An Augmented Reality Facility to Run Hybrid Physical-Numerical Flood Models

 , ,
, ,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
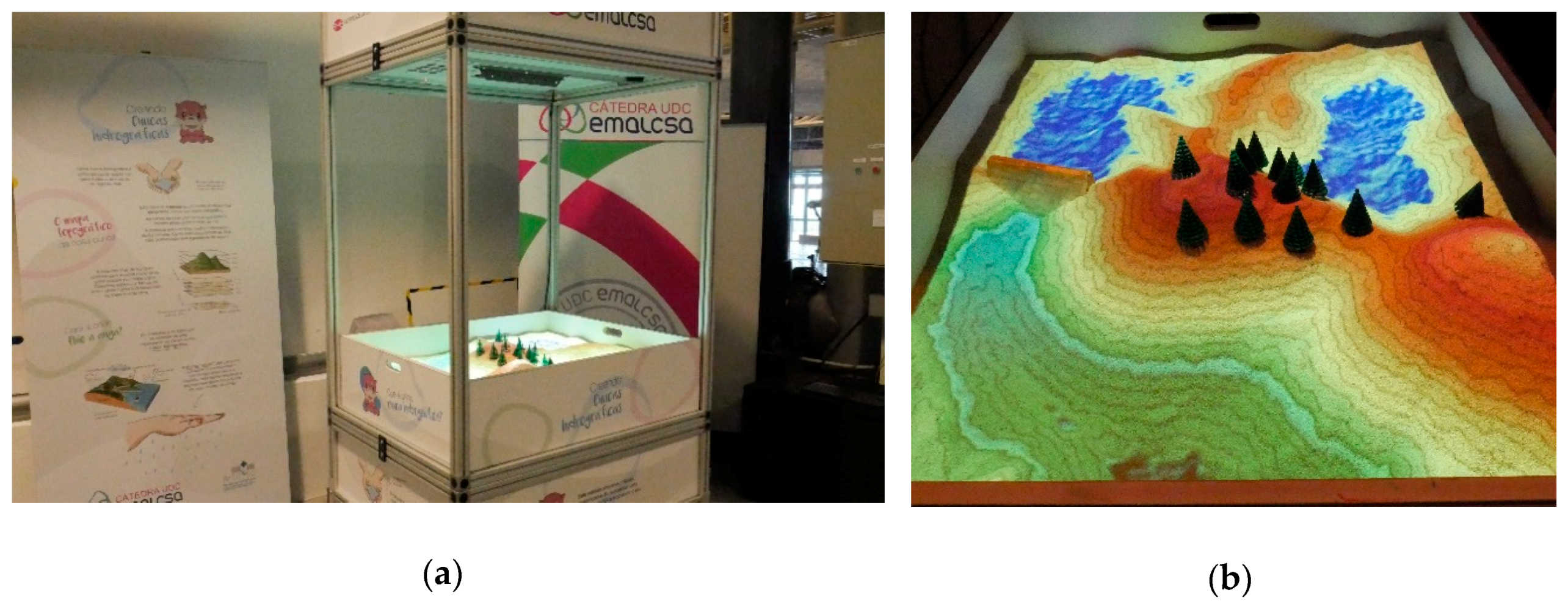
2.1. Experimental Facility
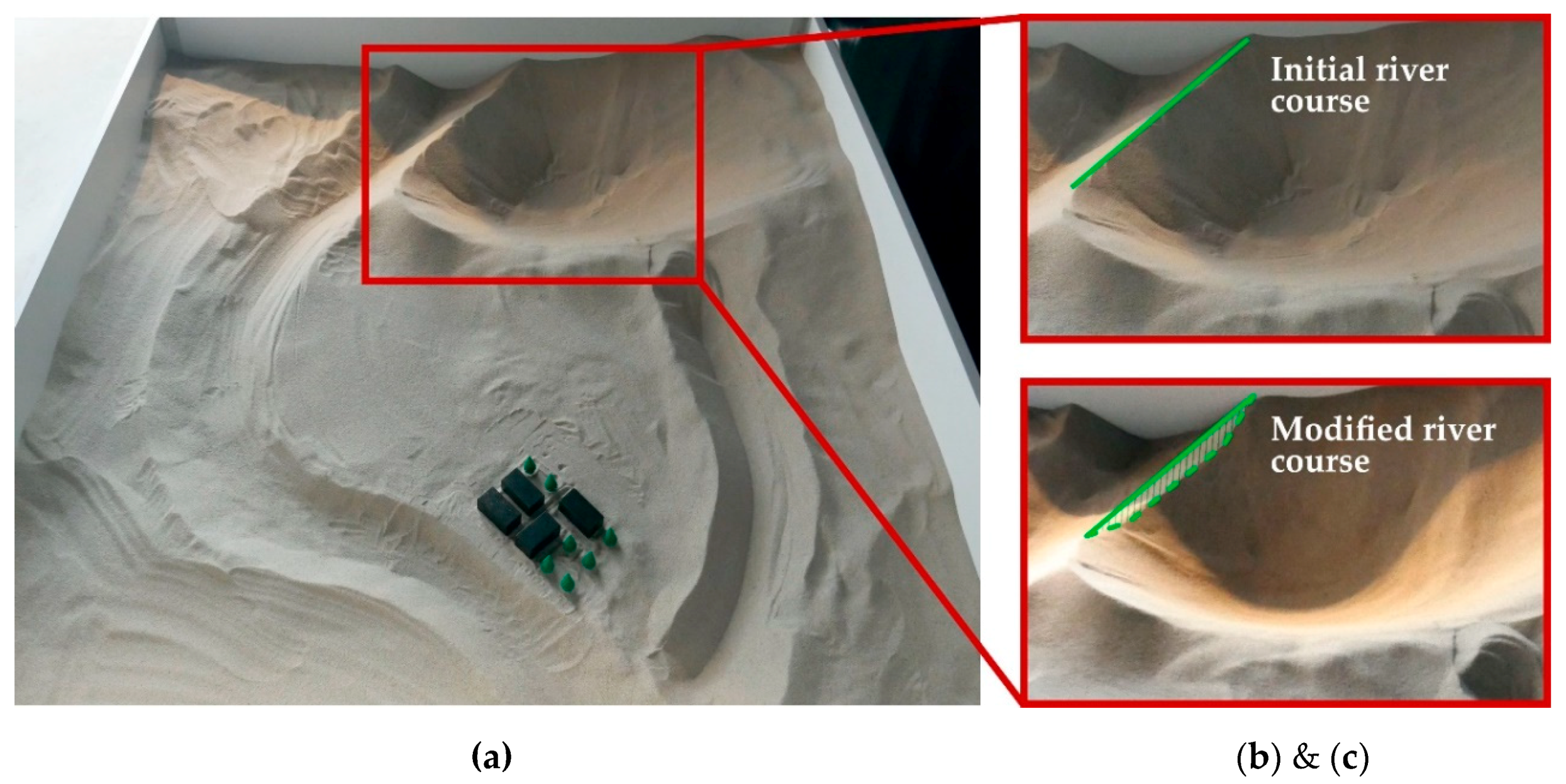
- Building a geometry in the sandbox that represents the terrain to be modeled and incorporates the