1.1. Context and Motivation
Currently, power system operators face numerous challenges that force them to revisit the conventional operational tools [
1]. These issues are mainly caused by the interconnection of multiple power networks [
2], the operation of power systems close to their operability limits [
3], the broad deployment of electronic devices [
4], or the massive integration of distributed generators [
5]. The Power-Flow (PF) is probably an essential computational tool in power system operation, control, optimization, and planning [
6]. In essence, PF involves solving a system of nonlinear equations that relate the nodal voltages with nodal power injections through the network. Due to the increasing size of power systems and stressful conditions frequently operated, conventional PF solvers may be unsuitable. For the sake of example, increasing loading conditions leads to ill-conditioned scenarios [
4] for which, according to Definition 1 below, traditional solvers such as the Newton–Raphson method (NR) fail. Therefore, it is clear that ill-conditioned cases suppose a challenge for most industrial tools in which the NR is the solver by default. In such cases, the tool may be unable to solve the system and some countermeasures would be needed.
Definition 1. Ill-conditioned PF case: solution of PF does exist; however, it is not reachable using NR and a flat start (e.g., load voltage magnitudes equal to 1 at PQ buses and all voltage angles equal to 0) [
7].
Although ill-conditioned cases are becoming more frequent [
3], well-conditioned ones are still the most common PF calculation scenario. So far, robust PF solvers that are usually used for ill-conditioned cases are quite inefficient [
8], making them unsuitable for most situations but necessary for addressing ill-conditioned cases. In this context, it is valuable to develop robust PF solvers with low computational complexity, suitable for both well and ill-conditioned cases. As seen in the Literature Review below, this kind of universal PF solver is relatively infrequent in the literature. This paper aims at contributing to this pool.
1.2. Literature Review
PF calculation has been widely studied by the industrial community since its first formulations based on Newton’s method [
9]. Rapidly, various authors focused their efforts on improving these first approaches. Some focused on developing second order-based methods [
10,
11], which used a second-order Taylor expansion instead of the common first-order truncation. This approach leads to a more accurate approximation of the PF state vector and, occasionally, to a more robust and reliable procedure. However, the high computational cost devoted to calculating the Hessian matrix of the PF equations showed that these kinds of solvers have overall received little attention in the literature.
Motivated by the high computational cost of calculating and factorizing the Jacobian matrix of the PF equations, some authors developed decoupled techniques [
12], dishonest Newton-like approaches [
13], and sparsity routines [
14]. Decoupled methods were amply used during the 1980s in transmission networks. However, this kind of method experienced convergence issues in stiff systems (high loading level and high R/X ratio) [
15], for which some robust approaches were explored [
16,
17]. Nevertheless, these methods have not been widely implanted in industry tools since their problems in stiff systems present difficulties in incorporating alternative formulations [
18].
Other references were focused on ill-conditioned cases. The first attempts were given by Iwamoto in [
19], who developed an optimal multiplier Newton-like method with wider convergence. This technique gained high popularity during 1980s, thus motivating various authors to propose further developments [
20,
21,
22]. The so-called Iwamoto’s method has been considered the benchmark robust PF solver. Nevertheless, it still suffers from some critical issues. On the one hand, the Iwamoto-like techniques present linear convergence, provoking a prolonged convergence rate. On the other hand, these methods tend to approach the PF solution very slowly, which may lead to local-trapping phenomena [
6].
Motivated by the issues experienced by the Iwamoto-like solvers, Milano discussed in [
7] the applicability of the Continuous Newton’s method for PF analysis. Under this framework, it is established that any numerical integration routine, e.g., the Runge–Kutta (RK) formulas [
23], can be considered as a benchmark for developing robust and efficient PF solvers. This was confirmed in [
7], where a robust PF solver was developed based on the 4th order RK formula. This novel technique notably outperforms Iwamoto’s solver in ill-conditioned cases. Motivated by these promising results, further developments have been recently explored, developing robust and efficient solvers based on the Adams–Bashforth methods [
24], the Bulirsch–Stoer algorithm [
25], and RK formulas [
26].
Other authors have addressed ill-conditioned cases by developing dynamic solution paradigms [
3,
27,
28,
29]. This approach consists of posing an artificial dynamic system whose equilibrium points correspond with the solution of the PF problem. This way, one can use any dynamic solution procedure for PF calculation. This solution framework is proven to have wider convergence than NR [
27]; however, as pointed out in [
3], this solution procedure supposes a very high computational effort, which hinders its applicability in large-scale networks.
