Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields

 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
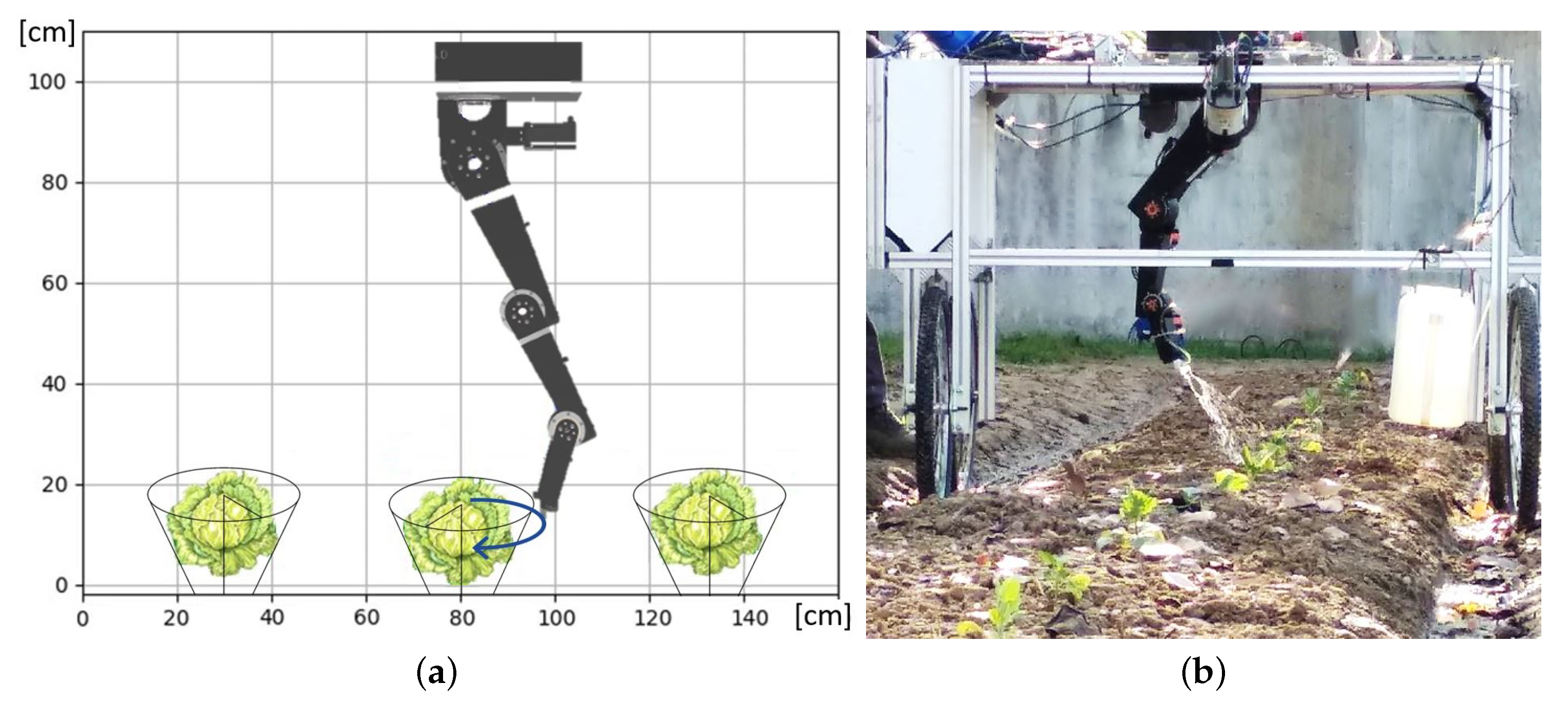
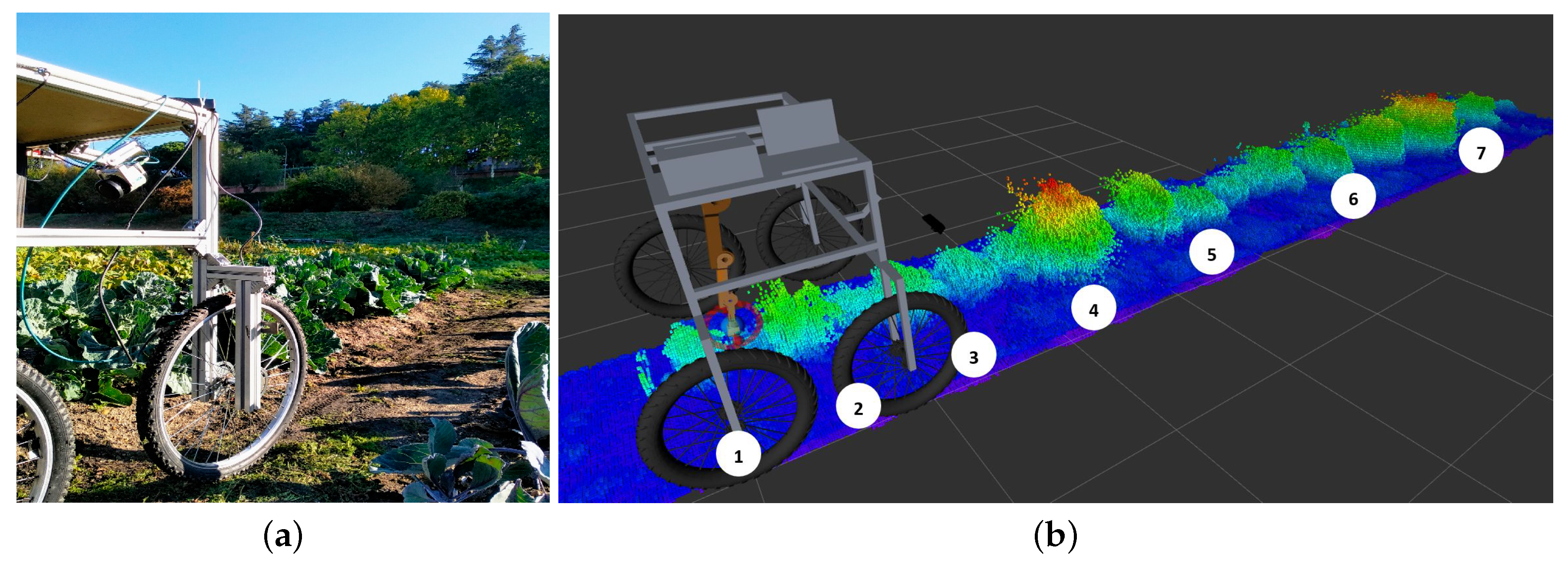
2.1. Materials
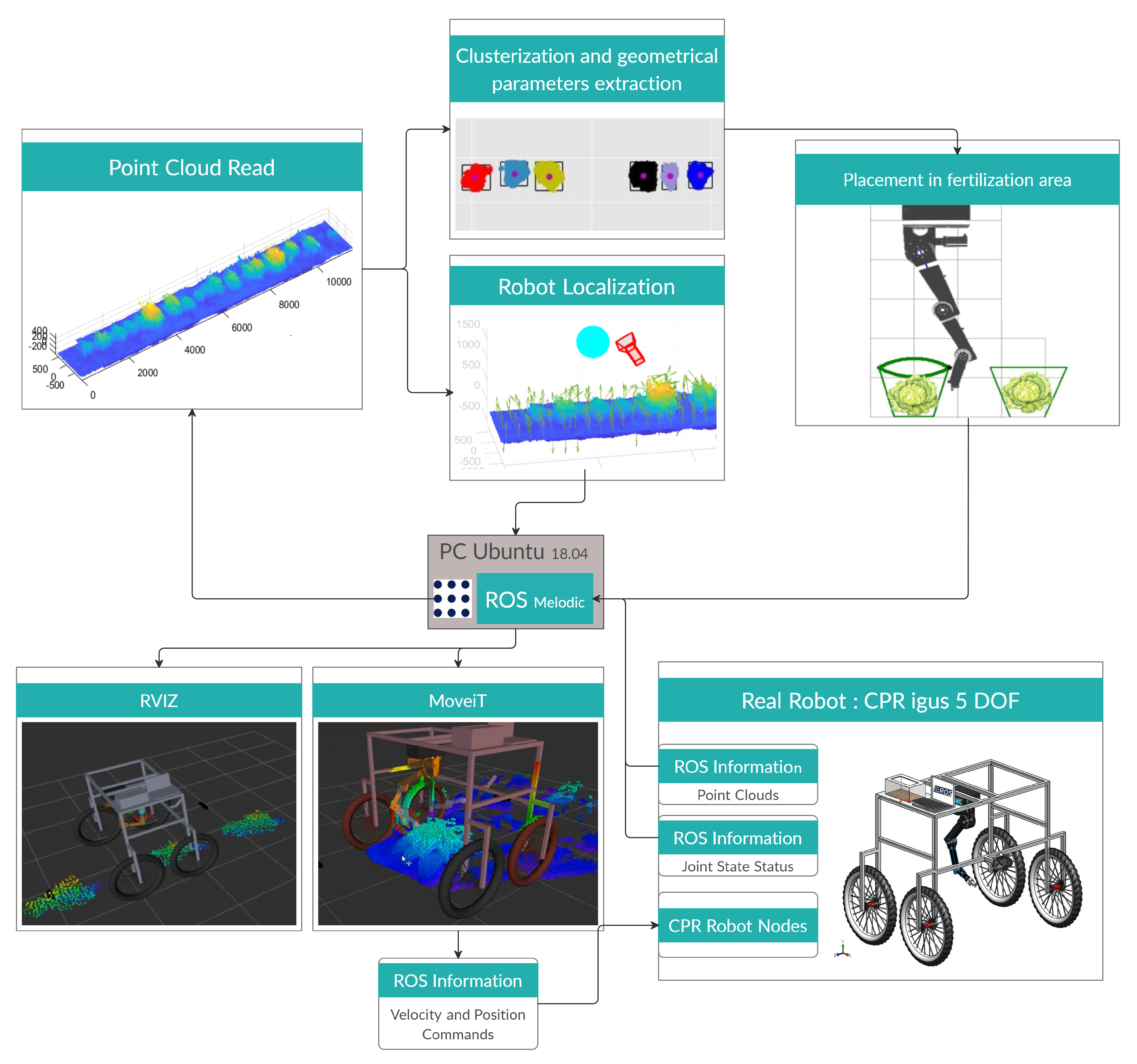
2.2. Interaction between Subsystems
2.2.1. Data Acquisition and Communications
2.2.2. Robot Positioning Based on Geometrical Parameters Extraction of the Plants
2.3. Robot Localisation System in Row-Growing
2.3.1. Normals Calculation
2.3.2. Key Points Extraction
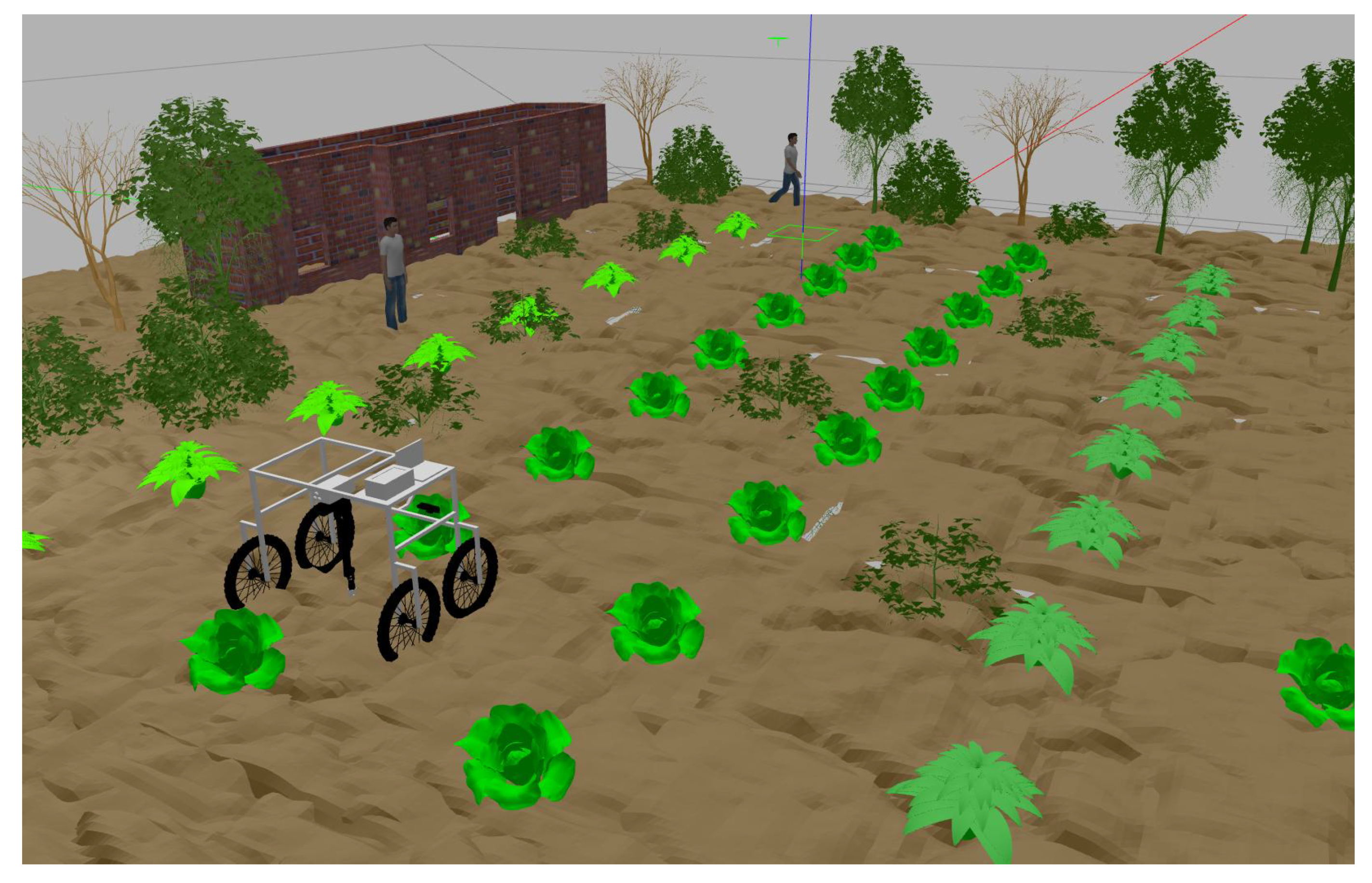
2.4. Simulated Gazebo Environment
3. Results and Discussion
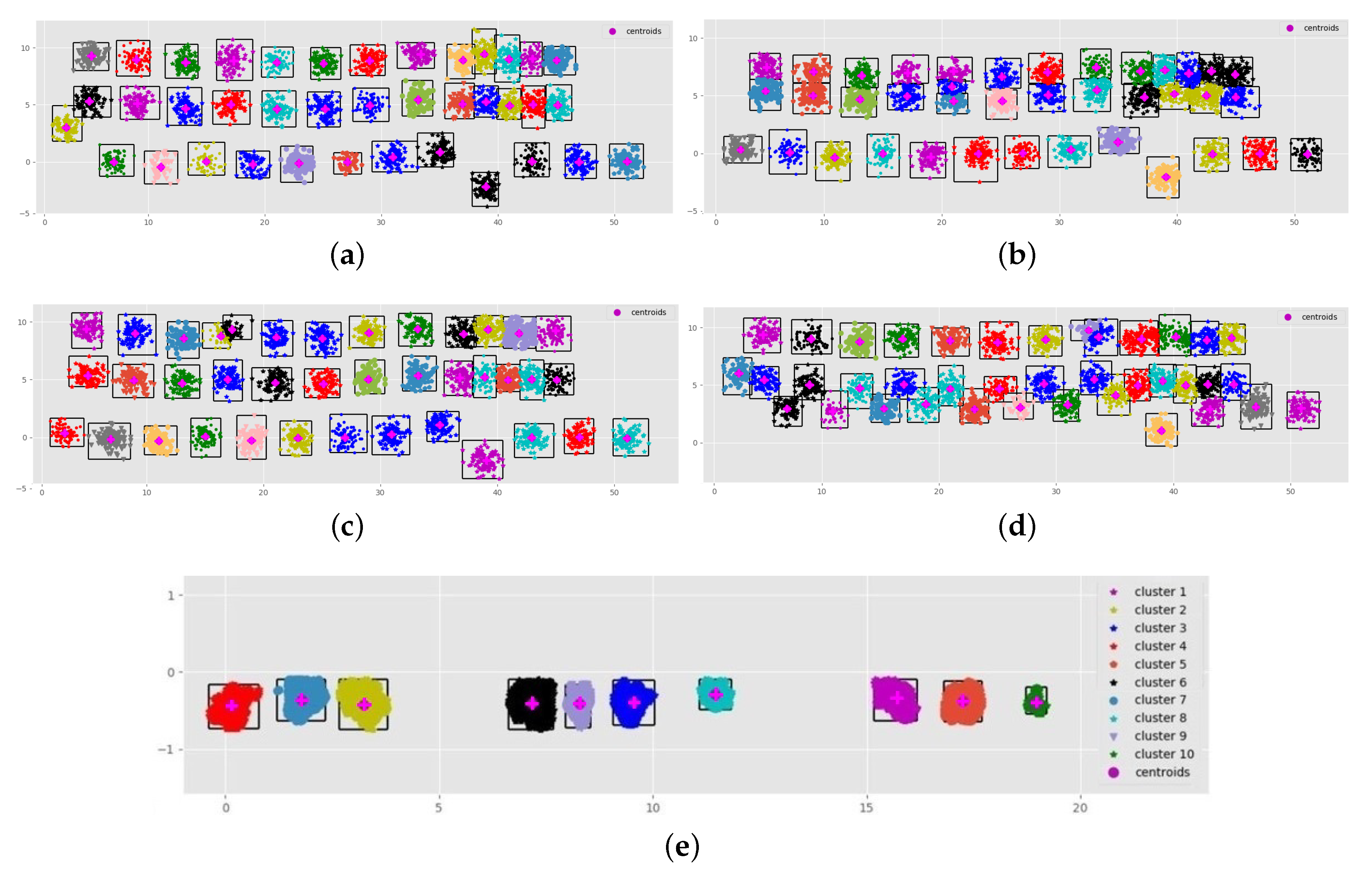
3.1. Geometrical Parameters Extraction from Point Cloud Plants
3.2. Features Extraction from Point Clouds
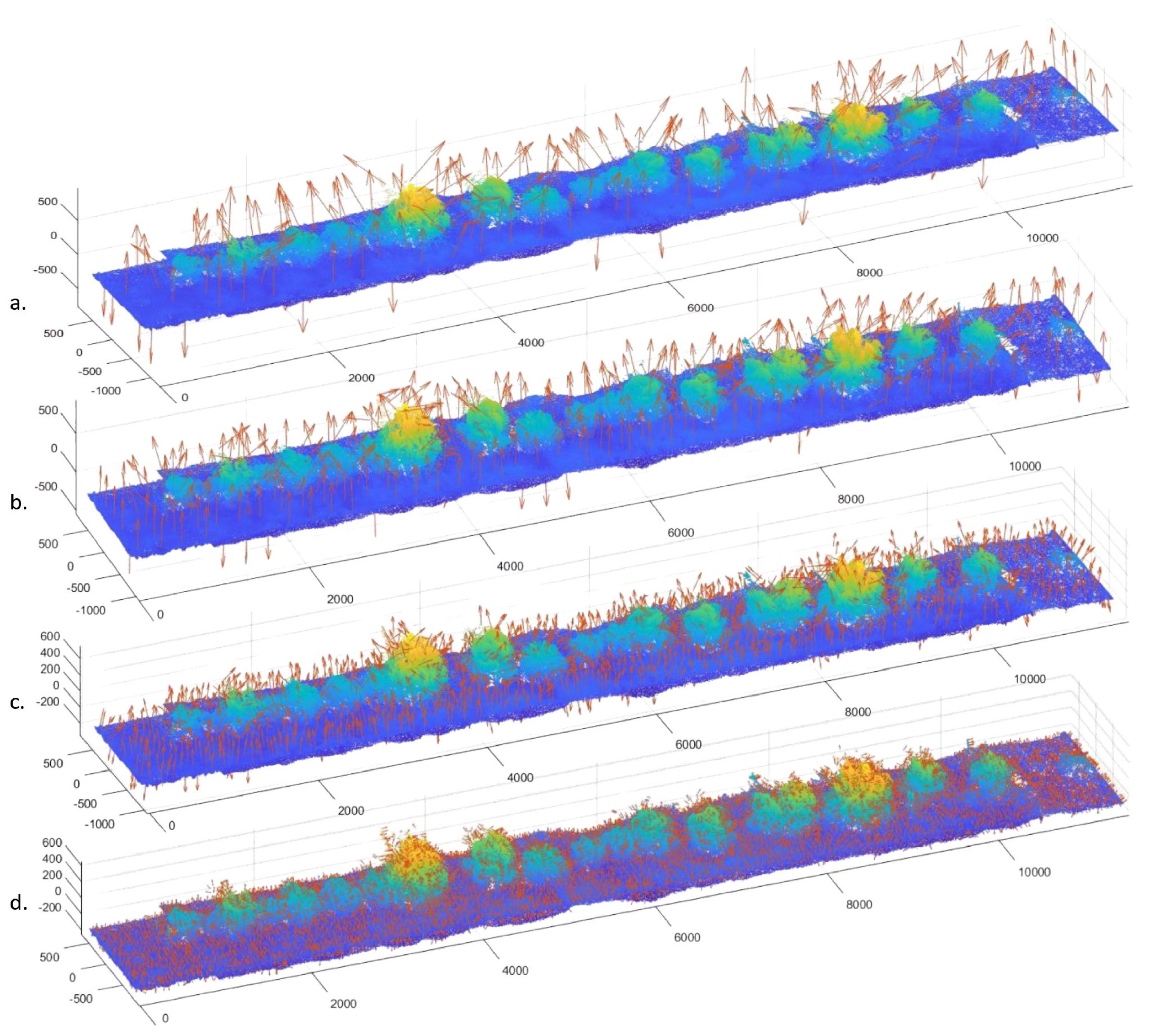
3.2.1. Normals Extraction
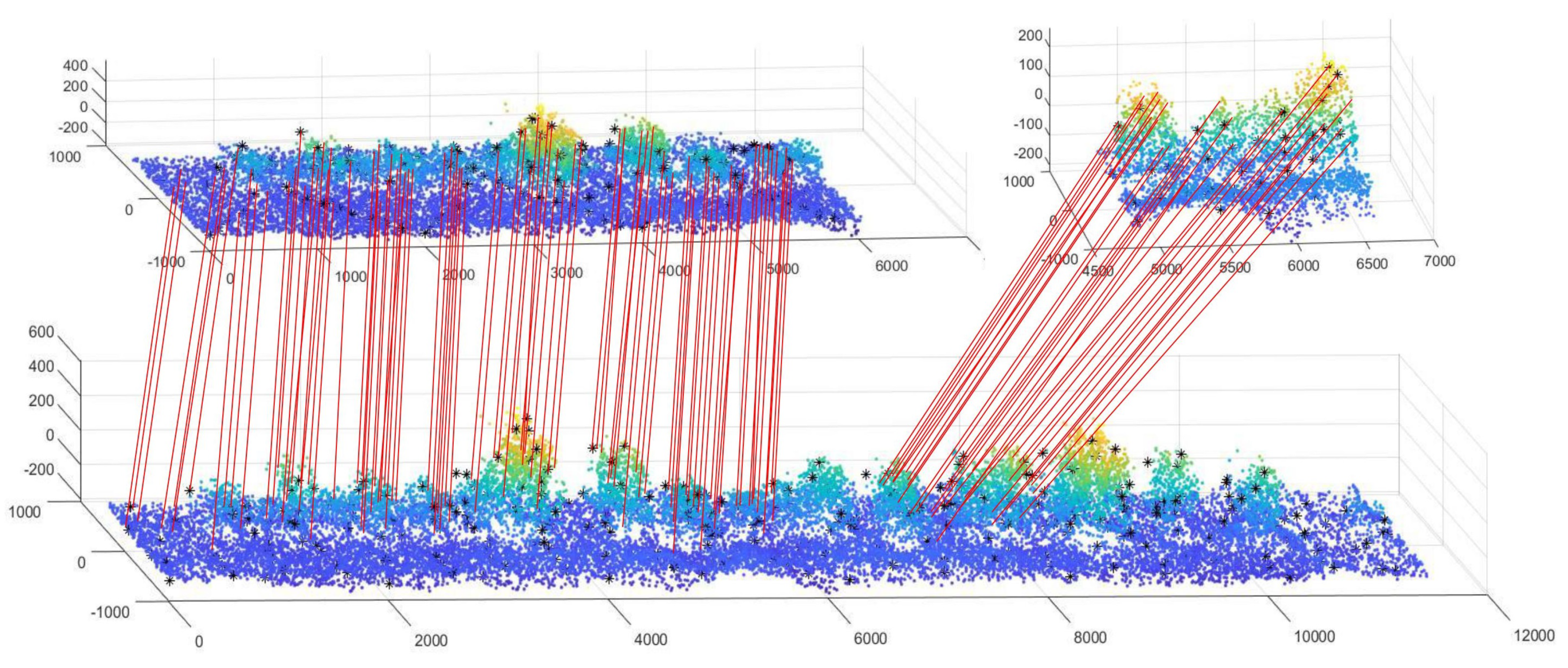
3.2.2. Key Points Extraction and Matching
