1. Introduction
Let
K to be a nonempty convex, closed subset of a Hilbert space
and
be a bifunction with
for each
The equilibrium problem for
f upon
K is defined as follows:
The equilibrium problem, pioneered by Blum and Oettli [
1] as a unifying feature, is found to be involved more and more actively in a number of applications, such as poroelasticity for petroleum engineering [
2], porous materials [
3,
4], financial analysis in economics [
5,
6], the reconstruction of images in imaging processing [
7,
8,
9], telecommunication networks or public roads [
10,
11], and noncooperative games with the corresponding equilibrium concept by Nash [
12]. The problem (EP) was also known as Ky Fan’s inequality [
13] due to his contributions to this area of research. In fact, this problem did not receive sufficient consideration before this specific format. Nikaido characterized Nash equilibria [
14] as the solutions of the problem (EP), and Gwinner designed it just as a tool to solve optimization and variational inequalities [
15]; however, they did not deal with the problem itself in a separate setup.
The equilibrium problem involves many mathematical problems as a particular case, i.e., the variational inequality problems (VIP), fixed point problems, complementarity problems, optimization problems, saddle point problems, the Nash equilibrium of non-cooperative games, and the vector and scalar minimization problems (see [
1,
16]). Moreover, iterative methods are efficient tools to evaluate an approximate solution to an equilibrium problem. Several methods are well known for solving the problem (EP), for instance the proximal point method [
