Optimized Segmentation Based on the Weighted Aggregation Method for Loess Bank Gully Mapping


 , and
, and 
Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Area and Data
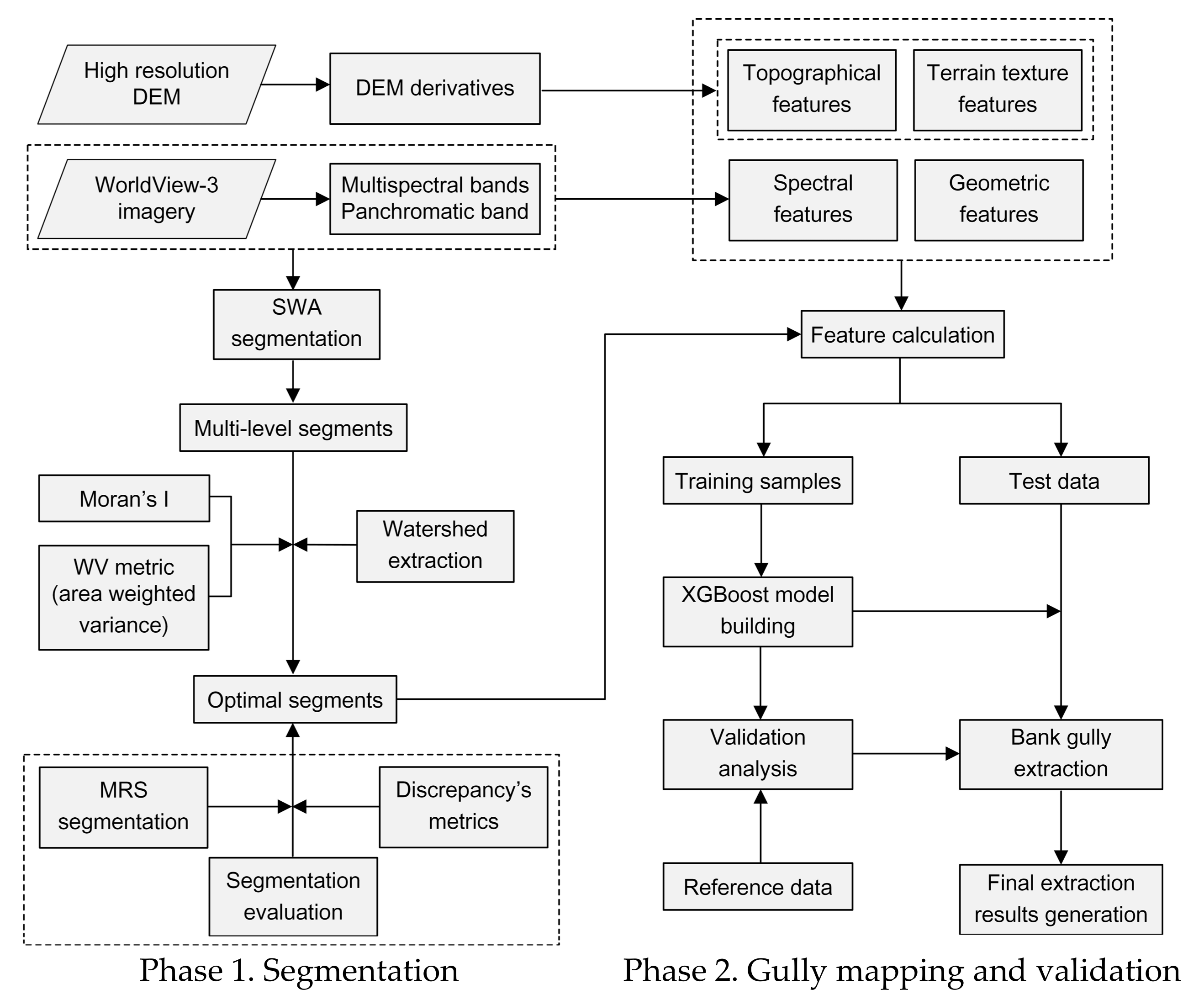
2.2. Methods
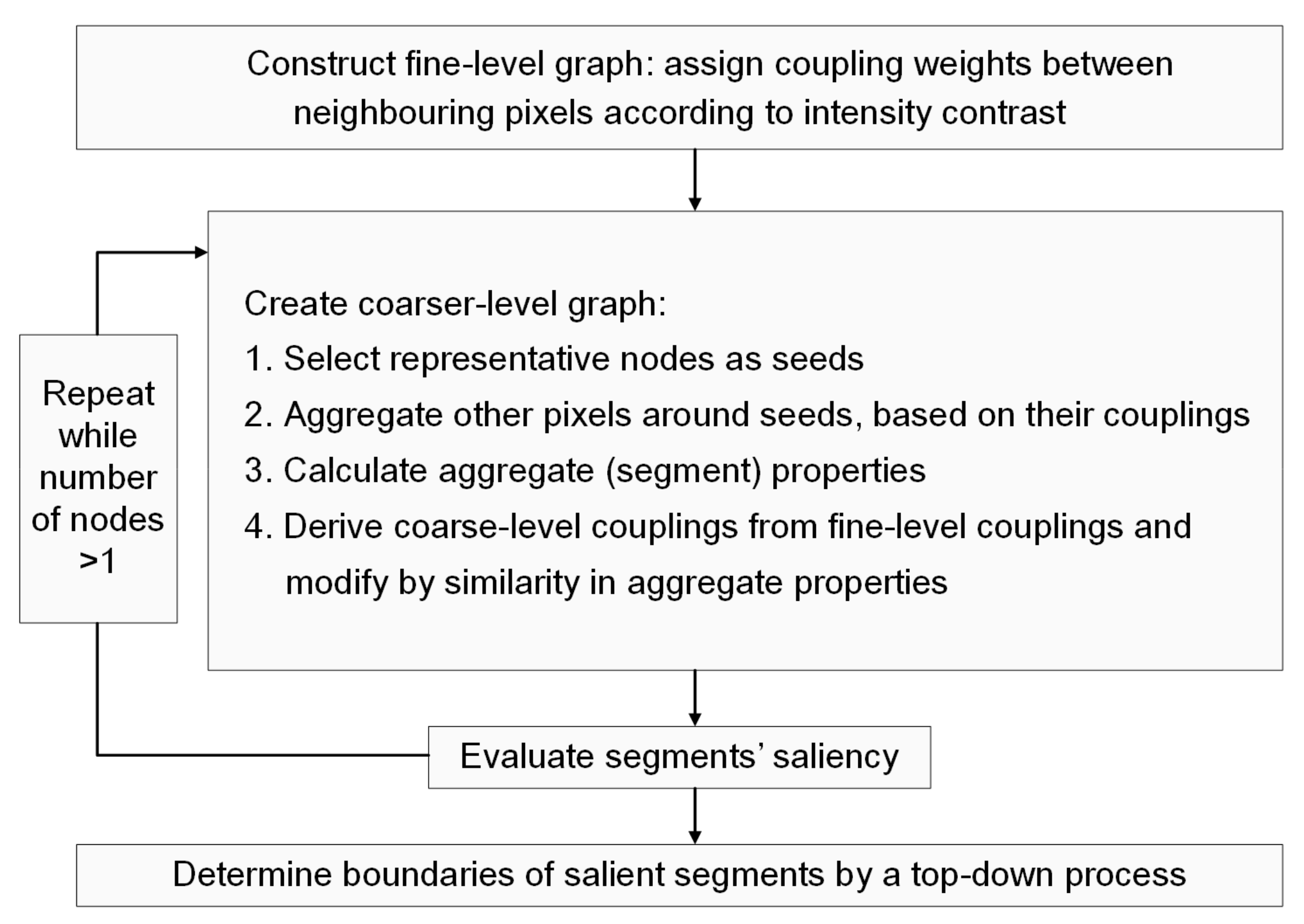
2.2.1. Generating Multi-Level Segments by SWA
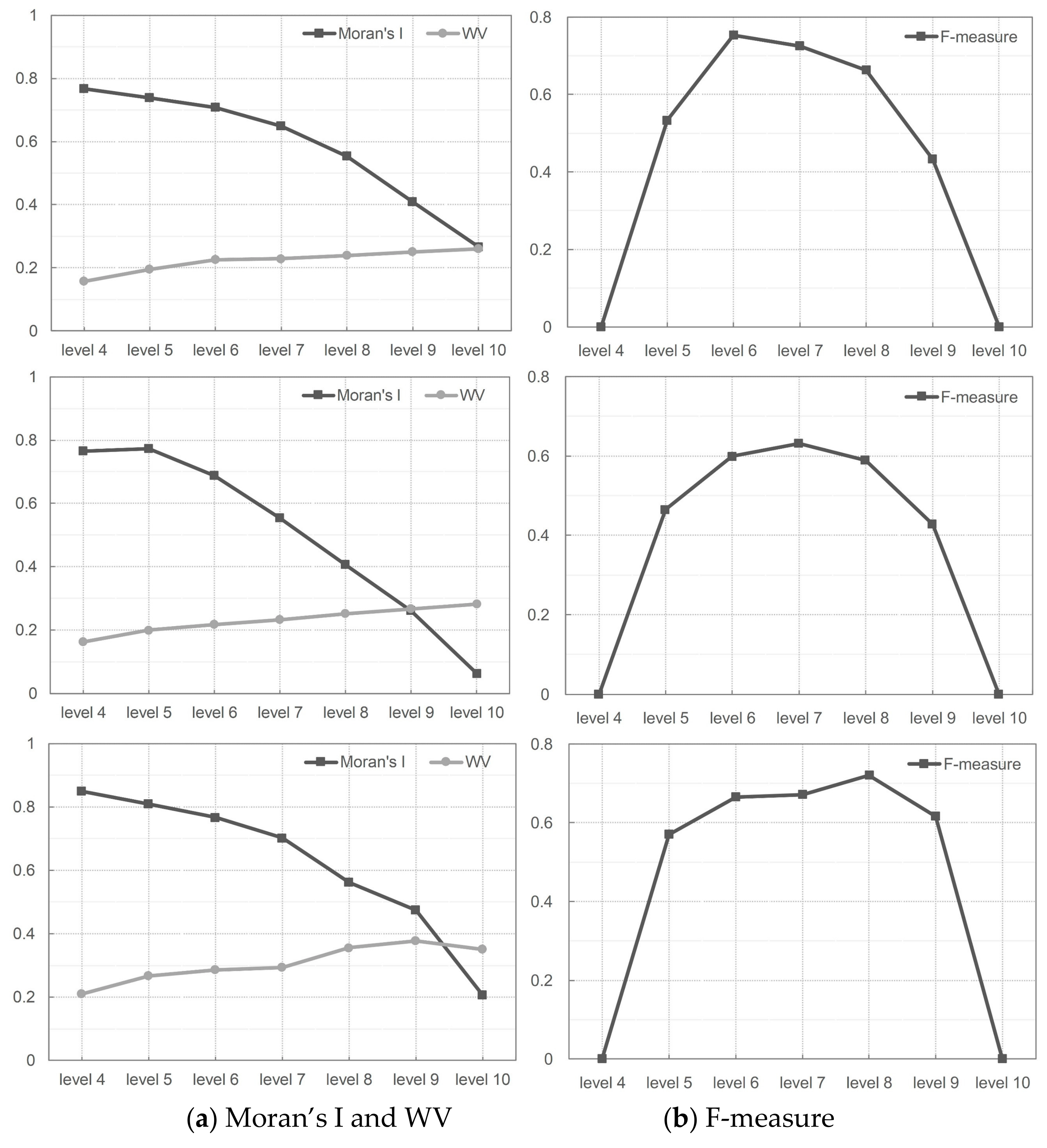
2.2.2. Segmentation Optimization and Evaluation
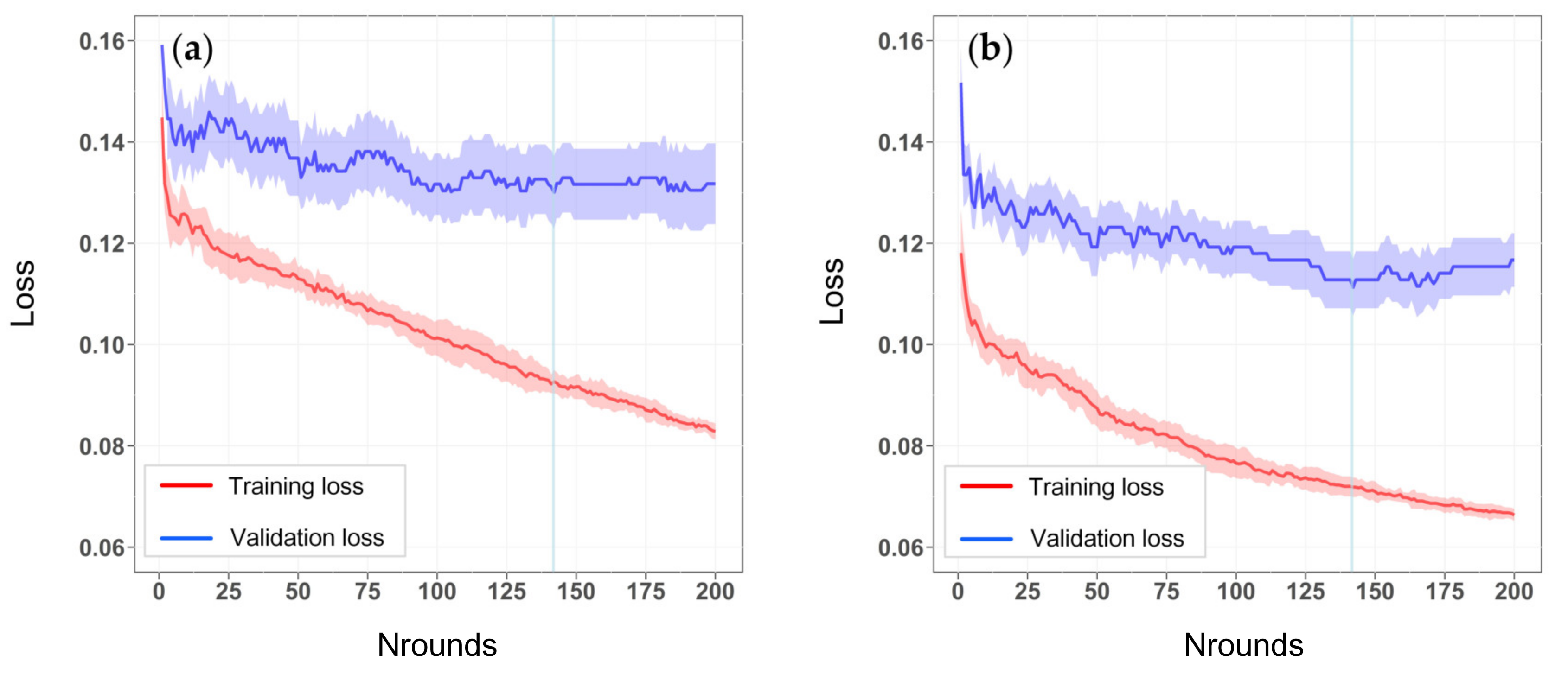
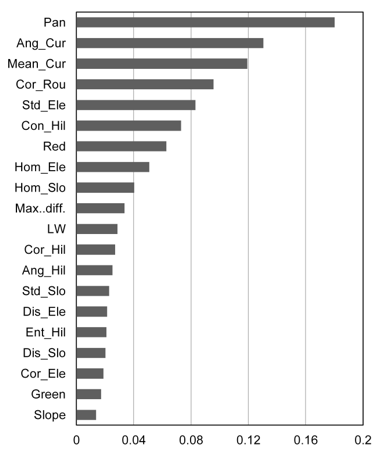
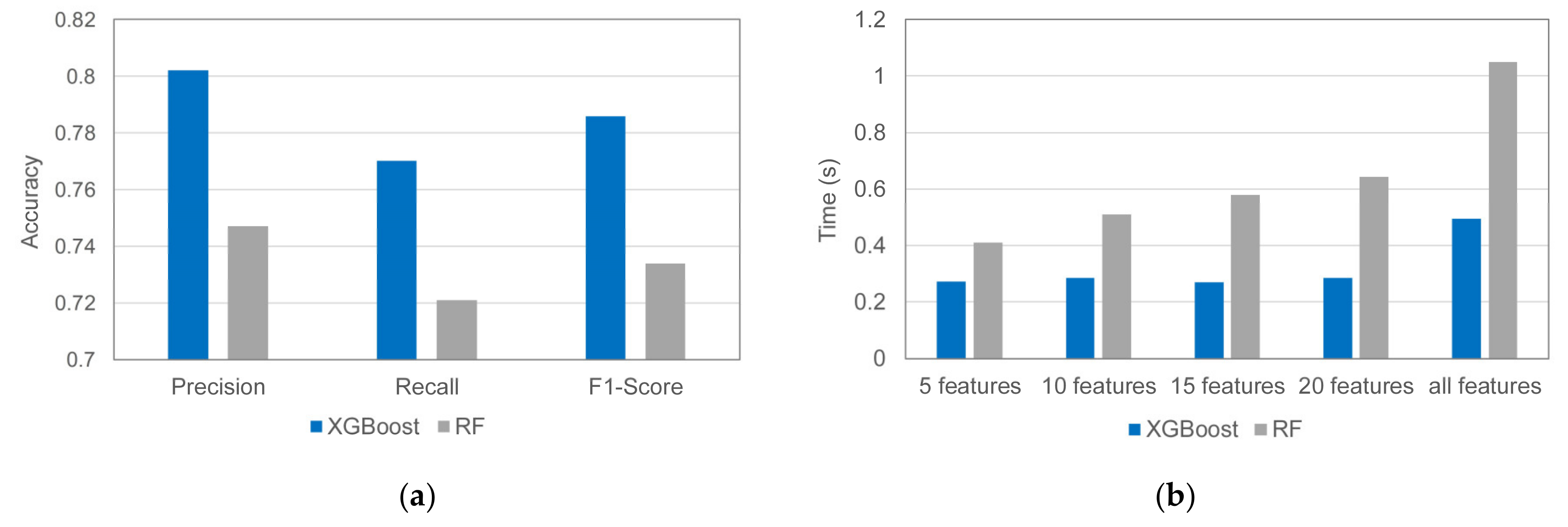
2.2.3. Bank Gully Extraction Using XGBoost
3. Results and Analysis
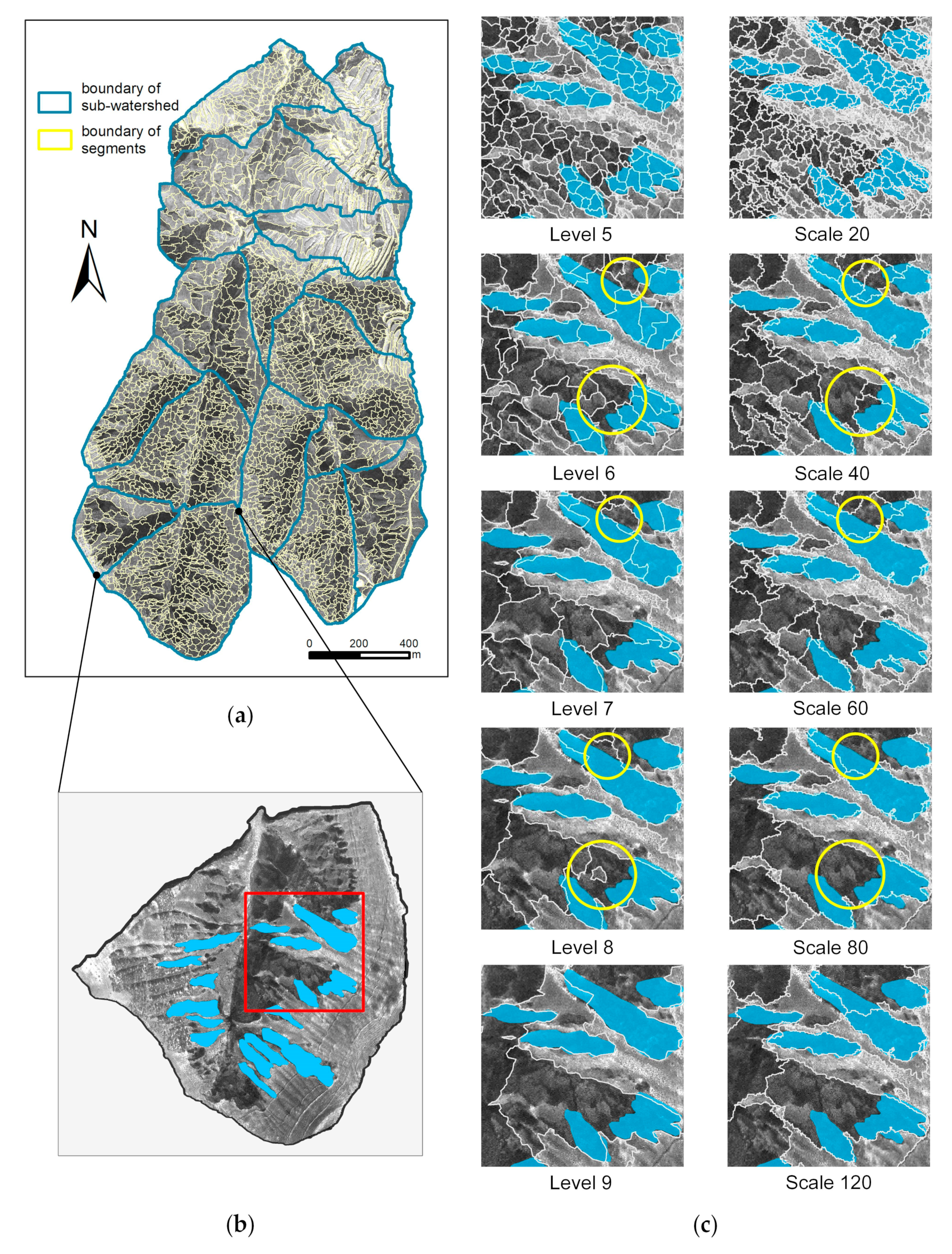
3.1. Segmentation Results
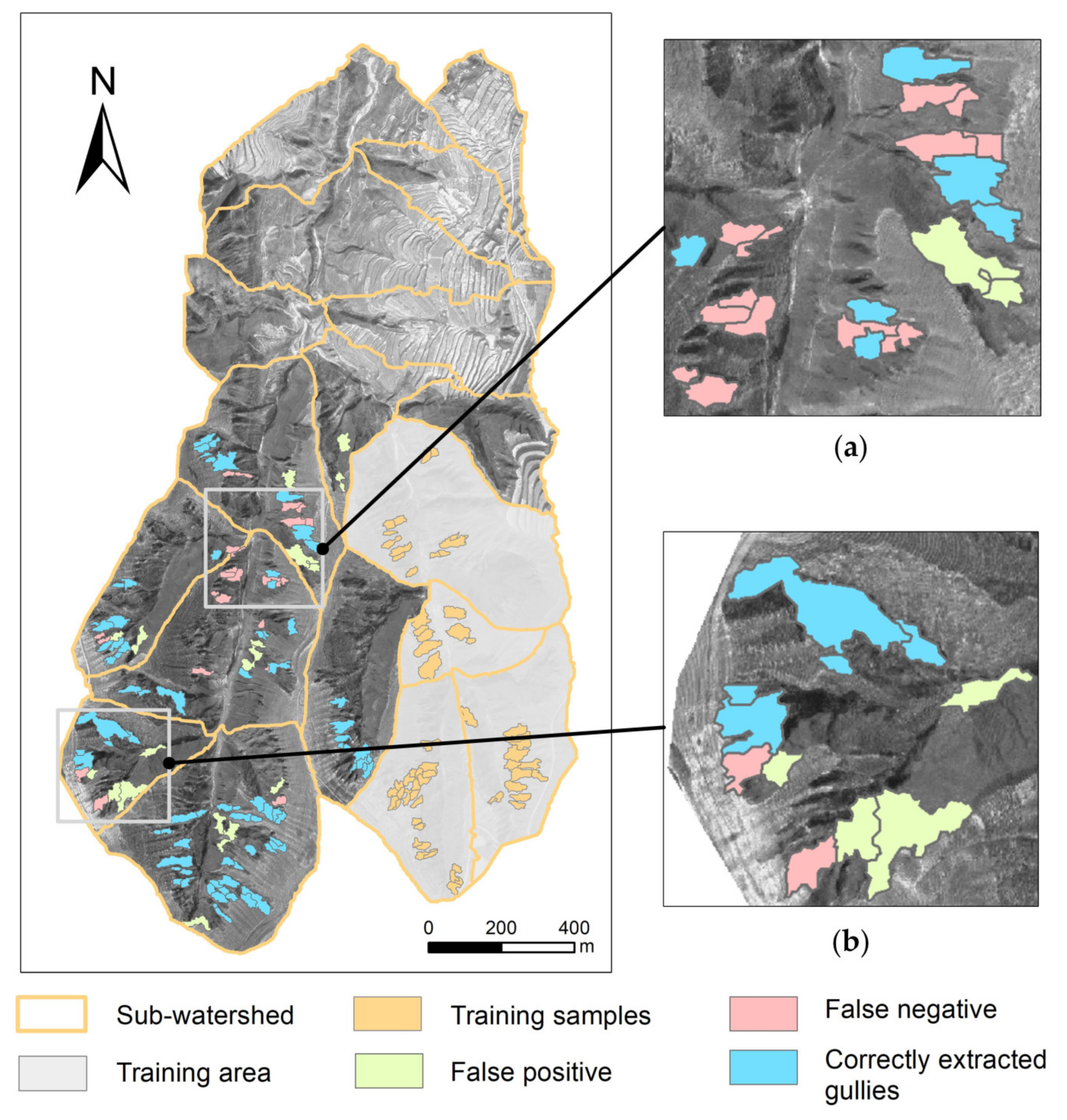
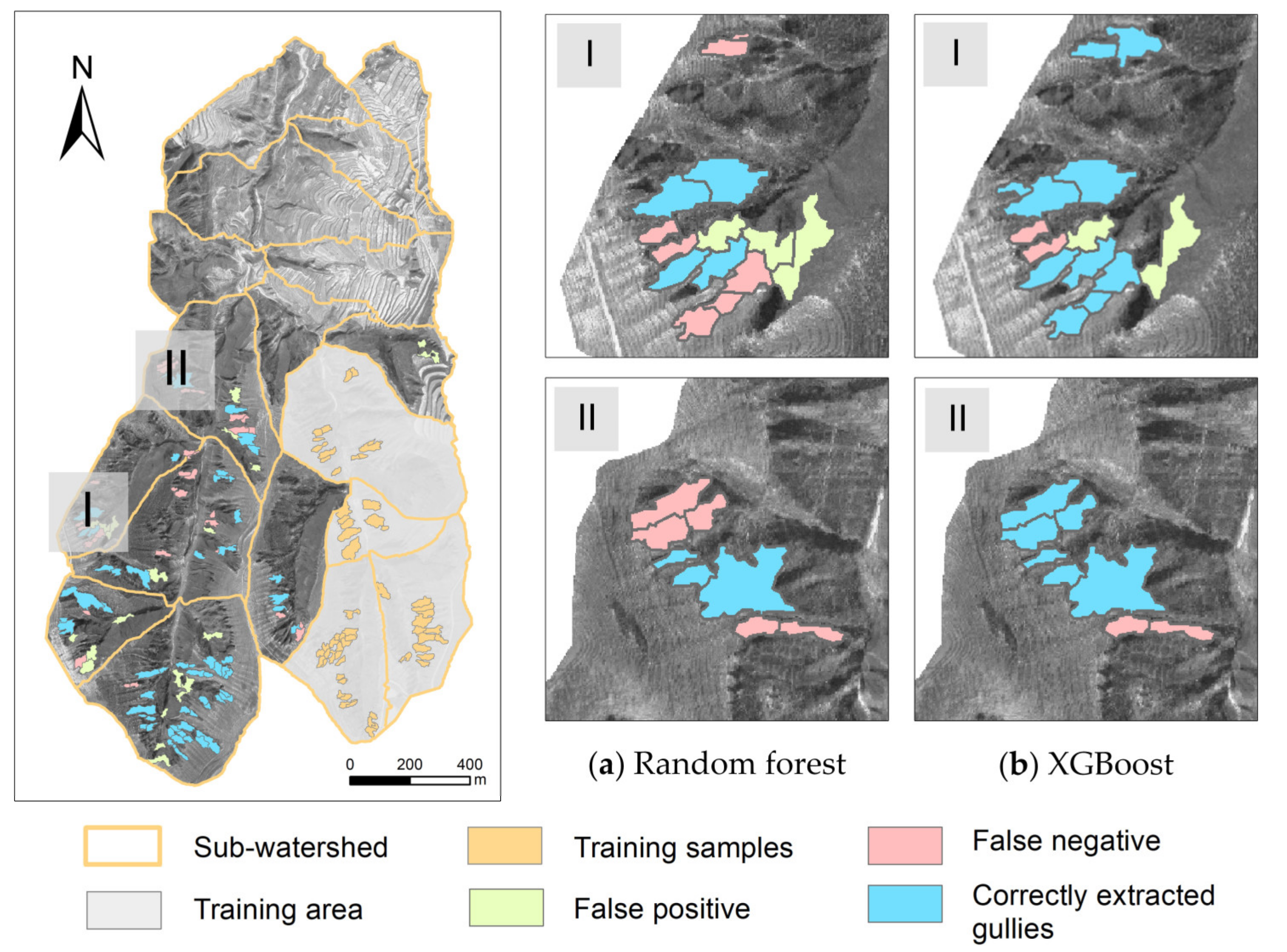
3.2. Bank Gully Extraction Results
4. Discussion
4.1. Comparison With Another Method
4.2. Applications and Limitations of the Proposed Method
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Poesen, J.; Nachtergaele, J.; Verstraeten, G.; Valentin, C. Gully erosion and environmental change: Importance and research needs. Catena 2003, 50, 91–133. [Google Scholar] [CrossRef]
- Upper and Middle Yellow River Bureau. Atlas of Soil and Water Conservation in the Yellow River Basin; Seismological Press: Beijing, China, 2012. [Google Scholar]
- Wu, H.; Xu, X.; Zheng, F.L.; Chao, Q.; Xu, H. Gully Morphological Characteristics in the Loess Hilly-gully Region Based on 3D Laser Scanning Technique. Earth Surf. Process. Landf. 2017, 43, 1701–1710. [Google Scholar] [CrossRef]
- Gao, H.D.; Li, Z.B.; Li, P.; Jia, L.L.; Xu, G.C.; Ren, Z.P.; Pang, G.W.; Zhao, B.H. Capacity of soil loss control in the Loess Plateau based on soil erosion control degree. J. Geogr. Sci. 2016, 26, 457–472. [Google Scholar] [CrossRef] [Green Version]
- Tang, G.A.; Li, F.Y.; Liu, X.J.; Long, Y.; Yang, X. Research on the slope spectrum of the Loess Plateau. Sci. China Ser. E 2008, 51, 175–185. [Google Scholar] [CrossRef]
- Zheng, F.L.; Xu, X.M.; Qin, C. A review of gully erosion process research. Trans. CSAE 2016, 47, 48–59, (In Chinese with English Abstract). [Google Scholar]
