
Image Denoising Using Adaptive and Overlapped Average Filtering and Mixed-Pooling Attention Refinement Networks


Abstract
:1. Introduction
- We propose a combinational filtering framework that can successfully remove high-density SP noise. The source code is made public here: https://github.com/Sasebalballgit/-Image-Denoising-using-AOAF-and-MARNs (accessed on 12 May 2021) for academic purposes only.
- We conduct extensive experiments to compare our method with state-of-the-art image denoising methods using the DIV2k dataset [18] to demonstrate the superiority and effectiveness of the proposed denoising framework qualitatively and quantitatively.
2. Related Work
2.1. Denoising with Conventional Linear or Nonlinear Filtering
2.2. Denoising with Deep Neural Networks
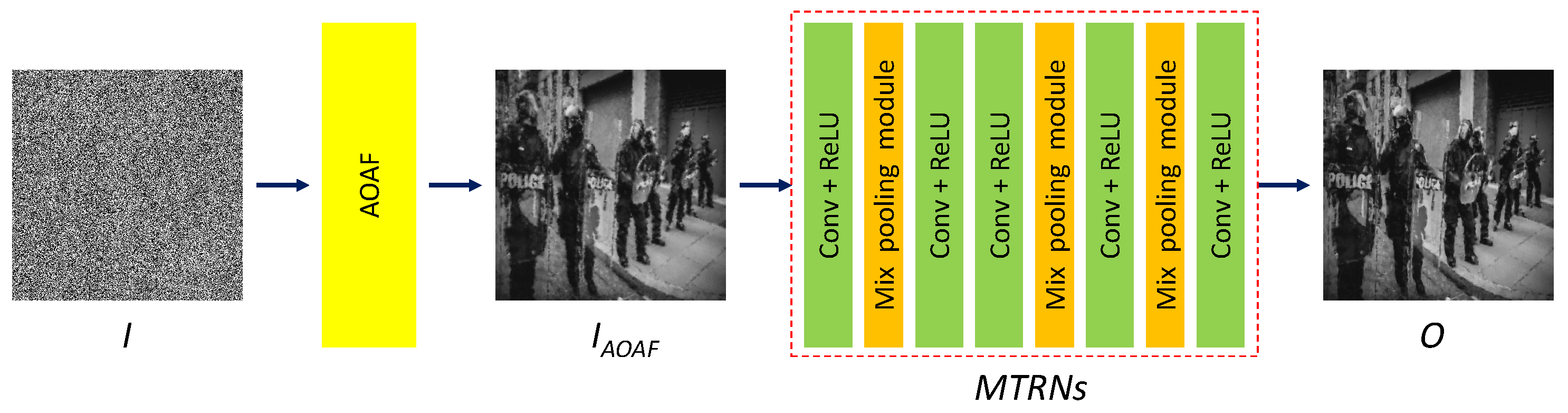
3. Proposed Method
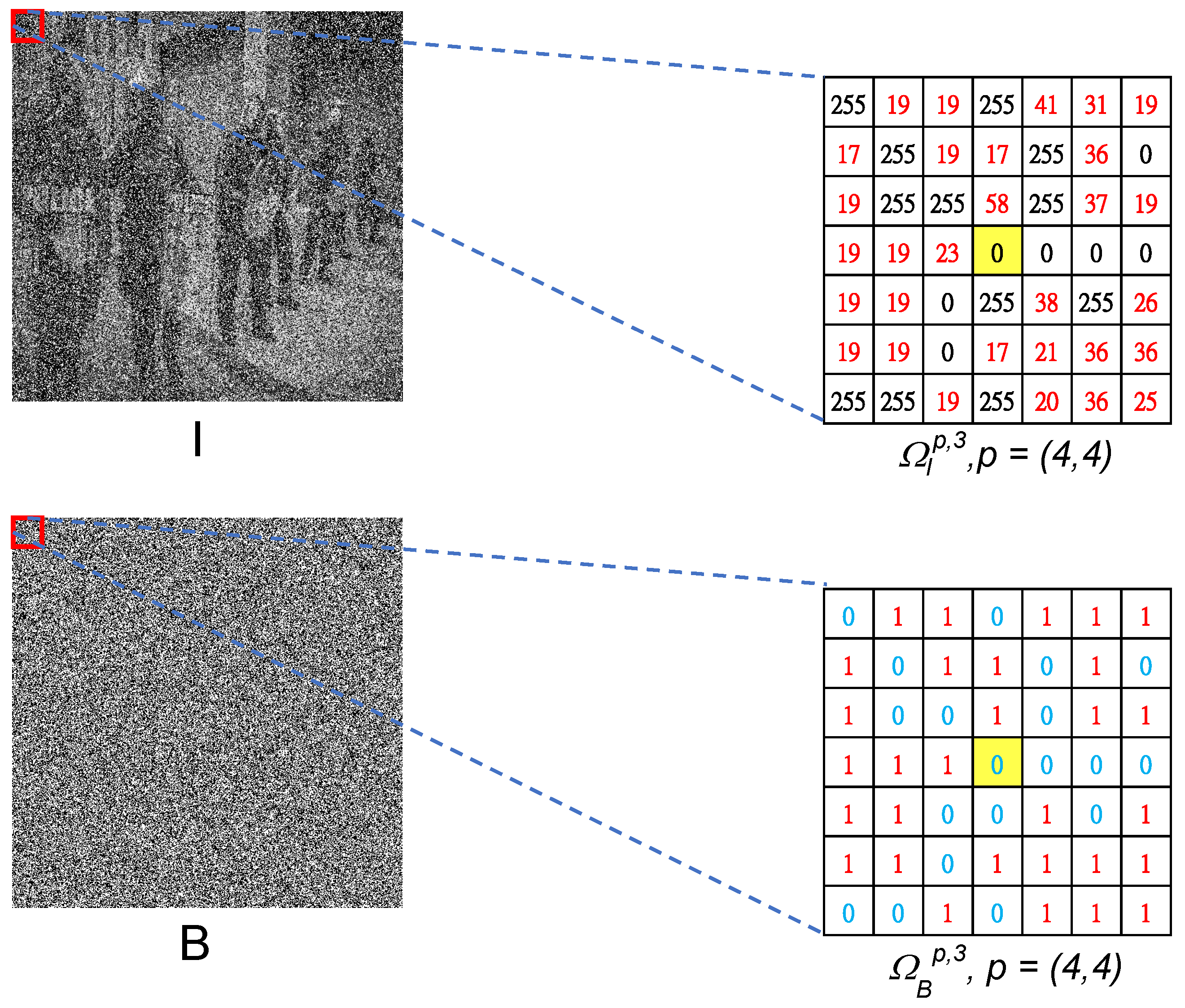
3.1. Adaptive and Overlapped Average Filter (AOAF)
| Algorithm 1 Adaptive and Overlapped Average Filter (AOAF) |
|
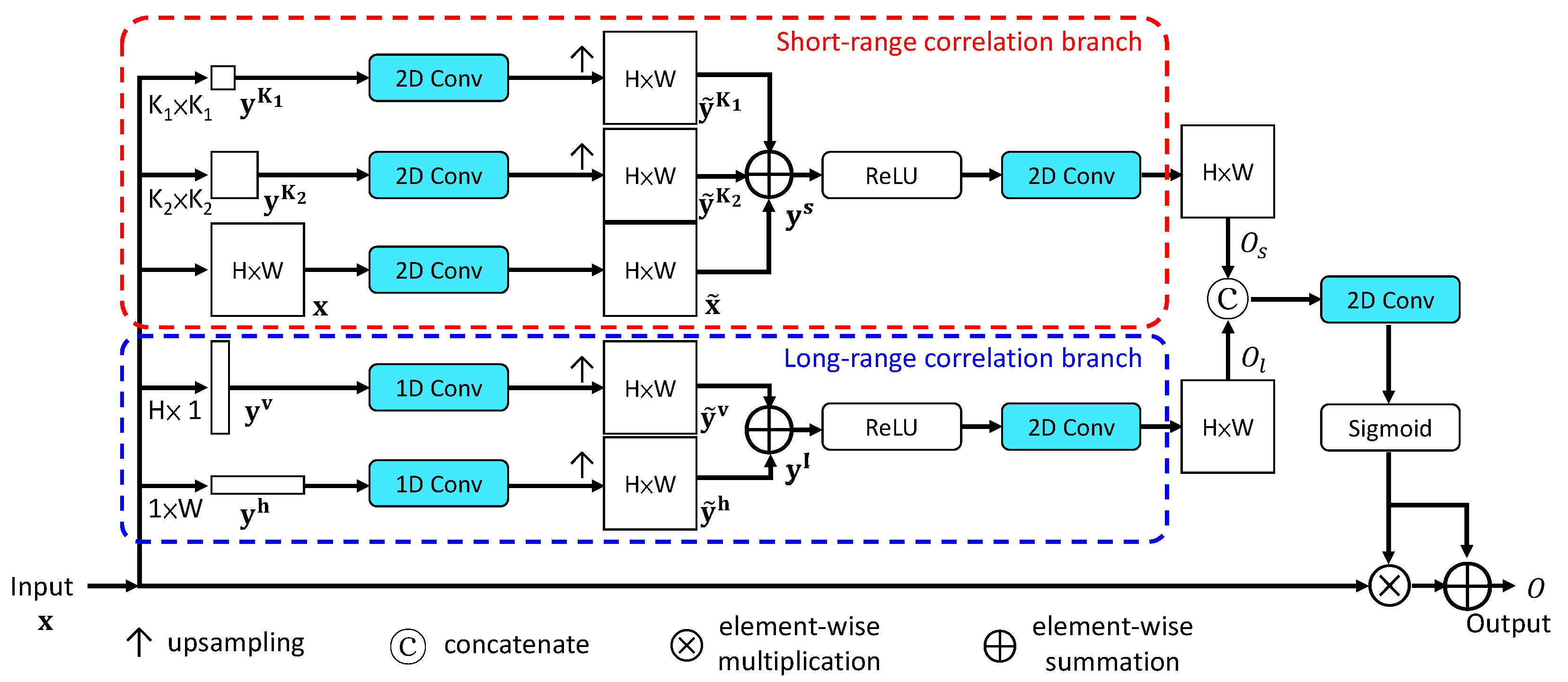
3.2. Mixed-pooling Attention Refinement Networks (MARNs)
4. Experimental Results