desired additional elements (buildings, dikes, etc.).
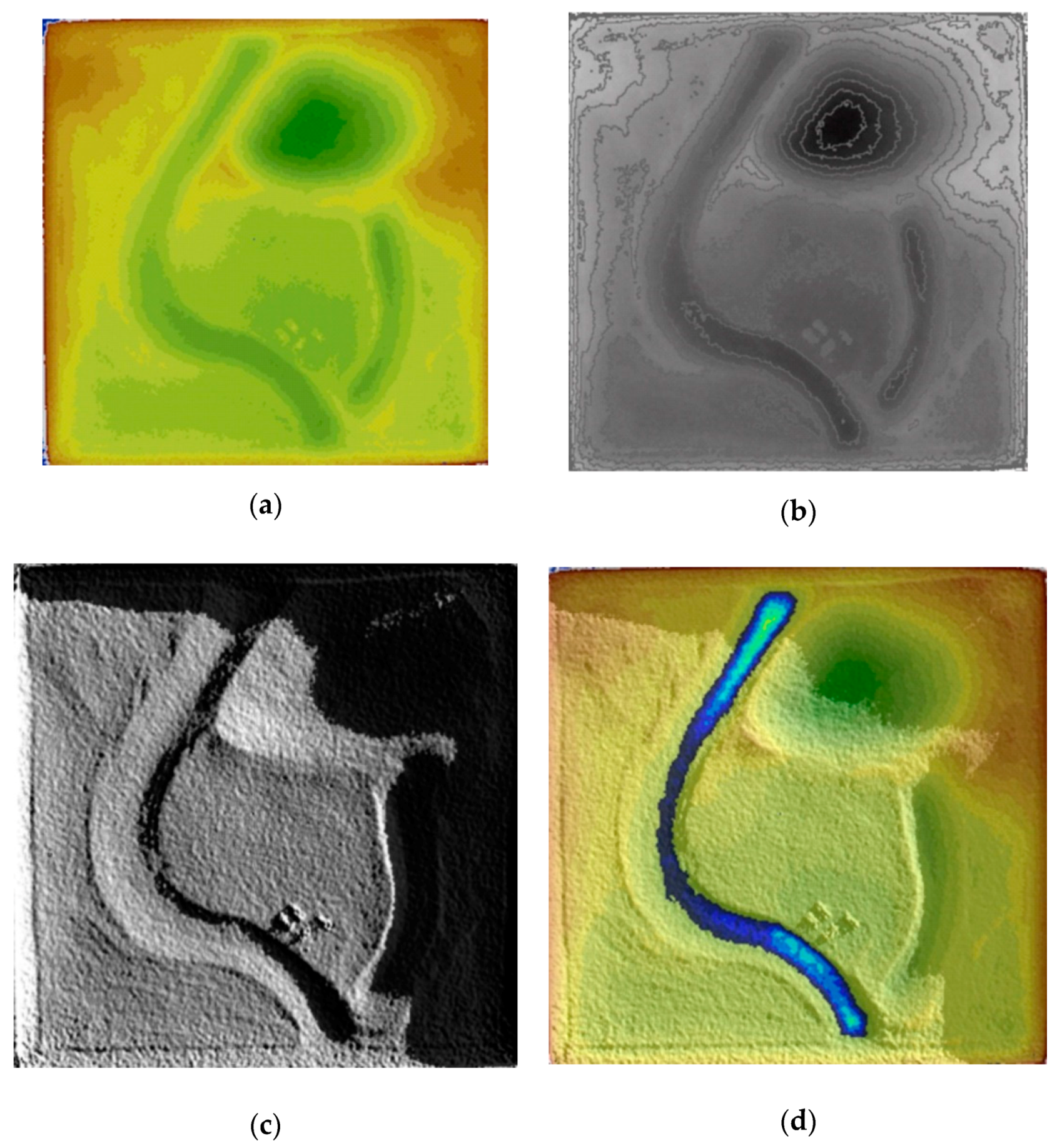
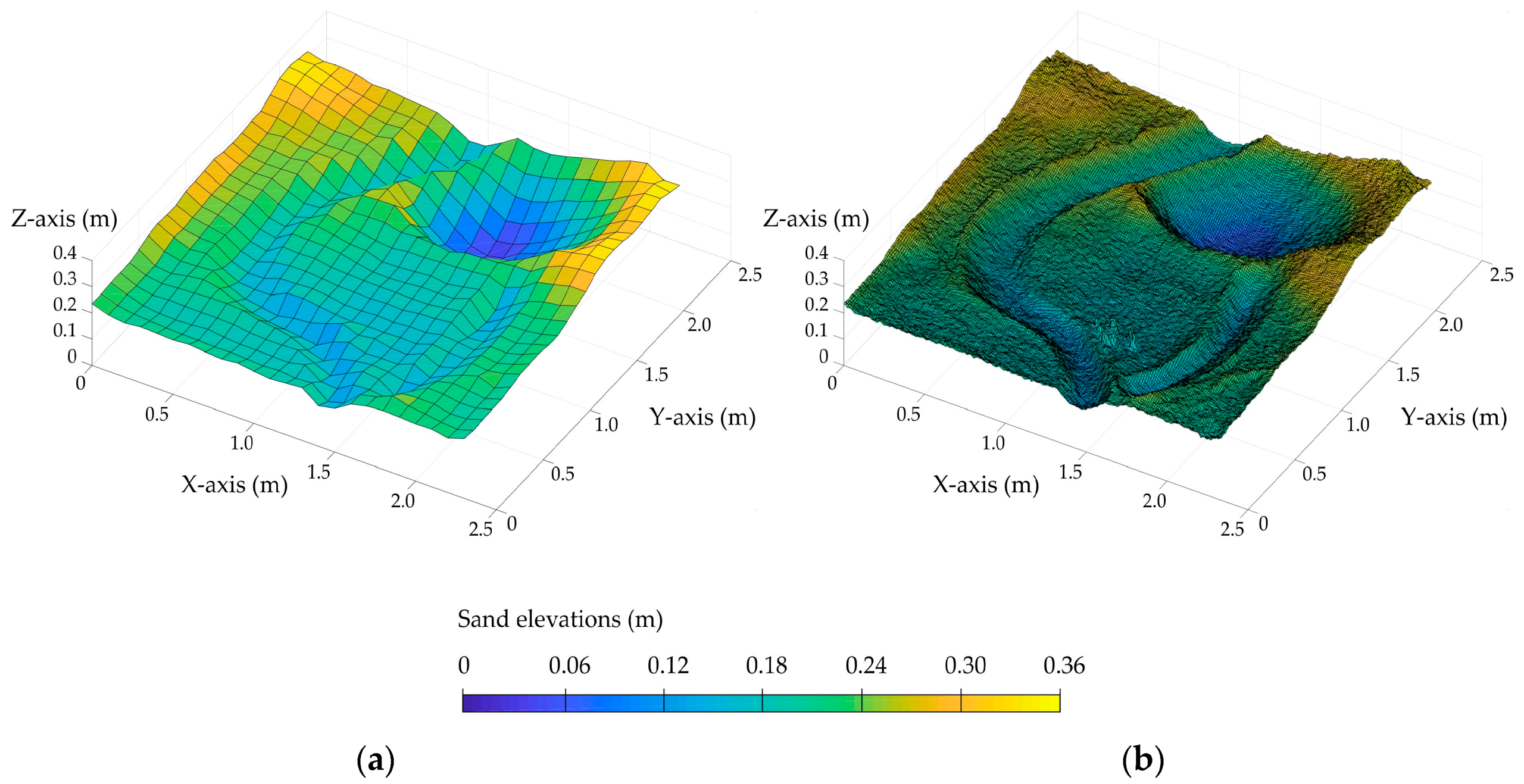
- Extracting the digital elevation model (DEM) from the geometry. For this purpose, MEDUSA-6 includes as an element for topographic restitution a Kinect sensor, the same as the one used in the AR-SandBox installation. From the depth data of a set of points in the physical model, the TopoSandbox software, also developed by this team, obtains a DEM corresponding to the topography associated with the terrain that is being simulated, and calculates its characteristics such as contour lines, hypsometric curves, solar illumination or projected shadows (Figure 2).