- Li, Z.; Zhang, Y.; Zhu, Q.; Yang, S.; Li, H.; Ma, H. A gully erosion assessment model for the Chinese Loess Plateau based on changes in gully length and area. Catena 2017, 148, 195–203. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.A.; Song, C.Q.; Jiang, L.; Zhao, B.Y.; Gao, Y.F.; Ma, R.H. Large-scale mapping of gully-affected areas: An approach integrating google earth images and terrain skeleton information. Geomorphology 2018, 314, 13–26. [Google Scholar] [CrossRef]
- Chen, Y.X.; Jiao, J.Y.; Wei, Y.H.; Zhao, H.K.; Yu, W.J.; Cao, B.T.; Xu, H.Y.; Yan, F.C.; Wu, D.Y.; Li, H. Accuracy Assessment of the Planar Morphology of Valley Bank Gullies Extracted with High Resolution Remote Sensing Imagery on the Loess Plateau, China. Int. J. Env. Res. Pub. Health 2019, 16, 369. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Zhang, Y.; Zhu, Q.; He, Y.; Yao, W. Assessment of bank gully development and vegetation coverage on the Chinese Loess Plateau. Geomorphology 2015, 228, 462–469. [Google Scholar] [CrossRef]
- Wu, Y.; Cheng, H. Monitoring of gully erosion on the Loess Plateau of China using a global positioning system. Catena 2005, 63, 154–166. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V. Object-based gully feature extraction using high spatial resolution imagery. Geomorphology 2011, 134, 260–268. [Google Scholar] [CrossRef]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Hssaine, A.A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analysed by rainfall simulation and UAV remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Shruthi, R.B.V.; Kerle, N.; Jetten, V.; Stein, A. Object-based gully system prediction from medium resolution imagery using Random Forests. Geomorphology 2014, 216, 283–294. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of gully-affected areas by applying Object-Based Image Analysis (OBIA) in the region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef] [Green Version]
- Liu, K.; Ding, H.; Tang, G.A.; Na, J.M.; Huang, X.L.; Xue, Z.G.; Yang, X.; Li, F.Y. Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. ISPRS J. Photogramm. Remote Sens. 2016, 5, 238. [Google Scholar] [CrossRef]
