Area-Based Dense Image Matching with Subpixel Accuracy for Remote Sensing Applications: Practical Analysis and Comparative Study



Abstract
:
1. Introduction
2. Dense Image Matching
2.1. Overall Workflow
2.2. Similarity Measures
2.3. Subpixel Image Matching Methods
3. Experimental Details
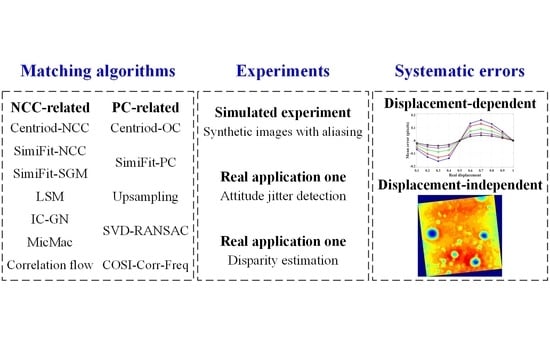
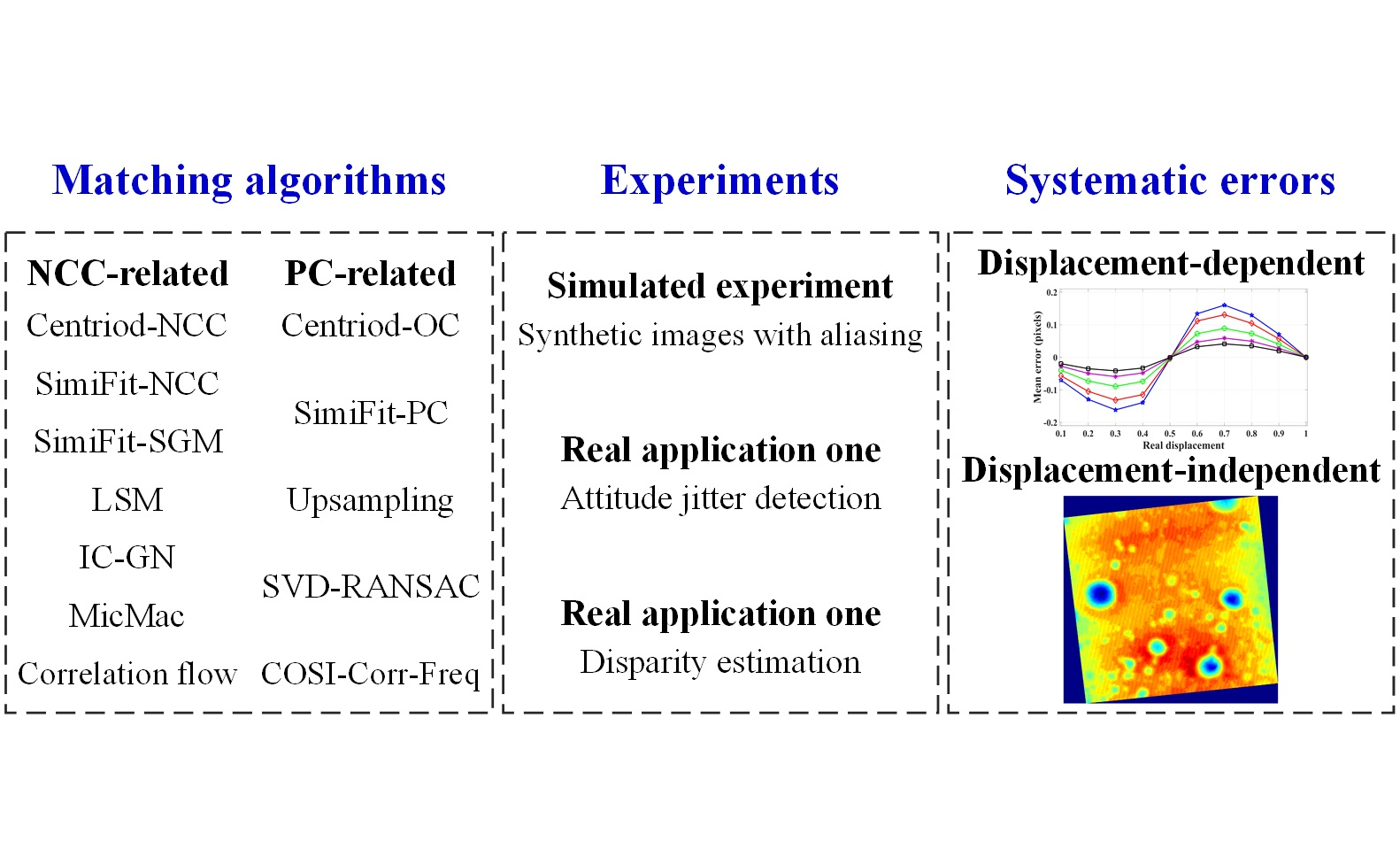
3.1. Algorithmic Implementations
- (1)
- Centroid-NCC. This algorithm calculated the correlation function within the search range using NCC and estimated the subpixel displacements using Equation (5) in a 5 × 5 neighborhood around the initial peak for each matching position. The correlation values below the mean value were not considered. The implementation in the ImGRAFT toolbox [41] was used in this study.
- (2)
- SimiFit-NCC. This algorithm estimated the subpixel displacements for each matching position by fitting the NCC correlation values to a quadratic curve in x and y direction independently. The implementation in COSI-Corr [7] called “statistic correlator” was used.
- (3)
- SimiFit-SGM. This algorithm also utilized quadratic function fitting, while the fitting object was the matching costs of a global discrete optimization algorithm instead. The implementation in the Ames Stereo Pipeline (ASP) [42] was used. The dense matching was implemented using a two-stage coarse-to-fine process. The costs were calculated using a variant of semi-global matching [25], which was extended to a 2-D disparity search and to update the costs using the information from more directions that could reduce the streaking artifacts [64].
- (4)
- LSM. This algorithm iteratively updated the 8-parameters vector by solving Equation (11) via least-squares adjustment until the new NCC value would not increase. The initial displacements were provided by the conventional NCC matching.
- (5)
- IC-GN. This algorithm directly optimized the ZNSSD similarity measure between two patches and solved the parameters of first-order mapping function by the iterative Gauss–Newton algorithm. The ZNSSD similarity measure was related to NCC according to Equation (3). An inverse compositional scheme with higher computational efficiency and robustness was employed, which iteratively solved for an incremental warp rather than an additive update to the parameter vector, and inverted the roles of the reference image and template image [60]. The implementation in Ncorr [43] was used. A reliability-guided strategy was adopted to guide the correlation and provide initial guesses for the following positions [65].
- (6)
- MicMac. The 2-D dense image matching algorithm implemented in MicMac calculated displacements for every position defined by the discretization step and intensity interpolation [27]. With the subpixel step, this algorithm optimized an energy function, including data term and regularization term, using multi-directional dynamic programming [66]. The data term was constructed using non-linear matching costs based on NCC.
- (7)
- Correlation flow. This is an optical flow algorithm that solves a global energy function in the form of Equation (13) [44]. In order to overcome the difficulty in integrating NCC in this variational framework, a correlation transform was separately performed on each image according to the relationship in Equation (3), and the data term was computed as the sum of squared differences between the correlation transforms. The variational framework employed a non-local regularization term and was optimized based on the projected-proximal-point algorithm in a coarse-to-fine warping strategy [44].
- (8)
- Centroid-OC. This algorithm is similar to Centroid-NCC but employed OC [67] that is a PC-related similarity measure. OC can be regarded as a different type of normalization compared to PC, which performs cross-correlation in the frequency domain on the complex orientation images calculated from the orientation of intensity gradient.
- (9)
- SimiFit-PC. According to the 1-D peak fitting model in Equation (8), this algorithm found the subpixel peak locations of PC correlation function from multiple tri-tuples consisting of the initial peak and its corresponding surrounding points, without the need of iteration [45]. A low-pass Gaussian function was additionally used on the normalized cross-power spectrum for spectral weighting.