- Projecting contours, hypsometric curves or other data visualizations on the sandbox, to make visible the altimetry and detect possible calibration errors. Periodic calibration of the equipment is recommended and should be executed the first time the system is run.
- Defining, through a simple interface, the spatial scales of the model, as well as the input hydrographs, the boundary and initial conditions, and the spatial discretization. This interface is accessible to any user, which allows the installation to be used for teaching purposes.
- Running the two-dimensional river inundation model Iber+ (www.iberaula.com) directly from the interface.
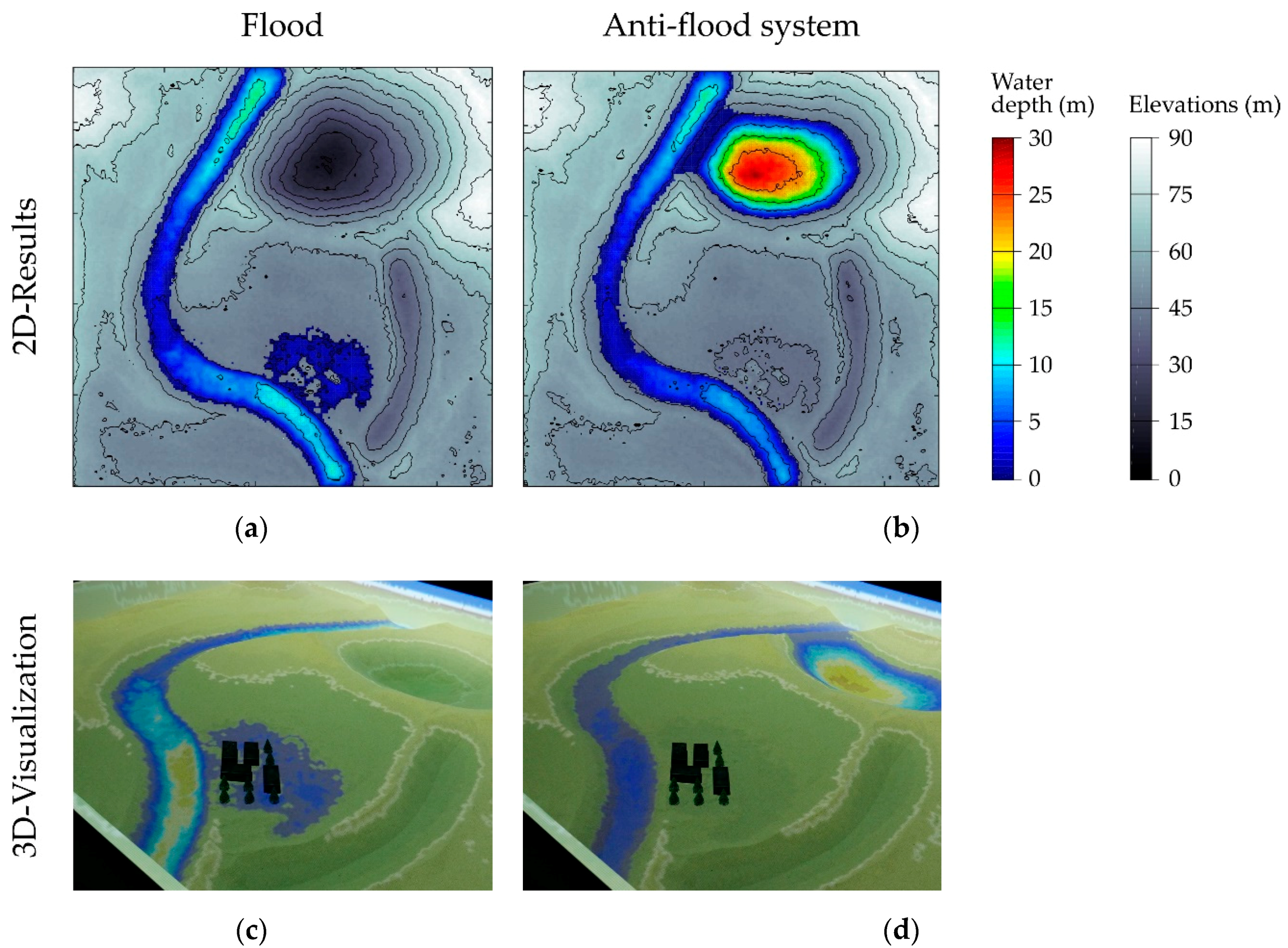
- Projecting the water depth results computed by the model onto the sandbox in real time, which makes it possible to observe the time evolution of the flow in the main channels, the flooding of low level areas, and the filling or emptying of controlled flood zones, for example.
- Repeating the work cycle by varying the topography and geometry (by manipulating the sand or the objects placed in the sandbox) and/or the hydrographs and boundary conditions.