- Liu, K.; Ding, H.; Tang, G.; Zhu, A.X.; Yang, X.; Jiang, S.; Cao, J. An Object-based Approach for Two-level Gully Feature Mapping Using High-resolution DEM and Imagery: A Case Study on Hilly Loess Plateau Region, China. Chin. Geogr. Sci. 2017, 27, 415–430. [Google Scholar] [CrossRef]
- Baatz, M.; Schäpe, A. Multiresolution segmentation. In Angewandte Geographische Informationsverarbeitung XII; Herbert Wichmann Verlag: Heidelberg, Germany, 2000; pp. 12–23. [Google Scholar]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Du, S.H.; Guo, Z.; Wang, W.Y.; Guo, L.; Nie, J. A comparative study of the segmentation of weighted aggregation and multiresolution segmentation. Gisci. Remote. Sens. 2016, 53, 651–670. [Google Scholar] [CrossRef]
- Xiong, Z.Q.; Zhang, X.Y.; Wang, X.N.; Yuan, J. Self-adaptive segmentation of satellite images based on a weighted aggregation approach. Gisci. Remote. Sens. 2018, 1–23. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Cheng, H.D.; Sun, Y. A hierarchical approach to color image segmentation using homogeneity. IEEE T. Image Process. 2000, 9, 2071–2082. [Google Scholar]
- Camilus, K.S.; Govindan, V.K. A Review on Graph Based Segmentation. I. J. Image Graph. Signal Process. 2012, 4. [Google Scholar] [CrossRef] [Green Version]
- Eriksson, A.; Olsson, C.; Kahl, F. Normalized cuts revisited: A reformulation for segmentation with linear grouping constraints. J. Math Imaging Vis. 2011, 39, 45–61. [Google Scholar] [CrossRef] [Green Version]
- Grady, L. Random walks for image segmentation. IEEE T. Pattern Anal. 2006, 1768–1783. [Google Scholar] [CrossRef] [Green Version]
- Zeng, Y.; Samaras, D.; Chen, W.; Peng, Q.S. Topology cuts: A novel min-cut/max-flow algorithm for topology preserving segmentation in N–D images. Comput. Vis. Image Und. 2008, 112, 81–90. [Google Scholar] [CrossRef]
- Sharon, E.; Brandt, A.; Basri, R. Fast multiscale image segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2000), Hilton Head Island, SC, USA, 13–15 June 2000. [Google Scholar]