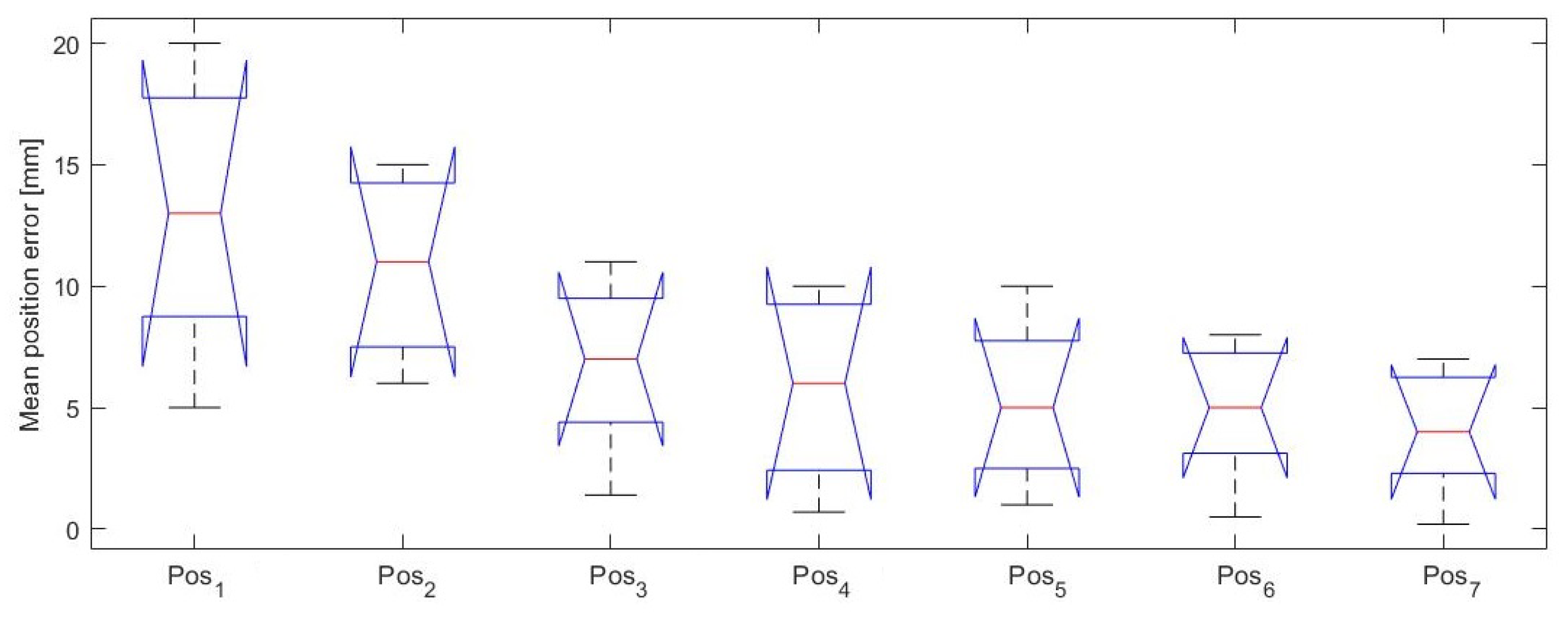
3.3. Localisation Test
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| L-PC | Local Point Cloud |
| PCL | Point Cloud Library |
| G-PC | General Point Cloud |
| ROS | Robot Operating System |
| RVIZ | ROS Visualization |
Appendix A
References
- Cranfield, J.A.L. Framing consumer food demand responses in a viral pandemic. Can. J. Agric. Econ. Can. D’agroeconomie 2020, 68, 151–156. [Google Scholar] [CrossRef]
- Ritson, C. Population Growth and Global Food Supplies. In Food Education and Food Technology in School Curricula: International Perspectives; Springer International Publishing: Cham, Switzerland, 2020; pp. 261–271. [Google Scholar]
- Pachapur, P.K.; Pachapur, V.L.; Brar, S.K.; Galvez, R.; Le Bihan, Y.; Surampalli, R.Y. Food Security and Sustainability. In Sustainability; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2020; Chapter 17; pp. 357–374. [Google Scholar]
