Quality Improvement of Satellite Soil Moisture Products by Fusing with In-Situ Measurements and GNSS-R Estimates in the Western Continental U.S.

 ,
,
Abstract
:1. Introduction
2. Study Area and Data
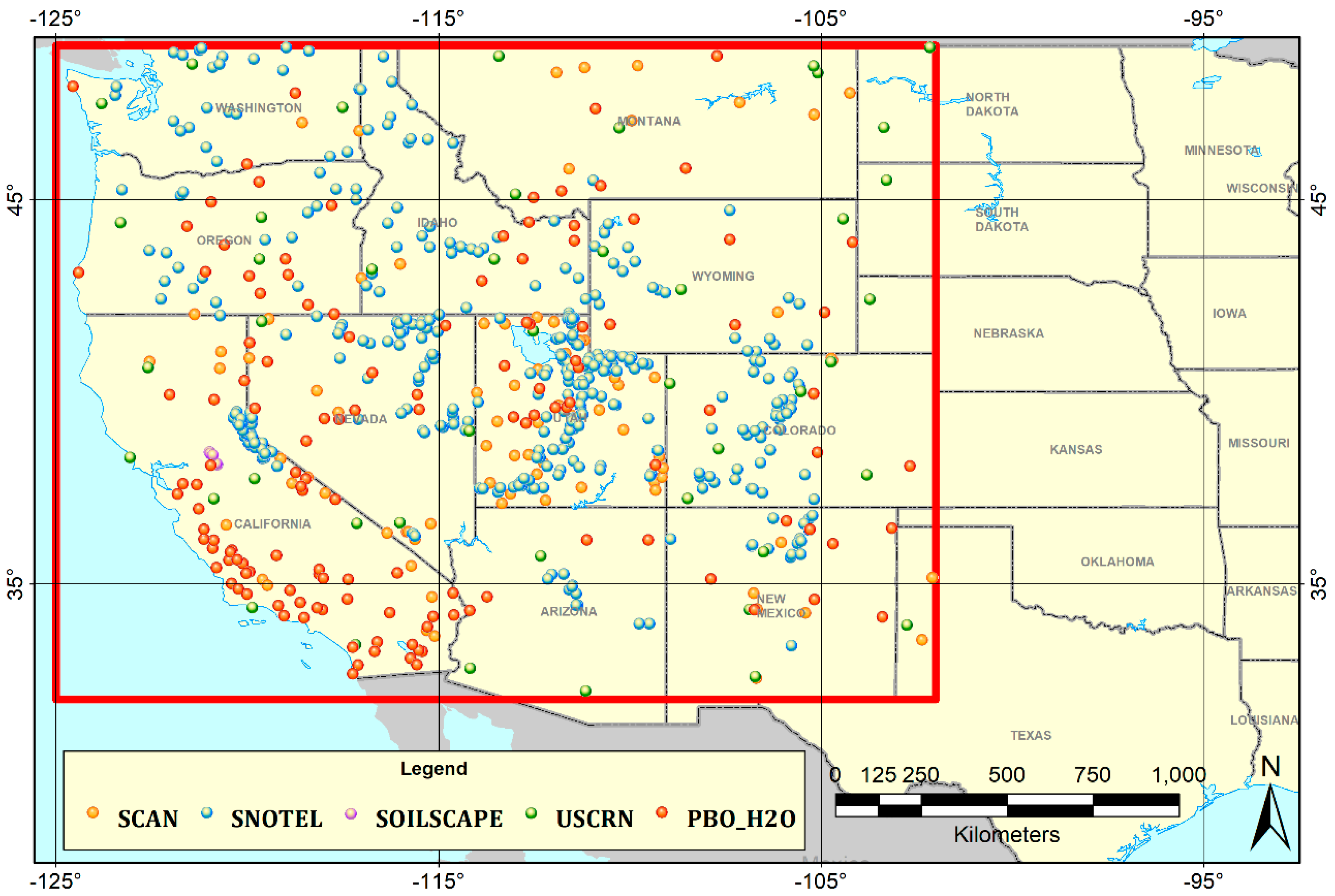
2.1. Study Area
2.2. SMAP SSM Product
2.3. In-Situ SSM Measurements
2.4. GNSS-R SSM Estimates
2.5. Auxiliary Data
2.6. Data Pre-Processing
3. Methodology
3.1. Generalized Regression Neural Network (GRNN) Model for SSM Quality Improvement
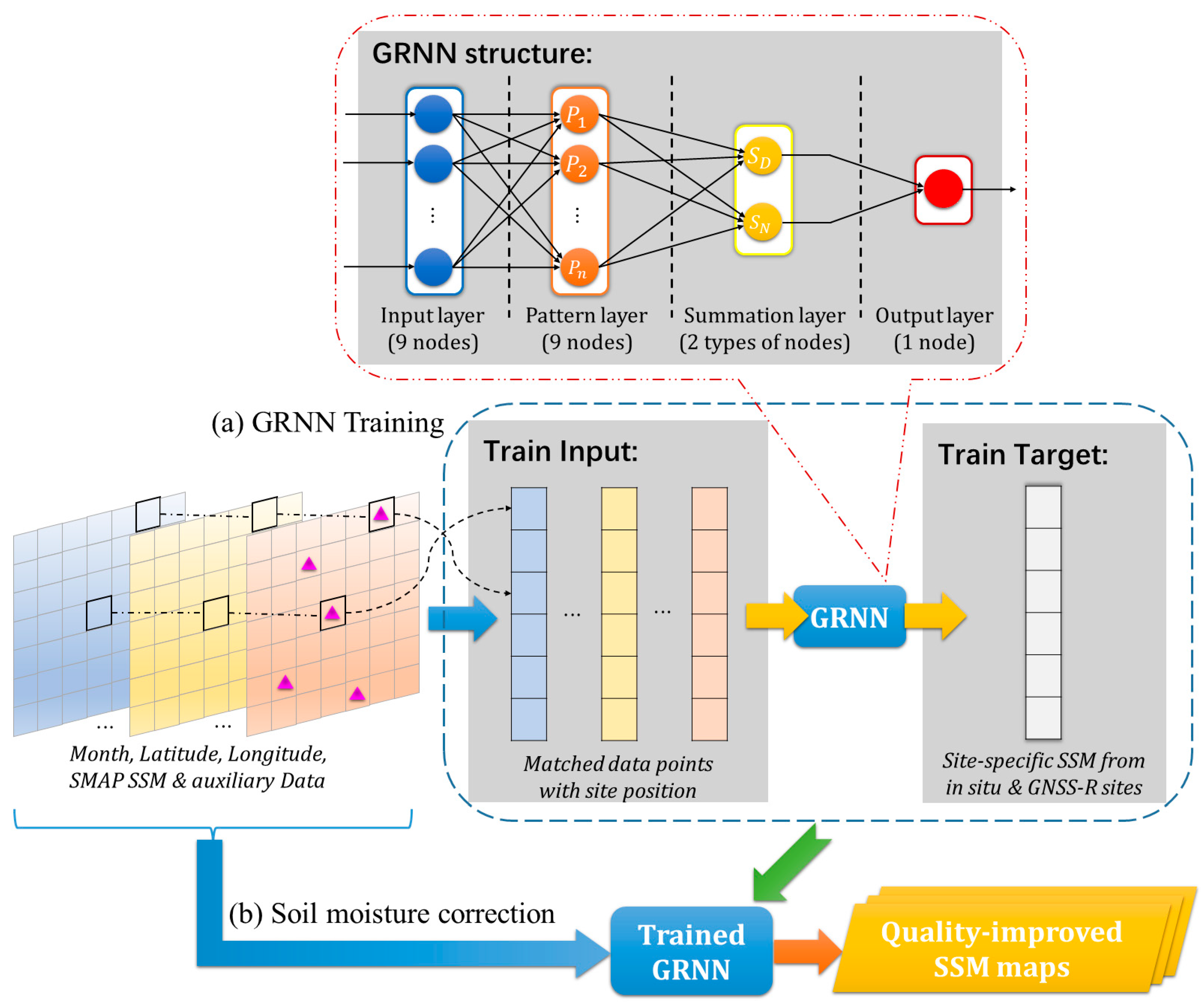
3.1.1. GRNN Model Structure
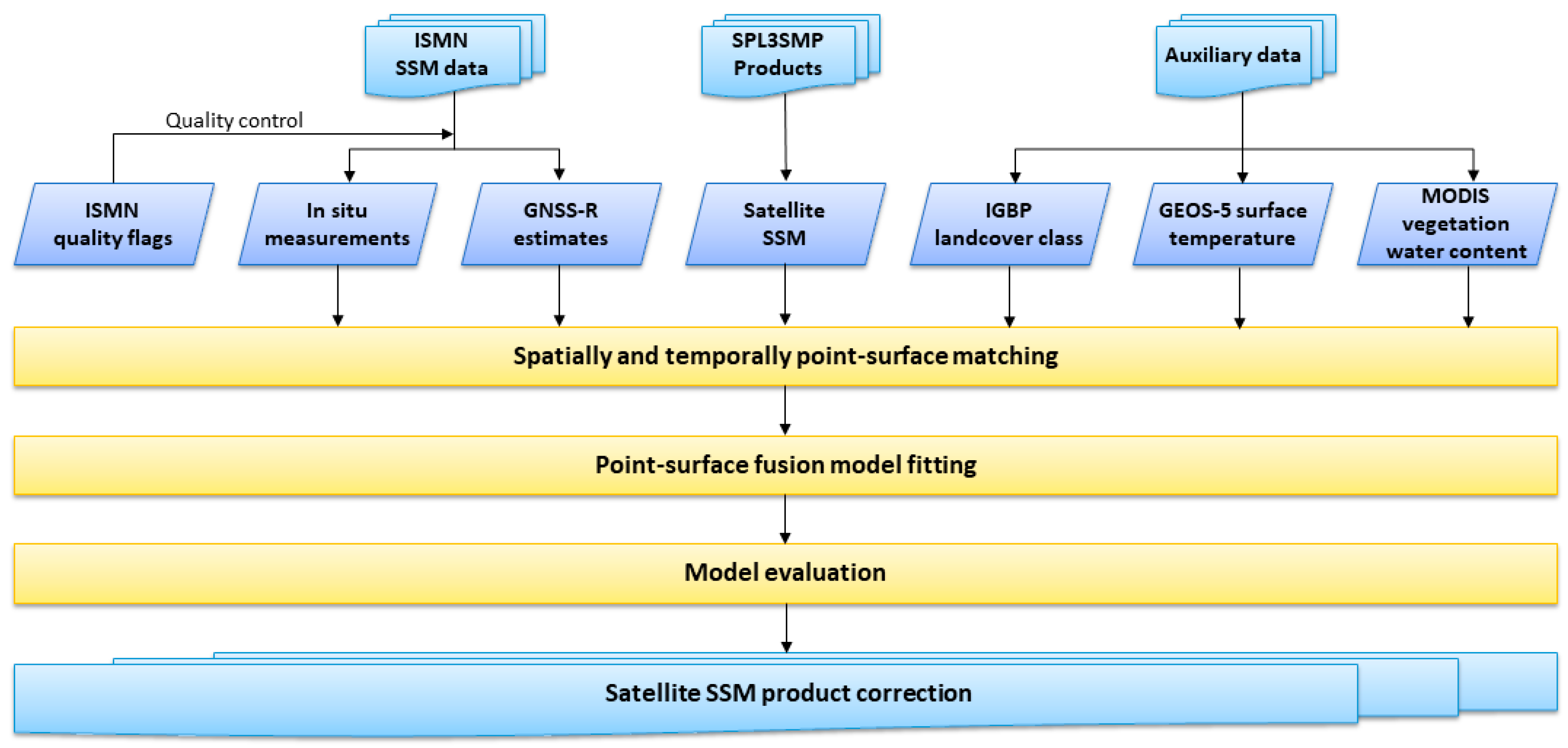
3.1.2. GRNN Model Fusion Procedure for SSM Quality Improvement
3.2. Conventional Methods for Comparison
3.3. Model Evaluation
4. Results and Discussion
4.1. Assessment of the Model
4.1.1. Overall Performance of the Model
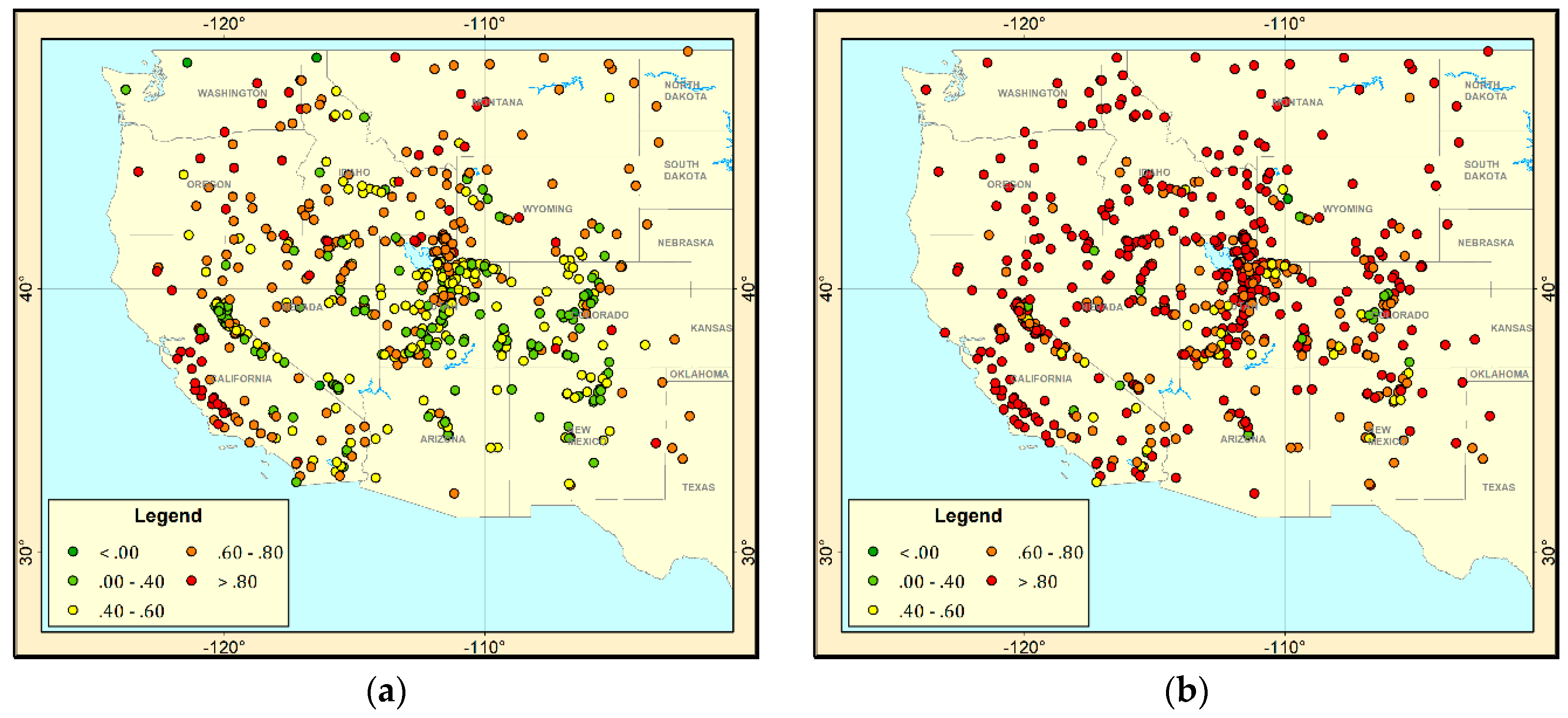
4.1.2. Model Performance for Each Station/Network
4.2. Generation of the Quality-Improved SMAP SSM Product
4.2.1. GRNN-Estimated SSM Time Series over Pixels
4.2.2. Mapping of the Quality-Improved SMAP SSM Product
4.3. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Mccoll, K.A.; Alemohammad, S.H.; Akbar, R.; Konings, A.G.; Yueh, S.; Entekhabi, D. The global distribution and dynamics of surface soil moisture. Nat. Geosci. 2017, 10, 100–104. [Google Scholar] [CrossRef]
- Fischer, E.M.; Seneviratne, S.I.; Lüthi, D.; Schär, C. Contribution of land-atmosphere coupling to recent european summer heat waves. Geophys. Res. Lett. 2007, 34, 125–141. [Google Scholar] [CrossRef]
- Trenberth, K.E. Evaluation of the global atmospheric moisture budget as seen from analyses. J. Clim. 1995, 8, 2255–2280. [Google Scholar] [CrossRef]