- Sharon, E.; Brandt, A.; Basri, R. Segmentation and boundary detection using multiscale intensity measurements. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2001), Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Sharon, E.; Galun, M.; Sharon, D.; Basri, R.; Brandt, A. Hierarchy and adaptivity in segmenting visual scenes. Nature 2006, 442, 810. [Google Scholar] [CrossRef]
- Johnson, B.; Xie, Z.X. Unsupervised image segmentation evaluation and refinement using a multi-scale approach. ISPRS J. Photogramm. Remote Sens. 2011, 66, 473–483. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Du, S.H.; Ming, D.P. Segmentation Scale Selection in geographic object-based image analysis. In High Spatial Resolution Remote Sensing: Data, Analysis, and Applications, 1st ed.; CRC Press: Boca Raton, FL, USA, 2018; pp. 201–228. [Google Scholar]
- Zhang, X.Y.; Du, S.H. Learning selfhood scales for urban land cover mapping with very-high-resolution satellite images. Remote Sens. Environ. 2016, 178, 1721–1790. [Google Scholar] [CrossRef]
- Zhang, X.L.; Xiao, P.F.; Feng, X.Z.; Feng, L.; Ye, N. Toward evaluating multiscale segmentations of high spatial resolution remote sensing images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3694–3706. [Google Scholar] [CrossRef]
- Xu, L.; Ming, D.P.; Zhou, W.; Bao, H.Q.; Chen, Y.Y.; Ling, X. Farmland Extraction from High Spatial Resolution Remote Sensing Images Based on Stratified Scale Pre-Estimation. Remote Sens. 2019, 11, 108. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.Y.; Ming, D.P.; Zhao, L.; Lv, B.R.; Zhou, K.Q.; Qing, Y.Z. Review on high spatial resolution remote sensing image segmentation evaluation. Photogramm. Eng. Remote Sens. 2018, 84, 629–646. [Google Scholar] [CrossRef]
- Xiong, L.Y.; Zhu, A.X.; Zhang, L.; Guo, A.T. Drainage basin object-based method for regional-scale landform classification: A case study of loess area in China. Phys. Geogr. 2018, 39, 523–541. [Google Scholar] [CrossRef]
- Jozdani, S.E.; Johnson, B.A.; Chen, D. Comparing Deep Neural Networks, Ensemble Classifiers, and Support Vector Machine Algorithms for Object-Based Urban Land Use/Land Cover Classification. Remote Sens. 2019, 11, 1713. [Google Scholar] [CrossRef] [Green Version]
- Chen, T.; Guestrin, C. XGBoost: Reliable Large-Scale Tree Boosting System. arXiv 2016, 1–6. [Google Scholar]