- (10)
- Upsampling. This algorithm directly resampled the PC similarity values to a higher resolution based on the matrix-multiplication implementation of discrete Fourier transform [20], as shown in Equation (9). A 1.5 × 1.5 pixels local neighborhood around the initial peak was upsampled with a factor of 200.
- (11)
- SVD-RANSAC. This algorithm estimated the subpixel displacements from the phase angle of domain singular vectors of normalized cross-power spectrum matrix by robust line fitting using a unified random sample consensus algorithm [46]. The frequency masking and a fringe filter with a size of 5 × 5 pixels were additionally applied to improve the robustness.
- (12)
- COSI-Corr-Freq. The implementation of “frequency correlator” in COSI-Corr [7] estimated the subpixel displacements by minimizing Equation (15) using the two-point step size algorithm with the initial values from peak centroid. The frequency weighting matrix was adaptively determined based on the magnitude of normalized log-spectrum, and the correlation was iterated five times with the normalized cross-power spectrum matrix and the frequency weighting matrix adjusted in each iteration.
3.2. Experimental Settings
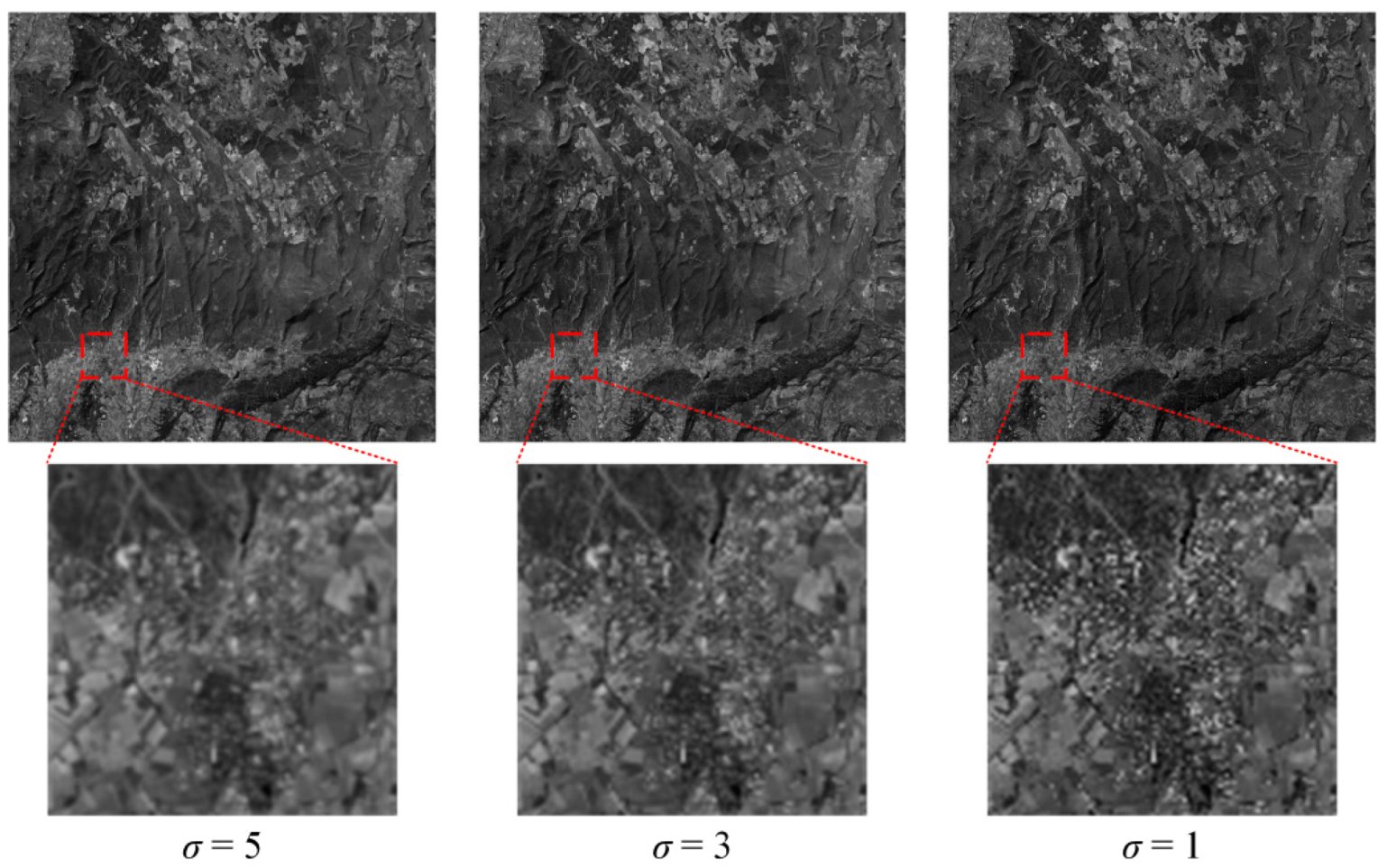
3.2.1. Simulated Experiment
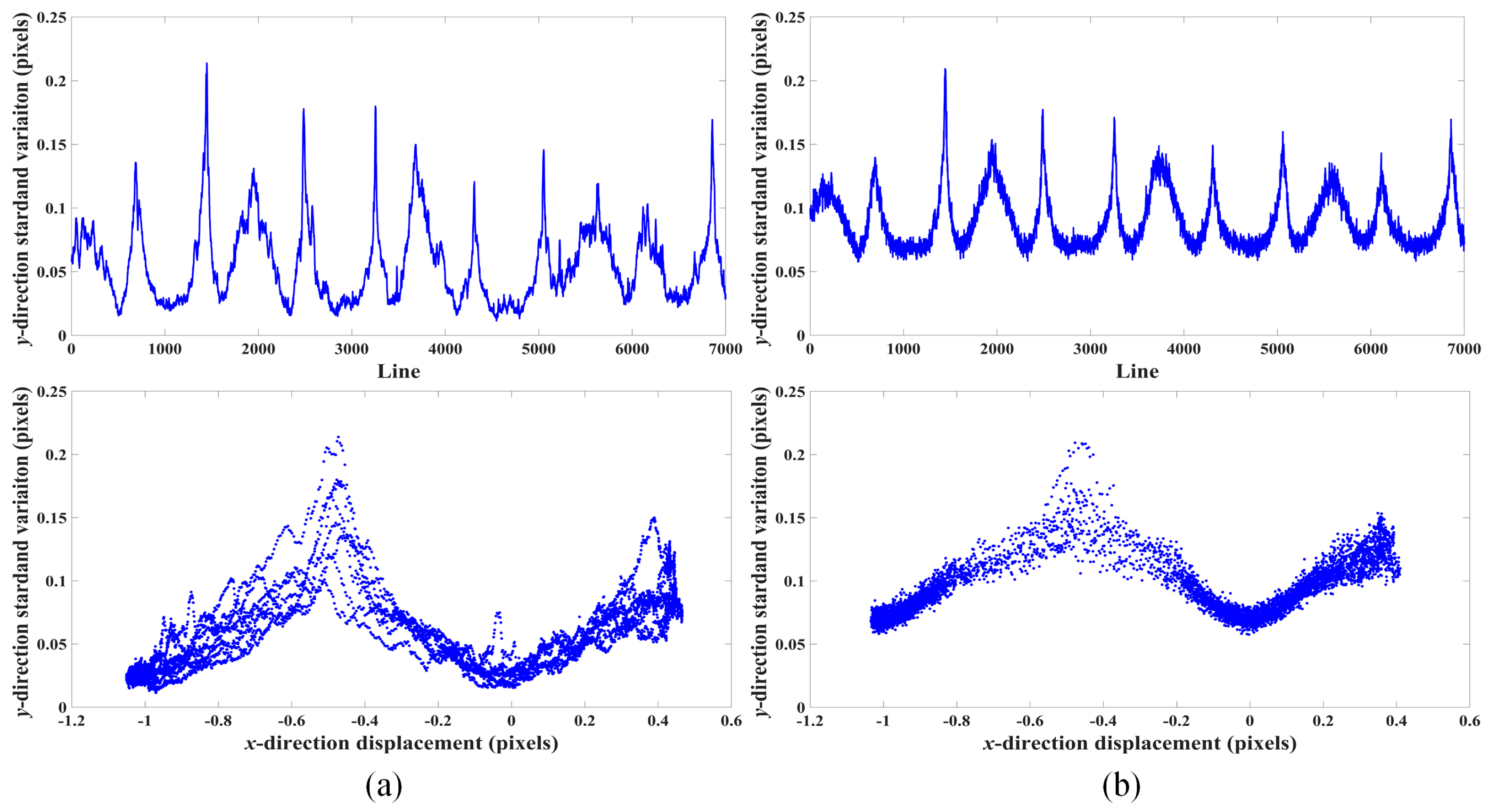
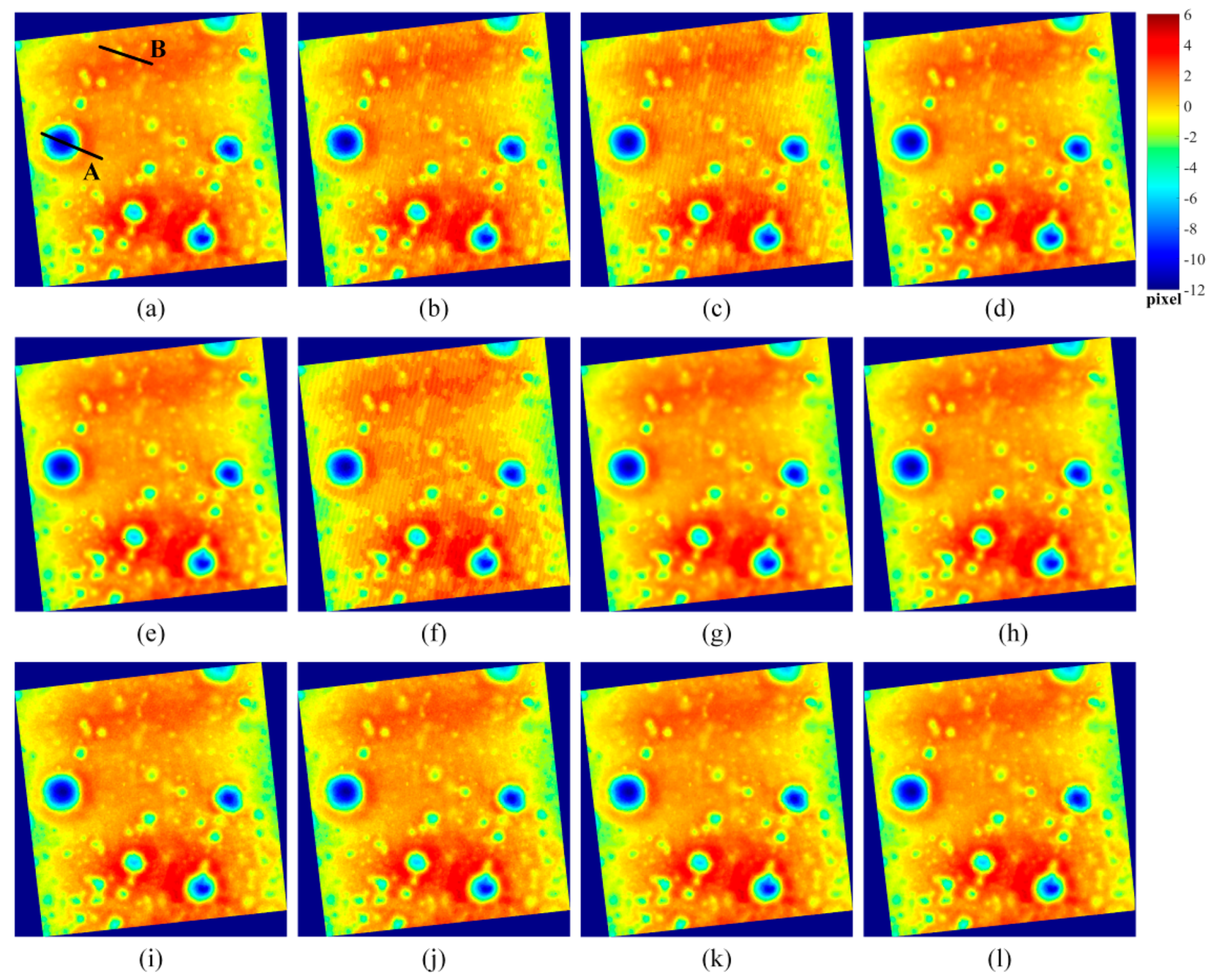
3.2.2. Real Application One: Attitude Jitter Detection
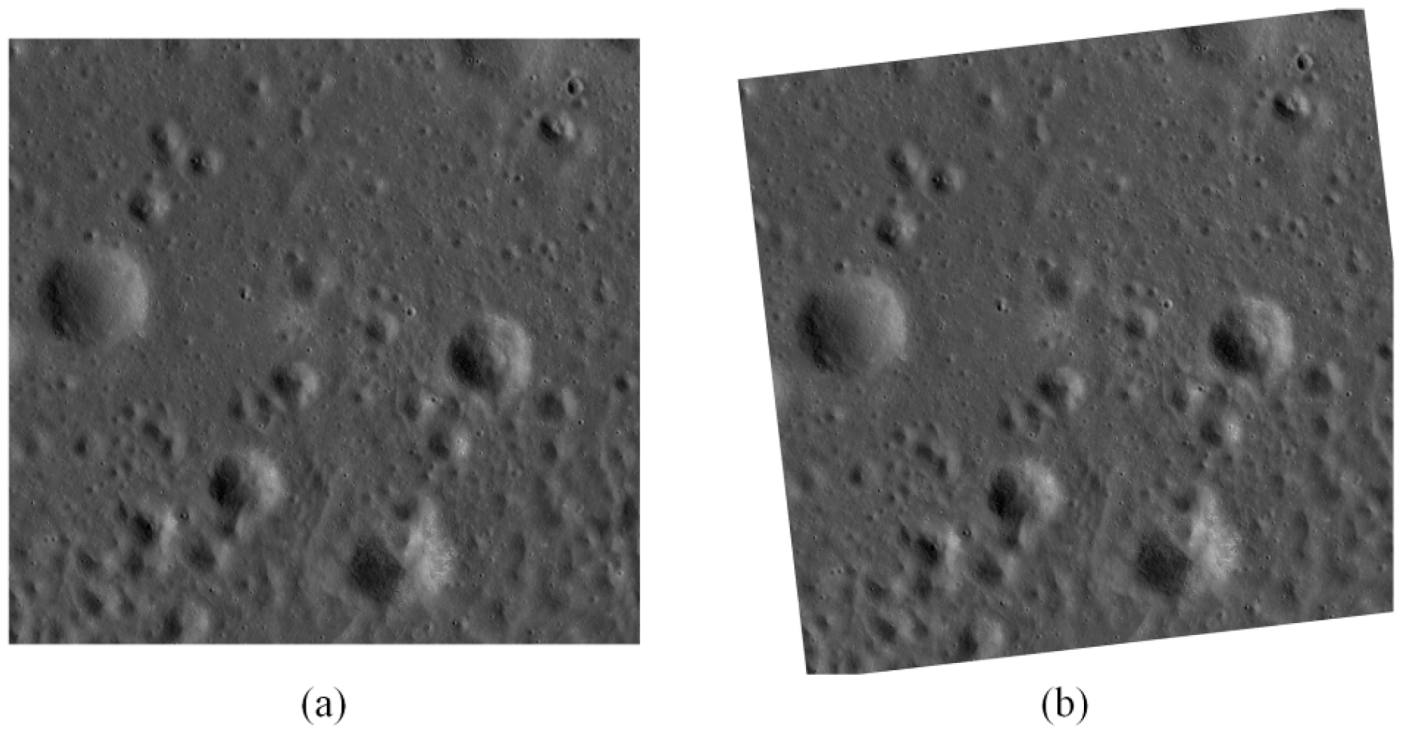
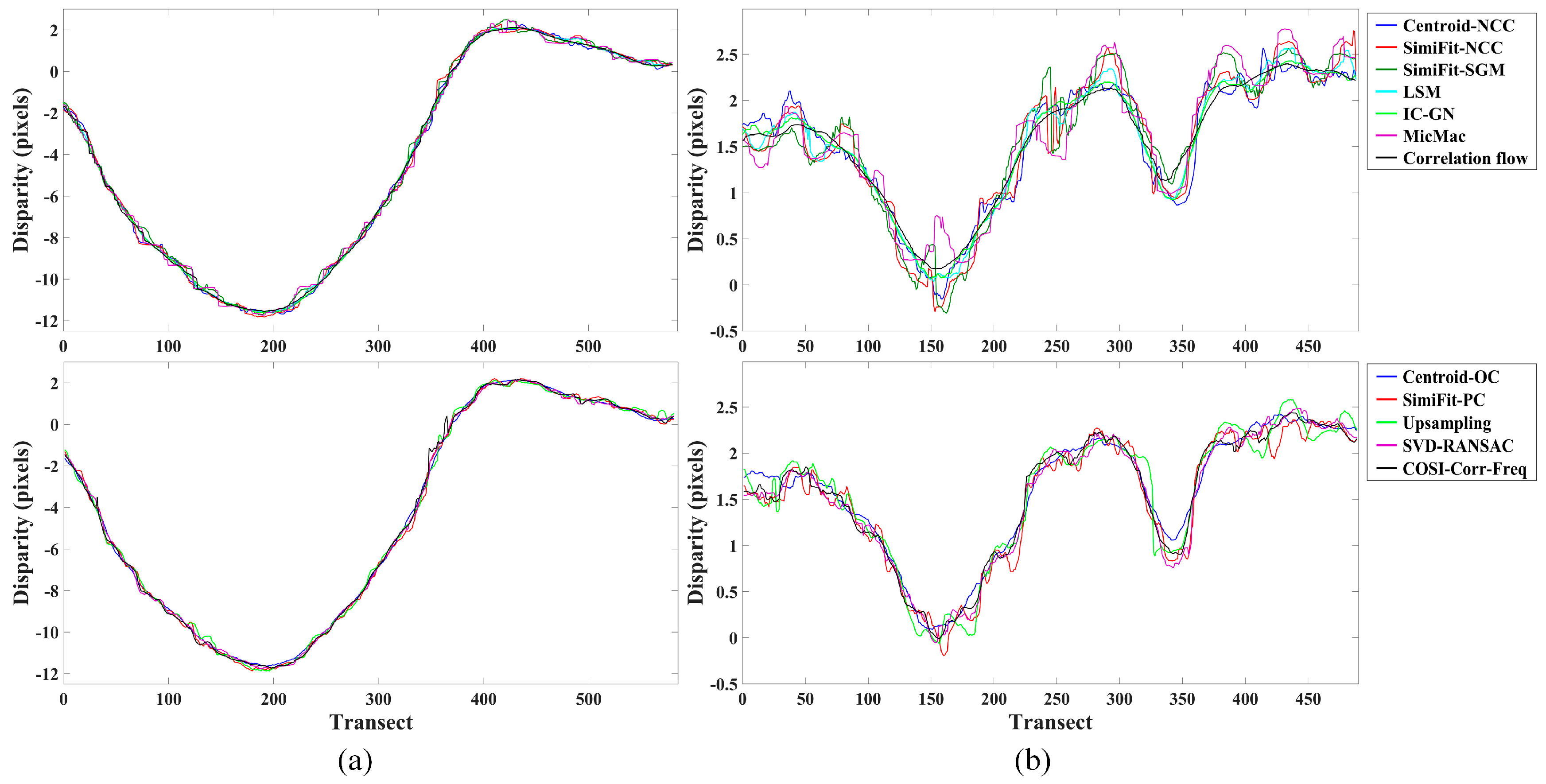
3.2.3. Real Application Two: Disparity Estimation
4. Experimental Results and Discussion
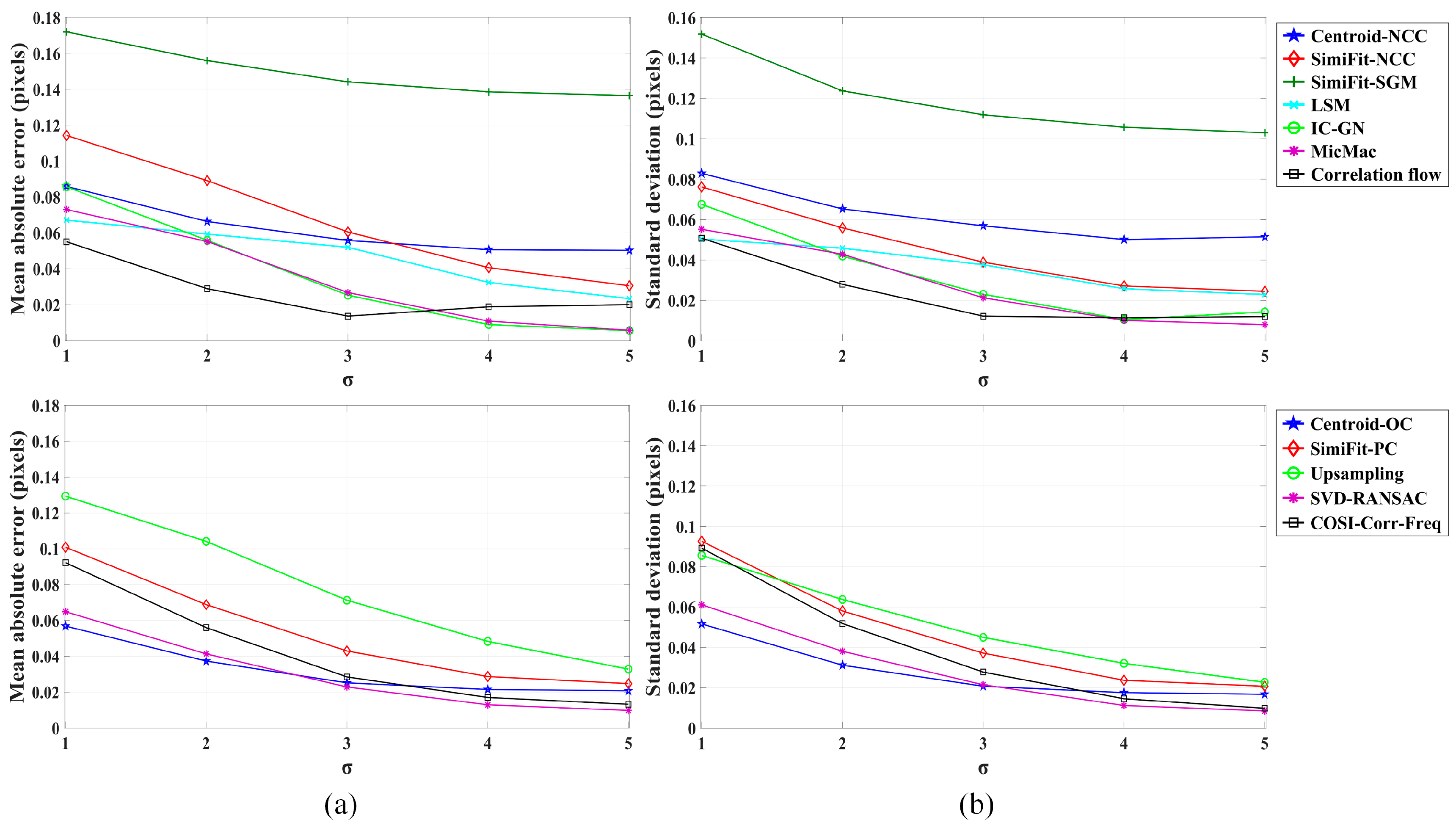
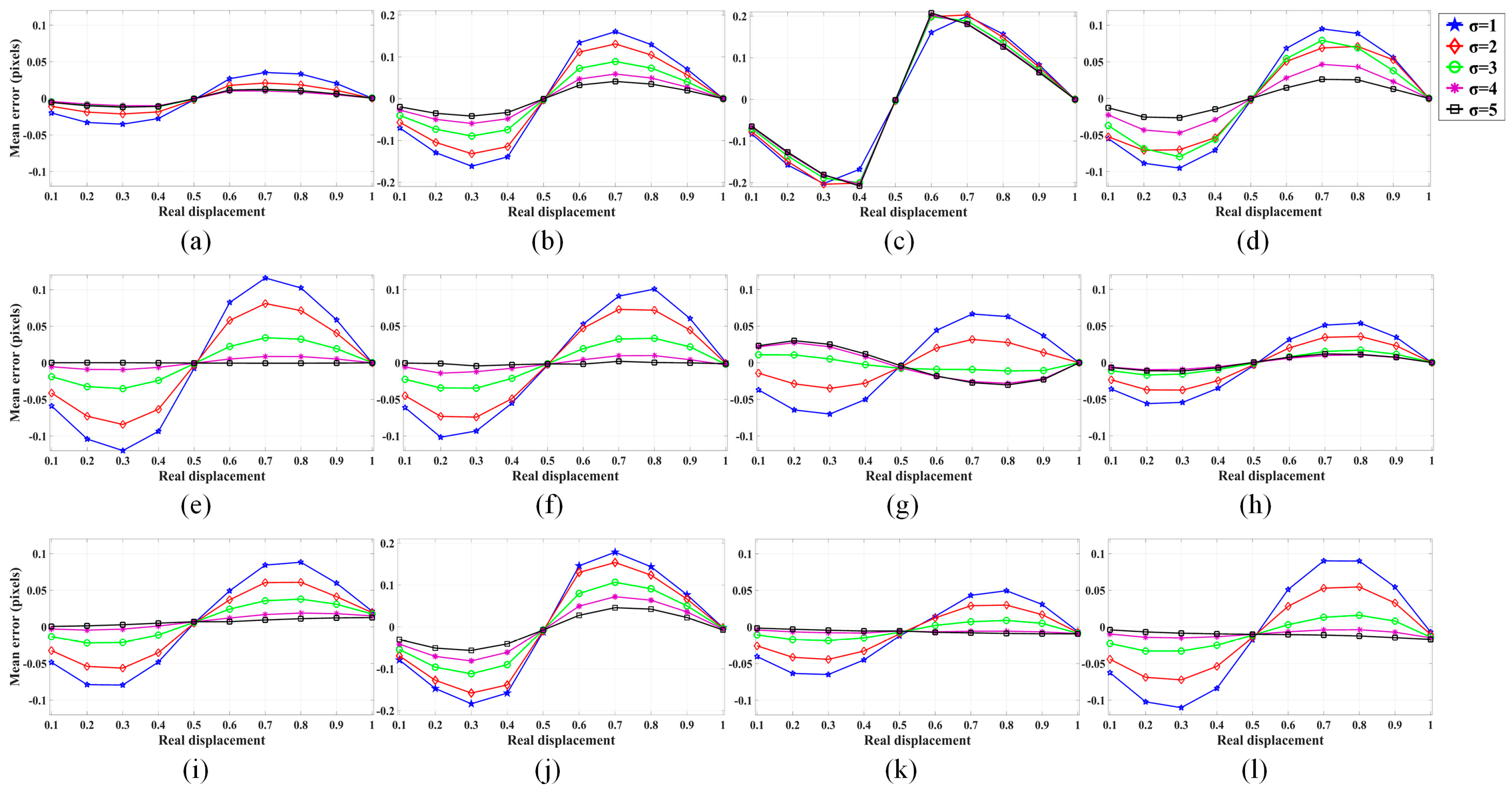
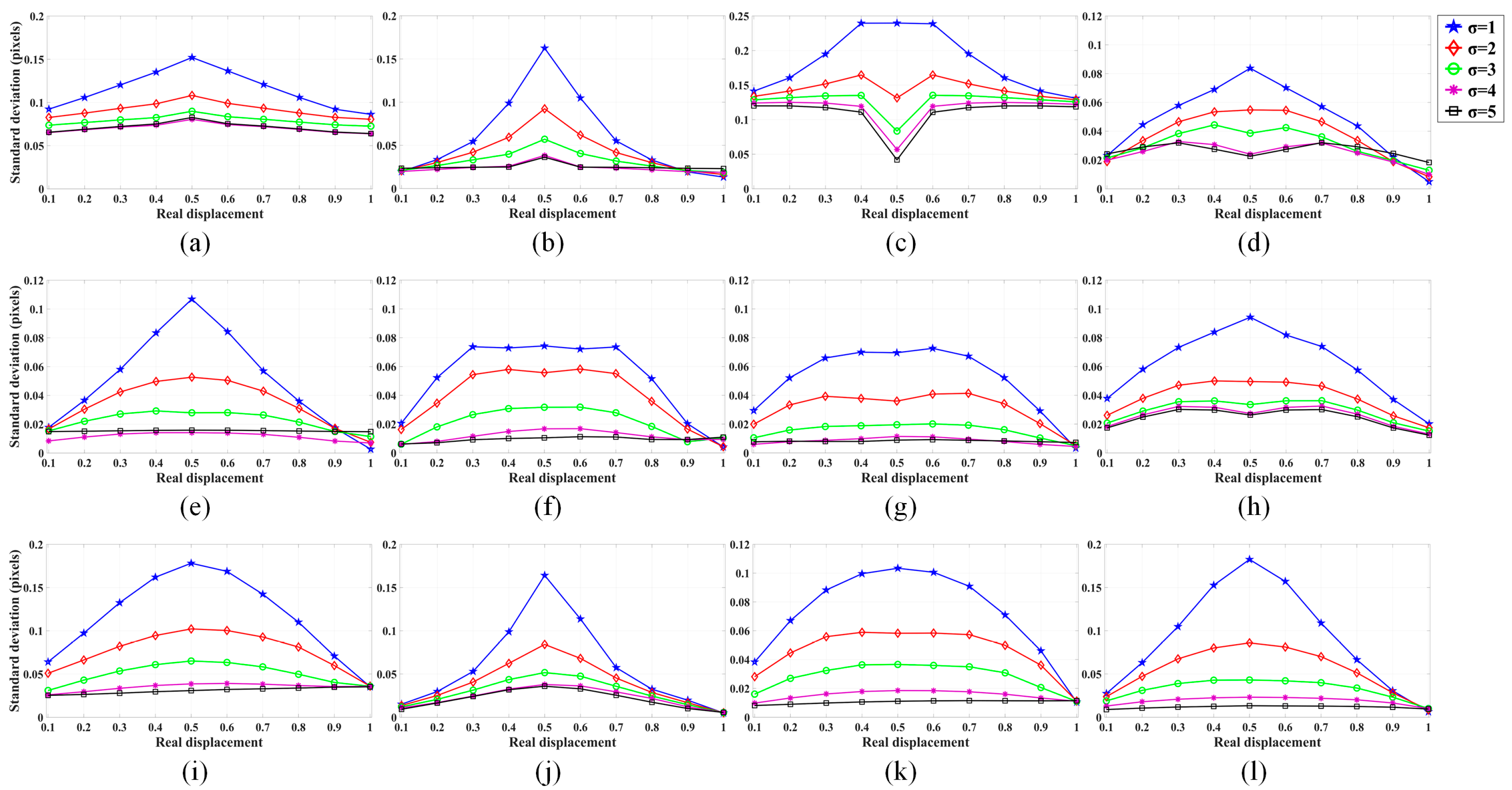
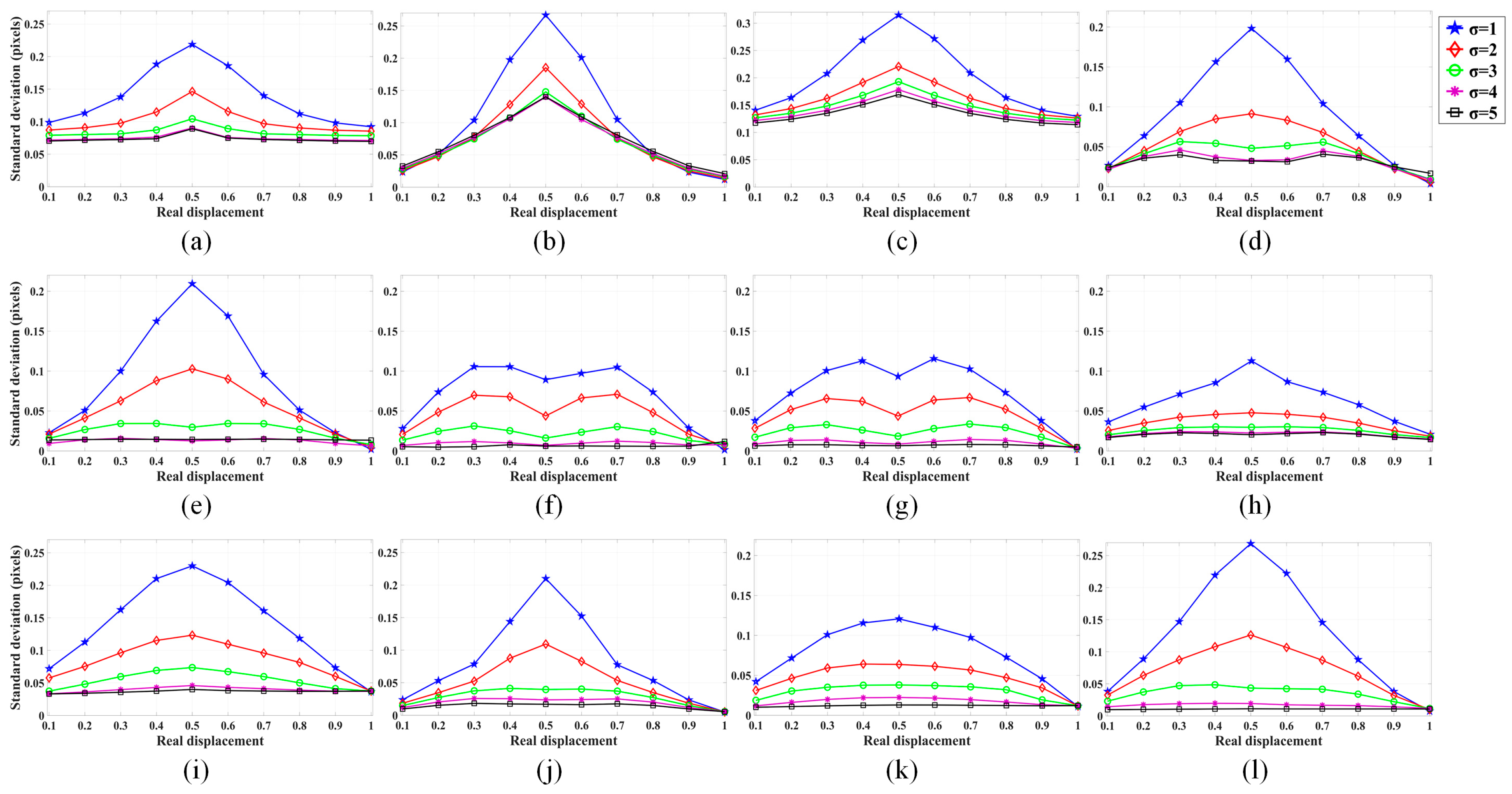
4.1. Results of Simulated Experiment
4.2. Results of Real Application One
4.3. Results of Real Application Two
4.4. Summary and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zitova, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef] [Green Version]
- Scharstein, D.; Szeliski, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Baker, S.; Scharstein, D.; Lewis, J.P.; Roth, S.; Black, M.J.; Szeliski, R. A database and evaluation methodology for optical flow. Int. J. Comput. Vis. 2011, 92, 1–31. [Google Scholar] [CrossRef] [Green Version]
- Sutton, M.A.; Orteu, J.-J.; Schreier, H. Image Correlation for Shape, Motion and Deformation Measurements: Basic Concepts, Theory and Applications; Springer: New York, NJ, USA, 2009. [Google Scholar]
- Xiong, Z.; Zhang, Y. A novel interest-point-matching algorithm for high-resolution satellite images. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4189–4200. [Google Scholar] [CrossRef]
