
Nonlinear Extended Observer-Based ADRC for a Lower-Limb PAM-Based Exoskeleton

 , ,
, ,  , and
, and 
Abstract
:1. Introduction
- We build a mathematical model of the PAM-based exoskeleton robot named BK-Gait.
- We improve the tracking performance of the robot by implementing an NLESO-based ADRC controller, which utilizes a nonlinear ESO that can accurately approximate the system disturbance.
- We develop a feedback controller based on the Lyapunov stability theory. The controller shows outstanding effectiveness when guiding the robot to follow a gait pattern trajectory.
2. Problem Statement
2.1. System Description
2.2. System Modeling
3. Nonlinear Eso-Based ADRC Controller
- Tracking Differentiator (TD), which avoids a sharp deviation of the output signal from its reference. Alternatively, one can create a desirable reference orbit that is physically feasible;
- Extended State Observer (ESO), which estimates the function to remove the unknown component in the model control;
- Nonlinear Feedback Controller (), which controls the state variables of the model to follow the desired trajectory.
3.1. Tracking Differentiator (Td)
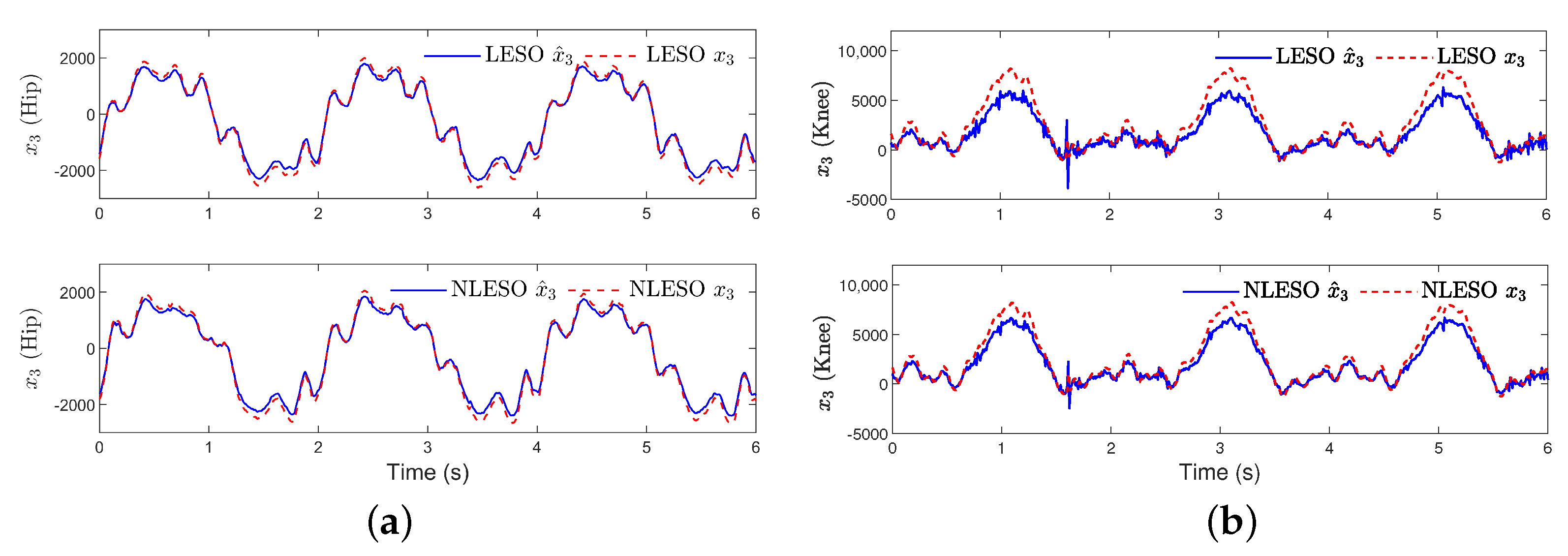
3.2. Extended State Observer (Eso)
- •
- is bounded for any ,
- •
- ,
- •
- .
- •
- uniformly in , for every constant .
- •
- For any , there is , so that , where is an initial value independent constant.