- Viterbo, P.; Betts, A.K. Impact of the ECMWF reanalysis soil water on forecasts of the July 1993 Mississippi flood. J. Geophys. Res. Atmos. 1999, 104, 19361–19366. [Google Scholar] [CrossRef] [Green Version]
- Litschi, M. Land-atmosphere coupling and climate change in europe. Nature 2006, 443, 205–209. [Google Scholar]
- Seneviratne, S.I.; Corti, T.; Davin, E.L.; Hirschi, M.; Jaeger, E.B.; Lehner, I.; Orlowsky, B.; Teuling, A.J. Investigating soil moisture–climate interactions in a changing climate: A review. Earth Sci. Rev. 2010, 99, 125–161. [Google Scholar] [CrossRef]
- Williams, C.A.; Albertson, J.D. Soil moisture controls on canopy-scale water and carbon fluxes in an African savanna. Water Resour. Res. 2004, 40, 333–341. [Google Scholar] [CrossRef]
- Kurc, S.A.; Small, E.E. Soil moisture variations and ecosystem-scale fluxes of water and carbon in semiarid grassland and shrubland. Water Resour. Res. 2007, 43, 227–228. [Google Scholar] [CrossRef]
- Rosenzweig, C.; Tubiello, F.N.; Goldberg, R.; Mills, E.; Bloomfield, J. Increased crop damage in the US from excess precipitation under climate change. Glob. Environ. Chang. 2002, 12, 197–202. [Google Scholar] [CrossRef] [Green Version]
- Schmugge, T.; Gloersen, P.; Wilheit, T.; Geiger, F. Remote sensing of soil moisture with microwave radiometers. J. Geophys. Res. 1974, 79, 317–323. [Google Scholar] [CrossRef] [Green Version]
- Entekhabi, D.; Njoku, E.G.; Neill, P.E.O.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (smap) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Al-Yaari, A.; Rodriguez-Fernandez, N.; Parrens, M.; Molero, B.; Leroux, D.; Bircher, S.; Mahmoodi, A.; Mialon, A.; Richaume, P. Overview of smos performance in terms of global soil moisture monitoring after six years in operation. Remote Sens. Environ. 2016, 180, 40–63. [Google Scholar] [CrossRef]