- Haala, N.; Rothermel, M. Dense multi-stereo matching for high quality digital elevation models. Photogramm. Fernerkund. Geoinf. 2012, 2012, 331–343. [Google Scholar] [CrossRef]
- Leprince, S.; Barbot, S.; Ayoub, F.; Avouac, J.-P. Automatic and precise orthorectification, coregistration, and subpixel correlation of satellite images, application to ground deformation measurements. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1529–1558. [Google Scholar] [CrossRef] [Green Version]
- Kääb, A.; Leprince, S. Motion detection using near-simultaneous satellite acquisitions. Remote Sens. Environ. 2014, 154, 164–179. [Google Scholar] [CrossRef] [Green Version]
- Leprince, S.; Musé, P.; Avouac, J.-P. In-Flight CCD distortion calibration for pushbroom satellites based on subpixel correlation. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2675–2683. [Google Scholar] [CrossRef]
- Tong, X.; Ye, Z.; Xu, Y.; Tang, X.; Liu, S.; Li, L.; Xie, H.; Wang, F.; Li, T.; Hong, Z. Framework of jitter detection and compensation for high resolution satellites. Remote Sens. 2014, 6, 3944–3964. [Google Scholar] [CrossRef] [Green Version]
- Jhan, J.-P.; Rau, J.-Y.; Huang, C.-Y. Band-to-band registration and ortho-rectification of multilens/multispectral imagery: A case study of MiniMCA-12 acquired by a fixed-wing UAS. ISPRS J. Photogramm. Remote Sens. 2016, 114, 66–77. [Google Scholar] [CrossRef]
- Gruen, A. Development and status of image matching in photogrammetry. Photogramm. Rec. 2012, 27, 36–57. [Google Scholar] [CrossRef]
- Heid, T.; Kääb, A. Evaluation of existing image matching methods for deriving glacier surface displacements globally from optical satellite imagery. Remote Sens. Environ. 2012, 118, 339–355. [Google Scholar] [CrossRef]
- Gao, S.; Tong, X.; Chen, P.; Ye, Z.; Hu, O.; Wang, B.; Zhao, C.; Liu, S.; Xie, H.; Jin, Y.; et al. Full-Field deformation measurement by videogrammetry using self-adaptive window matching. Photogramm. Rec. 2019, 34, 36–62. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.; Ye, Z.; Li, L.; Liu, S.; Jin, Y.; Chen, P.; Xie, H.; Zhang, S. Detection and estimation of along-track attitude jitter from Ziyuan-3 three-line-array images based on back-projection residuals. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4272–4284. [Google Scholar] [CrossRef]
- Zhang, Z.; Vosselman, G.; Gerke, M.; Persello, C.; Tuia, D.; Yang, M.Y. Detecting building changes between airborne laser scanning and photogrammetric data. Remote Sens. 2019, 11, 2417. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Tong, X.; Xu, Y.; Gao, S.; Liu, S.; Xie, H.; Lu, W.; Liu, X. An improved subpixel phase correlation method with application in videogrammetric monitoring of shaking table tests. Photogramm. Eng. Remote Sens. 2018, 84, 579–592. [Google Scholar] [CrossRef]
