
A New Four-Step Iterative Procedure for Approximating Fixed Points with Application to 2D Volterra Integral Equations


Abstract
:1. Prelude and Basic Notions
- ℑ is called a contraction if there is so that
- ℑ is called nonexpansive if i.e., it is a contraction with
- ℑ owns an FP if
2. Definitions and Auxiliary Lemmas
- The asymptotic radius of relative to Π is described as
- The asymptotic center of relative to Π is given by
- (i)
- is converges to s faster than does to t, if
- (ii)
- the two sequences and have the same rate of convergence, if
- if we get
- if then
- if and we have
- if and one can write
- if and we obtain
3. Rate of the Convergence
4. Stability Analysis
5. Results of the Convergence
- is demiclosed with respect to zero and Δ satisfies Opial’s condition;
- Δ has a Fréchet differential norm.Then the sequence provided that
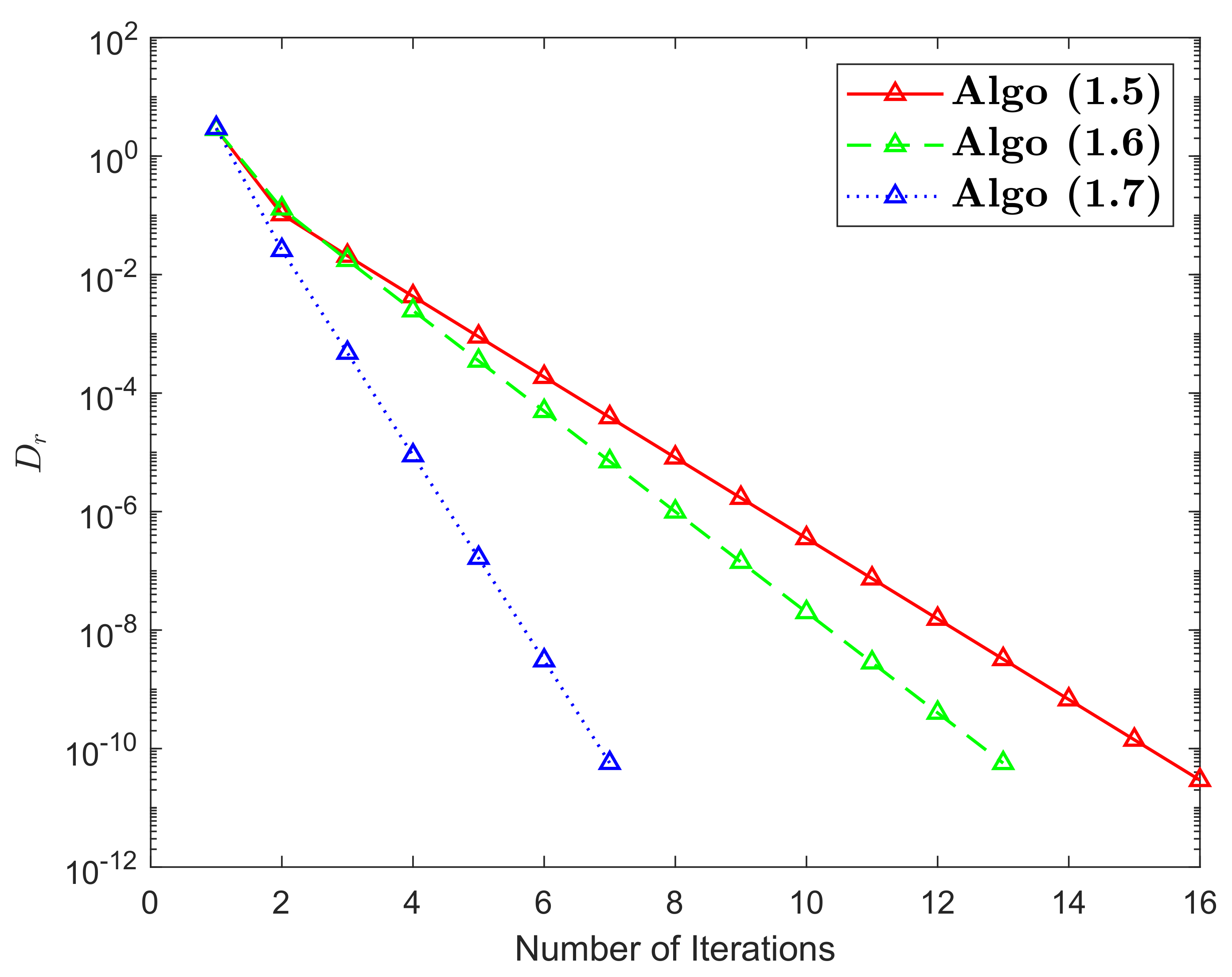
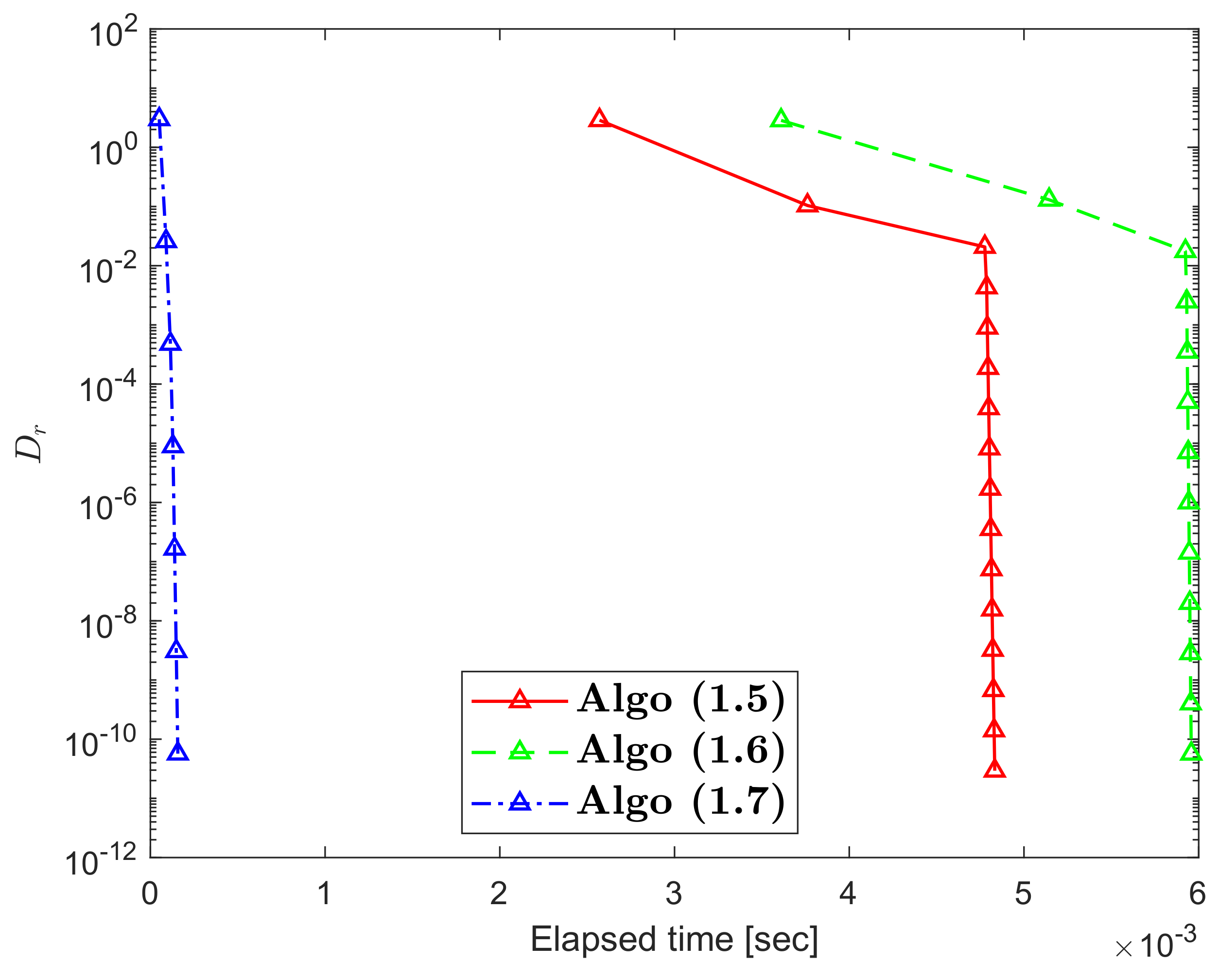
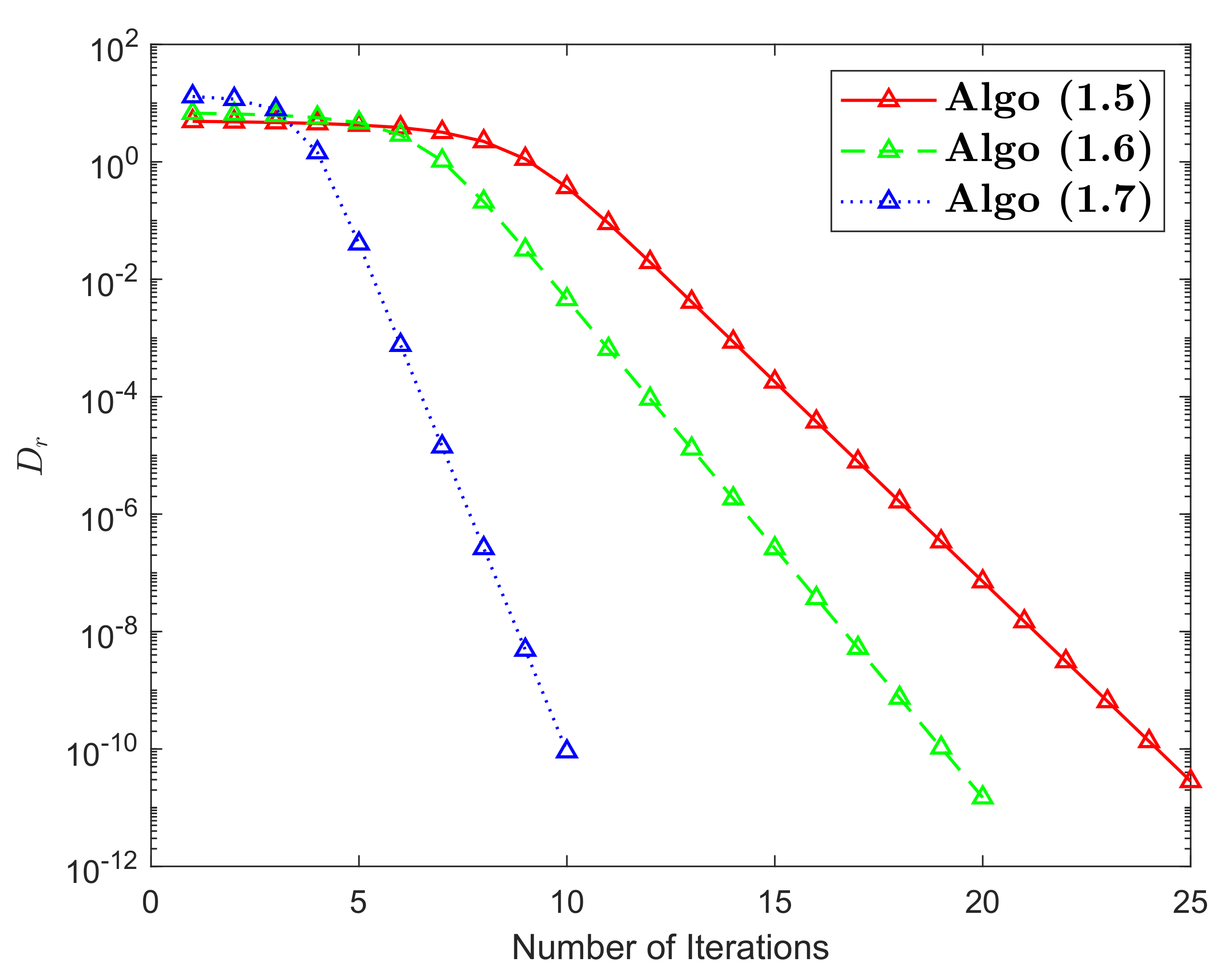
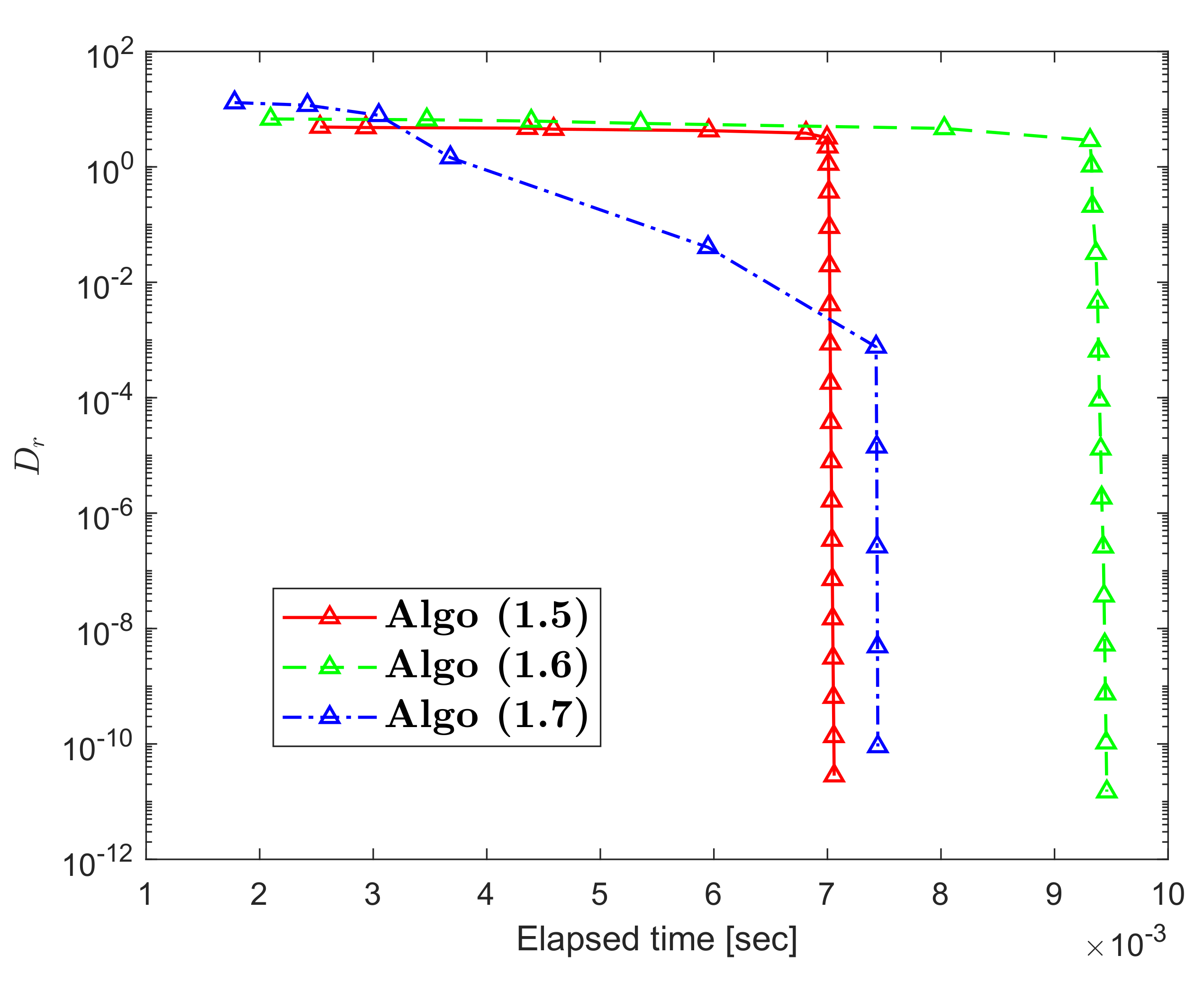
6. Numerical Example
- (I)
- If we get
- (II)
- If and we obtain
- (III)
- If and we have
- If we can write
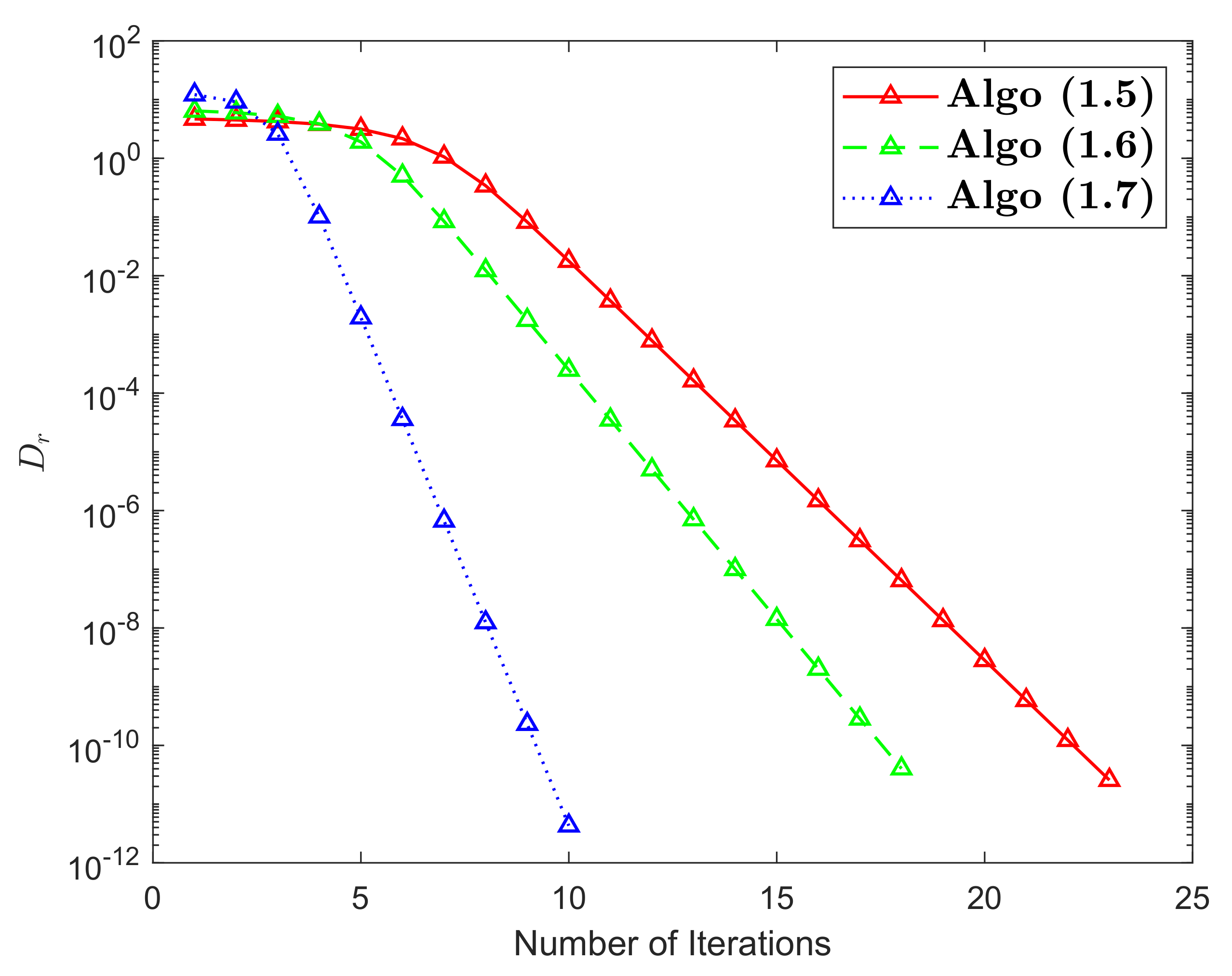
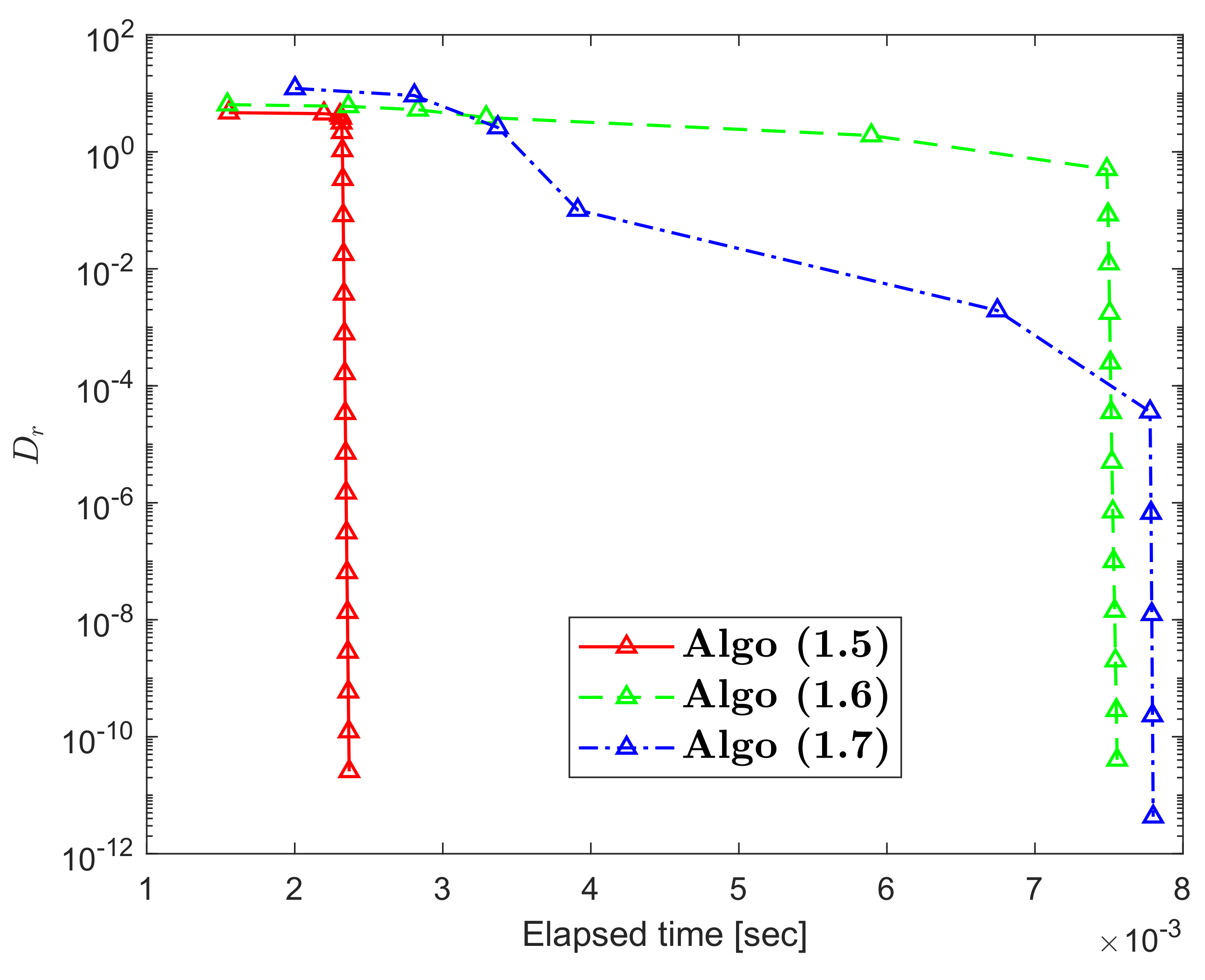
7. Solving 2D Volterra Integral Equation
- the function is continuous;
- the functions are continuous and there are the constants so thatfor
- for where
8. Conclusions and Future Works
- (1)