4.1. Settings for Training and Testing
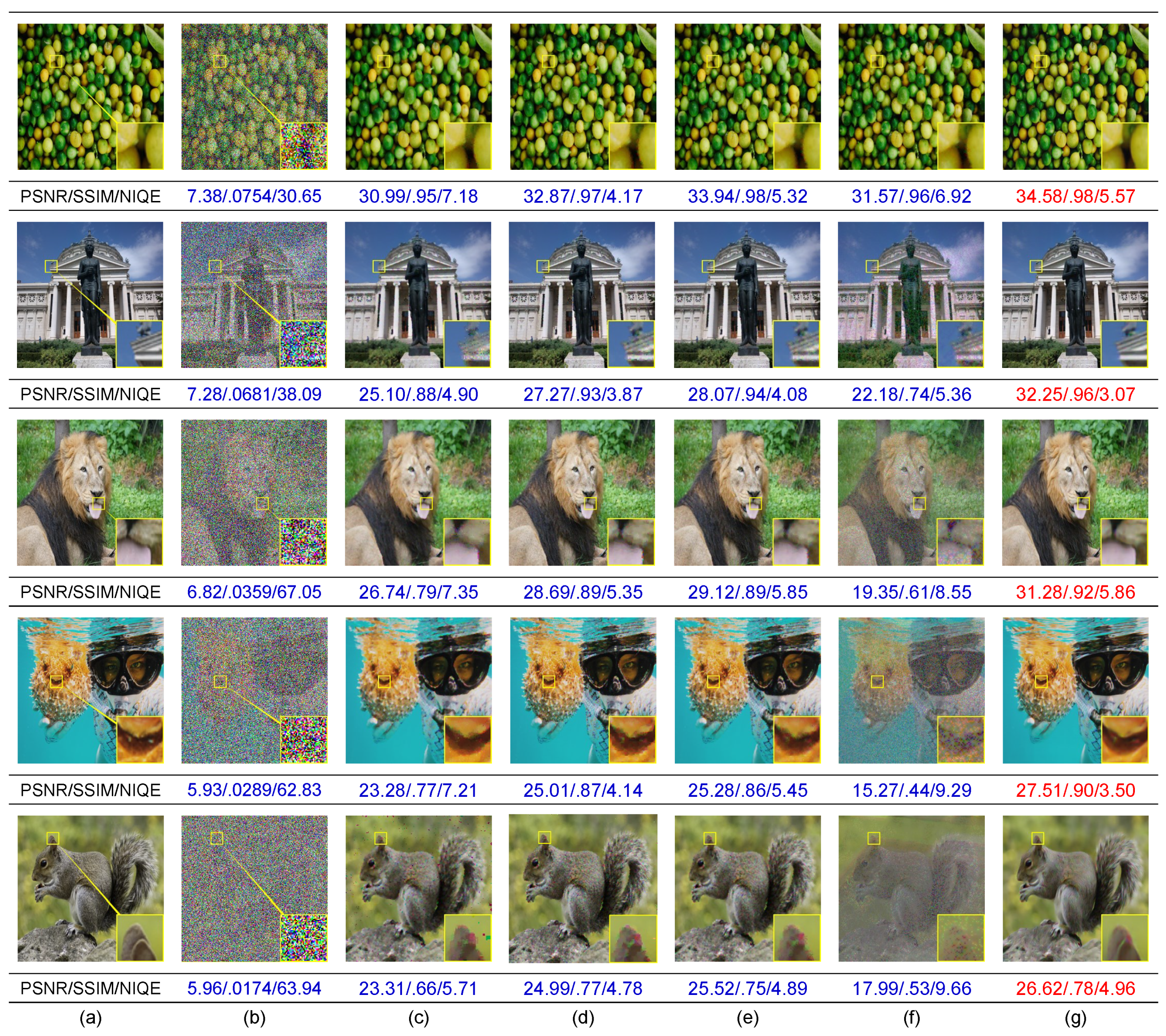
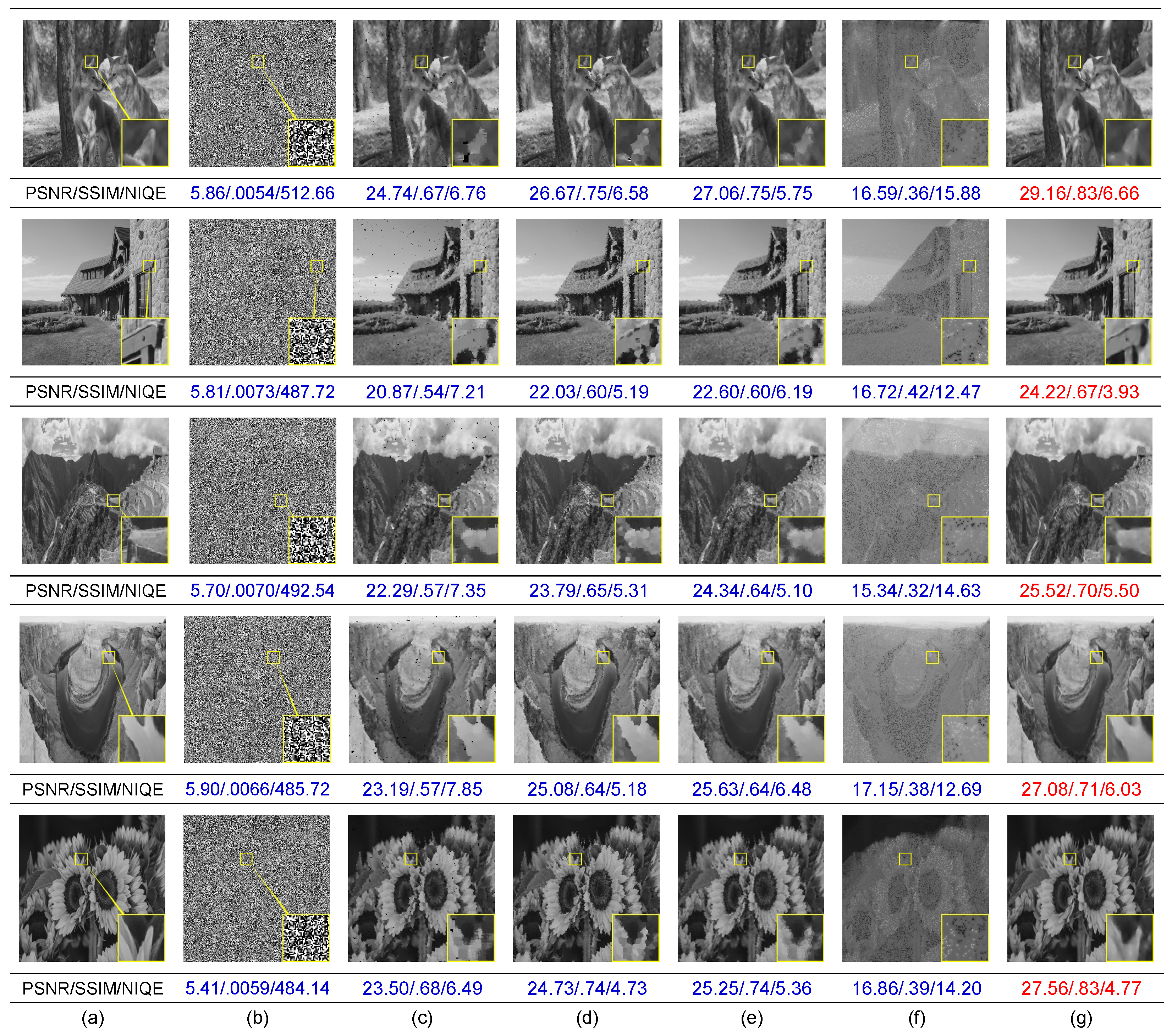
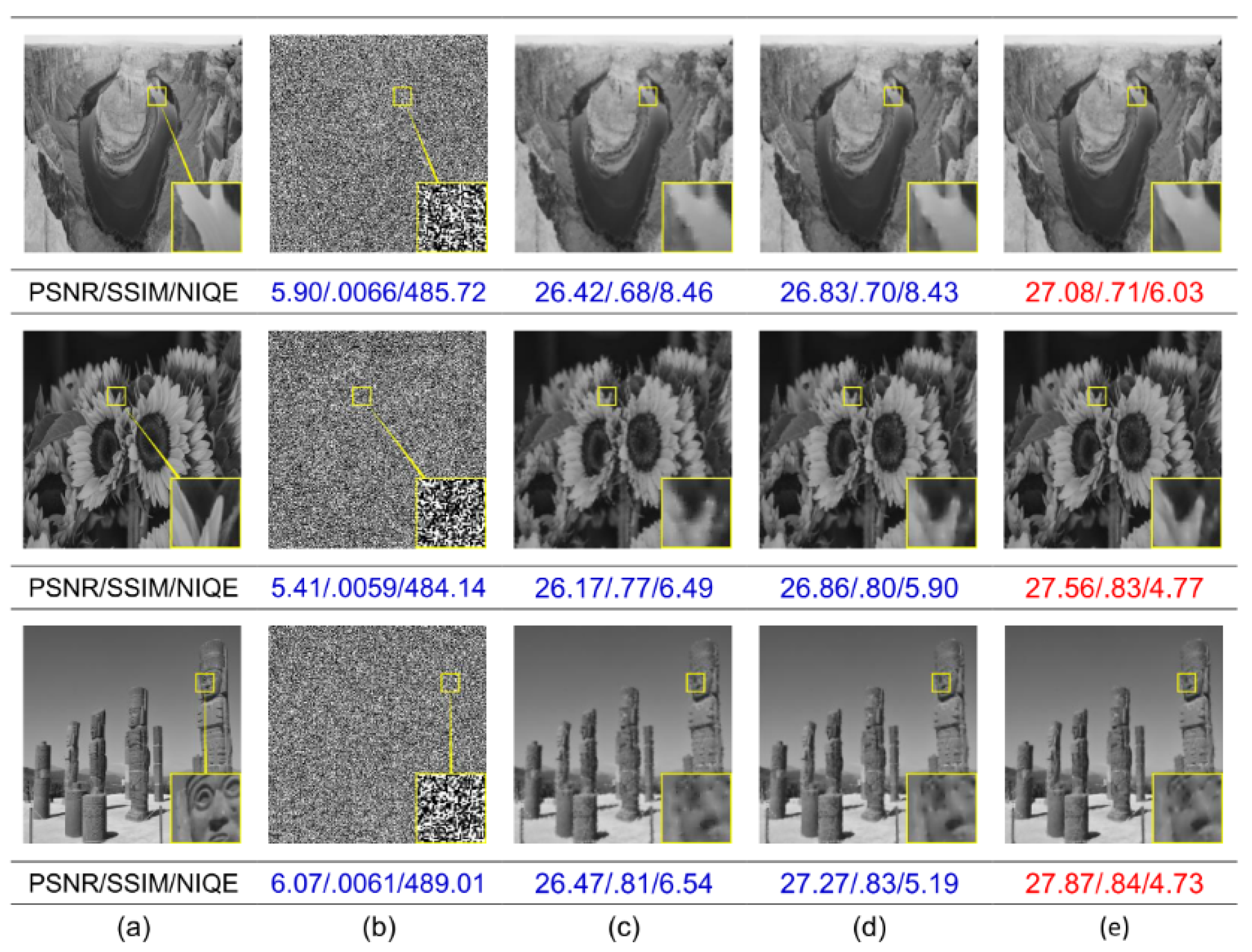
4.2. Comparisons of Benchmark Methods
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AOAF | Adaptive and Overlapped Average |
| MARNs | Mixed-pooling Attention Refinement Network |
| MDBUTMF | Modified Decision-Based Unsymmetrical Trimmed Median Filter |
| DAMF | Different Applied Median Filter |
| FASMF | Fast Adaptive and Selective Mean Filter |
| MMAP | Min-Max Average Pooling |
| CNN | convolutional neural networks |
| NIQE | Natural Image Quality Evaluator |
References
- Huang, S.C.; Peng, Y.T.; Chang, C.H.; Cheng, K.H.; Huang, S.W.; Chen, B.H. Restoration of Images With High-Density Impulsive Noise Based on Sparse Approximation and Ant-Colony Optimization. IEEE Access 2020, 8, 99180–99189. [Google Scholar] [CrossRef]
- Chen, H.J.; Ruan, S.J.; Huang, S.W.; Peng, Y.T. Lung X-ray Segmentation using Deep Convolutional Neural Networks on Contrast-Enhanced Binarized Images. Mathematics 2020, 8, 545. [Google Scholar] [CrossRef]