Some authors have developed solution procedures based on optimization frameworks, solved using metaheuristic algorithms [
30,
31]. Although these techniques are not affected by numerical stability and ill-conditioned issues, they are highly inefficient because of the vast PF problems that must be solved to achieve a feasible solution.
Recently, high-order Newton-like (HONL) methods have gained popularity for PF analysis. This method has a higher convergence rate than NR, which is reflected in a lower number of iterations for converging. In [
32], the authors analyzed various HONL solvers with cubic, 4th, and 5th order convergence. In this case, results were promising, which motivates further developments and studies in [
33,
34,
35]. Nonetheless, this kind of solver must be further studied since, as shown in some recent works [
8], they might be inefficient or even numerically unstable.
In contrast to the most common PF formulation based on power mismatches, other works have proposed alternative schemes based on current injections [
36], d-q reference frame [
37], and complex notation [
38]. Although these approaches present some advantages concerning the conventional form, their applicability in ill-conditioned cases must be further studied since, as shown in [
39], some alternative formulations may degrade the conditioning of PF problems.
1.3. Contributions and Paper Organization
In the light of the review above, it is noted that that most of the available PF approaches or formulations are focused on either solving well- or ill-conditioned cases, but not both. In contrast, very few approaches might find wide applicability in both kinds of cases. On the other hand, it is noted that the methods based on the Continuous Newton’s framework are more accurate in solving the two types of problems efficiently. As shown in [
26], the PF solvers based on two-stage RK formulas present an acceptable computational cost, as only two Lower-Upper (LU) Jacobian decompositions are necessary for each iteration. Although it supposes almost doubling the computational cost of NR, their wider convergence may make them an attractive alternative to conventional solvers since, in contrast to other robust approaches, robustness is thus achieved without notably incrementing the computational cost of the solution procedure. This kind of solvers involves a set of parameters which, in previous works [