- If we define a mapping ℑ in a Hilbert space endowed with inner product space, we can find a common solution to the variational inequality problem by using our iteration (7). This problem can be stated as follows: find such thatwhere is a nonlinear mapping. Variational inequalities are an important and essential modeling tool in many fields such as engineering mechanics, transportation, economics, and mathematical programming, see [45,46,47].
- (2)
- We can generalize our algorithm to gradient and extra-gradient projection methods, these methods are very important for finding saddle points and solving many problems in optimization, see [6].
- (3)
- We can accelerate the convergence of the proposed algorithm by adding shrinking projection and CQ terms. These methods stimulate algorithms and improve their performance to obtain strong convergence, for more details, see [7].
- (4)
- If we consider the mapping ℑ as an —inverse strongly monotone and the inertial term is added to our algorithm, then we have the inertial proximal point algorithm. This algorithm is used in many applications such as monotone variational inequalities, image restoration problems, convex optimization problems, and split convex feasibility problems, see [48,49,50]. For more accuracy, these problems can be expressed as mathematical models such as machine learning and the linear inverse problem.
- (5)
- We can try to determine the error of our present iteration.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Arias, A.; Gheondea, A.; Gudder, S. Fixed points of quantum operations. J. Math. Phys. 2002, 43, 5872. [Google Scholar] [CrossRef] [Green Version]
