Quality Assessment of Tire Shearography Images via Ensemble Hybrid Faster Region-Based ConvNets

 , , ,
, , ,  and
and
Abstract
:1. Introduction
- The substantial contribution of this work lies in improving the architecture established earlier in [13] for effectively realizing intelligent tire manufacturing with automated defects detection.
- A Faster Region-based convolutional neural networks (R-CNN) is combined along with the architecture described in [13] for minimizing the false positive ratio.
- Further, this significant modification to the CNN architecture helps in minimizing the labor cost involved in the tire manufacturing industry.
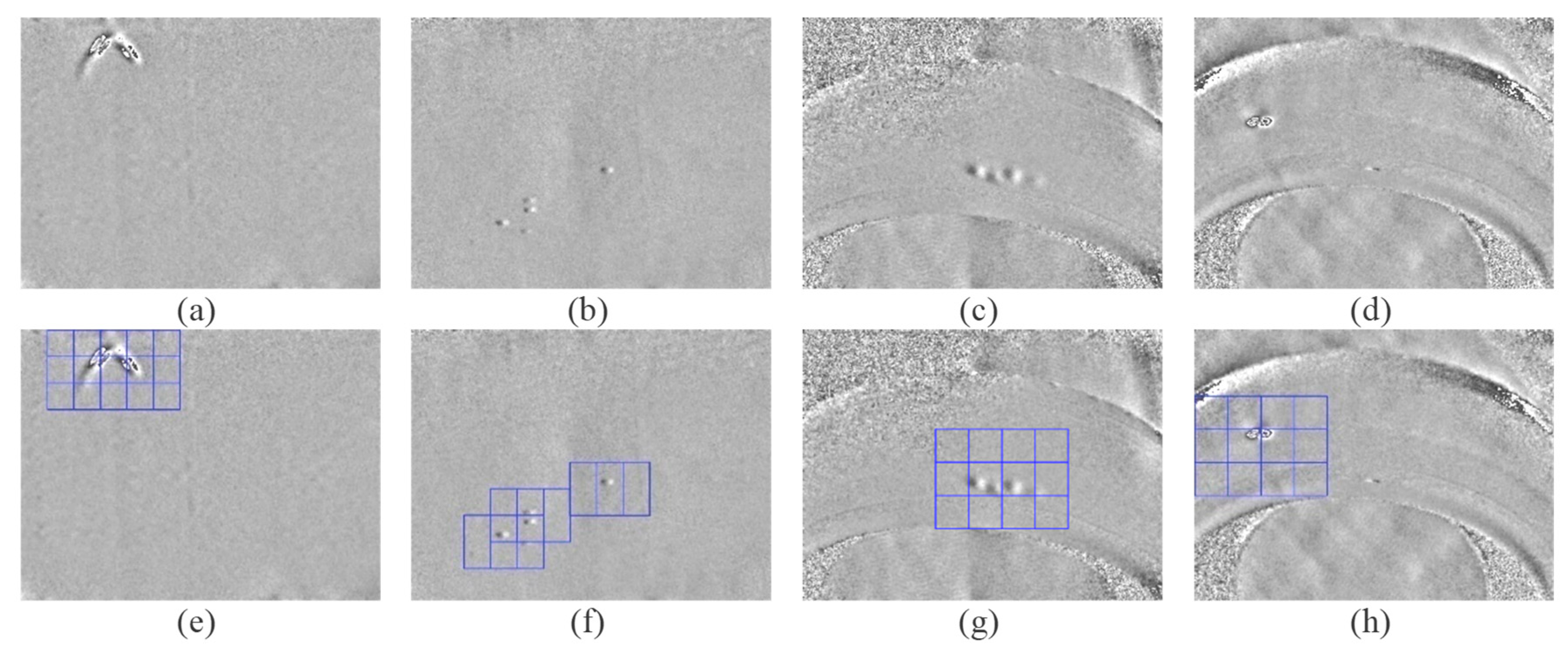
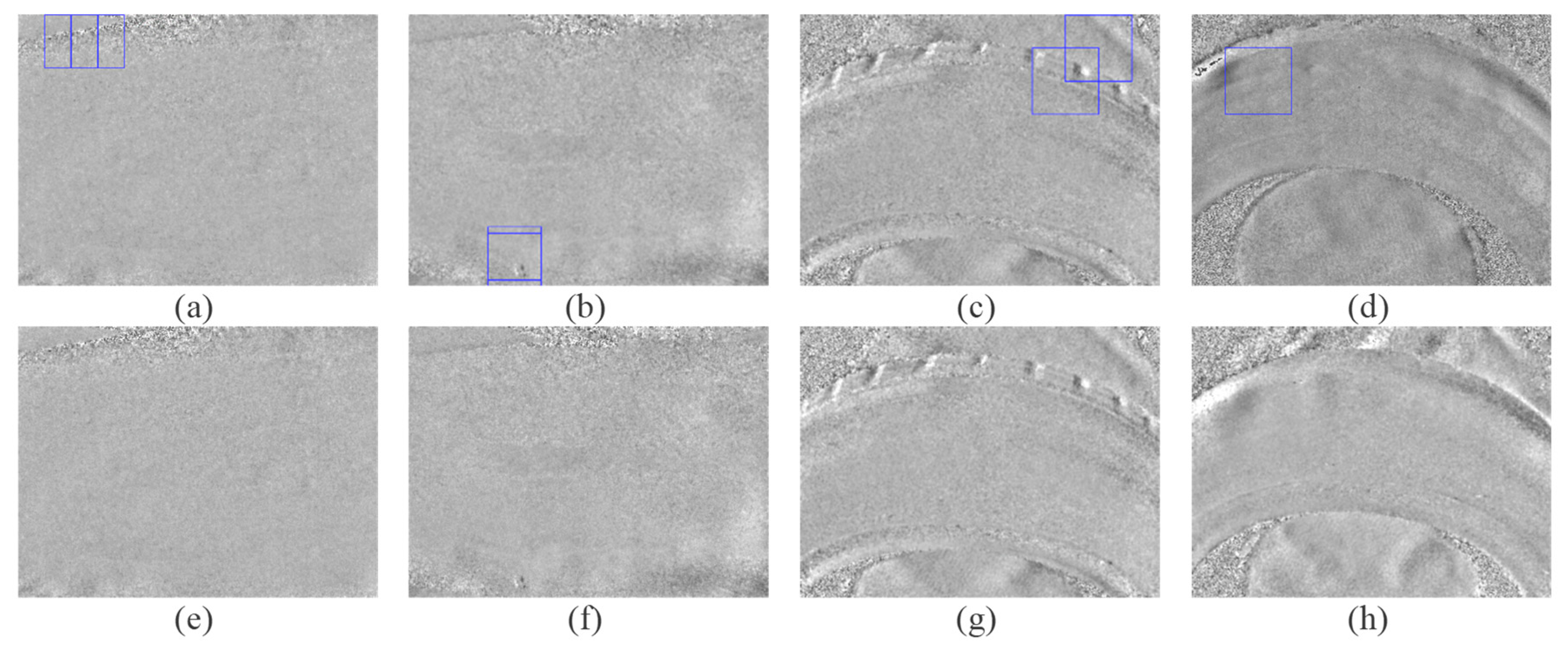
- The results of the proposed hybrid model indicate that this approach asserts a hundred percent detection of bubble defects in the tire shearography images.
- From the results, it can be perceived that the false alarm ratio can be minimized to 18 percent.