- Yang, H.; Wang, J.; Miao, Y.; Yang, Y.; Zhao, Z.; Wang, Z.; Sun, Q.; Wu, D.O. Combining spatio-temporal context and Kalman filtering for visual tracking. Mathematics 2019, 7, 1059. [Google Scholar] [CrossRef] [Green Version]
- Astola, J.; Kuosmanen, P. Fundamentals of Nonlinear Digital Filtering; CRC Press: Boca Raton, FL, USA, 1997. [Google Scholar]
- Toh, K.K.V.; Isa, N.A.M. Noise adaptive fuzzy switching median filter for salt-and-pepper noise reduction. Signal Process. Lett. 2009, 17, 281–284. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.; Karim, M.A. A new impulse detector for switching median filters. Signal Process. Lett. 2002, 9, 360–363. [Google Scholar] [CrossRef]
- Ng, P.E.; Ma, K.K. A switching median filter with boundary discriminative noise detection for extremely corrupted images. IEEE Trans. Image Process. 2006, 15, 1506–1516. [Google Scholar] [PubMed]
- Esakkirajan, S.; Veerakumar, T.; Subramanyam, A.N.; PremChand, C. Removal of high density salt and pepper noise through modified decision based unsymmetric trimmed median filter. Signal Process. Lett. 2011, 18, 287–290. [Google Scholar] [CrossRef]