7,
26], were tuned by directly mimicking the numerical structure of the RK formulas, taking standard values for the parameters involved [
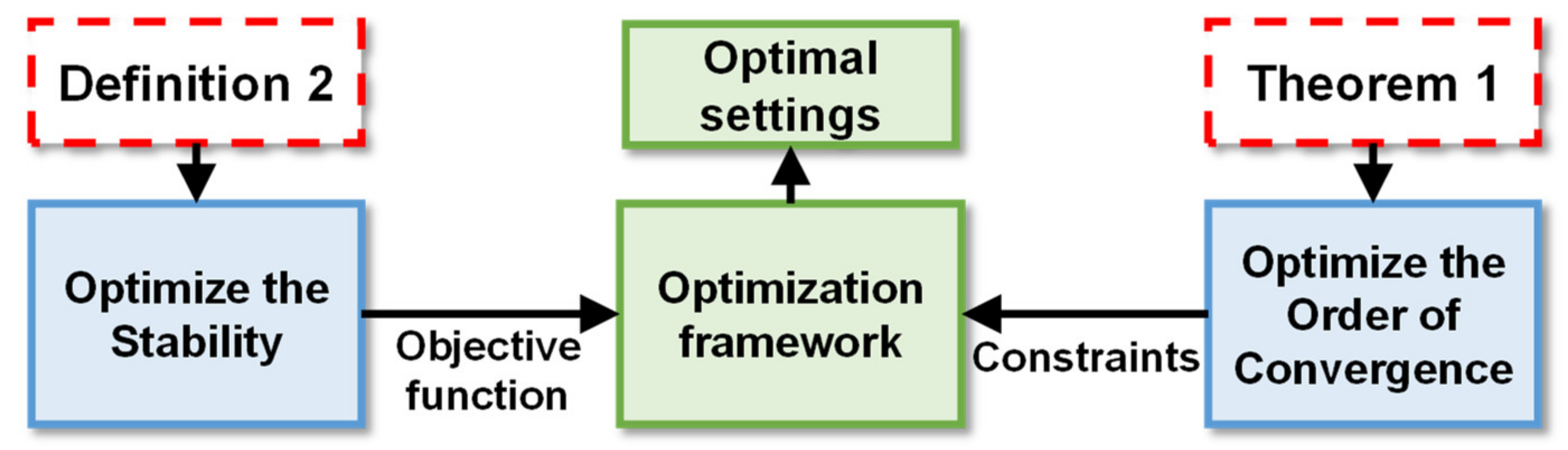
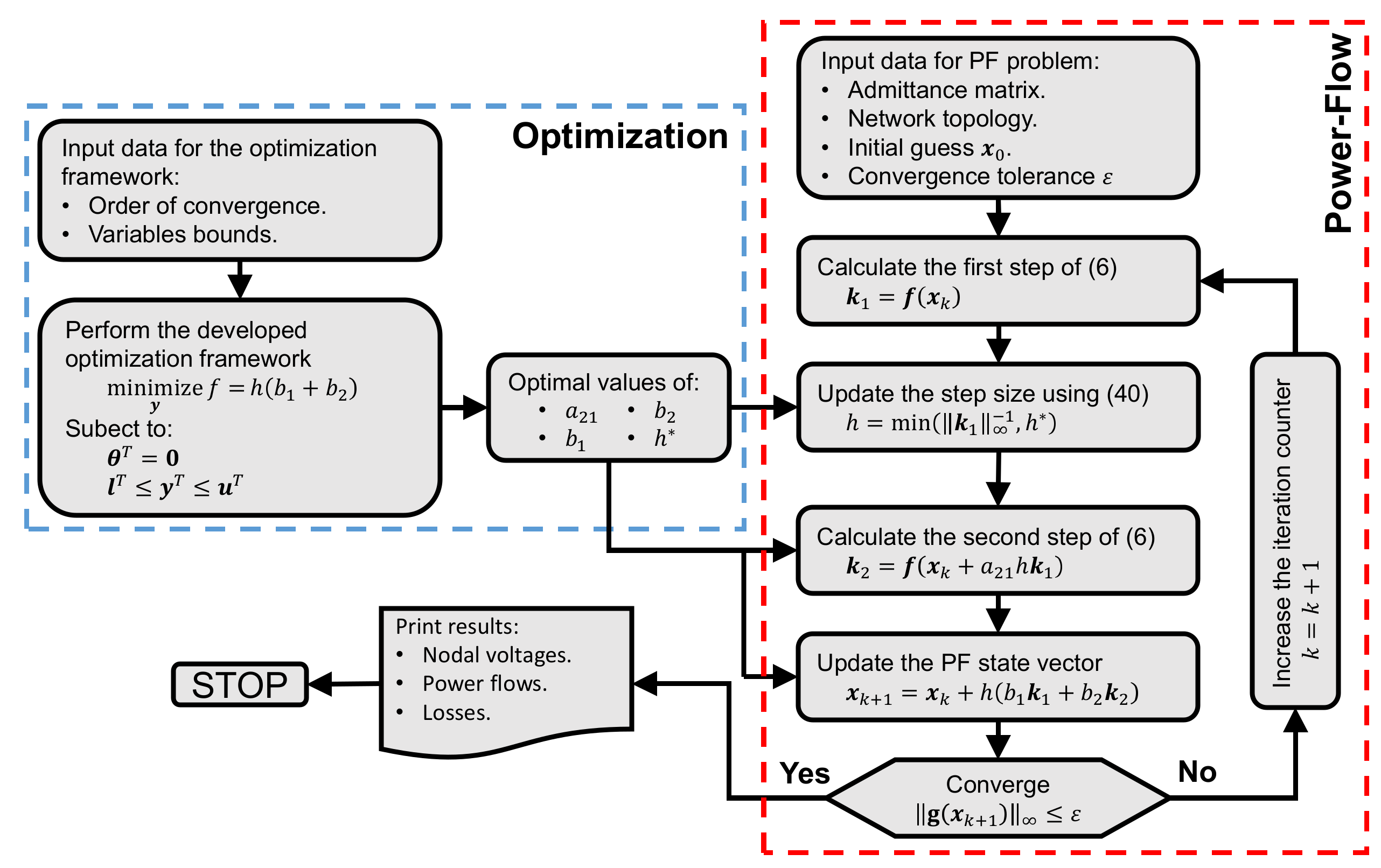
23]. As a mathematical analysis of these methods has not yet been carried out, it is not easy to know if the guidelines followed so far to develop RK-based solvers is the optimal strategy or not. This is very relevant since a proper adjustment of the parameters involved in the solution procedure might boost the numerical stability, convergence rate, and efficiency of the RK-based techniques. In this sense, this paper develops an optimization framework by which the different parameters involved in the iterative algorithm of the RK-based approaches are optimally tuned to maximize the order of convergence and numerical stability. To this end, various theorems are derived, and an optimization procedure is developed and discussed. In this sense, only minimal and acceptable heuristic assumptions were made. Based on the proposed optimization framework, three novel PF solvers with quadratic, cubic, and 4th order of convergence are developed based on the generic numerical scheme of the two-stage RK formulas. To check the adequacy of the novel proposals, various case studies are performed in several large-scale well- and ill-conditioned systems, comparing the obtained results with other benchmark solvers. This way, the present work supposes an advance with respect to others references such as [
7,
26], where the set of parameters that define the PF solver were tuned on the basis of heuristic criteria. In this sense, this paper aims at presenting a formal framework on the basis of theoretical foundation with the aim of acquiring the high properties of the two-stage RK-based PF solvers, thus supposing a benchmark for future contributions in the field of PF solution of ill-conditioned cases.