- Michel, R.; Rignot, E. Flow of Glaciar Moreno, Argentina, from repeat-pass shuttle imaging radar images: Comparison of the phase correlation method with radar interferometry. J. Glaciol. 1999, 45, 93–100. [Google Scholar] [CrossRef]
- Tian, Q.; Huhns, M.N. Algorithms for subpixel registration. Comput. Vis. Graph. Image Process. 1986, 35, 220–233. [Google Scholar] [CrossRef]
- Guizar-Sicairos, M.; Thurman, S.T.; Fienup, J.R. Efficient subpixel image registration algorithms. Opt. Lett. 2008, 33, 156–158. [Google Scholar] [CrossRef] [Green Version]
- Debella-Gilo, M.; Kääb, A. Sub-Pixel precision image matching for measuring surface displacements on mass movements using normalized cross-correlation. Remote Sens. Environ. 2011, 115, 130–142. [Google Scholar] [CrossRef] [Green Version]
- Pan, B.; Qian, K.; Xie, H.; Asundi, A. Two-Dimensional digital image correlation for in-plane displacement and strain measurement: A review. Meas. Sci. Technol. 2009, 20. [Google Scholar] [CrossRef]
- Fortun, D.; Bouthemy, P.; Kervrann, C. Optical flow modeling and computation: A survey. Comput. Vis. Image Underst. 2015, 134, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.; Ye, Z.; Xu, Y.; Gao, S.; Xie, H.; Du, Q.; Liu, S.; Xu, X.; Liu, S.; Luan, K.; et al. Image registration with Fourier-based image correlation: A comprehensive review of developments and applications. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2019, 12, 4062–4081. [Google Scholar] [CrossRef]
- Hirschmüller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Ackermann, F. Digital image correlation: Performance and potential application in photogrammetry. Photogramm. Rec. 1984, 11, 429–439. [Google Scholar] [CrossRef]
- Rosu, A.-M.; Pierrot-Deseilligny, M.; Delorme, A.; Binet, R.; Klinger, Y. Measurement of ground displacement from optical satellite image correlation using the free open-source software MicMac. ISPRS J. Photogramm. Remote Sens. 2015, 100, 48–59. [Google Scholar] [CrossRef]
- Pan, B.; Wang, B. Digital image correlation with enhanced accuracy and efficiency: A comparison of two subpixel registration algorithms. Exp. Mech. 2016, 56, 1395–1409. [Google Scholar] [CrossRef]
- Alba, A.; Vigueras-Gomez, J.F.; Arce-Santana, E.R.; Aguilar-Ponce, R.M. Phase correlation with sub-pixel accuracy: A comparative study in 1D and 2D. Comput. Vis. Image Underst. 2015, 137, 76–87. [Google Scholar] [CrossRef]
- Le Bivic, R.; Allemand, P.; Quiquerez, A.; Delacourt, C. Potential and limitation of SPOT-5 ortho-image correlation to investigate the cinematics of landslides: The example of “Mare à Poule d’Eau” (Réunion, France). Remote Sens. 2017, 9, 106. [Google Scholar] [CrossRef] [Green Version]