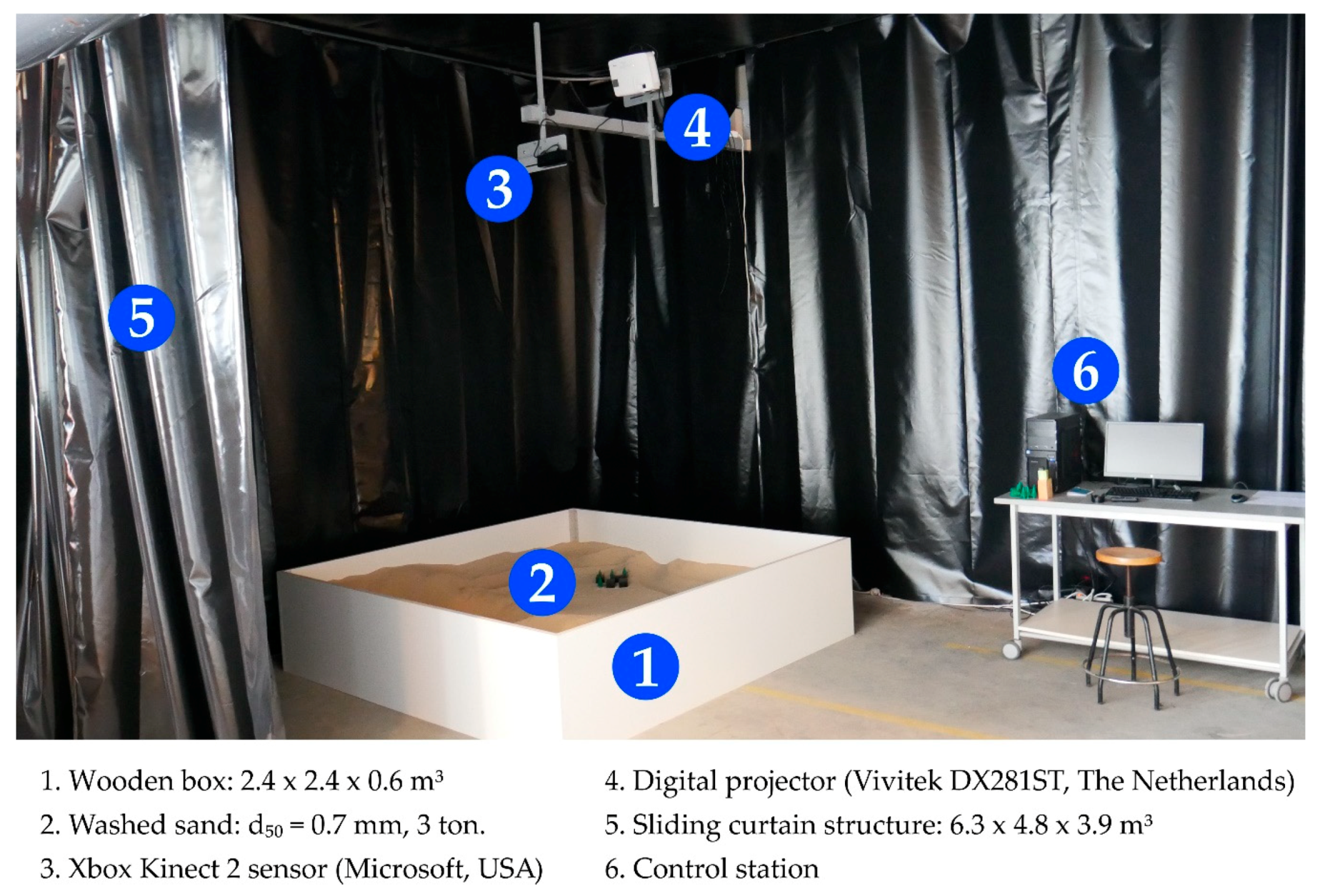
- A sandbox of 2.4 × 2.4 m2. This is much larger than the usual standards for the AR-Sandbox, since the aim is to be able to implement relatively complex geometries, without reaching the precision of the physical models of the traditional hydraulic laboratories, yet with a relatively good degree of definition.
- The sand bed has an average depth of 40 cm, which allows the easy generation of river reaches, depressions and reservoir areas at various scales. The range of reasonable scales to represent in this installation is 100–1000, and it is possible to work with distorted scales in horizontal and vertical directions.
- The sensors and cameras that allow us to obtain the height of the sand surface and objects placed in the sandbox, with which the digital model of elevations will be calculated. The installation is modular and allows the configuration of any element. Currently, we are working with a Kinect-2 module, which is placed 3.5 m above the average sand height. This module integrates a distance sensor (depth camera), thus making it possible to superimpose the DTM onto the image of the sandbox. The depth camera of the Kinect-2 module works by sending a structured infrared light pattern of 34,749 points repeated 3 × 3 times over the scene. The scene is captured from a slightly offset point of view, obtaining the distance to the sensor by computing the parallax of each of the points. The resolution and precision of the position information will therefore be variable, since the density of points projected onto a surface will decrease with the distance of the sensor from it, both in horizontal and vertical aperture and in depth. In this installation, the horizontal and vertical resolution between measurements is 0.72 cm for an average distance of 3 m. The resolution in depth is also variable, as we have noted. Although there are no manufacturer specifications, there are studies that indicate a depth resolution of 2.4 cm at a distance of 3 m [19]. However, the measurements taken in our installation give us a vertical resolution of 1.4 cm, regarding the distance between the sand surface and the Kinect-2 sensor. The projection onto the sandbox of the contours defined by the sensors, and the results of the model, are done by a conventional projector. The specific model in the MEDUSA-6 installation is the Vivitek DX281ST (Vivitek, The Netherlands) and was chosen for its projection surface and its luminosity at an accessible cost.