- Lan, K.Q.; Wu, J.H. A fixed-point theorem and applications to problems on sets with convex sections and to Nash equilibria. Math. Comput. Mod. 2002, 36, 139–145. [Google Scholar] [CrossRef]
- Amar, A.B.; Jeribi, A.; Mnif, M. Some fixed point theorems and application to bio-logical model. Numer. Funct. Anal. Optim. 2008, 29, 1–23. [Google Scholar] [CrossRef]
- Eke, K.S.; Olisama, V.O.; Bishop, S.A.; Liu, L. Some fixed point theorems for convex contractive mappings in complete metric spaces with applications. Cogent Math. Stat. 2019, 6, 1655870. [Google Scholar] [CrossRef]
- Georgescu, F. IFS consisting of generalized convex contractions. Anal. Stiintifice Ale Univers. Ovidius Const. 2017, 25, 77–86. [Google Scholar]
- Korpelevich, G.M. The extragradient method for finding saddle points and other problems. Ekon. Mat. Metod. 1976, 12, 747–756. [Google Scholar]
- Martinez-Yanes, C.; Xu, H.K. Strong convergence of the CQ method for fixed point iteration processes. Nonlinear Anal. 2006, 64, 2400–2411. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: Berlin, Germany, 2011. [Google Scholar]
- Adamu, A.; Kitkuan, D.; Padcharoen, A.; Chidume, C.E.; Kumam, P. Inertial viscosity-type iterative method for solving inclusion problems with applications. Math. Comput. Simul. 2022, 194, 445–459. [Google Scholar] [CrossRef]
- Adamu, A.; Deepho, J.; Ibrahim, A.H.; Abubakar, A.B. Approximation of zeros of sum of monotone mappings with applications to variational inequality and image restoration problems. Nonlinear Funct. Anal. Appl. 2021, 26, 411–432. [Google Scholar]