- Albergel, C.; Rosnay, P.D.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modelled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Peng, J.; Niesel, J.; Loew, A.; Zhang, S.; Wang, J. Evaluation of satellite and reanalysis soil moisture products over southwest China using ground-based measurements. Remote Sens. 2015, 7, 15729–15747. [Google Scholar] [CrossRef]
- Dorigo, W.A.; Gruber, A.; Jeu, R.A.M.D.; Wagner, W.; Stacke, T.; Loew, A.; Albergel, C.; Brocca, L.; Chung, D.; Parinussa, R.M. Evaluation of the esa cci soil moisture product using ground-based observations. Remote Sens. Environ. 2015, 162, 380–395. [Google Scholar] [CrossRef]
- Jackson, T.J.; Bindlish, R.; Cosh, M.H.; Zhao, T.; Starks, P.J.; Bosch, D.D.; Seyfried, M.; Moran, M.S.; Goodrich, D.C.; Kerr, Y.H. Validation of soil moisture and ocean salinity (SMOS) soil moisture over watershed networks in the U.S. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1530–1543. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, N.; Martinez-Fernandez, J.; Scaini, A.; Perez-Gutierrez, C. Validation of the SMOS L2 soil moisture data in the REMEDHUS network (Spain). IEEE Trans. Geosci. Remote Sens. 2012, 50, 1602–1611. [Google Scholar] [CrossRef]
- Li, Y.; Grimaldi, S.; Walker, J.P.; Pauwels, V.R.N. Application of remote sensing data to constrain operational rainfall-driven flood forecasting: A review. Remote Sens. 2016, 8, 456. [Google Scholar] [CrossRef]