- An opaque curtain for a more suitable projection space.
- A control station where the software package TopoSandBox, registered at the University of A. Coruña, is installed. This software performs all operations related to the work cycle in a compact way, including the numerical simulation with the Iber software (which is also integrated into the system). In this way, all work develops with great simplicity and from a single interface, accessible to any type of user, thus allowing didactic or professional uses. A screen is available for the visualization of the model and for the projection of the results onto the sandbox itself.
- The simulator is calibrated by projecting the computer screen displaying topographical features, such as contour lines, which are obtained from the depth data measurements of the Kinect-2 module. Then, a small calibration tool that is included in the TopoSandBox software allows translation and zooming of the projection until it matches the real world coordinates. Regular-shaped objects, easy to identify, should be placed on the sand to facilitate the procedure.
2.2. Iber Numerical Model
2.2.1. Description of the Hydraulic Software
2.2.2. Implementation in MEDUSA-6
3. Use of the Installation and a Quantitative Example
3.1. Educational and Training Use
3.2. Application to a Case Study
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mateos, C. La modelación física en las obras hidráulicas. Ing. Agua 2000, 7, 55–70. [Google Scholar] [CrossRef]
- Moy de Vitry, M.; Dicht, S.; Leitão, J.P. floodX: Urban flash flood experiments monitored with conventional and alternative sensors. Earth Syst. Sci. Data 2017, 9, 657–666. [Google Scholar] [CrossRef] [Green Version]
- Teng, J.; Jakeman, A.J.; Vaze, J.; Croke, B.F.; Dutta, D.; Kim, S. Flood inundation modelling: A review of methods, recent advances and uncertainty analysis. Environ. Model. Softw. 2017, 90, 201–216. [Google Scholar] [CrossRef]
- Mignot, E.; Li, X.; Dewals, B. Experimental modelling of urban flooding: A review. J. Hydrol. 2019, 568, 334–342. [Google Scholar] [CrossRef] [Green Version]
- Puertas, J.; Rabuñal, J. CITEEC. Catálogo de Proyectos de Investigación e Innovación Tecnológica 2000–2017, 1st ed.; Servizo de Publicacións Universidade da Coruña: A Coruña, Spain, 2017; p. 170. ISBN 978-84-9749-662-9. Available online: https://www.udc.es/citeec/documentos/catalogo_citeec.pdf (accessed on 29 September 2020).
- Regueiro-Picallo, M.; Rojo-López, G.; Puertas, J. A-CITEEC: A strategic research consortium for R&D&I and transfer of results in civil engineering and building. Int. J. Sustain. High. Educ. in press.
- Li, W.; Nee, A.Y.C.; Ong, S.K. A state-of-the-art review of augmented reality in engineering analysis and simulation. Multimodal Technol. Interact. 2017, 1, 17. [Google Scholar] [CrossRef]
- Art+Com. Terravision Project. 1994. Available online: https://artcom.de/en/project/terravision/ (accessed on 22 September 2020).
- Hernandez-Ibáñez, L.; Taibo, J.; Seoane, A. Una aplicación para la navegación en tiempo real sobre grandes modelos topográficos. In Proceedings of the CEIG, Jaen, Spain, 16–19 June 1999. [Google Scholar]
- Omniglobe. Available online: https://arcscience.com/omniglobe-installations/ (accessed on 22 September 2020).
- Hernandez-Ibañez, L.; Taibo, J.; Seoane, A.; López, R.; Jaspe, A.; Varela, A. Real-time visualization of geospatial features through integration of GIS with a realistic 3D terrain dynamic visualization system. In Proceedings of the XXII International Cartographic Conference (ICC2005), A Coruña, Spain, 9–16 July 2005. [Google Scholar]
- Piper, B.; Ratti, C.; Ishii, H. Illuminating Clay: A 3-D Tangible Interface for Landscape Analysis. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Minneapolis, MN, USA, 20–25 April 2002; pp. 355–362. [Google Scholar]
- iSandbox. Available online: https://ar-sandbox.com/ (accessed on 22 September 2020).
- Priestnall, G.; Gardiner, J.; Durrant, J.; Goulding, J. Projection augmented relief models (PARM): Tangible displays for geographic information. In Proceedings of the Electronic Visualisation and the Arts (EVA 2012), London, UK, 10–12 July 2012; pp. 180–187. [Google Scholar] [CrossRef] [Green Version]
- Reed, S.; Kreylos, O.; Hsi, S.; Kellogg, L.; Schladow, G.; Yikilmaz, M.B.; Segale, H.; Silverman, J.; Yalowitz, S.; Sato, E. Shaping Watersheds Exhibit: An Interactive, Augmented Reality Sandbox for Advancing Earth Science Education. In Proceedings of the American Geophysical Union Fall Meeting 2014, San Francisco, CA, USA, 15–19 December 2014. ED34A-01. [Google Scholar]
- ARSandbox. Available online: https://arsandbox.ucdavis.edu/ (accessed on 22 September 2020).