- Tuyen, T.M.; Hammad, H.A. Effect of shrinking projection and CQ-methods on two inertial forward–backward algorithms for solving variational inclusion problems. Rend. Circ. Mat. Palermo II Ser. 2021, 70, 1669–1683. [Google Scholar] [CrossRef]
- Watcharaporna, C.; Damrongsak, Y.; Hammad, H.A. Modified hybrid projection methods with SP iterations for quasi-nonexpansive multivalued mappings in Hilbert spaces. Bull. Iran. Math. Soc. 2021, 47, 1399–1422. [Google Scholar]
- Picard, E. Memoire sur la theorie des equations aux derivees partielles et la methode des approximations successives. J. Math. Pures et Appl. 1890, 6, 145–210. [Google Scholar]
- Halpern, B. Fixed points of nonexpanding maps. Bull. Am. Math. Soc. 1967, 73, 957–961. [Google Scholar] [CrossRef] [Green Version]
- He, S.; Yang, C. Boundary point algorithms for minimum norm fixed points of nonexpansive mappings. Fixed Point Theory Appl. 2014, 2014, 56. [Google Scholar] [CrossRef] [Green Version]
- Hammad, H.A.; Rahman, H.u.; De la Sen, M. Shrinking projection methods for accelerating relaxed inertial Tseng-type algorithm with applications. Math. Probl. Eng. 2020, 2020, 7487383. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rahman, H.u.; De la Sen, M. Advanced algorithms and common solutions to variational inequalities. Symmetry 2020, 12, 1198. [Google Scholar] [CrossRef]
- Zamfirescu, T. Fixed point theorems in metric spaces. Arch. Math. 1972, 23, 292–298. [Google Scholar] [CrossRef]
- Berinde, V. On the approximation of fixed points of weak contractive mappings. Carpath. J. Math. 2003, 19, 7–22. [Google Scholar]