- Loew, A.; Stacke, T.; Dorigo, W.; Jeu, R.D. Potential and limitations of multidecadal satellite soil moisture observations for climate model evaluation studies. Hydrol. Earth Syst. Sci. 2013, 17, 3523–3542. [Google Scholar] [CrossRef]
- Aghakouchak, A.; Farahmand, A.; Melton, F.S.; Teixeira, J.; Anderson, M.C.; Wardlow, B.D.; Hain, C.R. Remote sensing of drought: Progress, challenges and opportunities. Rev. Geophys. 2015, 53, 452–480. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Crow, W.T.; Ciabatta, L.; Massari, C.; Rosnay, P.D.; Enenkel, M.; Hahn, S.; Amarnath, G.; Camici, S.; Tarpanelli, A. A review of the applications of ascat soil moisture products. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 2285–2306. [Google Scholar] [CrossRef]
- Mohanty, B.P.; Cosh, M.; Lakshmi, V.; Montzka, C. Remote sensing for vadose zone hydrology—A synthesis from the vantage point. Vadose Zone J. 2013, 12, 155–175. [Google Scholar] [CrossRef]
- Burgin, M.S.; Colliander, A.; Njoku, E.G.; Chan, S.K.; Cabot, F.; Kerr, Y.H.; Bindlish, R.; Jackson, T.J.; Entekhabi, D.; Yueh, S.H. A comparative study of the smap passive soil moisture product with existing satellite-based soil moisture products. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2959–2971. [Google Scholar] [CrossRef]
- Entekhabi, D.; Yueh, S.; O’Neill, P.; Kellogg, K.; Allen, A.; Bindlish, R.; Brown, M.; Chan, S.; Colliander, A.; Crow, W. Smap Handbook; JPL Publication JPL 400-1567; Jet Propulsion Laboratory: Pasadena, CA, USA, 2014; p. 182.
- Kerr, Y.; Waldteufel, P.; Richaume, P.; Davenport, I.; Ferrazzoli, P.; Wigneron, J. Smos Level 2 Processor Soil Moisture Algorithm Theoretical Basis Document (atbd). In sm-esl (cbsa), Toulouse. Array Systems Computing Inc.: Toronto, ON, Canada, 2015. Available online: https://earth.esa.int/documents/10174/1854519/SMOS_L2_SM_ATBD (accessed on 20 June 2018).