- Zhou, D.; Zhao, S.; Zhu, C. The Grain for Green Project induced land cover change in the Loess Plateau: A case study with Ansai County, Shanxi Province, China. Ecol. Indic. 2012, 23, 88–94. [Google Scholar] [CrossRef]
- Tarboton, D.G.; Bras, R.L.; Rodriguez-Iturbe, I. On the extraction of channel networks from digital elevation data. Hydro. Process. 1991, 5, 81–100. [Google Scholar] [CrossRef]
- Jenson, S.K.; Domingue, J.O. Extracting topographic structure from digital elevation data for geographic information system analysis. Photogramm. Eng. Remote Sens. 1988, 54, 1593–1600. [Google Scholar]
- Strahler A, N. Quantitative analysis of watershed geomorphology. Transactions American Geophsical Union 1957, 38, 913–920. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.L.; Xiong, L.Y.; Hu, E.L.; Lu, Q.H. An adaptive approach to selecting accumulation threshold for gully networks extraction from DEMs. Geo. GeoInfo. Sci. 2017, 33, 913–920, (In Chinese with English Abstract). [Google Scholar]
- Georganos, S.; Grippa, T.; Lennert, M.; Vanhuysse, S.; Johnson, B.; Wolff, E. Scale matters: Spatially partitioned unsupervised segmentation parameter optimization for large and heterogeneous satellite images. Remote Sens. 2018, 10, 1440. [Google Scholar] [CrossRef] [Green Version]
- Johnson, B.A.; Bragais, M.; Endo, I.; Magcale-Macandog, D.B.; Macandog, P.B.M. Image segmentation parameter optimization considering within- and between-segment heterogeneity at multiple scale levels: Test case for mapping residential areas using landsat imagery. ISPRS Int. GeoInf. 2015, 4, 2292–2305. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Meng, Q.; Qi, Q.; Yang, J.; Liu, Y. Region merging considering within- and between-segment heterogeneity: An improved hybrid remote-sensing image segmentation method. Remote Sens. 2018, 10, 781. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.; Feng, X.; Xiao, P.; He, G.; Zhu, L. Segmentation quality evaluation using region-based precision and recall measures for remote sensing images. ISPRS J. Photogramm. Remote Sens. 2015, 102, 73–84. [Google Scholar] [CrossRef]