- Suzuki, T. Fixed point theorems and convergence theorems for some generalized nonexpansive mappings. J. Math. Anal. Appl. 2008, 340, 1088–1095. [Google Scholar] [CrossRef] [Green Version]
- Pant, R.; Pandey, R. Existence and convergence results for a class of non-expansive type mappings in hyperbolic spaces. Appl. Gen. Topol. 2019, 20, 281–295. [Google Scholar] [CrossRef]
- Mann, W.R. Mean value methods in iteration. Proc. Am. Math. Soc. 1953, 4, 506–510. [Google Scholar] [CrossRef]
- Ishikawa, S. Fixed points by a new iteration method. Proc. Am. Math. Soc. 1974, 44, 147–150. [Google Scholar] [CrossRef]
- Noor, M.A. New approximation schemes for general variational inequalities. J. Math. Anal. Appl. 2000, 251, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.P.; Regan, D.O.; Sahu, D.R. Iterative construction of fixed points of nearly asymptotically nonexpansive mappings. J Nonlinear Convex Anal. 2007, 8, 61–79. [Google Scholar]
- Abbas, M.; Nazir, T. A new faster iteration process applied to constrained minimization and feasibility problems. Math. Vesn. 2014, 66, 223–234. [Google Scholar]
- Chugh, R.; Kumar, V.; Kumar, S. Strong convergence of a new three step iterative scheme in Banach spaces. Am. J. Comp. Math. 2012, 2, 345–357. [Google Scholar] [CrossRef] [Green Version]
- Sahu, D.R.; Petrusel, A. Strong convergence of iterative methods by strictly pseudocontractive mappings in Banach spaces. Nonlinear Anal. Theory Methods Appl. 2011, 74, 6012–6023. [Google Scholar] [CrossRef]