3.3. Feedback Controller
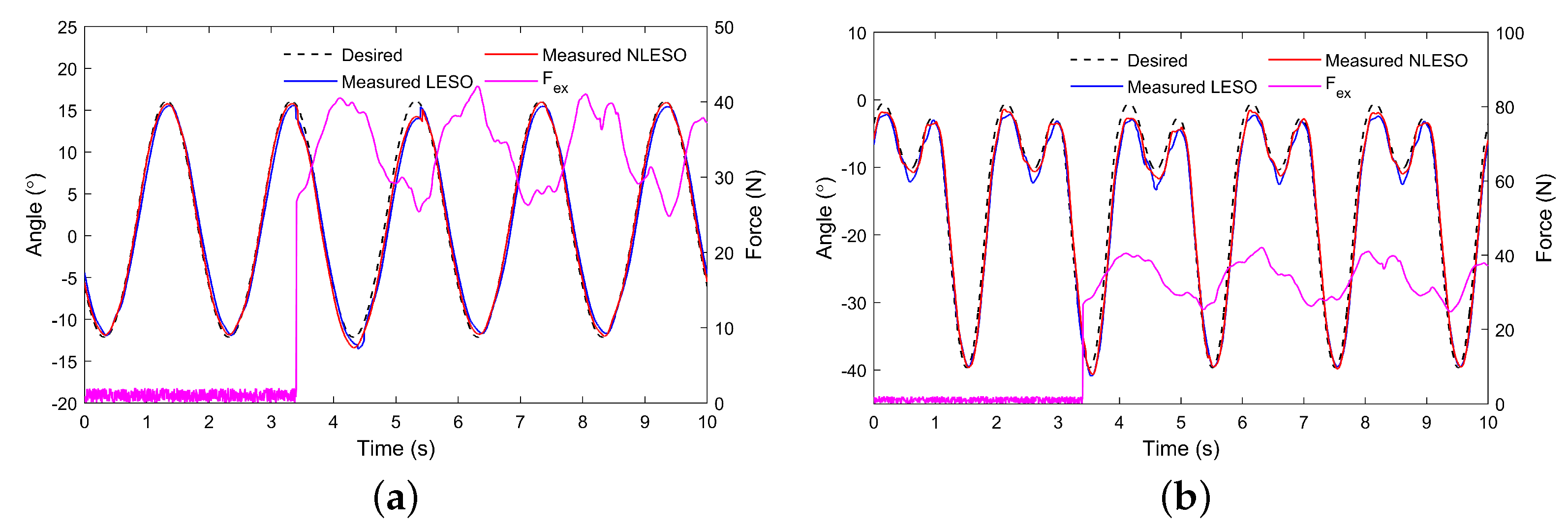
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| PAM | Pneumatic Artificial Muscle |
| ADRC | Active Disturbance Rejection Control |
| ESO | Extended State Observer |
| LESO | Linear Extended State Observer |
| NLESO | Nonlinear Extended State Observer |
| TD | Tracking Differentiator |
| RMSE | Root Mean Square Error |
| EMG | Electromyography |
References
- Zhou, J.; Yang, S.; Xue, Q. Lower limb rehabilitation exoskeleton robot: A review. Adv. Mech. Eng. 2021, 13, 16878140211011862. [Google Scholar] [CrossRef]
- Hussain, F.; Goecke, R.; Mohammadian, M. Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proc. Inst. Mech. Eng. Part J. Eng. Med. 2021, 235, 1375–1385. [Google Scholar] [CrossRef] [PubMed]
- Rosen, J. Wearable Robotics: Systems and Applications; Academic Press: Cambridge, MA, USA, 2019. [Google Scholar]
- Zhang, J.; Sheng, J.; O’Neill, C.T.; Walsh, C.J.; Wood, R.J.; Ryu, J.H.; Desai, J.P.; Yip, M.C. Robotic Artificial Muscles: Current Progress and Future Perspectives. IEEE Trans. Robot. 2019, 35, 761–781. [Google Scholar] [CrossRef]
- Andrikopoulos, G.; Nikolakopoulos, G.; Manesis, S. Advanced Nonlinear PID-Based Antagonistic Control for Pneumatic Muscle Actuators. IEEE Trans. Ind. Electron. 2014, 61, 6926–6937. [Google Scholar] [CrossRef]
- Vo-Minh, T.; Tjahjowidodo, T.; Ramon, H.; Van Brussel, H. A New Approach to Modeling Hysteresis in a Pneumatic Artificial Muscle Using The Maxwell-Slip Model. IEEE/ASME Trans. Mechatron. 2011, 16, 177–186. [Google Scholar] [CrossRef]
- Kosaki, T.; Minesaki, A.; Sano, M. Adaptive Hysteresis Compensation with a Dynamic Hysteresis Model for Control of a Pneumatic Muscle Actuator. J. Environ. Eng. 2012, 7, 53–65. [Google Scholar] [CrossRef] [Green Version]
- Xie, S.; Mei, J.; Liu, H.; Wang, Y. Hysteresis modeling and trajectory tracking control of the pneumatic muscle actuator using modified Prandtl–Ishlinskii model. Mech. Mach. Theory 2018, 120, 213–224. [Google Scholar] [CrossRef]
- Dao, Q.T.; Yamamoto, S.i. Assist-as-Needed Control of a Robotic Orthosis Actuated by Pneumatic Artificial Muscle for Gait Rehabilitation. Appl. Sci. 2018, 8, 499. [Google Scholar] [CrossRef] [Green Version]
- Taheri, B.; Case, D.; Richer, E. Force and Stiffness Backstepping-Sliding Mode Controller for Pneumatic Cylinders. IEEE/ASME Trans. Mechatronics 2014, 19, 1799–1809. [Google Scholar] [CrossRef]
- Zhao, L.; Cheng, H.; Xia, Y.; Liu, B. Angle Tracking Adaptive Backstepping Control for a Mechanism of Pneumatic Muscle Actuators via an AESO. IEEE Trans. Ind. Electron. 2019, 66, 4566–4576. [Google Scholar] [CrossRef]