2. Materials and Methods
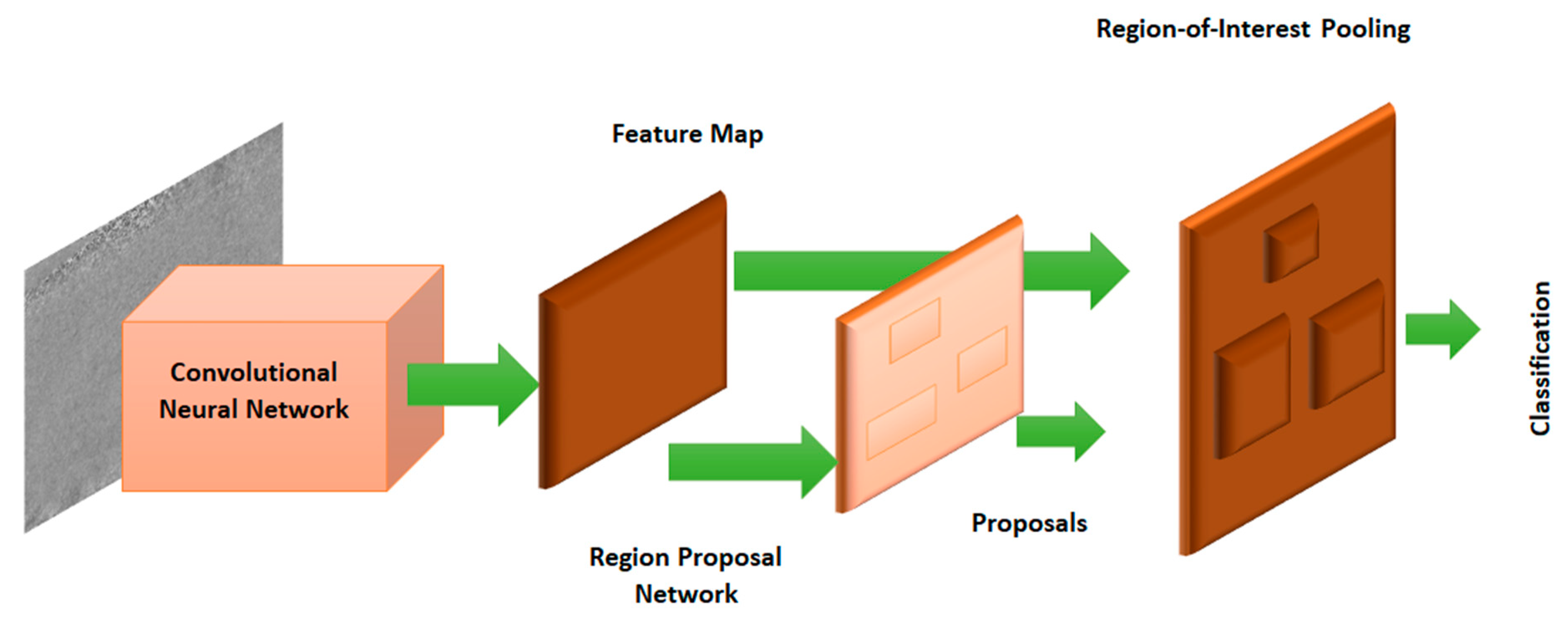
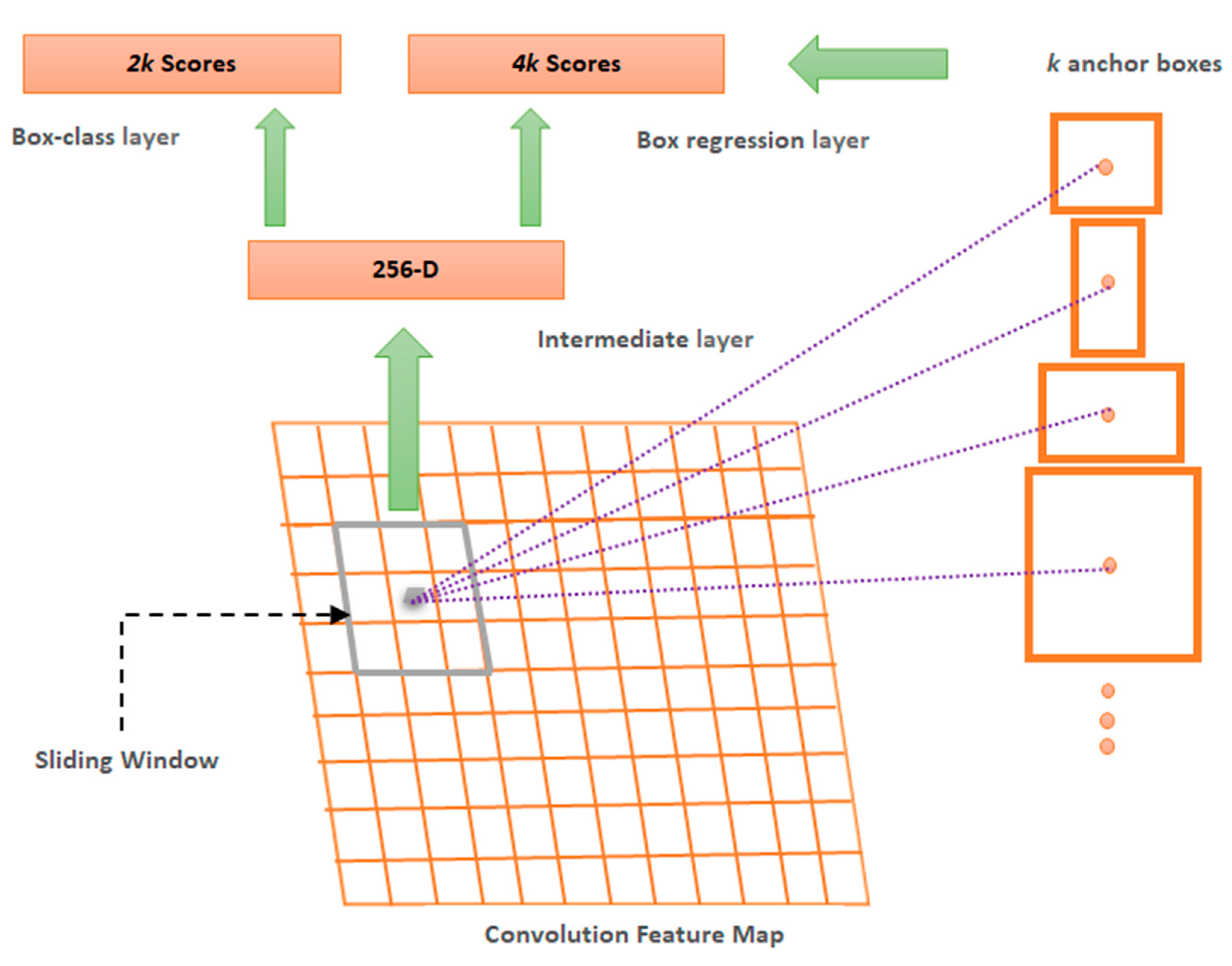
2.1. Faster Region-Based Convolutional Neural Networks
2.2. Image Enhancement
2.3. Classification of the Bubble Defects in Tires
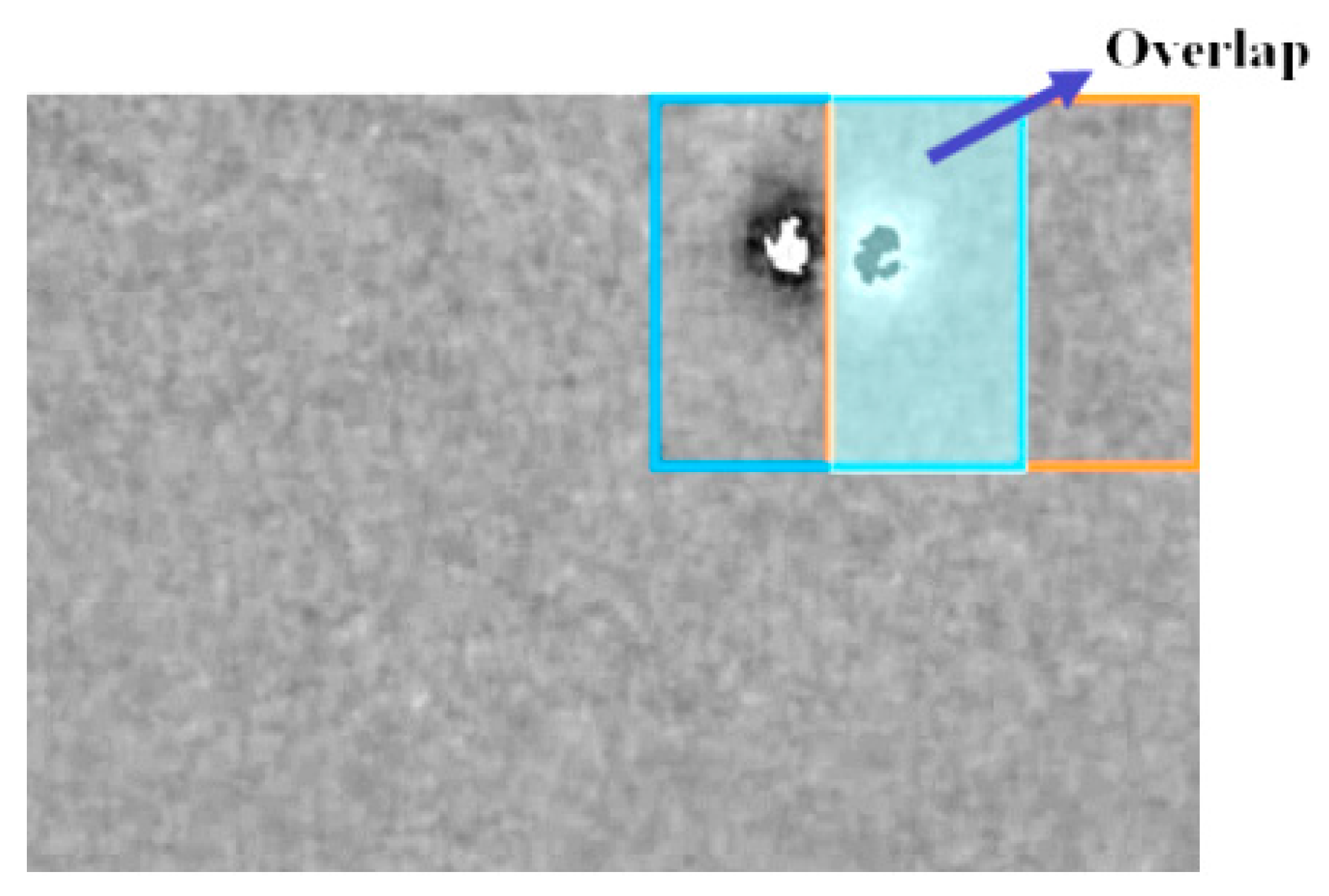
2.4. The Sliding Window Phase
3. Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lelli, F. Interoperability of the Time of Industry 4.0 and the Internet of Things. Future Internet 2019, 11, 36. [Google Scholar] [CrossRef] [Green Version]
- Kathiravan, S.; Kanakaraj, J. A Review on Potential Issues and Challenges in MR Imaging. Sci. World J. 2013, 2013, 783715. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, Q.; Dan, X.; Sun, F.; Wang, Y.; Wu, S.; Yang, L. Digital Shearography for NDT: Phase Measurement Technique and Recent Developments. Appl. Sci. 2018, 8, 2662. [Google Scholar] [CrossRef] [Green Version]
- Lopato, P. Double-Sided Terahertz Imaging of Multilayered Glass Fiber-Reinforced Polymer. Appl. Sci. 2017, 7, 661. [Google Scholar] [CrossRef] [Green Version]
- Steinchen, W.; Yang, L. Digital Shearography: Theory and Application of Digital Speckle Pattern Shearing Interferometry; SPIE Press: Bellingham, WA, USA, 2003. [Google Scholar]
- Sun, F.; Wang, Y.; Yan, P.; Zhao, Q.; Yang, L. The application of SLM in shearography detecting system. Opt. Lasers Eng. 2019, 114, 90–94. [Google Scholar] [CrossRef]
- Ye, Y.; Ma, K.; Zhou, H.; Arola, D.; Zhang, D. An automated shearography system for cylindrical surface inspection. Measurement 2019, 135, 400–405. [Google Scholar] [CrossRef]