- Ochsner, T.E.; Cosh, M.H.; Cuenca, R.H.; Dorigo, W.A.; Draper, C.S.; Hagimoto, Y.; Kerr, Y.H.; Njoku, E.G.; Small, E.E.; Zreda, M. State of the art in large-scale soil moisture monitoring. Soil Sci. Soc. Am. J. 2013, 77, 1888–1919. [Google Scholar] [CrossRef] [Green Version]
- Crow, W.T.; Berg, A.A.; Cosh, M.H.; Loew, A.; Mohanty, B.P.; Panciera, R.; Rosnay, P.; Ryu, D.; Walker, J.P. Upscaling sparse ground-based soil moisture observations for the validation of coarse-resolution satellite soil moisture products. Rev. Geophys. 2012, 50. [Google Scholar] [CrossRef] [Green Version]
- Larson, K.M. Gps interferometric reflectometry: Applications to surface soil moisture, snow depth, and vegetation water content in the western United States. Wiley Interdiscip. Rev. Water 2016, 3, 775–787. [Google Scholar] [CrossRef]
- Vey, S.; Güntner, A.; Wickert, J.; Blume, T.; Ramatschi, M. Long-term soil moisture dynamics derived from gnss interferometric reflectometry: A case study for sutherland, South Africa. GPS Solut. 2016, 20, 641–654. [Google Scholar] [CrossRef]
- Small, E.E.; Larson, K.M.; Chew, C.C.; Dong, J.; Ochsner, T.E. Validation of gps-ir soil moisture retrievals: Comparison of different algorithms to remove vegetation effects. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4759–4770. [Google Scholar] [CrossRef]
- Jackson, T.; Colliander, A.; Kimball, J.; Reichle, R.; Crow, W.; Entekhabi, D.; O’Neill, P.; Njoku, E. Soil Moisture Active Passive (Smap) Mission: Science Data Calibration and Validation Plan; jpl d-52544; Nasa Jet Propulsion Lab.: Pasadena, CA, USA, 2012; 99p.