- Bickel, V.T.; Manconi, A.; Amann, F. Quantitative assessment of digital image correlation methods to detect and monitor surface displacements of large slope instabilities. Remote Sens. 2018, 10, 865. [Google Scholar] [CrossRef] [Green Version]
- Sabater, N.; Blanchet, G.; Moisan, L.; Almansa, A.; Morel, J.-M. Review of low-baseline stereo algorithms and benchmarks. In Proceedings of the SPIE Image and Signal Processing for Remote Sensing XVI, Toulouse, France, 20–23 September 2010; p. 783005. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Xu, Y.; Hoegner, L.; Tong, X.; Stilla, U. Precise disparity estimation for narrow baseline stereo based on multiscale superpixels and phase correlation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W13, 147–153. [Google Scholar] [CrossRef] [Green Version]
- Westerweel, J. Fundamentals of digital particle image velocimetry. Meas. Sci. Technol. 1997, 8, 1379–1392. [Google Scholar] [CrossRef] [Green Version]
- Schreier, H.W.; Braasch, J.R.; Sutton, M.A. Systematic errors in digital image correlation caused by intensity interpolation. Opt. Eng. 2000, 39, 2915–2921. [Google Scholar] [CrossRef]
- Van Puymbroeck, N.; Michel, R.; Binet, R.; Avouac, J.-P.; Taboury, J. Measuring earthquakes from optical satellite images. Appl. Opt. 2000, 39, 3486–3494. [Google Scholar] [CrossRef]
- Inglada, J.; Muron, V.; Pichard, D.; Feuvrier, T. Analysis of artifacts in subpixel remote sensing image registration. IEEE Trans. Geosci. Remote Sens. 2007, 45, 254–264. [Google Scholar] [CrossRef]
- Amiot, F.; Bornert, M.; Doumalin, P.; Dupré, J.-C.; Fazzini, M.; Orteu, J.-J.; Poilâne, C.; Robert, L.; Rotinat, R.; Toussaint, E.; et al. Assessment of digital image correlation measurement accuracy in the ultimate error regime: Main results of a collaborative benchmark. Strain 2013, 49, 483–496. [Google Scholar] [CrossRef] [Green Version]
- Uss, M.L.; Vozel, B.; Dushepa, V.A.; Komjak, V.A.; Chehdi, K. A precise lower bound on image subpixel registration accuracy. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3333–3345. [Google Scholar] [CrossRef]
- Messerli, A.; Grinsted, A. Image georectification and feature tracking toolbox: ImGRAFT. Geosci. Instrum. Methods Data Syst. 2015, 4, 23–34. [Google Scholar] [CrossRef] [Green Version]
- Beyer, R.A.; Alexandrov, O.; McMichael, S. The Ames Stereo Pipeline: NASA’s open source software for deriving and processing terrain data. Earth Space Sci. 2018, 5, 537–548. [Google Scholar] [CrossRef]
- Blaber, J.; Adair, B.; Antoniou, A. Ncorr: Open-Source 2D digital image correlation Matlab software. Exp. Mech. 2015, 55, 1105–1122. [Google Scholar] [CrossRef]
- Drulea, M.; Nedevschi, S. Motion estimation using the correlation transform. IEEE Trans. Image Process. 2013, 22, 3260–3270. [Google Scholar] [CrossRef] [PubMed]