- Wang, R.; Guo, Q.; Lu, S.; Zhang, C. Tire Defect Detection Using Fully Convolutional Network. IEEE Access 2019, 7, 43502–43510. [Google Scholar] [CrossRef]
- Fröhlich, H.B.; Fantin, A.V.; de Oliveira, B.C.F.; Willemann, D.P.; Iervolino, L.A.; Benedet, M.E.; Jnior, A.A.G. Defect classification in shearography images using convolutional neural networks. In Proceedings of the 2018 International Joint Conference on Neural Networks (IJCNN), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–7. [Google Scholar]
- Cui, X.; Liu, Y.; Zhang, Y.; Wang, C. Tire defects classification with multi-contrast convolutional neural networks. Int. J. Pattern Recognit. Artif. Intell. 2018, 32, 1850011. [Google Scholar] [CrossRef]
- Srinivasan, K.; Sharma, V.; Jayakody, D.N.K.; Vincent, D.R. D-ConvNet: Deep learning model for enhancement of brain MR images. Basic Clin. Pharmacol. Toxicol. 2018, 124, 3–4. [Google Scholar]
- Srinivasan, K.; Ankur, A.; Sharma, A. Super-resolution of Magnetic Resonance Images using deep Convolutional Neural Networks. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics—Taiwan (ICCE-TW), Taipei, Taiwan, 12–14 June 2017; pp. 41–42. [Google Scholar] [CrossRef]
- Chang, C.-Y.; Huang, J.-K. Tires Defects Detection Using Convolutional Neural Networks. In Proceedings of the 2017 International Conference on Visualization, Graphics and Image Processing (CVGIP), Nantou, Taiwan, 21–23 August 2017. [Google Scholar]