- Larson, K.M.; Small, E.E.; Gutmann, E.D.; Bilich, A.L.; Braun, J.J.; Zavorotny, V.U. Use of gps receivers as a soil moisture network for water cycle studies. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Dorigo, W.A.; Wagner, W.; Hohensinn, R.; Hahn, S.; Paulik, C.; Xaver, A.; Gruber, A.; Drusch, M.; Mecklenburg, S.; Oevelen, P.V. The international soil moisture network: A data hosting facility for global in situ soil moisture measurements. Hydrol. Earth Syst. Sci. 2011, 15, 1675–1698. [Google Scholar] [CrossRef]
- Dorigo, W.A.; Xaver, A.; Vreugdenhil, M.; Gruber, A.; Hegyiová, A.; Sanchis-Dufau, A.D.; Zamojski, D.; Cordes, C.; Wagner, W.; Drusch, M. Global automated quality control of in situ soil moisture data from the international soil moisture network. Vadose Zone J. 2013, 12, 918–924. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, N. Reconstruction of gf-1 soil moisture observation based on satellite and in situ sensor collaboration under full cloud contamination. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5185–5202. [Google Scholar] [CrossRef]
- Xing, C.; Chen, N.; Zhang, X.; Gong, J. A machine learning based reconstruction method for satellite remote sensing of soil moisture images with in situ observations. Remote Sens. 2017, 9, 484. [Google Scholar] [CrossRef]
- Rodríguez-Fernández, N.J.; de Souza, V.; Kerr, Y.H.; Richaume, P.; Al Bitar, A. Soil moisture retrieval using smos brightness temperatures and a neural network trained on in situ measurements. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 1574–1577. [Google Scholar]
- O’Neill, P.; Chan, S.; Njoku, E.; Jackson, T.; Bindlish, R. Smap l3 radiometer global daily 36 km ease-grid soil moisture. Version 2016, 4, R14010. [Google Scholar]
- O’Neill, P.; Njoku, E.; Jackson, T.; Chan, S.; Bindlish, R. Smap Algorithm Theoretical Basis Document: Level 2 & 3 Soil Moisture (Passive) Data Products; JPL D-66480 2015; Jet Propulsion Lab., California Inst. Technol.: Pasadena, CA, USA, 2012. Available online: http://nsidc.org/sites/nsidc.org/files/files/data/smap/pdfs/l2%263_sm_p_v4_oct2012.pdf (accessed on 20 June 2018).
- Colliander, A.; Jackson, T.J.; Bindlish, R.; Chan, S.; Das, N.; Kim, S.B.; Cosh, M.H.; Dunbar, R.S.; Dang, L.; Pashaian, L. Validation of smap surface soil moisture products with core validation sites. Remote Sens. Environ. 2017, 191, 215–231. [Google Scholar] [CrossRef]
- Schaefer, G.L.; Cosh, M.H.; Jackson, T.J. The USDA natural resources conservation service soil climate analysis network (SCAN). J. Atmos. Ocean. Technol. 2007, 24, 2073. [Google Scholar] [CrossRef]
- Leavesley, G.H.; David, O.; Garen, D.C.; Lea, J.; Marron, J.K.; Pagano, T.C.; Perkins, T.R.; Strobel, M.L. A Modeling Framework for Improved Agricultural Water Supply Forecasting. In Proceedings of the AGU Fall Meeting Abstracts, 2008 Fall Meeting, San Francisco, CA, USA, 15–19 December 2008. [Google Scholar]
- Moghaddam, M.; Entekhabi, D.; Goykhman, Y.; Li, K.; Liu, M.; Mahajan, A.; Nayyar, A.; Shuman, D.; Teneketzis, D. A wireless soil moisture smart sensor web using physics-based optimal control: Concept and initial demonstrations. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 522–535. [Google Scholar] [CrossRef]
- Moghaddam, M.; Silva, A.; Clewley, D.; Akbar, R.; Hussaini, S.; Whitcomb, J.; Devarakonda, R.; Shrestha, R.; Cook, R.; Prakash, G. Soil Moisture Profiles and Temperature Data from Soilscape Sites, USA; Ornl DAAC: Oak Ridge, TN, USA, 2016.