- Srivasta, R.K. Influence of Sustainable Agricultural Practices on Healthy Food Cultivation. In Environmental Biotechnology Vol. 2; Springer International Publishing: Cham, Switzerland, 2020; pp. 95–124. [Google Scholar]
- Rendon, P.; Steinhoff-Knopp, B.; Saggau, P.; Burkhard, B. Assessment of the relationships between agroecosystem condition and soil erosion regulating ecosystem service in Northern Germany. bioRxiv 2020. [Google Scholar] [CrossRef]
- Silva, V.; Yang, X.; Fleskens, L.; Ritsema, C.; Geissen, V. Soil contamination by pesticide residues—what and how much should we expect to find in EU agricultural soils based on pesticide recommended uses? Sci. Total Environ. 2019, 653, 1532–1545. [Google Scholar] [CrossRef]
- Fernandes, C.L.F.; Volcão, L.M.; Ramires, P.F.; Moura, R.R.D.; Da Silva Júnior, F.M.R. Distribution of pesticides in agricultural and urban soils of Brazil: A critical review. Environ. Sci. Process. Impacts 2020, 22, 256–270. [Google Scholar] [CrossRef] [PubMed]
- Tarla, D.N.; Erickson, L.E.; Hettiarachchi, G.M.; Amadi, S.I.; Galkaduwa, M.; Davis, L.C.; Nurzhanova, A.; Pidlisnyuk, V. Phytoremediation and Bioremediation of Pesticide-Contaminated Soil. Appl. Sci. 2020, 10, 1217. [Google Scholar] [CrossRef] [Green Version]
- Majoro, F.; Wali, U.G.; Munyaneza, O.; Naramabuye, F.X.; Mukamwambali, C. On-site and Off-site Effects of Soil Erosion: Causal Analysis and Remedial Measures in Agricultural Land—A Review. Rwanda J. Eng. Sci. Technol. Environ. 2020, 3. [Google Scholar] [CrossRef]
- Asociación Española Agricultura de Conservación Suelos Vivos. Situación Actual de la Agricultura de Conservación en España. Available online: https://www.interempresas.net/Agricola/Articulos/126980-Situacion-actual-de-la-agricultura-de-conservacion-en-Espana.html (accessed on 27 August 2020).