- Erkan, U.; Gökrem, L.; Enginoğlu, S. Different applied median filter in salt and pepper noise. Comput. Electr. Eng. 2018, 70, 789–798. [Google Scholar] [CrossRef]
- Fareed, S.B.S.; Khader, S.S. Fast adaptive and selective mean filter for the removal of high-density salt and pepper noise. IET Image Process. 2018, 12, 1378–1387. [Google Scholar] [CrossRef]
- Satti, P.; Sharma, N.; Garg, B. Min-Max Average Pooling Based Filter for Impulse Noise Removal. Signal Process. Lett. 2020, 27, 1475–1479. [Google Scholar] [CrossRef]
- Chen, F.; Ma, G.; Lin, L.; Qin, Q. Impulsive noise removal via sparse representation. J. Electron. Imaging 2013, 22, 043014. [Google Scholar] [CrossRef]
- Aggarwal, H.K.; Majumdar, A. Exploiting spatiospectral correlation for impulse denoising in hyperspectral images. J. Electron. Imaging 2015, 24, 013027. [Google Scholar] [CrossRef]
- Yin, J.L.; Chen, B.H.; Li, Y. Highly accurate image reconstruction for multimodal noise suppression using semisupervised learning on big data. IEEE Trans. Multimed. 2018, 20, 3045–3056. [Google Scholar] [CrossRef]