- Chang, C.-Y.; Wang, W.-C. Integration of CNN and Faster R-CNN for Tire Bubble Defects Detection. In Proceedings of the 13th International Conference on Broadband and Wireless Computing, Communication and Applications (BWCCA-2018), Taichung, Taiwan, 27–29 October 2018. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Washington, DC, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast R-CNN. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Washington, DC, USA, 7–13 December 2015; pp. 1440–1448. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Uijlings, J.R.; van de Sande, K.E.; Gevers, T.; Smeulders, A.W. Selective search for object recognition. Int. J. Comput. Vis. 2013, 104, 154–171. [Google Scholar] [CrossRef] [Green Version]
- Matthew, D.Z.; Fergus, R. Visualizing and understanding convolutional neural networks. In Proceedings of the 13th European Conference Computer Vision and Pattern Recognition, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Everingham, M.; Van Gool, L.; Christopher, K.I.; Williams, J.W.; Zisserman, A. The PASCAL Visual Object Classes(VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector Networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Freund, Y.; Robert, E.; Shapire, A. Decision-Theoretic Generalization of On-Line Learning and an Application to Boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Zou, D.; Feng, L.; Feng, S.; Fu, P.; Li, J. An FPGA-Based CNN Accelerator Integrating Depthwise Separable Convolution. Electronics 2019, 8, 281. [Google Scholar] [CrossRef] [Green Version]