- Liu, Y.; Bian, L.; Meng, Y.H.; Wang, H.P.; Zhang, S.F.; Yang, Y.N.; Shao, X.M.; Wang, B. Discrepancy measures for selecting optimal combination of parameter values in object-based image analysis. ISPRS J. Photogramm. Remote Sens. 2012, 68, 144–156. [Google Scholar] [CrossRef]
- Clinton, N.; Holt, A.; Scarborough, J.; Yan, L.; Gong, P. Accuracy assessment measures for object-based image segmentation goodness. Photogramm. Eng. Remote Sens. 2010, 76, 289–299. [Google Scholar] [CrossRef]
- Georganos, S.; Grippa, T.; Vanhuysse, S.; Lennert, M.; Shimoni, M.; Kalogirou, S.; Wolff, E. Less is more: Optimizing classification performance through feature selection in a very-high-resolution remote sensing object-based urban application. Gisci. Remote. Sens. 2017, 55, 221–242. [Google Scholar] [CrossRef]
- Chen, T.; Tong, H. Xgboost: Extreme Gradient Boosting. R Package Version 0.4-2; CRAN R Package: St. Louis, MI, USA, 2015. [Google Scholar]
- Gómez-Gutiérrez, Á.; Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, 291–314. [Google Scholar] [CrossRef]
- Belgiu, M.; Drǎguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Haralick, R.M. Statistical and structural approach to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Bugnicourt, P.; Guitet, S.; Santos, V.F.; Blanc, L.; Sotta, E.; Barbier, N.; Coutern, P.; Na, J.M. Using textural analysis for regional landform and landscape mapping, Eastern Guiana Shield. Geomorphology 2018, 317, 23–44. [Google Scholar] [CrossRef]
- Ding, H.; Na, J.M.; Huang, X.L.; Tang, G.A.; Liu, K. Stability analysis unit and spatial distribution pattern of the terrain texture in the northern Shaanxi Loess Plateau. J. Mt. Sci. 2018, 15, 577–589. [Google Scholar] [CrossRef]
- Mustapha, I.B.; Saeed, F. Bioactive Molecule Prediction Using Extreme Gradient Boosting. Molecules 2016, 21, 1–12. [Google Scholar]
- Yang, X.; Na, J.; Tang, G.; Wang, T.; Zhu, A.X. Bank gully extraction from DEMs utilizing the geomorphologic features of a loess hilly area in China. Front Earth Sci. 2019, 13, 151–168. [Google Scholar] [CrossRef]