- Ulyanov, D.; Vedaldi, A.; Lempitsky, V. Deep image prior. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Guangzhou, China, 23–26 November 2018. [Google Scholar]
- Xing, Y.; Xu, J.; Tan, J.; Li, D.; Zha, W. Deep CNN for removal of salt and pepper noise. IET Image Process. 2019, 13, 1550–1560. [Google Scholar] [CrossRef]
- Laine, S.; Karras, T.; Lehtinen, J.; Aila, T. High-quality self-supervised deep image denoising. In Proceedings of the Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019. [Google Scholar]
- Agustsson, E.; Timofte, R. Ntire 2017 challenge on single image super-resolution: Dataset and study. In Proceedings of the Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Kong, L.; Wen, H.; Guo, L.; Wang, Q.; Han, Y. Improvement of linear filter in image denoising. In Proceedings of the International Conference on Intelligent Earth Observing and Applications 2015, Guilin, China, 23–24 October 2015. [Google Scholar]
- Brownrigg, D.R. The weighted median filter. Commun. ACM 1984, 27, 807–818. [Google Scholar] [CrossRef]
- Tomasi, C.; Manduchi, R. Bilateral filtering for gray and color images. In Proceedings of the Sixth International Conference on Computer Vision (IEEE Cat. No. 98CH36271), Bombay, India, 7 January 1998. [Google Scholar]
- Francis, J.; De Jager, G. The bilateral median filter. In Proceedings of the 14th Annual Symposium of the Pattern Recognition Association of South Africa, Langebaan, South Africa, 27–28 November 2003. [Google Scholar]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hou, Q.; Zhang, L.; Cheng, M.M.; Feng, J. Strip pooling: Rethinking spatial pooling for scene parsing. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020. [Google Scholar]
- Zhou, W. Image quality assessment: From error measurement to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–613. [Google Scholar]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “completely blind” image quality analyzer. Signal Process. Lett. 2012, 20, 209–212. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PSNR↑ | SSIM↑ | NIQE↓ | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noise Level | 50% | 60% | 70% | 80% | 90% | 50% | 60% | 70% | 80% | 90% | 50% | 60% | 70% | 80% | 90% |