- Loures, L.; Chamizo, A.; Ferreira, P.; Loures, A.; Castanho, R.; Panagopoulos, T. Assessing the Effectiveness of Precision Agriculture Management Systems in Mediterranean Small Farms. Sustainability 2020, 12, 3765. [Google Scholar] [CrossRef]
- Poblete-Echeverría, C.; Fuentes, S. Editorial: Special Issue “Emerging Sensor Technology in Agriculture”. Sensors 2020, 20, 3827. [Google Scholar] [CrossRef]
- Singh, R.K.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN Technology for Precision Agriculture in Greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef] [Green Version]
- Cubero, S.; Marco-Noales, E.; Aleixos, N.; Barbé, S.; Blasco, J. RobHortic: A Field Robot to Detect Pests and Diseases in Horticultural Crops by Proximal Sensing. Agriculture 2020, 10, 276. [Google Scholar] [CrossRef]
- Moysiadis, V.; Tsolakis, N.; Katikaridis, D.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Mobile Robotics in Agricultural Operations: A Narrative Review on Planning Aspects. Appl. Sci. 2020, 10, 3453. [Google Scholar] [CrossRef]
- Fue, K.G.; Porter, W.M.; Barnes, E.M.; Rains, G.C. An Extensive Review of Mobile Agricultural Robotics for Field Operations: Focus on Cotton Harvesting. AgriEngineering 2020, 2, 150–174. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Naqvi, S.H.A.; Khan, S.H.; Farhan, M. An Intelligent Autonomous Robotic System for Precision Farming. In Proceedings of the 2020 3rd International Conference on Intelligent Autonomous Systems (ICoIAS), Singapore, 26–29 February 2020; pp. 133–139. [Google Scholar]
- Cofund, C.O. Sureveg Project. Available online: https://projects.au.dk/coreorganiccofund/core-organic-cofund-projects/sureveg/ (accessed on 27 August 2020).