- Liang, D.; Sun, N.; Wu, Y.; Chen, Y.; Fang, Y.; Liu, L. Energy-Based Motion Control for Pneumatic Artificial Muscle Actuated Robots With Experiments. IEEE Trans. Ind. Electron. 2022, 69, 7295–7306. [Google Scholar] [CrossRef]
- Sun, N.; Liang, D.; Wu, Y.; Chen, Y.; Qin, Y.; Fang, Y. Adaptive Control for Pneumatic Artificial Muscle Systems With Parametric Uncertainties and Unidirectional Input Constraints. IEEE Trans. Ind. Inform. 2020, 16, 969–979. [Google Scholar] [CrossRef]
- Humaidi, A.J.; Ibraheem, I.K.; Azar, A.T.; Sadiq, M.E. A new adaptive synergetic control design for single link robot arm actuated by pneumatic muscles. Entropy 2020, 22, 723. [Google Scholar] [CrossRef]
- Estrada, A.; Plestan, F. Second order sliding mode output feedback control with switching gains—Application to the control of a pneumatic actuator. J. Frankl. Inst. 2014, 351, 2335–2355. [Google Scholar] [CrossRef]
- Dao, Q.T.; Mai, D.H.; Nguyen, D.K.; Ly, N.T. Adaptive Parameter Integral Sliding Mode Control of Pneumatic Artificial Muscles in Antagonistic Configuration. J. Control. Autom. Electr. Syst. 2022, 33, 1116–1124. [Google Scholar] [CrossRef]
- Hussain, S.; Xie, S.Q.; Jamwal, P.K. Adaptive Impedance Control of a Robotic Orthosis for Gait Rehabilitation. IEEE Trans. Cybern. 2013, 43, 1025–1034. [Google Scholar] [CrossRef] [PubMed]
- Dao, Q.T.; Nguyen, M.L.; Yamamoto, S.i. Discrete-Time Fractional Order Integral Sliding Mode Control of an Antagonistic Actuator Driven by Pneumatic Artificial Muscles. Appl. Sci. 2019, 9, 2503. [Google Scholar] [CrossRef] [Green Version]
- Zhao, L.; Cheng, H.; Zhang, J.; Xia, Y. Adaptive control for a motion mechanism with pneumatic artificial muscles subject to dead-zones. Mech. Syst. Signal Process. 2021, 148, 107155. [Google Scholar] [CrossRef]
- Hodgson, S.; Tavakoli, M.; Pham, M.T.; Leleve, A. Nonlinear Discontinuous Dynamics Averaging and PWM-Based Sliding Control of Solenoid-Valve Pneumatic Actuators. IEEE/ASME Trans. Mechatron. 2015, 20, 876–888. [Google Scholar] [CrossRef] [Green Version]
- Lin, C.J.; Sie, T.Y.; Chu, W.L.; Yau, H.T.; Ding, C.H. Tracking Control of Pneumatic Artificial Muscle-Activated Robot Arm Based on Sliding-Mode Control. Actuators 2021, 10, 66. [Google Scholar] [CrossRef]
- Dao, Q.T.; Tri, T.K.L.; Nguyen, V.A.; Nguyen, M.L. Discrete-time sliding mode control with power rate exponential reaching law of a pneumatic artificial muscle system. Control Theory Technol. 2022, 19, 221–238. [Google Scholar] [CrossRef]
- Rezoug, A.; Hamerlain, F.; Hamerlain, M. Application of Fuzzy Sliding Mode to control of Manipulator Robot actuated by Pneumatic artificial Muscles. In Proceedings of the 2nd IFAC Conference on Intelligent Control Systems and Signal Processing, Istanbul, Turkey, 21–23 September 2009; pp. 580–585. [Google Scholar] [CrossRef]