- Gursoy, F.; Karakaya, V. A Picard-S hybrid type iteration method for solving a differential equation with retarded argument. arXiv 2014, arXiv:1403.2546v2. [Google Scholar]
- Thakur, B.S.; Thakur, D.; Postolache, M. A new iterative scheme for numerical reckoning fixed points of Suzuki’s generalized nonexpansive mappings. Appl. Math. Comput. 2016, 275, 147–155. [Google Scholar] [CrossRef]
- Ullah, K.; Arshad, M. Numerical reckoning fixed points for Suzuki’s generalized nonexpansive mappings via new iteration process. Filomat 2018, 32, 187–196. [Google Scholar] [CrossRef] [Green Version]
- Ahmad, J.; Ullah, K.; Arshad, M.; Ma, Z. A new iterative method for Suzuki mappings in Banach spaces. J. Math. 2021, 2021, 6622931. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rehman, H.u.; Zayed, M. Applying faster algorithm for obtaining convergence, stability, and data dependence results with application to functional-integral equations. AIMS Math. 2022, 7, 19026–19056. [Google Scholar] [CrossRef]
- Berinde, V. Picard iteration converges faster than Mann iteration for a class of quasicontractive operators. Fixed Point Theory Appl. 2004, 2, 97–105. [Google Scholar] [CrossRef] [Green Version]
- Senter, H.F.; Dotson, W.G. Approximating fixed points of nonexpansive mapping. Proc. Am. Math. Soc. 1974, 44, 375–380. [Google Scholar] [CrossRef]
- Weng, X. Fixed point iteration for local strictly pseudocontractive mapping. Proc. Am. Math. Soc. 1991, 113, 727–731. [Google Scholar] [CrossRef]
- Ullah, K.; Ahmad, J.; De la Sen, M. On generalized nonexpansive maps in Banach spaces. Computer 2020, 8, 61. [Google Scholar] [CrossRef]
