound Doppler Velocimetry and Videography. Water 2020, 12, 3053. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113053
Gaeta MG, Guerrero M, Formentin SM, Palma G, Zanuttigh B. Non-Intrusive Measurements of Wave-Induced Flow over Dikes by Means of a Combined Ultrasound Doppler Velocimetry and Videography. Water. 2020; 12(11):3053. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113053
Chicago/Turabian StyleGaeta, Maria Gabriella, Massimo Guerrero, Sara Mizar Formentin, Giuseppina Palma, and Barbara Zanuttigh. 2020. "Non-Intrusive Measurements of Wave-Induced Flow over Dikes by Means of a Combined Ultrasound Doppler Velocimetry and Videography" Water 12, no. 11: 3053. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113053