- Sinha, R.S.; Hwang, S.-H. Comparison of CNN Applications for RSSI-Based Fingerprint Indoor Localization. Electronics 2019, 8, 989. [Google Scholar] [CrossRef] [Green Version]
- Rivera-Acosta, M.; Ortega-Cisneros, S.; Rivera, J. Automatic Tool for Fast Generation of Custom Convolutional Neural Networks Accelerators for FPGA. Electronics 2019, 8, 641. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Zhao, E.; Zhang, J.; Hu, C. Detection of Wildfire Smoke Images Based on a Densely Dilated Convolutional Network. Electronics 2019, 8, 1131. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Shen, J.; Wen, M.; Zhang, C. Efficient Implementation of 2D and 3D Sparse Deconvolutional Neural Networks with a Uniform Architecture on FPGAs. Electronics 2019, 8, 803. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
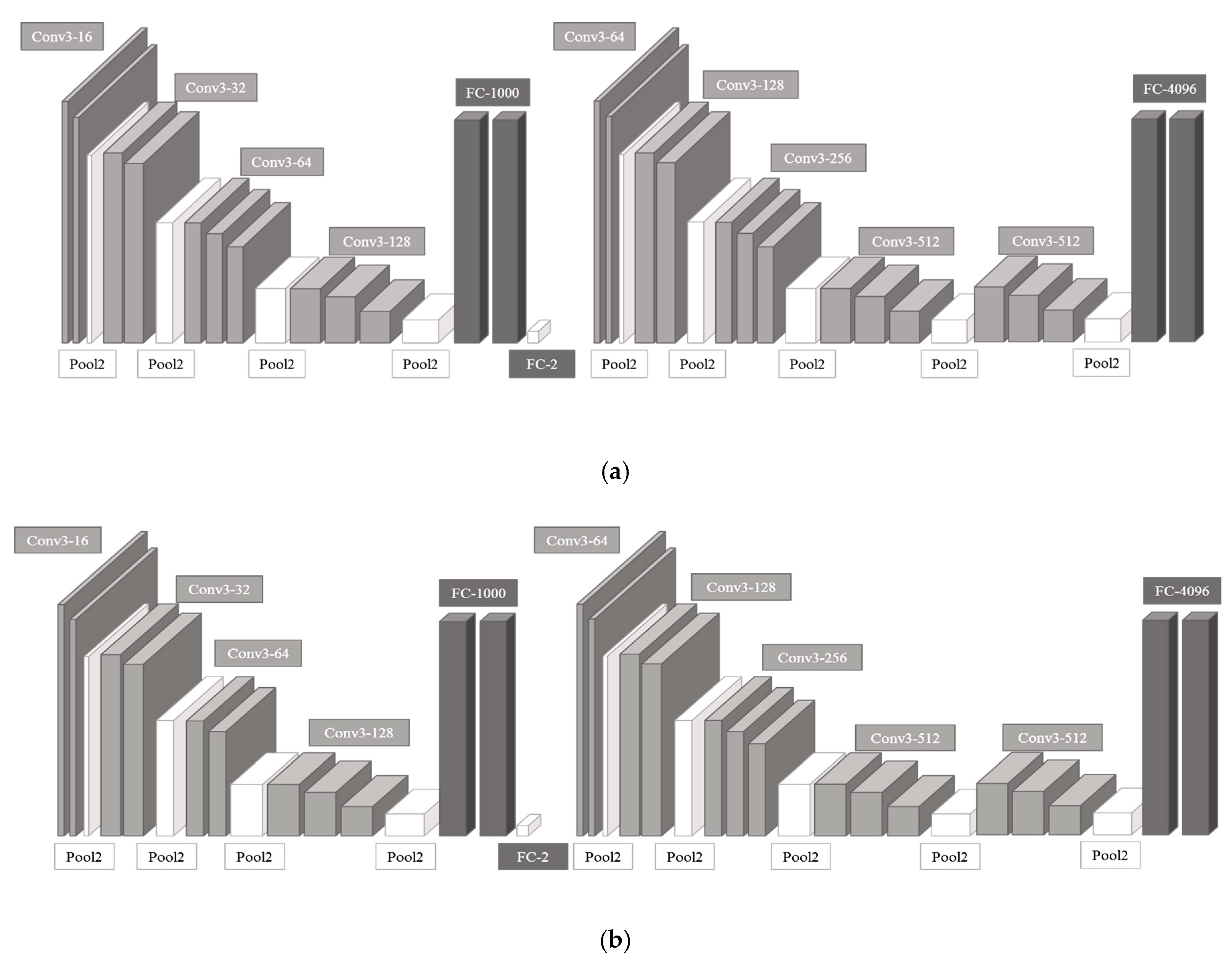
| Convolutional Neural Networks | |
|---|---|
| (a) Tread of Tires | (b) Sidewall of Tires |
| ConvNet3-16 ConvNet3-16 | ConvNet3-16 ConvNet3-16 |
| Max-pooling process | |
| ConvNet3-32 ConvNet3-32 | ConvNet3-32 ConvNet3-32 |
| Max-pooling process | |
| ConvNet3-64 ConvNet3-64 | ConvNet3-64 ConvNet3-64 ConvNet3-64 |
| Max-pooling process | |
| ConvNet3-128 ConvNet3-128 ConvNet3-128 | ConvNet3-128 ConvNet3-128 ConvNet3-128 |
| Max-pooling process | |
| Fully Connected-1000 | |
| Fully Connected-1000 | |
| Fully Connected-2 | |
| Softargmax function | |