17,
18], projection methods [
19], extragradient methods [
20,
21,
22], the subgradient method [
23,
24,
25], methods using the Bregman distance [
26], and others [
27,
28,
29,
30].
The extragradient method was originally established by Korpelevich [
31] for solving the variational inequality problem, which is a specific case of equilibrium problems. Korpelevich proved the weak convergence of the generated sequence under the hypotheses of Lipschitz continuity and pseudo-monotonicity on the operator. It involves determining two projections onto a closed convex set in each iteration of the method. If the closed convex set is simple enough, so that projections onto it are explicitly computed, then the extragradient method is exceptionally suitable. The modification of this method is the subgradient extragradient method [
32], where the second projection is not taken over onto the closed convex set, but on a half space and provides a simple calculation.
In 2008, Tran et al. [
33] proposed an extragradient method extension of the Korpelevich extragradient method [
31] for dealing with the pseudo-monotone equilibrium problem in finite-dimensional spaces. It is crucial to determine two minimization problems on a closed convex set in each iteration of the method, and there is a reasonable fixed stepsize in minimization problems. Precisely, the iterative sequence
is determined as follows:
where
, and
are Lipschitz constants. In 2016, Lyashko et al. [
34] proposed an extension of the method (
2) motivated by the result in [
35]. Precisely, this iterative sequence
is defined as follows:
where
and
are Lipschitz constants.