- Nagashima, S.; Aoki, T.; Higuchi, T.; Kobayashi, K. A subpixel image matching technique using phase-only correlation. In Proceedings of the International Symposium on Intelligent Signal Processing and Communication Systems, Tottori, Japan, 12–15 December 2006; pp. 701–704. [Google Scholar]
- Tong, X.; Ye, Z.; Xu, Y.; Liu, S.; Li, L.; Xie, H.; Li, T. A novel subpixel phase correlation method using singular value decomposition and unified random sample consensus. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4143–4156. [Google Scholar] [CrossRef]
- Henriksen, M.R.; Manheim, M.R.; Burns, K.N.; Seymour, P.; Speyerer, E.J.; Deran, A.; Boyd, A.K.; Howington-Kraus, E.; Rosiek, M.R.; Archinal, B.A.; et al. Extracting accurate and precise topography from LROC narrow angle camera stereo observations. Icarus 2017, 283, 122–137. [Google Scholar] [CrossRef]
- Liu, C.; Yuen, J.; Torralba, A. SIFT flow: Dense correspondence across scenes and its applications. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 978–994. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuan, W.; Yuan, X.; Xu, S.; Gong, J.; Shibasaki, R. Dense image-matching via optical flow field estimation and fast-guided filter refinement. Remote Sens. 2019, 11, 2410. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Lewis, J.P. Fast template matching. In Proceedings of the Vision Interface, Quebec City, QC, Canada, 15–19 May 1995; pp. 120–123. [Google Scholar]
- Tong, X.; Zheng, S.; Gao, S.; Liu, S.; Chen, P.; Guo, C.; Liu, S.; Xie, H.; Jin, Y.; Ye, Z.; et al. Acceleration of object tracking in high-speed videogrammetry using a parallel OpenMP and SIMD strategy. Photogramm. Rec. 2019, 34, 174–197. [Google Scholar] [CrossRef]
- Kuglin, C. The phase correlation image alignment method. In Proceedings of the International Conference on Cybernetics and Society, San Francisco, CA, USA, 23–25 September 1975; pp. 163–165. [Google Scholar]
- Ye, Z.; Tong, X.; Zheng, S.; Guo, C.; Gao, S.; Liu, S.; Xu, X.; Jin, Y.; Xie, H.; Liu, S.; et al. Illumination-Robust subpixel Fourier-based image correlation methods based on phase congruency. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1995–2008. [Google Scholar] [CrossRef]
- Brown, L.G. A survey of image registration techniques. ACM Comput. Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Foroosh, H.; Zerubia, J.B.; Berthod, M. Extension of phase correlation to subpixel registration. IEEE Trans. Image Process. 2002, 11, 188–200. [Google Scholar] [CrossRef] [Green Version]
- Takita, K.; Aoki, T.; Sasaki, Y.; Higuchi, T.; Kobayashi, K. High-Accuracy subpixel image registration based on phase-only correlation. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2003, 86, 1925–1934. [Google Scholar]