| MDBUTMF [8] | 27.85 | 26.87 | 25.91 | 24.84 | 22.04 | 0.86 | 0.82 | 0.78 | 0.73 | 0.61 | 5.77 | 6.95 | 8.05 | 8.23 | 7.55 |
| DAMF [9] | 29.90 | 28.54 | 27.18 | 25.67 | 23.49 | 0.91 | 0.88 | 0.84 | 0.78 | 0.69 | 4.90 | 5.21 | 5.31 | 5.34 | 5.66 |
| FASMF [10] | 30.49 | 29.11 | 27.68 | 26.08 | 24.05 | 0.92 | 0.89 | 0.84 | 0.78 | 0.68 | 5.18 | 5.74 | 6.34 | 6.46 | 5.99 |
| MMAP [11] | 29.94 | 23.71 | 19.34 | 17.49 | 15.78 | 0.90 | 0.68 | 0.49 | 0.41 | 0.35 | 7.15 | 7.97 | 8.97 | 10.92 | 14.69 |
| AOAF | 30.02 | 29.02 | 27.94 | 26.65 | 24.83 | 0.90 | 0.88 | 0.84 | 0.79 | 0.71 | 6.89 | 7.81 | 8.27 | 8.18 | 7.59 |
| AOAF+MARNs | 32.83 | 31.51 | 29.98 | 28.18 | 25.74 | 0.94 | 0.92 | 0.89 | 0.84 | 0.75 | 3.76 | 3.94 | 4.10 | 4.49 | 5.51 |
| PSNR↑ | SSIM↑ | NIQE↓ | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Noise Density | 50% | 60% | 70% | 80% | 90% | 50% | 60% | 70% | 80% | 90% | 50% | 60% | 70% | 80% | 90% |
| AOAF | 30.02 | 29.02 | 27.94 | 26.65 | 24.83 | 0.90 | 0.88 | 0.84 | 0.79 | 0.71 | 6.89 | 7.81 | 8.27 | 8.18 | 7.59 |