On the other hand, inertial-type methods are also important, based on the technique of the heavy-ball methods of the second-order time dynamic system. Polyak [
36] began by taking inertial extrapolation as an acceleration method to solve smooth convex optimization problems. These methods are two-step iterative schemes, while the next iteration is evaluated by the use of the previous two iterations, and it could be viewed as an accelerating step of the iterative sequence. Several inertial-like algorithms for special cases of the problem (EP) can be found, for instance in [
37,
38,
39,
40].
This manuscript aims to introduce two modifications for the result proposed by Lyashko et al. [
34] motivated by the results in [
32,
41,
42]. These modifications are carried out by applying the inertial and subgradient strategy to speed up the iteration process and reduce the numerical computation. The first result incorporates the Lyashko two-step extragradient method with the inertial term, and a variable stepsize is followed that is updated on every single iteration by using the previous iterations. We prove a weak convergence theorem for our first proposed method through the standard assumptions on the cost bifunction. Furthermore, we come up with an alternative inertial-type method, which is another variant of the first method. The second method does not require any knowledge about the strongly pseudomonotone and Lipschitz-type constants of a bifunction, and the strong convergence of the method is achieved.
This paper is arranged as follows:
Section 2 includes a number of definitions and basic results.
Section 3 and
Section 4 contain both of our methods involving the pseudomonotone and strongly pseudomonotone bifunction, as well as the convergence theorem.
Section 5 covers the applications of our proposed results to the variational inequality problems.
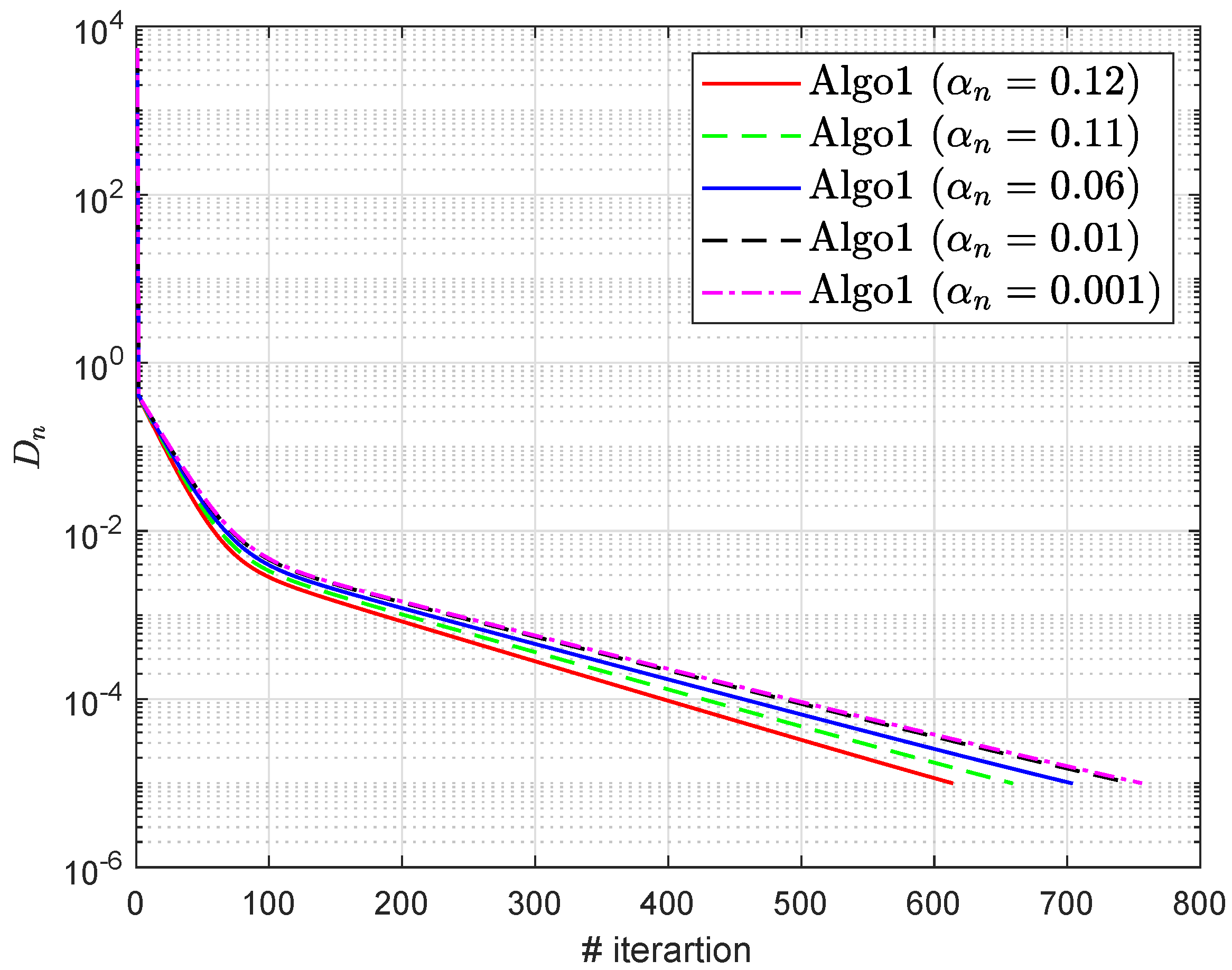
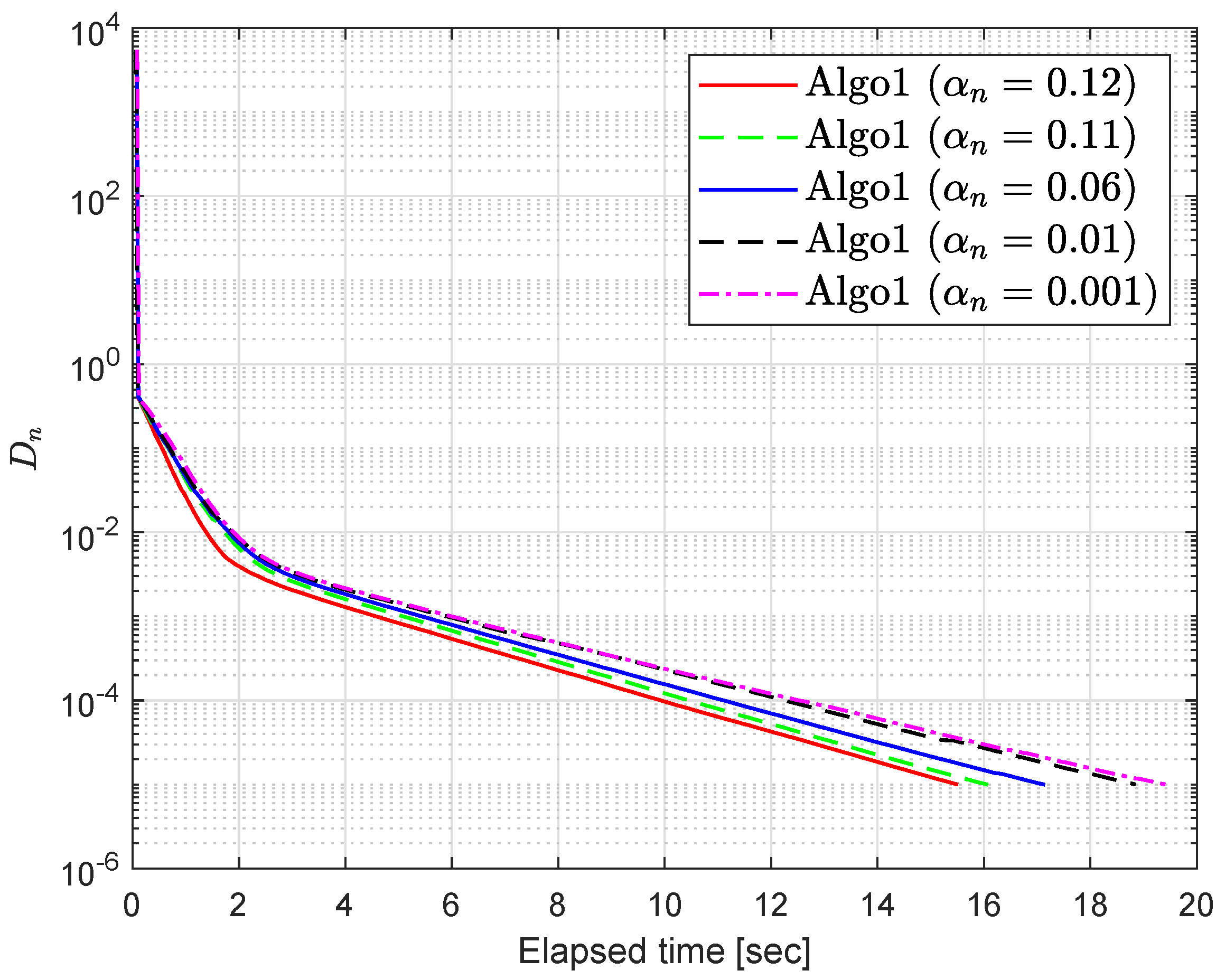
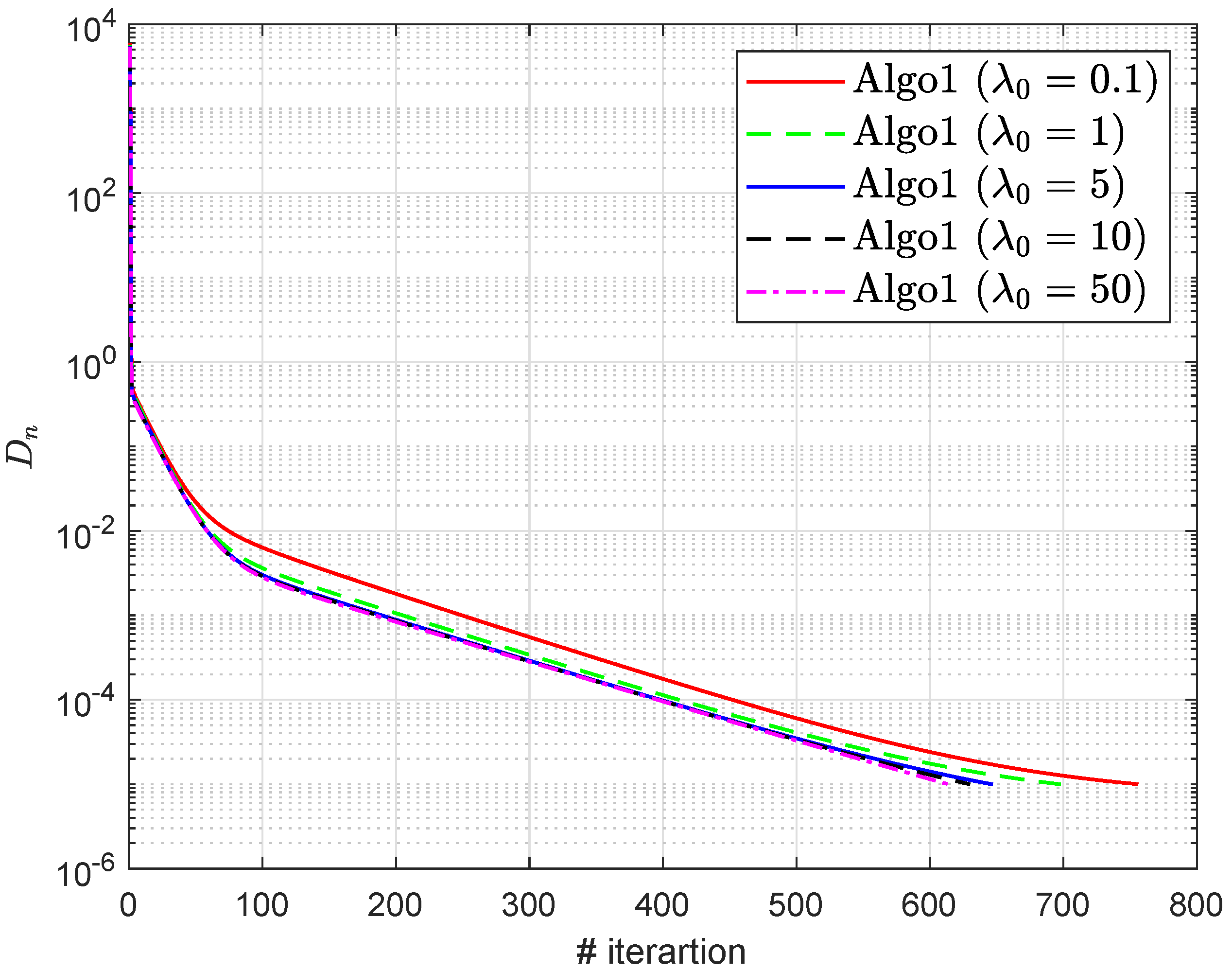
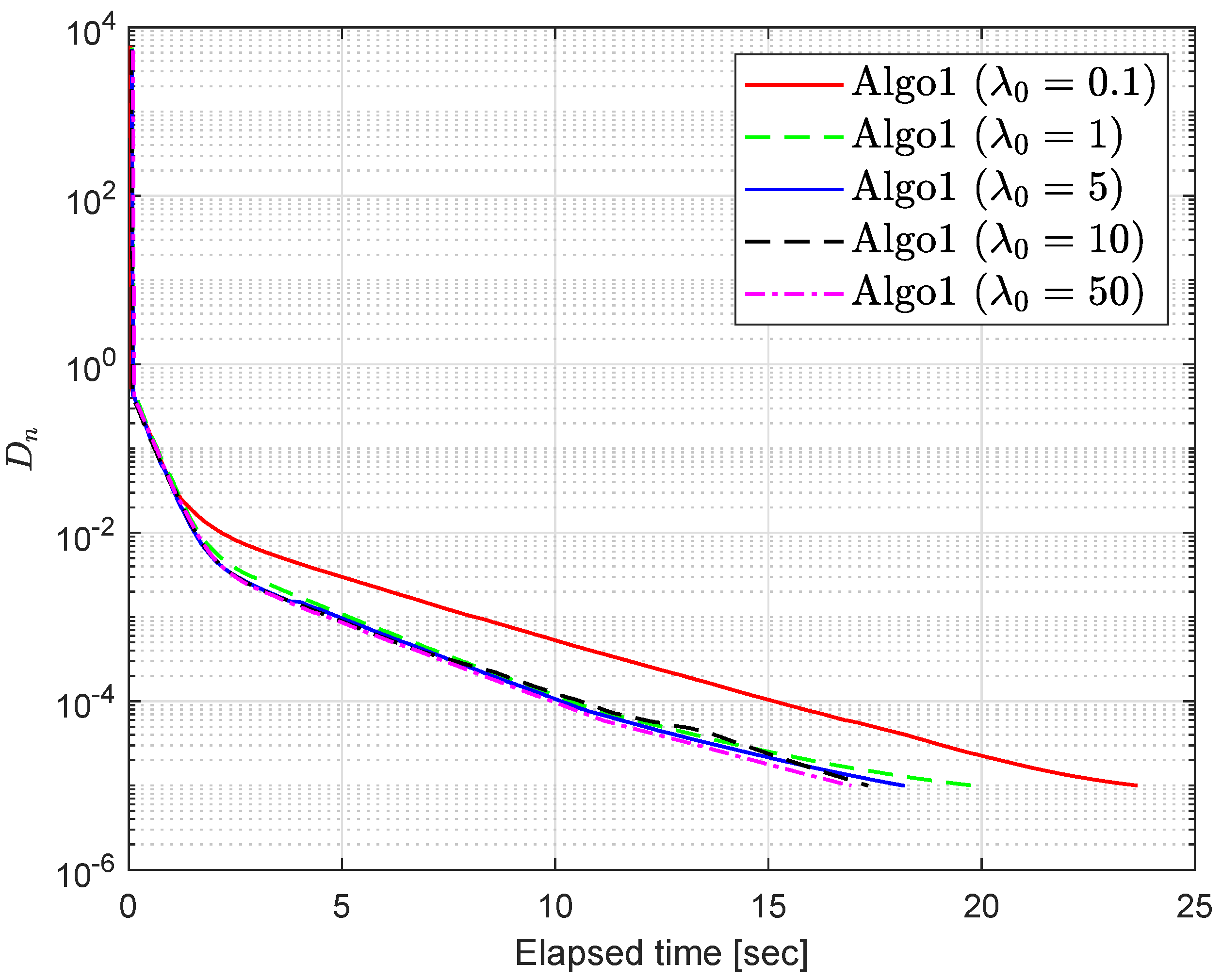
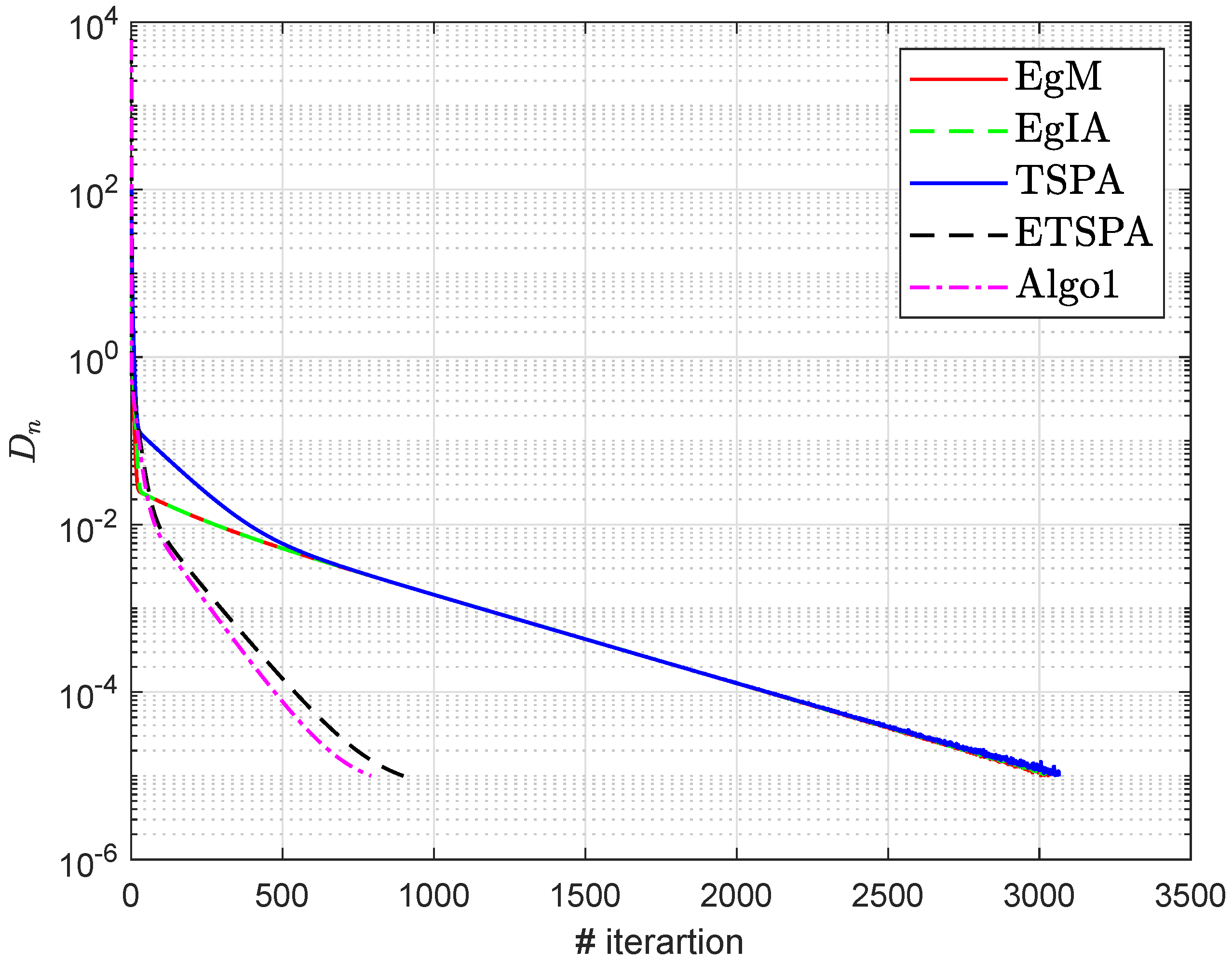
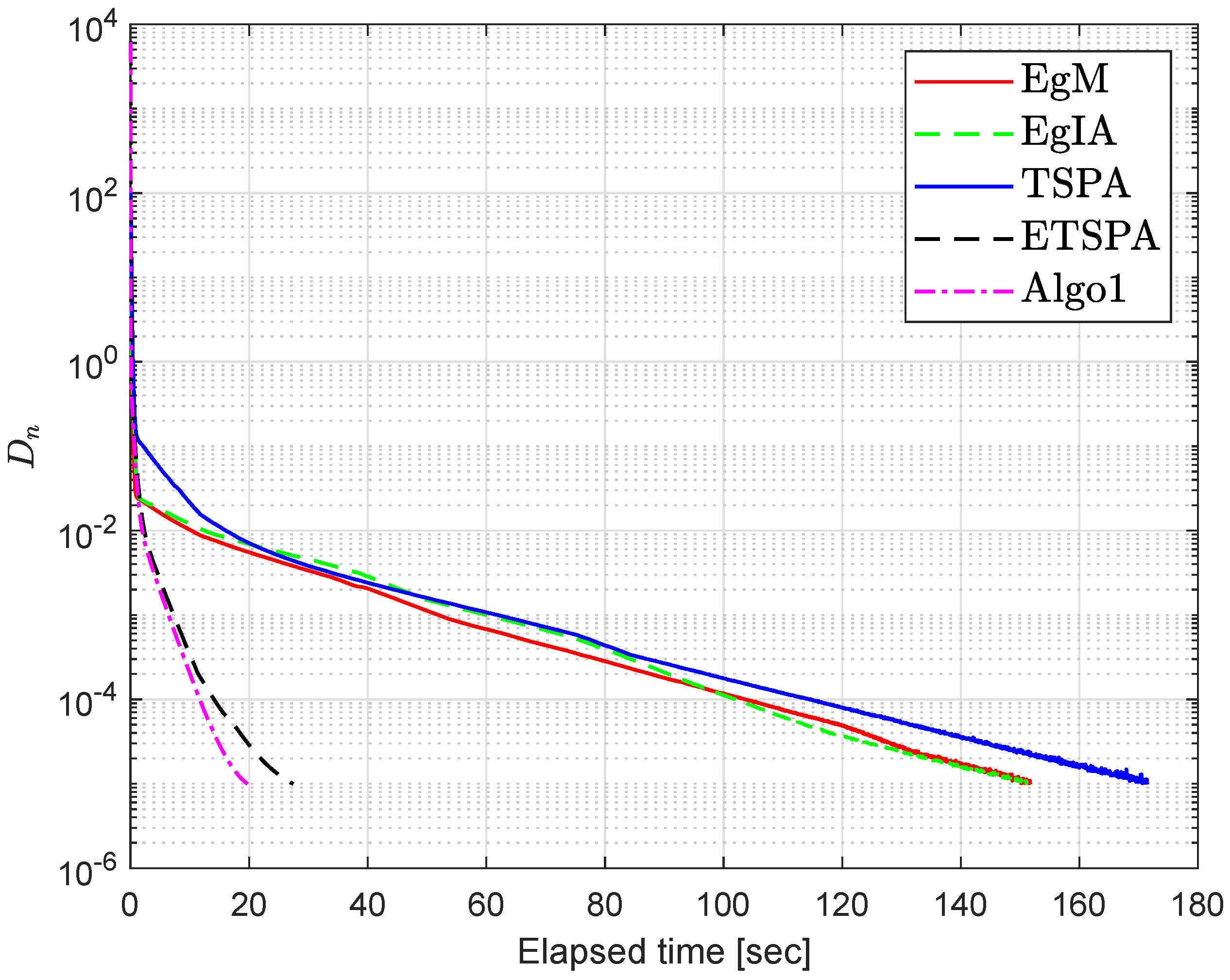
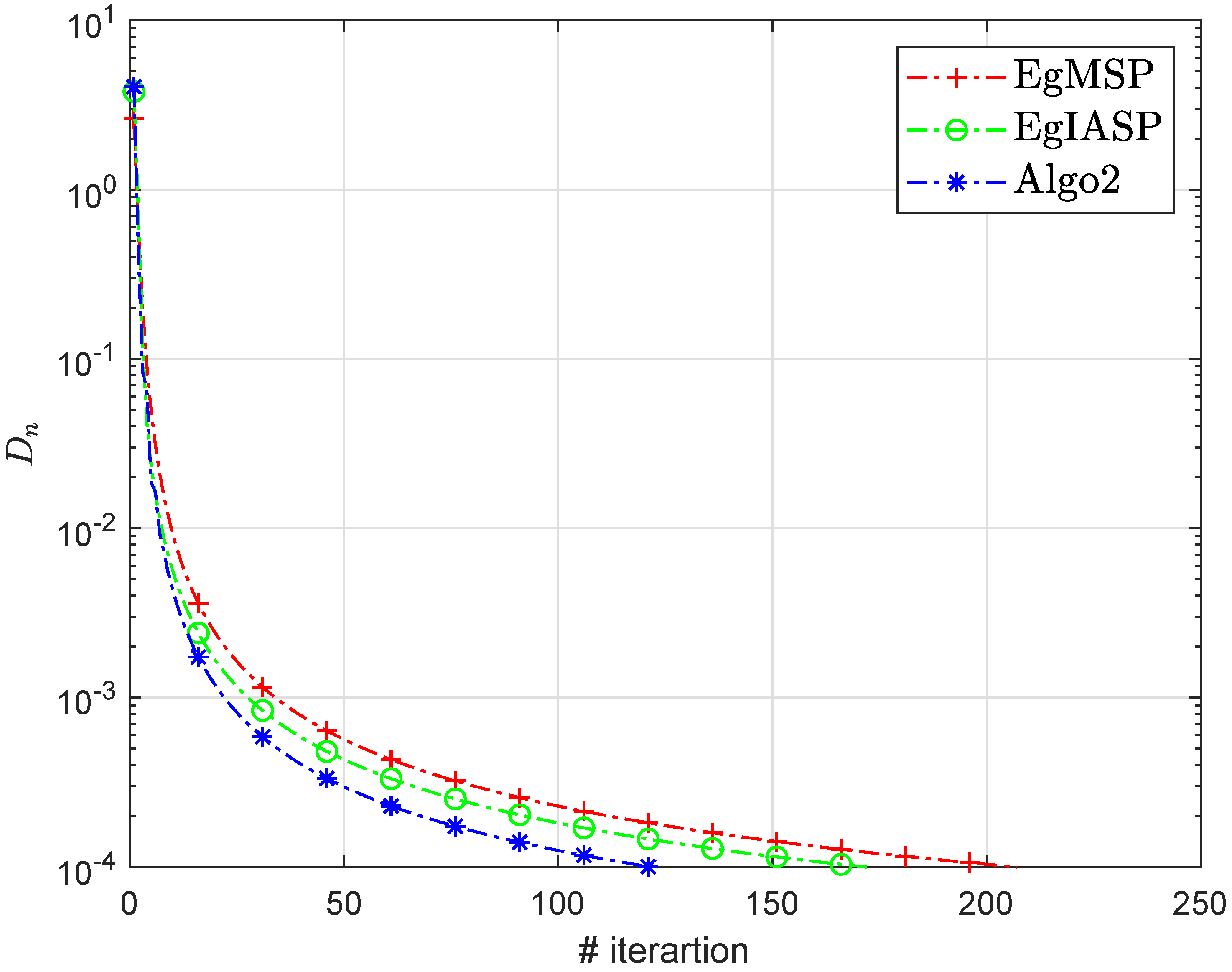
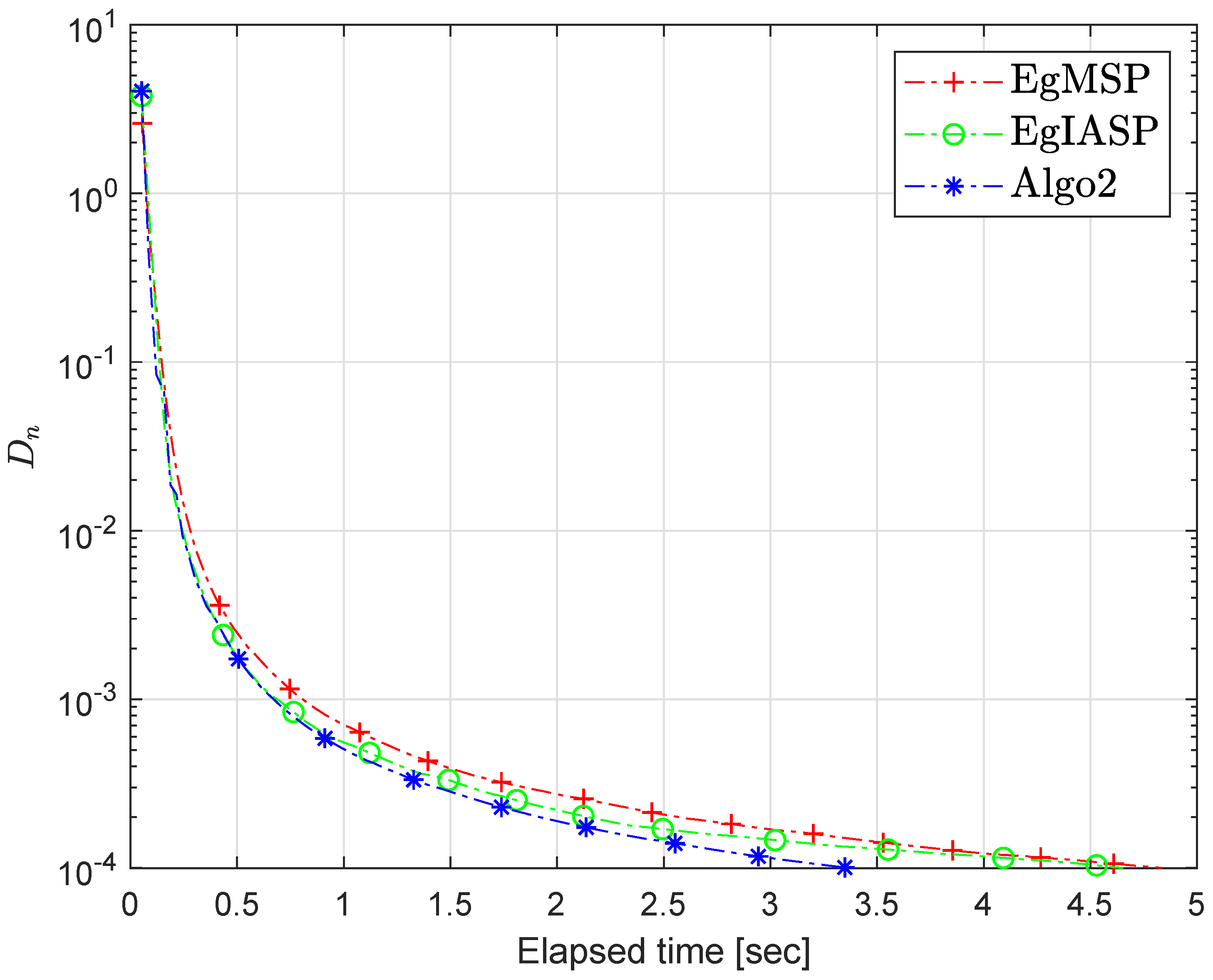
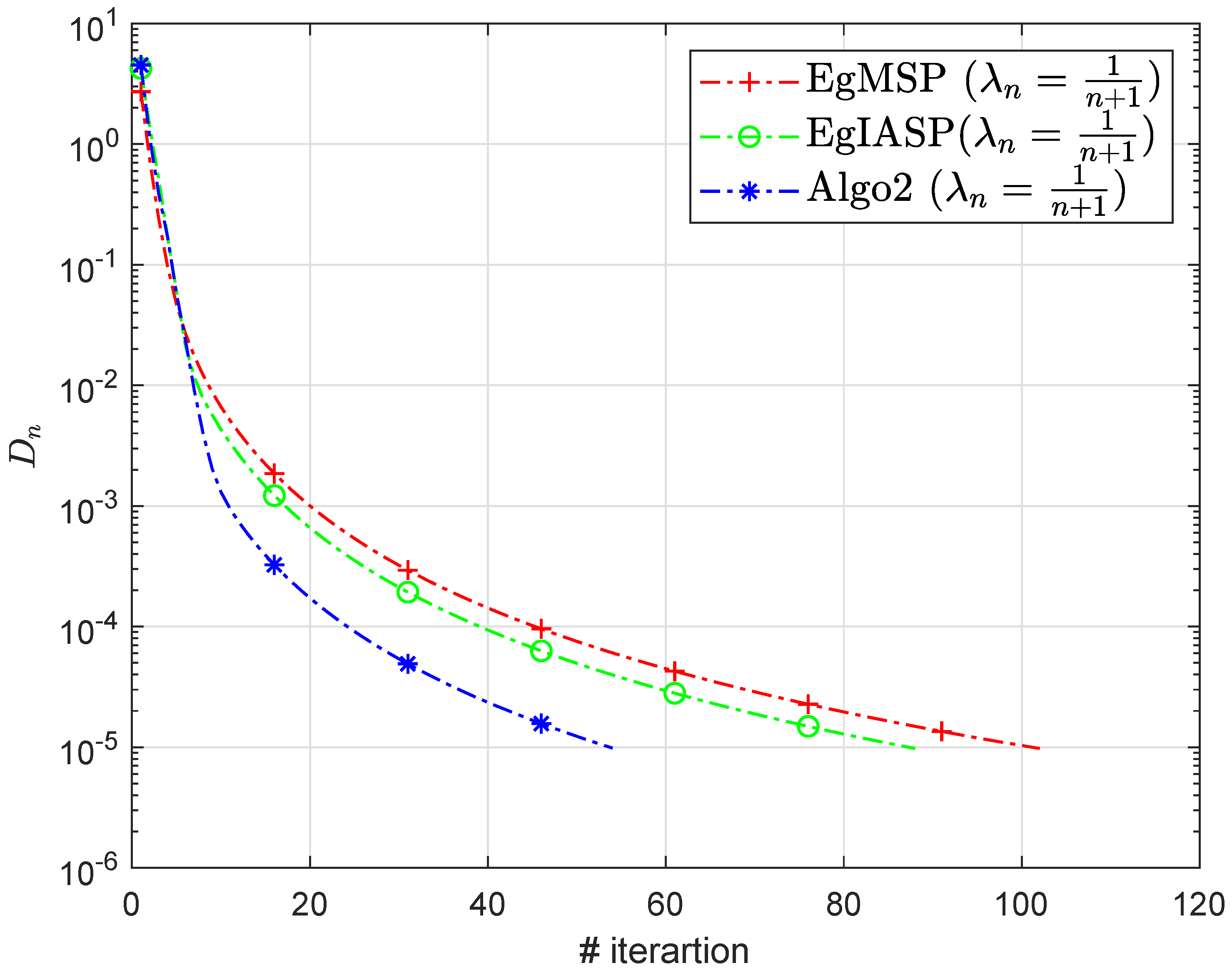
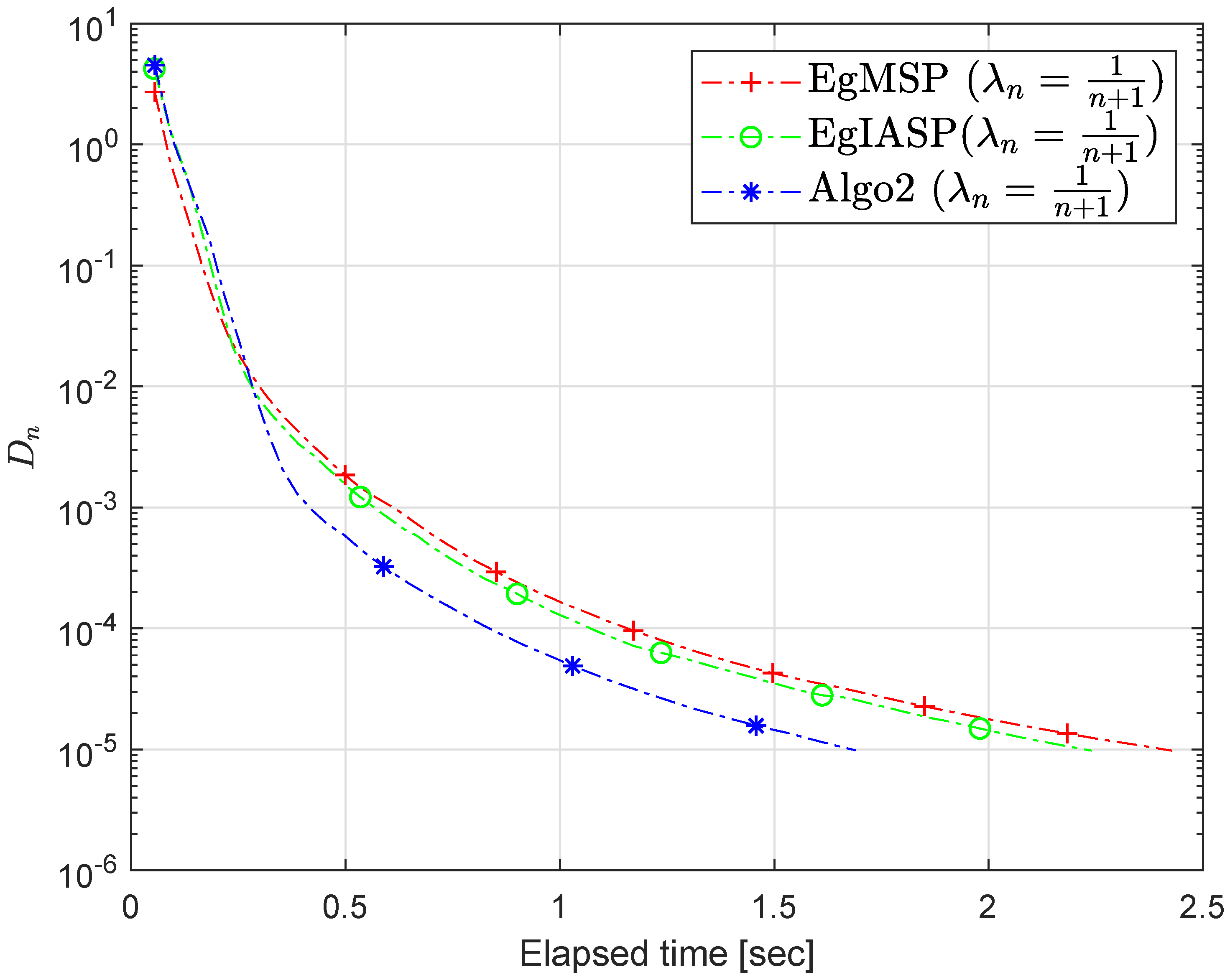
Section 6 illustrates numerical experiments in comparison with other existing algorithms using the Nash–Cournot equilibrium models to display the efficiency of our proposed algorithms.