- Young, S.S.; Driggers, R.G. Superresolution image reconstruction from a sequence of aliased imagery. Appl. Opt. 2006, 45, 5073–5085. [Google Scholar] [CrossRef] [PubMed]
- Nobach, H.; Damaschke, N.; Tropea, C. High-Precision sub-pixel interpolation in particle image velocimetry image processing. Exp. Fluids 2005, 39, 299–304. [Google Scholar] [CrossRef]
- Baker, S.; Matthews, I. Lucas-Kanade 20 years on: A unifying framework. Int. J. Comput. Vis. 2004, 56, 221–255. [Google Scholar] [CrossRef]
- Gruen, A. Adaptive least squares correlation: A powerful image matching technique. S. Afr. J. Photogramm. Remote Sens. Cartogr. 1985, 14, 175–187. [Google Scholar]
- Pan, B.; Li, K.; Tong, W. Fast, robust and accurate digital image correlation calculation without redundant computations. Exp. Mech. 2013, 53, 1277–1289. [Google Scholar] [CrossRef]
- Hoge, W.S. A subspace identification extension to the phase correlation method [MRI application]. IEEE Trans. Med. Imaging 2003, 22, 277–280. [Google Scholar] [CrossRef]
- Facciolo, G.; De Franchis, C.; Meinhardt, E. MGM: A significantly more global matching for stereovision. In Proceedings of the British Machine Vision Conference, Swansea, UK, 7–10 September 2015. [Google Scholar]
- Pan, B. Reliability-Guided digital image correlation for image deformation measurement. Appl. Opt. 2009, 48, 1535–1542. [Google Scholar] [CrossRef]
- Rupnik, E.; Daakir, M.; Pierrot Deseilligny, M. MicMac—A free, open-source solution for photogrammetry. Open Geospat. Data Softw. Stand. 2017, 2, 14. [Google Scholar] [CrossRef]
- Fitch, A.; Kadyrov, A.; Christmas, W.J.; Kittler, J. Orientation correlation. In Proceedings of the British Machine Vision Conference, Cardiff, UK, 2–5 September 2002; pp. 133–142. [Google Scholar]
- Stone, H.S.; Orchard, M.T.; Chang, E.-C.; Martucci, S.A. A fast direct Fourier-based algorithm for subpixel registration of images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2235–2243. [Google Scholar] [CrossRef] [Green Version]
- Ye, Z.; Xu, Y.; Tong, X.; Zheng, S.; Zhang, H.; Xie, H.; Stilla, U. Estimation and analysis of along-track attitude jitter of ZiYuan-3 satellite based on relative residuals of tri-band multispectral imagery. ISPRS J. Photogramm. Remote Sens. 2019, 158, 188–200. [Google Scholar] [CrossRef]
- Tong, X.; Xu, Y.; Ye, Z.; Liu, S.; Tang, X.; Li, L.; Xie, H.; Xie, J. Attitude oscillation detection of the ZY-3 satellite by using multispectral parallax images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3522–3534. [Google Scholar] [CrossRef]
- Robinson, M.S.; Brylow, S.M.; Tschimmel, M.; Humm, D.; Lawrence, S.J.; Thomas, P.C.; Denevi, B.W.; Bowman-Cisneros, E.; Zerr, J.; Ravine, M.A.; et al. Lunar reconnaissance orbiter camera (LROC) instrument overview. Space Sci. Rev. 2010, 150, 81–124. [Google Scholar] [CrossRef]