| Faster Region-based Convolutional Neural Networks | |
| ConvNet3-64 ConvNet3-64 | |
| Max-pooling Process | |
| ConvNet3-128 ConvNet3-128 | |
| Max-pooling Process | |
| ConvNet3-256 ConvNet3-256 ConvNet3-256 | |
| Max-pooling Process | |
| ConvNet3-256 ConvNet3-256 ConvNet3-256 | |
| ConvNet3-512 ConvNet3-512 ConvNet3-512 | |
| ConvNet3-512 | |
| Reshape process | |
| Soft-max function | |
| Reshape process | |
| Proposal | |
| ROI pooling layer | |
| Full-connection | |
| Bbox_pred | Softmax function |
| Cls_prob | |
| Tire Treads | Tire Sidewalls | |||
|---|---|---|---|---|
| No. of Images | No. of Blocks | No. of Images | No. of Blocks | |
| Shearography without bubble | 1409 | 8811 | 1545 | 10514 |
| Shearography with bubbles | 223 | 8596 | 102 | 5052 |
| Tire Treads | Tire Sidewalls | |
|---|---|---|
| No. of Images | No. of Images | |
| Shearography without bubble | 262 | 279 |
| Shearography with bubbles | 136 | 120 |
| Original | Proposed Ensemble Hybrid Model | |
|---|---|---|
| Ratios | [0.5,1,2] | [0.3,0.4,0.5,0.75] |
| Scale | [8,16,32] | [8,16,32] |
| Measurement Methods | Accuracy (%) | Sensitivity (%) | Specificity (%) |
|---|---|---|---|
| Support Vector Machine [23] | 55.53 | 92.65 | 36.26 |
| Random-Forest Model [24] | 59.3 | 96.32 | 40.08 |
| Haar-like Ada-Boost Method [25] | 62.81 | 97.06 | 45.04 |
| Integrated Model comprising of Support Vector Machine, Random-Forest Model, Ada-Boost Method | 79.15 | 96.32 | 70.23 |
| Chang’s method [13] | 87.94 | 100 | 81.68 |