- Balasubramanian, K.; Rattan, K. Feedforward control of a non-linear pneumatic muscle system using fuzzy logic. In Proceedings of the 12th IEEE International Conference on Fuzzy Systems, FUZZ ’03, Glasgow, UK, 25–28 May 2003; Volume 1, pp. 272–277. [Google Scholar] [CrossRef]
- Wang, T.; Chen, X.; Qin, W. A novel adaptive control for reaching movements of an anthropomorphic arm driven by pneumatic artificial muscles. Appl. Soft Comput. 2019, 83, 105623. [Google Scholar] [CrossRef]
- Pham, H.A.H.; Cao Van Kien, N.N.S.; Nam, N.T. New approach of sliding mode control for nonlinear uncertain pneumatic artificial muscle manipulator enhanced with adaptive fuzzy estimator. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418773204. [Google Scholar] [CrossRef]
- Huy Anh Ho Pham, N.N.S.; Kien, C.V. Adaptive neural compliant force-position control of serial PAM robot. J. Intell. Robot. Syst. 2018, 89, 351–369. [Google Scholar] [CrossRef]
- Xia, X.; Cheng, L. Adaptive Takagi-Sugeno fuzzy model and model predictive control of pneumatic artificial muscles. Sci. China Technol. Sci. 2021, 64, 2272–2280. [Google Scholar] [CrossRef]
- Ahn, K.K.; Anh, H.P.H. Design & Implementation an Adaptive Takagi-Sugeno Fuzzy Neural Networks Controller for the 2-Links Pneumatic Artificial Muscle (PAM) Manipulator using in Elbow Rehabilitation. In Proceedings of the 2006 First International Conference on Communications and Electronics, Hanoi, Vietnam, 10–11 Octobetr 2006; pp. 356–361. [Google Scholar] [CrossRef]
- Han, J. From PID to Active Disturbance Rejection Control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Huang, C.; Zheng, Q. Application of linear active disturbance rejection control to power system load frequency control. Int. J. Intell. Control Syst. 2014, 19, 1–7. [Google Scholar]
- Alvarez, U.; Olascoaga, A.; Rivera, D.; Mendoza, A.R.; Garcia, O.; Amezquita-Brooks, L. Active disturbance rejection control for micro air vehicles using frequency domain analysis. In Proceedings of the Congreso Nacional de Control Automático, Nuevo León, Mexico, 4–6 October 2017; pp. 683–688. [Google Scholar]
- Suhail, S.A.; Bazaz, M.A.; Hussain, S. Active disturbance rejection control applied to a DC motor for position control. In Proceedings of the ICETIT 2019, Delhi, India, June 2019; pp. 437–448. [Google Scholar]
- Aole, S.; Elamvazuthi, I.; Waghmare, L.; Patre, B.; Meriaudeau, F. Improved Active Disturbance Rejection Control for Trajectory Tracking Control of Lower Limb Robotic Rehabilitation Exoskeleton. Sensors 2020, 20, 3681. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, X.; Wang, T. Trajectory tracking control for double-joint manipulator systems driven by pneumatic artificial muscles based on a nonlinear extended state observer. Mech. Syst. Signal Process. 2019, 122, 307–320. [Google Scholar] [CrossRef]