- Shimizu, M.; Okutomi, M. Sub-Pixel estimation error cancellation on area-based matching. Int. J. Comput. Vis. 2005, 63, 207–224. [Google Scholar] [CrossRef]
- Scarano, F.; Riethmuller, M.L. Advances in iterative multigrid PIV image processing. Exp. Fluids 2000, 29, S051–S060. [Google Scholar] [CrossRef]
- Bornert, M.; Doumalin, P.; Dupré, J.-C.; Poilane, C.; Robert, L.; Toussaint, E.; Wattrisse, B. Shortcut in DIC error assessment induced by image interpolation used for subpixel shifting. Opt. Lasers Eng. 2017, 91, 124–133. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y.; Sun, C.; Song, Y.; Chen, J. Image pre-filtering for measurement error reduction in digital image correlation. Opt. Lasers Eng. 2015, 65, 46–56. [Google Scholar] [CrossRef]
- Debella-Gilo, M.; Kääb, A. Locally adaptive template sizes for matching repeat images of Earth surface mass movements. ISPRS J. Photogramm. Remote Sens. 2012, 69, 10–28. [Google Scholar] [CrossRef]
- Rothermel, M.; Wenzel, K.; Fritsch, D.; Haala, N. SURE: Photogrammetric surface reconstruction from imagery. In Proceedings of the LC3D Workshop, Berlin, Germany, 4–5 December 2012. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Similarity Measure | Subpixel Method | Patch Size (Pixels) |
|---|---|---|---|
| Centroid-NCC | NCC | Peak centroid | 25 × 25 |
| SimiFit-NCC | NCC | Similarity fitting | 25 × 25 |
| SimiFit-SGM | NCC | Similarity fitting | 7 × 7 |
| LSM | NCC | Local optimization | 25 × 25 |
| IC-GN | ZNSSD | Local optimization | 25 × 25 |
| MicMac | NCC | Intensity interpolation | 7 × 7 |
| Correlation flow | ZNSSD | Global optimization | 7 × 7 |
| Centroid-OC | OC | Peak centroid | 32 × 32 |
| SimiFit-PC | PC | Similarity fitting | 32 × 32 |
| Upsampling | PC | Similarity interpolation | 32 × 32 |
| SVD-RANSAC | PC | Phase-based | 32 × 32 |
| COSI-Corr-Freq | PC | Phase-based | 32 × 32 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, Z.; Xu, Y.; Chen, H.; Zhu, J.; Tong, X.; Stilla, U. Area-Based Dense Image Matching with Subpixel Accuracy for Remote Sensing Applications: Practical Analysis and Comparative Study. Remote Sens. 2020, 12, 696. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12040696
Ye Z, Xu Y, Chen H, Zhu J, Tong X, Stilla U. Area-Based Dense Image Matching with Subpixel Accuracy for Remote Sensing Applications: Practical Analysis and Comparative Study. Remote Sensing. 2020; 12(4):696. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12040696
Chicago/Turabian StyleYe, Zhen, Yusheng Xu, Hao Chen, Jingwei Zhu, Xiaohua Tong, and Uwe Stilla. 2020. "Area-Based Dense Image Matching with Subpixel Accuracy for Remote Sensing Applications: Practical Analysis and Comparative Study" Remote Sensing 12, no. 4: 696. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12040696