- Li, S.J.; Xiong, L.Y.; Tang, G.A.; Strobl, J. Deep learning-based approach for landform classification from integrated data sources of digital elevation model and imagery. Geomorphology 2020, 107045. [Google Scholar] [CrossRef]
- Zhang, W.; Witharana, C.; Liljedahl, A.K.; Kanevskiy, M. Deep Convolutional Neural Networks for Automated Characterization of Arctic Ice-Wedge Polygons in Very High Spatial Resolution Aerial Imagery. Remote Sens. 2018, 10, 1487. [Google Scholar] [CrossRef] [Green Version]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Eltner, A.; Baumgart, P.; Maas, H.G.; Faust, D. Multi-temporal UAV data for automatic measurement of rill and interrill erosion on loess soil. Earth Surf. Process. Lanf. 2015, 40, 741–755. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature Type | Feature Name | Acronym |
|---|---|---|
| Spectral information | Mean band value | Red; Green; Blue; Pan |
| Mean brightness | B | |
| Maximum difference index | MaxDiff | |
| Terrain texture information | Gray Level Co-occurrence Matrix (GLCM) homogeneity | Hom_Ele; Hom_Cur; Hom_Rou; Hom_Slo; Hom_Hil |
| GLCM contrast | Con_Ele; Con_Cur; Con_Rou; Con_Slo; Con_Hil | |
| GLCM dissimilarity | Dis_Ele; Dis_Cur; Dis_Rou; Dis_Slo; Dis_Hil | |
| GLCM entropy | Ent_Ele; Ent_Cur; Ent_Rou; Ent_Slo; Ent_Hil | |
| GLCM angular second moment | Ang_Ele; Ang_Cur; Ang_Rou; Ang _Slo; Ang _Hil | |
| GLCM mean | Mean_Ele; Mean_Cur; Mean_Rou; Mean_Slo; Mean_Hil | |
| GLCM standard deviation | Std_Ele; Std_Cur; Std_Rou; Std_Slo; Std_Hil | |
| GLCM correlation | Cor_Ele; Cor_Cur; Cor_Rou; Cor_Slo; Cor_Hil | |
| Topographic information | Mean Elevation | Elevation |
| Mean Curvature | Curvature | |
| Mean Roughness | Roughness | |
| Mean Slope | Slope | |
| Mean Shaded relief | Hillshade | |
| Geometric information | Shape index | SI |
| Length-width | LW | |
| Roundness | Roundness | |
| Area | Area |
| Optimized Level | Sub-Watersheds |
|---|---|
| Level 6 | Sub-watershed 1, 2, 3, 6, 8, 10, 11, 12, 17 |
| Level 7 | Sub-watershed 4, 5, 9, 14, 15, 16 |
| Level 8 | Sub-watershed 7, 13, 18 |
| Method | Num. of Segments | Level/ Scale | OS | US | ED | NSR | AR | NR | ANI |
|---|---|---|---|---|---|---|---|---|---|