| AOAF+Conv | 31.96 | 30.76 | 29.31 | 27.56 | 25.25 | 0.93 | 0.91 | 0.88 | 0.83 | 0.74 | 4.34 | 4.74 | 5.28 | 6.16 | 7.59 |
| AOAF+Conv+MPMs | 32.83 | 31.51 | 29.98 | 28.18 | 25.74 | 0.94 | 0.92 | 0.89 | 0.84 | 0.75 | 3.76 | 3.94 | 4.10 | 4.49 | 5.51 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, M.-H.; Hou, Z.-X.; Cheng, K.-H.; Wu, C.-H.; Peng, Y.-T. Image Denoising Using Adaptive and Overlapped Average Filtering and Mixed-Pooling Attention Refinement Networks. Mathematics 2021, 9, 1130. https://0-doi-org.brum.beds.ac.uk/10.3390/math9101130
Lin M-H, Hou Z-X, Cheng K-H, Wu C-H, Peng Y-T. Image Denoising Using Adaptive and Overlapped Average Filtering and Mixed-Pooling Attention Refinement Networks. Mathematics. 2021; 9(10):1130. https://0-doi-org.brum.beds.ac.uk/10.3390/math9101130
Chicago/Turabian StyleLin, Ming-Hao, Zhi-Xiang Hou, Kai-Han Cheng, Chin-Hsien Wu, and Yan-Tsung Peng. 2021. "Image Denoising Using Adaptive and Overlapped Average Filtering and Mixed-Pooling Attention Refinement Networks" Mathematics 9, no. 10: 1130. https://0-doi-org.brum.beds.ac.uk/10.3390/math9101130