- Kreylos, O.; Kellogg, L.H.; Reed, S.; Hsi, S.; Yikilmaz, M.B.; Schladow, G.; Segale, H.; Chan, L. The AR Sandbox: Augmented Reality in Geoscience Education. In Proceedings of the American Geophysical Union Fall Meeting 2016, San Francisco, CA, USA, 12–16 December 2016. ED51H-0843. [Google Scholar]
- Reas, C.; Fry, B. Processing: A Programming Handbook for Visual Designers and Artists, 2nd ed.; The MIT Press: Cambridge, MA, USA, 2014; p. 672. [Google Scholar]
- Khoshelham, K.; Elberink, S.O. Accuracy and Resolution of Kinect Depth Data for Indoor Mapping Applications. Sensors 2012, 12, 1437–1454. [Google Scholar] [CrossRef] [Green Version]
- García-Feal, O.; González-Cao, J.; Gómez-Gesteira, M.; Cea, L.; Domínguez, J.M.; Formella, A. An accelerated tool for flood modelling based on Iber. Water 2018, 10, 1459. [Google Scholar] [CrossRef] [Green Version]
- Bladé, E.; Cea, L.; Corestein, G.; Escolano, E.; Puertas, J.; Vázquez-Cendón, M.E.; Dolz, J.; Coll, A. Iber: Herramienta de simulación numérica del flujo en ríos. Rev. Int. Métodos Numéricos Cálculo Diseño Ing. 2014, 30, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Roe, P.L. Discrete models for the numerical analysis of time-dependent multidimensional gas dynamics. J. Comput. Phys. 1986, 63, 458–476. [Google Scholar] [CrossRef] [Green Version]
- Bermúdez, A.; Dervieux, A.; Desideri, J.A.; Vázquez-Cendón, M.E. Upwind schemes for the two-dimensional shallow water equations with variable depth using unstructured meshes. Comput. Methods Appl. Mech. Eng. 1998, 155, 49–72. [Google Scholar] [CrossRef] [Green Version]
- Garrote, J.; Alvarenga, F.M.; Díez-Herrero, A. Quantification of flash flood economic risk using ultra-detailed stage–damage functions and 2-D hydraulic models. J. Hydrol. 2016, 541, 611–625. [Google Scholar] [CrossRef]
- Bermúdez, M.; Neal, J.C.; Bates, P.D.; Coxon, G.; Freer, J.E.; Cea, L.; Puertas, J. Quantifying local rainfall dynamics and uncertain boundary conditions into a nested regional-local flood modelling system. Water Resour. Res. 2017, 53, 2770–2785. [Google Scholar] [CrossRef] [Green Version]
- Sopelana, J.; Cea, L.; Ruano, S. A continuous simulation approach for the estimation of extreme flood inundation in coastal river reaches affected by meso and macro tides. Nat. Hazards 2018, 93, 1337–1358. [Google Scholar] [CrossRef]
- Areu-Rangel, O.S.; Cea, L.; Bonasia, R.; Espinosa-Echavarria, V.J. Impact of Urban Growth and Changes in Land Use on River Flood Hazard in Villahermosa, Tabasco (Mexico). Water 2019, 11, 304. [Google Scholar] [CrossRef] [Green Version]
- Cea, L.; Bladé, E.; Sanz-Ramos, M.; Fraga, I.; Sañudo, E.; García-Feal, O.; Gómez-Gesteira, M.; González-Cao, J. Benchmarking of the Iber Capabilities for 2D Free Surface Flow Modelling; Servizo de Publicacións Universidade da Coruña: A Coruña, Spain, 2020; ISBN 978-84-9749-764-0. Available online: http://hdl.handle.net/2183/24588 (accessed on 29 September 2020).