- Harder, A.M. Fixed Point Theory and Stability Results for Fixed-Point Iteration Procedures. Ph.D. Thesis, University of Missouri-Rolla, St. Rolla, MO, USA, 1987. [Google Scholar]
- Hammad, H.A.; Rahman, H.u.; De la Sen, M. A novel four-step iterative scheme for approximating the fixed point with a supportive application. Inf. Sci. Lett. 2021, 10, 333–339. [Google Scholar]
- Okeke, G.A.; Abbas, M.; Sen, M.D. Approximation of the fixed point of multivalued quasi-nonexpansive mappings via a faster iterative process with applications. Discrete Dyn. Nat. Soc. 2020, 2020, 8634050. [Google Scholar] [CrossRef]
- Berinde, V. Iterative Approximation of Fixed Points; Springer: Berlin, Germany, 2007. [Google Scholar]
- Timis, I. On the weak stability of Picard iteration for some contractive type mappings and coincidence theorems. Int. J. Comput. Appl. 2012, 37, 9–13. [Google Scholar] [CrossRef]
- Cardinali, T.; Rubbioni, P. A generalization of the Caristi fixed point theorem in metric spaces. Fixed Point Theory 2010, 11, 3–10. [Google Scholar]
- Khan, S.H.; Kim, J.K. Common fixed points of two nonexpansive mappings by a modified faster iteration scheme. Bull. Korean Math. Soc. 2010, 47, 973–985. [Google Scholar] [CrossRef]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer Series in Operations Research; Springer: New York, NY, USA, 2003; Volume II. [Google Scholar]
- Konnov, I.V. Combined Relaxation Methods for Variational Inequalities; Springer: Berlin, Germany, 2001. [Google Scholar]