In the rest of this paper,
Section 2 describes the PF solution using two-stage RK-based PF solvers. The proposed optimization framework for optimal setting of the parameters involved in the two-stage RK-based PF solvers is developed in
Section 3.
Section 4 presents three PF solvers developed by using the framework described in
Section 3.
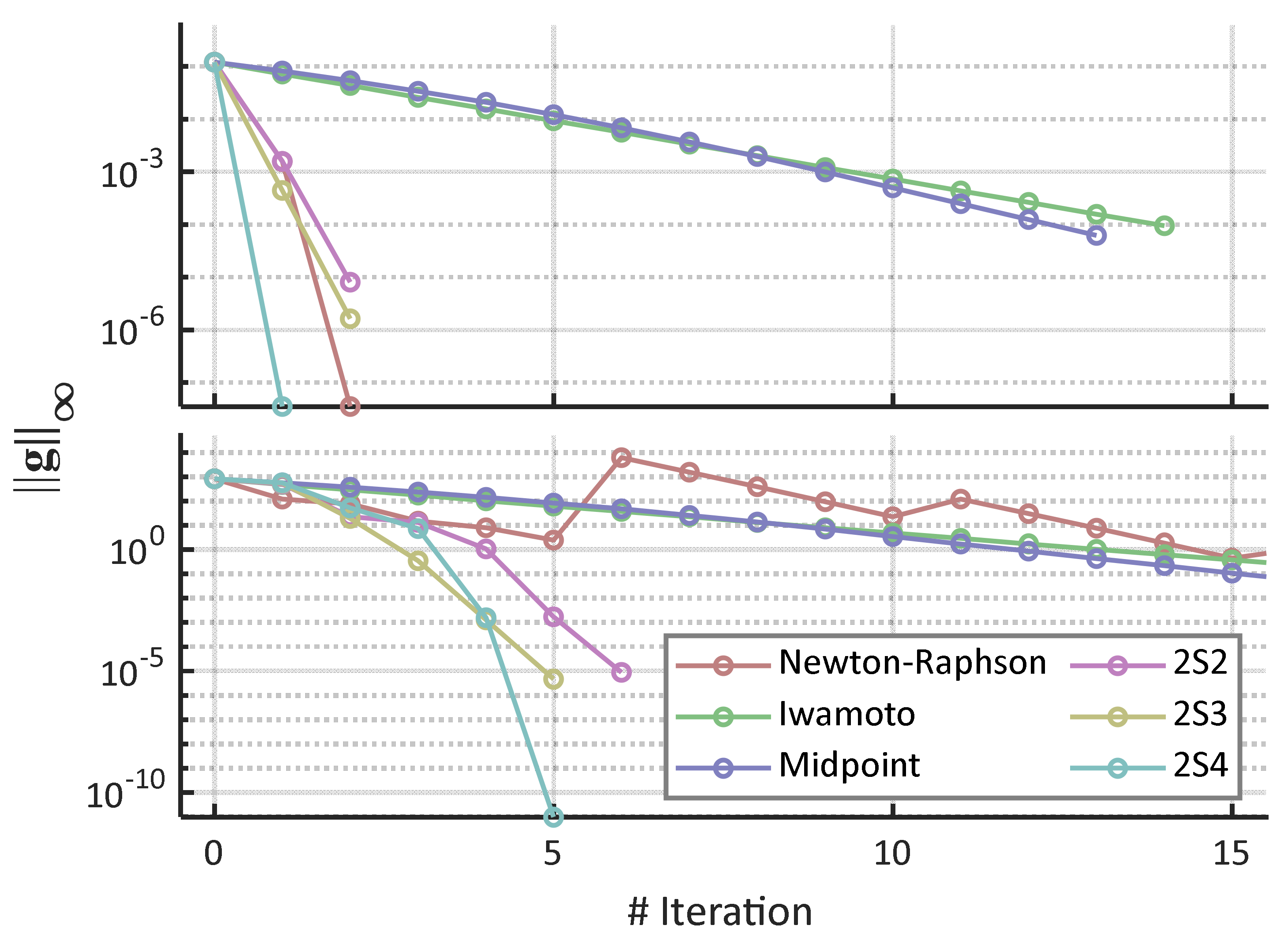
Section 4 presents various numerical results obtained with the developed techniques compared with those obtained with other benchmark methods. The paper is concluded in
Section 5.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}