| Proposed Hybrid Faster Region-based Convolutional Neural Networks Model | 89.16 | 100 | 83.09 |
| Measurement Methods | Accuracy (%) | Sensitivity (%) | Specificity (%) |
|---|---|---|---|
| Support Vector Machine [23] | 50.13 | 81.67 | 36.56 |
| Random-Forest Model [24] | 44.61 | 85.83 | 26.88 |
| Haar-like Ada-Boost Method [25] | 46.37 | 82.5 | 30.82 |
| Integrated Model comprising of Support Vector Machine, Random-Forest Model, Ada-Boost Method | 61.9 | 85 | 51.97 |
| Chang’s method [13] | 85.46 | 100 | 79.21 |
| Proposed Hybrid Faster Region-based Convolutional Neural Networks Model | 86.87 | 100 | 80.15 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, C.-Y.; Srinivasan, K.; Wang, W.-C.; Ganapathy, G.P.; Vincent, D.R.; Deepa, N. Quality Assessment of Tire Shearography Images via Ensemble Hybrid Faster Region-Based ConvNets. Electronics 2020, 9, 45. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9010045
Chang C-Y, Srinivasan K, Wang W-C, Ganapathy GP, Vincent DR, Deepa N. Quality Assessment of Tire Shearography Images via Ensemble Hybrid Faster Region-Based ConvNets. Electronics. 2020; 9(1):45. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9010045
Chicago/Turabian StyleChang, Chuan-Yu, Kathiravan Srinivasan, Wei-Chun Wang, Ganapathy Pattukandan Ganapathy, Durai Raj Vincent, and N Deepa. 2020. "Quality Assessment of Tire Shearography Images via Ensemble Hybrid Faster Region-Based ConvNets" Electronics 9, no. 1: 45. https://0-doi-org.brum.beds.ac.uk/10.3390/electronics9010045