- Hammad, H.A.; Cholamjiak, W.; Yambangwai, D.; Dutta, H. A modified shrinking projection methods for numerical reckoning fixed points of G-nonexpansive mappings in Hilbert spaces with graph. Miskolc Math. Notes 2019, 20, 941–956. [Google Scholar] [CrossRef]
- Chen, P.; Huang, J.; Zhang, X. A primal-dual fixed point algorithm for convex separable minimization with applications to image restoration. Inverse Probl. 2013, 29, 025011. [Google Scholar] [CrossRef]
- Hammad, H.A.; Rehman, H.u.; Almusawa, H. Tikhonov regularization terms for accelerating inertial Mann-Like algorithm with applications. Symmetry 2021, 13, 554. [Google Scholar] [CrossRef]
- Dang, Y.; Sun, J.; Xu, H. Inertial accelerated algorithms for solving a split feasibility problem. J. Ind. Manag. Optim. 2017, 13, 1383–1394. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hammad, H.A.; Rehman, H.u.; De la Sen, M. A New Four-Step Iterative Procedure for Approximating Fixed Points with Application to 2D Volterra Integral Equations. Mathematics 2022, 10, 4257. https://0-doi-org.brum.beds.ac.uk/10.3390/math10224257
Hammad HA, Rehman Hu, De la Sen M. A New Four-Step Iterative Procedure for Approximating Fixed Points with Application to 2D Volterra Integral Equations. Mathematics. 2022; 10(22):4257. https://0-doi-org.brum.beds.ac.uk/10.3390/math10224257
Chicago/Turabian StyleHammad, Hasanen A., Habib ur Rehman, and Manuel De la Sen. 2022. "A New Four-Step Iterative Procedure for Approximating Fixed Points with Application to 2D Volterra Integral Equations" Mathematics 10, no. 22: 4257. https://0-doi-org.brum.beds.ac.uk/10.3390/math10224257