- Hernández-Pajares, M.; Moreno-Borràs, D. Real-Time Detection, Location, and Measurement of Geoeffective Stellar Flares From Global Navigation Satellite System Data: New Technique and Case Studies. Space Weather 2020, 18, e2020SW002441. [Google Scholar] [CrossRef] [Green Version]
- Pradhan, C.; Mohapatra, K.K.; Saren, S. GPS based sampling for determination of fertility status of some villages of Jatani block of khordha district, Odisha. IJCS 2020, 8, 2980–2984. [Google Scholar] [CrossRef]
- Kulkarni, A.A.; Dhanush, P.; Chetan, B.S.; Gowda, C.S.T.; Shrivastava, P.K. Applications of Automation and Robotics in Agriculture Industries A Review. IOP Conf. Ser. Mater. Sci. Eng. 2020, 748, 012002. [Google Scholar] [CrossRef]
- Sharifi, M.; Meenken, E.; Hall, B.; Espig, M.; Finlay-Smits, S.; Wheeler, D. Importance of Measurement and Data Uncertainty in a Digitally Enabled Agriculture System. In Nutrient Management in Farmed Landscapes; Farmed Landscapes Research Centre, Massey University: Palmerston North, New Zealand, 2020. [Google Scholar]
- Zhang, Q.; Li, S.; Xu, Z.; Niu, X. Velocity-Based Optimization-Based Alignment (VBOBA) of Low-End MEMS IMU/GNSS for Low Dynamic Applications. IEEE Sens. J. 2020, 20, 5527–5539. [Google Scholar] [CrossRef]
- Miletiev, R.; Kapanakov, P.; Iontchev, E.; Yordanov, R. High sampling rate IMU with dual band GNSS receiver. In Proceedings of the 2020 43rd International Spring Seminar on Electronics Technology (ISSE), Demanovska Valley, Slovakia, 13–17 May 2020; pp. 1–5. [Google Scholar]
- Fu, L.; Gao, F.; Wu, J.; Li, R.; Karkee, M.; Zhang, Q. Application of consumer RGB-D cameras for fruit detection and localization in field: A critical review. Comput. Electron. Agric. 2020, 177, 105687. [Google Scholar] [CrossRef]
- Singh, P.; Kaur, A.; Nayyar, A. Role of Internet of Things and image processing for the development of agriculture robots. In Swarm Intelligence for Resource Management in Internet of Things; Elsevier: Amsterdam, The Netherlands, 2020; pp. 147–167. [Google Scholar]
- Zong, Z.; Liu, G.; Zhao, S. Real-Time Localization Approach for Maize Cores at Seedling Stage Based on Machine Vision. Agronomy 2020, 10, 470. [Google Scholar] [CrossRef] [Green Version]
- Aghi, D.; Mazzia, V.; Chiaberge, M. Local Motion Planner for Autonomous Navigation in Vineyards with a RGB-D Camera-Based Algorithm and Deep Learning Synergy. Machines 2020, 8, 27. [Google Scholar] [CrossRef]
- Fariña, B.; Toledo, J.; Estevez, J.I.; Acosta, L. Improving Robot Localization Using Doppler-Based Variable Sensor Covariance Calculation. Sensors 2020, 20, 2287. [Google Scholar] [CrossRef] [Green Version]
- Zhao, D.; Whittaker, W. High Precision In-Pipe Robot Localization with Reciprocal Sensor Fusion. arXiv 2020, arXiv:2002.12408. [Google Scholar]
- Szaj, W.; Pieniazek, J. Vehicle localization using laser scanner. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22 June–5 July 2020; pp. 588–593. [Google Scholar]
- Vora, A.; Agarwal, S.; Pandey, G.; McBride, J. Aerial Imagery based LIDAR Localization for Autonomous Vehicles. arXiv 2020, arXiv:2003.11192. [Google Scholar]
- de Miguel, M.Á.; García, F.; Armingol, J.M. Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS. Sensors 2020, 20, 3145. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Shen, Y.; Cai, B.; Saleem, M.T. A Brief Review on Loop Closure Detection with 3D Point Cloud. In Proceedings of the 2019 IEEE International Conference on Real-time Computing and Robotics (RCAR), Irkutsk, Russia, 4–9 August 2019; pp. 929–934. [Google Scholar]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Fu, W.; Liu, R.; Wang, H.; Ali, R.; He, Y.; Cao, Z.; Qin, Z. A Method of Multiple Dynamic Objects Identification and Localization Based on Laser and RFID. Sensors 2020, 20, 3948. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Hoover, R.C.; McGough, J.S. Mobile Fiducial-Based Collaborative Localization and Mapping (CLAM). In Proceedings of the USCToMM Symposium on Mechanical Systems and Robotics, Rapid City, SD, USA, 14–16 May 2020; pp. 196–205. [Google Scholar]
- Yu, H.; Zhen, W.; Yang, W.; Scherer, S. Line-based 2D-3D Registration and Camera Localization in Structured Environments. IEEE Trans. Instrum. Meas. 2020, 69, 8962–8972. [Google Scholar] [CrossRef]
- Alves, R.C.; de Morais, J.S.; Yamanaka, K. Cost-effective Indoor Localization for Autonomous Robots using Kinect and WiFi Sensors. Intel. Artif. 2020, 23, 33–55. [Google Scholar]
- Barnes, E.; Moran, M.; Pinter, P., Jr.; Clarke, T. Multispectral remote sensing and site-specific agriculture: Examples of current technology and future possibilities. In Proceedings of the Third International Conference on Precision Agriculture, Minneapolis, MN, USA, 23–26 May 1996; pp. 845–854. [Google Scholar]
- Huang, Y.; Thomson, S.J.; Lan, Y.; Maas, S.J. Multispectral imaging systems for airborne remote sensing to support agricultural production management. Int. J. Agric. Biol. Eng. 2010, 3, 50–62. [Google Scholar]