- Reynolds, D.; Repperger, D.; Phillips, C.; Bandry, G. Modeling the dynamic characteristics of pneumatic muscle. Ann. Biomed. Eng. 2003, 31, 310–317. [Google Scholar] [CrossRef]
- Lilly, J.; Quesada, P. A two-input sliding-mode controller for a planar arm actuated by four pneumatic muscle groups. IEEE Trans. Neural Syst. Rehabil. Eng. 2004, 12, 349–359. [Google Scholar] [CrossRef] [PubMed]
- Choi, T.Y.; Lee, J.J. Control of Manipulator Using Pneumatic Muscles for Enhanced Safety. IEEE Trans. Ind. Electron. 2010, 57, 2815–2825. [Google Scholar] [CrossRef]
- Guo, B.Z.; Zhao, Z.L. Active disturbance rejection control: Theoretical perspectives. Commun. Inf. Syst. 2015, 15, 361–421. [Google Scholar] [CrossRef] [Green Version]
- Herbst, G. A Simulative Study on Active Disturbance Rejection Control (ADRC) as a Control Tool for Practitioners. Electronics 2013, 2, 246–279. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Guo, B.Z. On convergence of nonlinear active disturbance rejection control for MIMO systems. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 434–441. [Google Scholar] [CrossRef]
- Zheng, Q.; Gaol, L.Q.; Gao, Z. On stability analysis of active disturbance rejection control for nonlinear time-varying plants with unknown dynamics. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 3501–3506. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||||
| Value | 25 | 25 | 35 | 30 |
| Parameters | ||||
| Value | 15 | 20 | 0.015 | 0.01 |
| Parameters | |||||
| Value | 25 | 25 | 35 | 30 | 15 |
| Parameters | |||||
| Value | 20 | 0.015 | 0.01 | 0.9 | 0.9 |
| Joint | Signal Frequency | RMSE | |
|---|---|---|---|
| LESO | NLESO | ||
| Hip | 0.5 Hz | 1.075 | 0.923 |
| 0.5 Hz (Disturbance) | 1.753 | 1.534 | |
| Knee | 0.5 Hz | 1.598 | 1.271 |
| 0.5 Hz (Disturbance) | 2.657 | 2.342 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dao, Q.-T.; Dinh, V.-V.; Trinh, M.-C.; Tran, V.-C.; Nguyen, V.-L.; Duong, M.-D.; Bui, N.-T. Nonlinear Extended Observer-Based ADRC for a Lower-Limb PAM-Based Exoskeleton. Actuators 2022, 11, 369. https://0-doi-org.brum.beds.ac.uk/10.3390/act11120369
Dao Q-T, Dinh V-V, Trinh M-C, Tran V-C, Nguyen V-L, Duong M-D, Bui N-T. Nonlinear Extended Observer-Based ADRC for a Lower-Limb PAM-Based Exoskeleton. Actuators. 2022; 11(12):369. https://0-doi-org.brum.beds.ac.uk/10.3390/act11120369
Chicago/Turabian StyleDao, Quy-Thinh, Van-Vuong Dinh, Minh-Chien Trinh, Viet-Cuong Tran, Van-Linh Nguyen, Minh-Duc Duong, and Ngoc-Tam Bui. 2022. "Nonlinear Extended Observer-Based ADRC for a Lower-Limb PAM-Based Exoskeleton" Actuators 11, no. 12: 369. https://0-doi-org.brum.beds.ac.uk/10.3390/act11120369