3. An Algorithm for the Pseudomonotone Equilibrium Problem and Its Convergence Analysis
The first method is developed by adding an inertial term to Algorithm 1 ([
34], p. 4). It is important to note that the algorithm in the paper [
34] cannot be used practically without knowledge of the Lipschitz-type constants of the bifunction. To overcome this situation, we suggest a new step-size rule that does not depend on Lipschitz-type constants. Rather, it depends on certain previous iterations and updates on each iteration. In a situation where Lipschitz constants are unknown or difficult to calculate, this approach is very useful. The following is our first algorithm in more detail:
| Algorithm 1 Two-step proximal iterative method for pseudomonotone EP. |
Initialization: Choose and Set:
Iterative steps: Now, and are known for . Step 1: Construct a half space:
where , and then, compute:
where and is a nondecreasing sequence. Step 2: Set with:
Step 3: If , STOP; otherwise, set , and return back to Step 1.
|
Assumption 1. Let a bifunction satisfy the following conditions:
- (A1)
f is pseudomonotone on K with for all ;
- (A2)
f satisfies the Lipschitz-type condition on with and ;
- (A3)
for each and with ;
- (A4)
is subdifferentiable and convex on for each
Lemma 6. We have the following inequality from Algorithm 1. Proof. By the value of
with Lemma 1, we have:
Thus, for
, there exists
such that:
which gives:
By
, we have
This implies that:
From
and by the subdifferential definition, we have:
Combining (
4) and (
5), we obtain:
Lemma 7. We also have the following expression from Algorithm 1. Proof. The proof is identical to the proof of Lemma 6. □
Remark 1. By taking and in Algorithm 1, we can get from Lemma 6 and Lemma 7, respectively.
Lemma 8. We have the following relationship from Algorithm 1. Proof. Since
this gives that
Thus, we get:
By
and the definition of subdifferential, we get:
Substituting
in the above inequality, we get:
Combining (
6) and (
7), we have:
Lemma 9. Let satisfy Assumption 1. Then, for each we have: Proof. It follows from Lemma 6 with
that we have:
Thus,
, and due to Condition (A1), we have
This implies that:
By the definition,
implies that:
both sides have been multiplied with
such that:
By combing (
9) and (
10), we have:
Since
, then from Lemma 8, we have:
From (
11) and (
12), we obtain:
We have the following facts:
and:
From above facts with Expression (
13) complete the proof. □
Theorem 1. The sequences , and are generated by Algorithm 1 and weakly converge to where: Proof. Adding to both sides the value
in Lemma 9, we have:
By the definition of
in Algorithm 1, we get:
The value of
with Lemma 2 gives:
Thus, Expression (
18) with (
19) and (
21) turns into:
where
By Substituting:
From Expression (
24) with (
25), we obtain:
and we continue to evaluate:
Due to
the above implies that:
Due to our supposition and from the above, there exists an
and
such that:
Thus, Expression (
26) with (
28) implies that:
The sequence
is non-increasing for
. By the value of
, we have:
From the value
we have:
The expression (
31) for
implies that:
It follows from Expressions (
30) and (
32) that:
It follows from Expressions (
29) and (
33) that:
and letting
in Expression (
34), we obtain:
From Expressions (
20) and (
35), we have:
and also to continue:
Let
Expression (
33) converts into:
By Expressions (
16) and (
19) with (
38) for
we have:
Due to the assumption on
for some
Let us fix
and Expressions (
38) and (
39) for
Summing them, we have:
and letting
in the above expression leads to:
The above expression also implies that:
By using the triangle inequality with Expression (
42), we have:
Next, from Expression (
14) with (
19):
and the above expression with (
35), (
41), and Lemma 3 implies that the limit of
and
exists for each
meaning that the sequences
,
, and
are bounded. Next, we have to prove that each weak sequential limit point of the sequence
belongs to
Let
z be any sequential weak cluster point of the sequence
i.e., a weak convergent subsequence
of
converging to
which also implies that
also converge weakly to
Now, our aim to show that
Using Lemma 6, the definition of
(
10), and Lemma 8, we obtain:
whereas
y is an any element in
As a result, with (
36), (
37), (
42), and (
43) and due to the boundness of
, the above inequality goes to zero. By given
the assumption (A3), and
we get:
Since then It gives that z belongs to By Lemma 4, we show that , and converge weakly to as □
5. Application to Variational Inequality Problems
Now, we study the applications of our proposed methods to solve the pseudomonotone and strongly monotone variational inequality problems. An operator is considered to be:
- (1)
strongly pseudomonotone on K if
- (2)
pseudomonotone on K if
- (3)
satisfying being L-Lipschitz continuous on K if
The variational inequality problem is defined as:
Note: Let bifunction
for all
Then, the equilibrium problem converts into the above variational inequality problem with
It follows from
in Algorithm 1 and the above definition of bifunction
f that:
The value of
reduces to the following projection:
Assumption 3. Let satisfy the following conditions:
- (G1)
G is strongly pseudomonotone on K, and is a nonempty solution set;
- (G2)
G is pseudomonotone on K, and is a nonempty solution set;
- (G3)
G is L-Lipschitz continuous upon K for positive constant
- (G4)
for every and satisfying
Corollary 1. Let satisfy () as in Assumption 3. Assume , and is the sequence generated in the following way:
- (i)
Choose , and Set: - (ii)
Assume , and are known for Construct a half space:Compute:The stepsize sequence is updated as follows:
Thus, the sequence , and converges weakly to of
Corollary 2. Let satisfy () as in Assumption 3. Assume and are the sequences generated as follows:
- (i)
Choose , and Set: - (ii)
Assume that and are known for Construct a half space:Compute:The stepsize sequence satisfies the following hypothesis:
Thus, the sequence , and converges strongly to of
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}