- Bell, J.E.; Palecki, M.A.; Baker, C.B.; Collins, W.G.; Lawrimore, J.H.; Leeper, R.D.; Hall, M.E.; Kochendorfer, J.; Meyers, T.P.; Wilson, T.U.S. Climate reference network soil moisture and temperature observations. J. Hydrometeorol. 2013, 14, 977–988. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. Gps multipath and its relation to near-surface soil moisture content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS multipath to measure soil moisture fluctuations: Initial results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Belward, A.S. The IGBP-DIS global 1-km land-cover data set DIS-cover: A project overview. Photogramm. Eng. Remote Sens. 1999, 65, 1013–1020. [Google Scholar]
- Koster, R.D.; Suarez, M.J.; Ducharne, A.; Stieglitz, M.; Kumar, P. A catchment-based approach to modeling land surface processes in a general circulation model: 1. Model structure. J. Geophys. Res. Atmos. 2000, 105, 24809–24822. [Google Scholar] [CrossRef] [Green Version]
- Ducharne, A.; Koster, R.D.; Suarez, M.J.; Stieglitz, M.; Kumar, P. A catchment-based approach to modeling land surface processes in a general circulation model: 2. Parameter estimation and model demonstration. J. Geophys. Res. Atmos. 2000, 105, 24823–24838. [Google Scholar] [CrossRef] [Green Version]
- Wigneron, J.-P.; Chanzy, A.; Calvet, J.-C.; Bruguier, N. A simple algorithm to retrieve soil moisture and vegetation biomass using passive microwave measurements over crop fields. Remote Sens. Environ. 1995, 51, 331–341. [Google Scholar] [CrossRef]
- Specht, D.F. A general regression neural network. IEEE Trans. Neural Netw. 1991, 2, 568–576. [Google Scholar] [CrossRef] [PubMed]
- Specht, D.F. The general regression neural network-rediscovered. Neural Netw. 1993, 6, 1033–1034. [Google Scholar] [CrossRef]
- Cheng, B.; Titterington, D.M. Neural networks: A review from a statistical perspective. Stat. Sci. 1994, 9, 2–30. [Google Scholar] [CrossRef]
- Li, T.; Shen, H.; Zeng, C.; Yuan, Q.; Zhang, L. Point-surface fusion of station measurements and satellite observations for mapping PM2.5 distribution in China: Methods and assessment. Atmos. Environ. 2017, 152, 477–489. [Google Scholar] [CrossRef]
- Reich, S.L.; Gomez, D.; Dawidowski, L. Artificial neural network for the identification of unknown air pollution sources. Atmos. Environ. 1999, 33, 3045–3052. [Google Scholar] [CrossRef]
- Gardner, M.W.; Dorling, S. Artificial neural networks (the multilayer perceptron)—A review of applications in the atmospheric sciences. Atmos. Environ. 1998, 32, 2627–2636. [Google Scholar] [CrossRef]
- Rodriguez, J.D.; Perez, A.; Lozano, J.A. Sensitivity analysis of k-fold cross validation in prediction error estimation. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 569–575. [Google Scholar] [CrossRef] [PubMed]
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W.T. Performance metrics for soil moisture retrievals and application requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Stoffelen, A. Toward the true near-surface wind speed: Error modeling and calibration using triple collocation. J. Geophys. Res. Oceans 1998, 103, 7755–7766. [Google Scholar] [CrossRef] [Green Version]
- McColl, K.A.; Vogelzang, J.; Konings, A.G.; Entekhabi, D.; Piles, M.; Stoffelen, A. Extended triple collocation: Estimating errors and correlation coefficients with respect to an unknown target. Geophys. Res. Lett. 2014, 41, 6229–6236. [Google Scholar] [CrossRef] [Green Version]
- Gruber, A.; Su, C.-H.; Zwieback, S.; Crow, W.; Dorigo, W.; Wagner, W. Recent advances in (soil moisture) triple collocation analysis. Int. J. Appl. Earth Obs. Geoinf. 2016, 45, 200–211. [Google Scholar] [CrossRef]
- Aires, F.; Prigent, C.; Rossow, W. Sensitivity of satellite microwave and infrared observations to soil moisture at a global scale: 2. Global statistical relationships. J. Geophys. Res. Atmos. 2005, 110. [Google Scholar] [CrossRef] [Green Version]