| SWA | 3445 | Opt | 0.078 | 0.106 | 0.093 | 5.576 | 0.078 | 0.627 | 0.138 |
| 1 SWA | 12,000 | Level 5 | 0.079 | 0.066 | 0.073 | 24.981 | 0.079 | 0.910 | 0.145 |
| MRS | 13,712 | 20 | 0.056 | 0.058 | 0.056 | 31.660 | 0.077 | 0.937 | 0.142 |
| 2 SWA | 4770 | Level 6 | 0.078 | 0.083 | 0.081 | 9.830 | 0.079 | 0.796 | 0.143 |
| MRS | 4895 | 40 | 0.103 | 0.130 | 0.118 | 10.962 | 0.103 | 0.818 | 0.184 |
| 3 SWA | 2027 | Level 7 | 0.080 | 0.246 | 0.183 | 3.802 | 0.081 | 0.525 | 0.140 |
| MRS | 1807 | 60 | 0.095 | 0.222 | 0.171 | 4.057 | 0.107 | 0.507 | 0.176 |
| 4 SWA | 966 | Level 8 | 0.100 | 0.352 | 0.259 | 1.726 | 0.098 | 0.462 | 0.161 |
| MRS | 1059 | 80 | 0.117 | 0.562 | 0.406 | 2.340 | 0.115 | 0.539 | 0.190 |
| 5 SWA | 601 | Level 9 | 0.129 | 0.639 | 0.461 | 1.019 | 0.120 | 0.337 | 0.177 |
| MRS | 506 | 120 | 0.198 | 0.798 | 0.581 | 0.943 | 0.181 | 0.321 | 0.231 |
| Parameters | Default Values | Optimized Values |
|---|---|---|
| nrounds | 600 | 141 |
| eta | 0.3 | 0.1 |
| gamma | 0 | 0 |
| max_depth | 6 | 6 |
| min_child_weight | 1 | 2 |
| subsample | 1 | 0.5 |
| column_sample | 1 | 0.5 |
| Prediction | Pr | Re | F1 | |||
|---|---|---|---|---|---|---|
| Gully | Non-Gully | |||||
| Reference | Gully | 77 | 23 | 80.21% | 77.00% | 78.57% |
| Non-gully | 19 | 2555 | ||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, H.; Liu, K.; Chen, X.; Xiong, L.; Tang, G.; Qiu, F.; Strobl, J. Optimized Segmentation Based on the Weighted Aggregation Method for Loess Bank Gully Mapping. Remote Sens. 2020, 12, 793. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12050793
Ding H, Liu K, Chen X, Xiong L, Tang G, Qiu F, Strobl J. Optimized Segmentation Based on the Weighted Aggregation Method for Loess Bank Gully Mapping. Remote Sensing. 2020; 12(5):793. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12050793
Chicago/Turabian StyleDing, Hu, Kai Liu, Xiaozheng Chen, Liyang Xiong, Guoan Tang, Fang Qiu, and Josef Strobl. 2020. "Optimized Segmentation Based on the Weighted Aggregation Method for Loess Bank Gully Mapping" Remote Sensing 12, no. 5: 793. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12050793