- Cardim Ferreira Lima, M.; Krus, A.; Valero, C.; Barrientos, A.; Del Cerro, J.; Roldán-Gómez, J.J. Monitoring Plant Status and Fertilization Strategy through Multispectral Images. Sensors 2020, 20, 435. [Google Scholar] [CrossRef] [Green Version]
- Krus, A.; van Apeldoorn, D.; Montoro, J.J.R.; Ubierna, C.V. Acquiring plant features with optical sensing devices in an organic strip-cropping system. In Proceedings of the 12th European Conference on Precision Agriculture, Técnicas Avanzadas en Agroalimentación LPF-TAGRALIA, Montpellier, France, 8–11 July 2019; Volume 1, pp. 104–105. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Pham, D.; Otri, S.; Afify, A.; Mahmuddin, M.; Al-Jabbouli, H. Data clustering using the bees algorithm. In Proceedings of the 40th CIRP International Manufacturing Systems Seminar, Liverpool, UK, 30 May–1 June 2007. [Google Scholar]
- Qi, J.; Yu, Y.; Wang, L.; Liu, J.; Wang, Y. An effective and efficient hierarchical K-means clustering algorithm. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717728627. [Google Scholar] [CrossRef] [Green Version]
- Ding, C.; He, X. K-Means Clustering via Principal Component Analysis. In Proceedings of the Twenty-First, International Conference on Machine Learning, ICML ’04, Banff, AB, Canada, 4–8 July 2004; Association for Computing Machinery: New York, NY, USA, 2004; p. 29. [Google Scholar]
- El Agha, M.; Ashour, W.M. Efficient and fast initialization algorithm for k-means clustering. Effic. Fast Initial. Algorithm K-Means Clust. 2012, 4, 21–31. [Google Scholar] [CrossRef]
- Scarlatache, F.; Grigoraş, G.; Chicco, G.; Cârţină, G. Using k-means clustering method in determination of the optimal placement of distributed generation sources in electrical distribution systems. In Proceedings of the 2012 13th International Conference on Optimization of Electrical and Electronic Equipment (OPTIM), Brasov, Romania, 24–26 May 2012; pp. 953–958. [Google Scholar]
- Martin, A.; Barrientos, A.; del Cerro, J. The natural-CCD algorithm, a novel method to solve the inverse kinematics of hyper-redundant and soft robots. Soft Robot. 2018, 5, 242–257. [Google Scholar] [CrossRef] [PubMed]
- Ning, X.; Li, F.; Tian, G.; Wang, Y. An efficient outlier removal method for scattered point cloud data. PLoS ONE 2018, 13, e0201280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rusu, R.; Blodow, N.; Marton, Z.; Soos, A.; Beetz, M. Towards 3D Object Maps for Autonomous Household Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3191–3198. [Google Scholar]
- Shi, X.; Peng, J.; Li, J.; Yan, P.; Gong, H. The Iterative Closest Point Registration Algorithm Based on the Normal Distribution Transformation. Procedia Comput. Sci. 2019, 147, 181–190. [Google Scholar] [CrossRef]
- Magnusson, M.; Duckett, T. A comparison of 3D registration algorithms for autonomous underground mining vehicles. In Proceedings of the European Conference on Mobile Robotics (ECMR 2005, Italy), Ancona, Italy, 7–10 September 2005; pp. 86–91. [Google Scholar]
- Hänsch, R.; Weber, T.; Hellwich, O. Comparison of 3D interest point detectors and descriptors for point cloud fusion. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 57. [Google Scholar] [CrossRef] [Green Version]
- Buyuksalih, I.; Bayburt, S.; Buyuksalih, G.; Baskaraca, A.; Karim, H.; Rahman, A.A. 3D Modelling and Visualization Based on the Unity Game Engine–Advantages and Challenges. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 4, 161. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Amount | Description |
|---|---|---|
| Robot Igus CPR 5 DOF | 1 | Actuator |
| Lidar (SICK AG) | 3 | 2D Laser sensor |
| Parrot Sequoia | 1 | Multi-spectral camera |
| User interface | 1 | ROS Central Core |
| Control box | 1 | Electrical system |
| Cluster | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Radio (cm) | 51 | 53 | 49 | 53 | 51 | 55 | 54 | 42 | 48 | 39 |
| X pos (cm) | 1610 | 380 | 920 | 20 | 1720 | 740 | 240 | 1190 | 810 | 1850 |
| Y pos (cm) | −39 | −51 | −41 | −40 | −38 | −39 | −37 | −30 | −39 | −36 |
| Height (cm) | 40 | 41 | 39 | 44 | 42 | 45 | 44 | 39 | 41 | 40 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cruz Ulloa, C.; Krus, A.; Barrientos, A.; Del Cerro, J.; Valero, C. Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields. Agronomy 2021, 11, 11. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy11010011
Cruz Ulloa C, Krus A, Barrientos A, Del Cerro J, Valero C. Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields. Agronomy. 2021; 11(1):11. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy11010011
Chicago/Turabian StyleCruz Ulloa, Christyan, Anne Krus, Antonio Barrientos, Jaime Del Cerro, and Constantino Valero. 2021. "Robotic Fertilisation Using Localisation Systems Based on Point Clouds in Strip-Cropping Fields" Agronomy 11, no. 1: 11. https://0-doi-org.brum.beds.ac.uk/10.3390/agronomy11010011