- Fraga, I.; Cea, L.; Puertas, J. Validation of a 1D-2D dual drainage model under unsteady part-full and surcharged sewer conditions. Urban Water J. 2017, 14, 74–84. [Google Scholar] [CrossRef]
- Sanz-Ramos, M.; Amengual, A.; Bladé, E.; Romero, R.; Roux, H. Flood forecasting using a coupled Hydrological and Hydraulic Model (based on FVM) and high resolution Meteorological Model. In Proceedings of the E3S Web of Conferences, Volume 40 (2018), River Flow 2018—Ninth International Conference on Fluvial Hydraulics, Lyon-Villeurbanne, France, 5–8 September 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Fraga, I.; Cea, L.; Puertas, J. MERLIN: A flood hazard forecasting system for coastal river reaches. Nat. Hazards 2020, 100, 1171–1193. [Google Scholar] [CrossRef]
- Fernández-Nóvoa, D.; García-Feal, O.; González-Cao, J.; de Gonzalo, C.; Rodríguez-Suárez, J.A.; Ruiz del Portal, C.; Gómez-Gesteira, M. MIDAS: A New Integrated Flood Early Warning System for the Miño River. Water 2020, 12, 2319. [Google Scholar] [CrossRef]
- Cea, L.; Blade, E. A simple and efficient unstructured finite volume scheme for solving the shallow water equations in overland flow applications. Water Resour. Res. 2015, 51, 5464–5486. [Google Scholar] [CrossRef] [Green Version]
- Cea, L.; Bermúdez, M.; Puertas, J.; Bladé, E.; Corestein, G.; Escolano, E.; Conde, A.; Bockelmann-Evans, B.; Ahmadian, R. IberWQ—New simulation tool for 2D water quality modelling in rivers and shallow estuaries. J. Hydroinform. 2016, 18, 816–830. [Google Scholar] [CrossRef] [Green Version]
- García-Feal, O.; Cea, L.; González-Cao, J.; Domínguez, J.M.; Gómez-Gesteira, M. IberWQ: A GPU Accelerated Tool for 2D Water Quality Modeling in Rivers and Estuaries. Water 2020, 12, 413. [Google Scholar] [CrossRef] [Green Version]
- Cea, L.; Garrido, M.; Puertas, J.; Jácome, A.; del Río, H.; Suárez, J. Overland flow computations in urban and industrial catchments from direct precipitation data using a two-dimensional shallow water model. Water Sci. Technol. 2010, 62, 1998–2008. [Google Scholar] [CrossRef] [PubMed]
- Fraga, I.; Cea, L.; Puertas, J.; Suárez, J.; Jiménez, V.; Jácome, A. Global sensitivity and GLUE-based uncertainty analysis of a 2D-1D dual urban drainage model. J. Hydrol. Eng. 2016, 21, 04016004. [Google Scholar] [CrossRef]
- Bladé, E.; Sánchez-Juny, M.; Arbat-Bofill, M.; Dolz, J. Computational modelling of fine sediment relocation within a dam reservoir by means of artificial flood generation in a reservoir cascade. Water Resour. Res. 2019, 55, 3156–3170. [Google Scholar] [CrossRef]
- Cea, L.; Legout, C.; Grangeon, T.; Nord, G. Impact of model simplifications on soil erosion predictions: Application of the GLUE methodology to a distributed event-based model at the hillslope scale. Hydrol. Process. 2016, 30, 1096–1113. [Google Scholar] [CrossRef]
- Naves, J.; Rieckermann, J.; Cea, L.; Puertas, J.; Anta, J. Global and local sensitivity analysis to improve the understanding of physically-based urban wash-off models from high-resolution laboratory experiments. Sci. Total Environ. 2020, 709, 136152. [Google Scholar] [CrossRef]
- Bladé, E.; Sanz-Ramos, M.; Vericat, D.; Palau-Ibars, A. New Tools to Assess the Suitability of Physical Habitat (SPH) and the Weighted Usable Area (WUA) for Fishes. In Advances in Hydroinformatics; Gourbesville, P., Caignaert, G., Eds.; Springer: Singapore, 2020; pp. 735–743. [Google Scholar] [CrossRef]
- Sanz-Ramos, M.; Bladé Castellet, E.; Palau Ibars, A.; Vericat Querol, D.; Ramos-Fuertes, A. IberHABITAT: Evaluación de la Idoneidad del Hábitat Físico y del Hábitat Potencial Útil para peces. Aplicación en el río Eume. Ribagua 2019, 6, 158–167. [Google Scholar] [CrossRef] [Green Version]
- Ruiz-Villanueva, V.; Bladé, E.; Sánchez-Juny, M.; Marti-Cardona, B.; Díez-Herrero, A.; Bodoque, J.M. Two-dimensional numerical modeling of wood transport. J. Hydroinform. 2014, 16, 1077. [Google Scholar] [CrossRef]
- Viero, D.P.; Peruzzo, P.; Carniello, L.; Defina, A. Integrated mathematical modeling of hydrological and hydrodynamic response to rainfall events in rural lowland catchments. Water Resour. Res. 2014, 50, 5941–5957. [Google Scholar] [CrossRef] [Green Version]
- Viero, D.P.; Valipour, M. Modeling anisotropy in free-surface overland and shallow inundation flows. Adv. Water Resour. 2017, 104, 1–14. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Puertas, J.; Hernández-Ibáñez, L.; Cea, L.; Regueiro-Picallo, M.; Barneche-Naya, V.; Varela-García, F.-A. An Augmented Reality Facility to Run Hybrid Physical-Numerical Flood Models. Water 2020, 12, 3290. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113290
Puertas J, Hernández-Ibáñez L, Cea L, Regueiro-Picallo M, Barneche-Naya V, Varela-García F-A. An Augmented Reality Facility to Run Hybrid Physical-Numerical Flood Models. Water. 2020; 12(11):3290. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113290
Chicago/Turabian StylePuertas, Jerónimo, Luis Hernández-Ibáñez, Luis Cea, Manuel Regueiro-Picallo, Viviana Barneche-Naya, and Francisco-Alberto Varela-García. 2020. "An Augmented Reality Facility to Run Hybrid Physical-Numerical Flood Models" Water 12, no. 11: 3290. https://0-doi-org.brum.beds.ac.uk/10.3390/w12113290