- Kolassa, J.; Gentine, P.; Prigent, C.; Aires, F. Soil moisture retrieval from AMSR-E and ASCAT microwave observation synergy. Part 1: Satellite data analysis. Remote Sens. Environ. 2016, 173, 1–14. [Google Scholar] [CrossRef]
- Pan, X.; Kornelsen, K.C.; Coulibaly, P. Estimating root zone soil moisture at continental scale using neural networks. JAWRA J. Am. Water Resour. Assoc. 2017, 53, 220–237. [Google Scholar] [CrossRef]
- Alemohammad, S.H.; Kolassa, J.; Prigent, C.; Aires, F.; Gentine, P. Global downscaling of remotely-sensed soil moisture using neural networks. Hydrol. Earth Syst. Sci. 2018. under review. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | # of Stations | Avail. Time | Depth (cm) | Temp. Resol. | Sensor |
|---|---|---|---|---|---|
| SCAN | 81 | 1996/01– present | 5.08 | Hourly | Hydra Probe Digital SDI-12 (2.5 volt) Hydra Probe Analog (2.5 volt) |
| SNOTEL | 381 | 1980/10– present | 5 | Hourly | Hydra Probe Analog (5.0 volt) Hydra Probe Analog (2.5 volt) Hydra Probe Digital SDI-12 (2.5 volt) |
| SoilSCAPE | 78 | 2011/08– present | 5 | Hourly | EC5 |
| USCRN | 44 | 2000/11– present | 5 | Hourly | Stevens Hydra Probe II SDI-12 |
| PBO H2O | 135 | 2004/09– present | 0–5 | Daily | GPS |
| Used SMAP SSM Values | Method | Model Fitting | Cross-Validation | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R | RMSE | bias | ub RMSE | R | RMSE | bias | ub RMSE | |||
| sm_sat-whole | MLR | 0.50 | 0.086 | 0.000 | 0.086 | 0.50 | 0.086 | 0.000 | 0.086 | |
| BPNN | 0.76 | 0.065 | 0.000 | 0.065 | 0.75 | 0.066 | 0.000 | 0.065 | ||
| GRNN | 0.90 | 0.045 | 0.001 | 0.044 | 0.87 | 0.050 | 0.001 | 0.050 | ||
| sm_sat-rcmd | MLR | 0.58 | 0.074 | 0.000 | 0.074 | 0.58 | 0.074 | 0.000 | 0.074 | |
| BPNN | 0.78 | 0.057 | 0.000 | 0.058 | 0.77 | 0.059 | 0.000 | 0.059 | ||
| GRNN | 0.91 | 0.038 | 0.000 | 0.037 | 0.87 | 0.045 | 0.001 | 0.045 | ||
| Network | Before Fusion | After Fusion | |||||||
|---|---|---|---|---|---|---|---|---|---|
| R | RMSE | bias | ub RMSE | R | RMSE | bias | ub RMSE | ||
| SCAN | 0.57 | 0.076 | −0.004 | 0.050 | 0.77 | 0.046 | 0.011 | 0.036 | |
| SNOTEL | 0.50 | 0.129 | −0.027 | 0.079 | 0.80 | 0.071 | −0.004 | 0.053 | |
| SoilSCAPE | 0.82 | 0.082 | 0.019 | 0.048 | 0.88 | 0.052 | 0.003 | 0.037 | |
| USCRN | 0.67 | 0.101 | 0.033 | 0.050 | 0.87 | 0.033 | 0.003 | 0.029 | |
| PBO H2O | 0.69 | 0.081 | −0.006 | 0.053 | 0.82 | 0.042 | 0.002 | 0.038 | |
| Used SMAP SSM Values | Method | Model Fitting | Cross-Validation | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| R | RMSE | bias | ub RMSE | R | RMSE | bias | ub RMSE | |||
| sm_sat-whole | MLR | - | - | - | - | - | - | - | - | |
| BPNN | 0.67 | 0.074 | 0.000 | 0.074 | 0.67 | 0.074 | 0.000 | 0.074 | ||
| GRNN | 0.69 | 0.072 | 0.001 | 0.071 | 0.69 | 0.073 | 0.001 | 0.073 | ||
| sm_sat-rcmd | MLR | - | - | - | - | - | - | - | - | |
| BPNN | 0.69 | 0.066 | 0.000 | 0.066 | 0.69 | 0.066 | 0.000 | 0.066 | ||
| GRNN | 0.72 | 0.064 | 0.001 | 0.063 | 0.70 | 0.065 | 0.001 | 0.065 | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Yuan, Q.; Li, T.; Shen, H.; Zhang, L.; Jiang, H. Quality Improvement of Satellite Soil Moisture Products by Fusing with In-Situ Measurements and GNSS-R Estimates in the Western Continental U.S. Remote Sens. 2018, 10, 1351. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10091351
Xu H, Yuan Q, Li T, Shen H, Zhang L, Jiang H. Quality Improvement of Satellite Soil Moisture Products by Fusing with In-Situ Measurements and GNSS-R Estimates in the Western Continental U.S. Remote Sensing. 2018; 10(9):1351. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10091351
Chicago/Turabian StyleXu, Hongzhang, Qiangqiang Yuan, Tongwen Li, Huanfeng Shen, Liangpei Zhang, and Hongtao Jiang. 2018. "Quality Improvement of Satellite Soil Moisture Products by Fusing with In-Situ Measurements and GNSS-R Estimates in the Western Continental U.S." Remote Sensing 10, no. 9: 1351. https://0-doi-org.brum.beds.ac.uk/10.3390/rs10091351