Portable and Easily-Deployable Air-Launched GPR Scanner

 , , and
, , and
Abstract
:
1. Introduction
1.1. Background
1.2. Aim and Scope
2. Working Principle of the Portable Setup
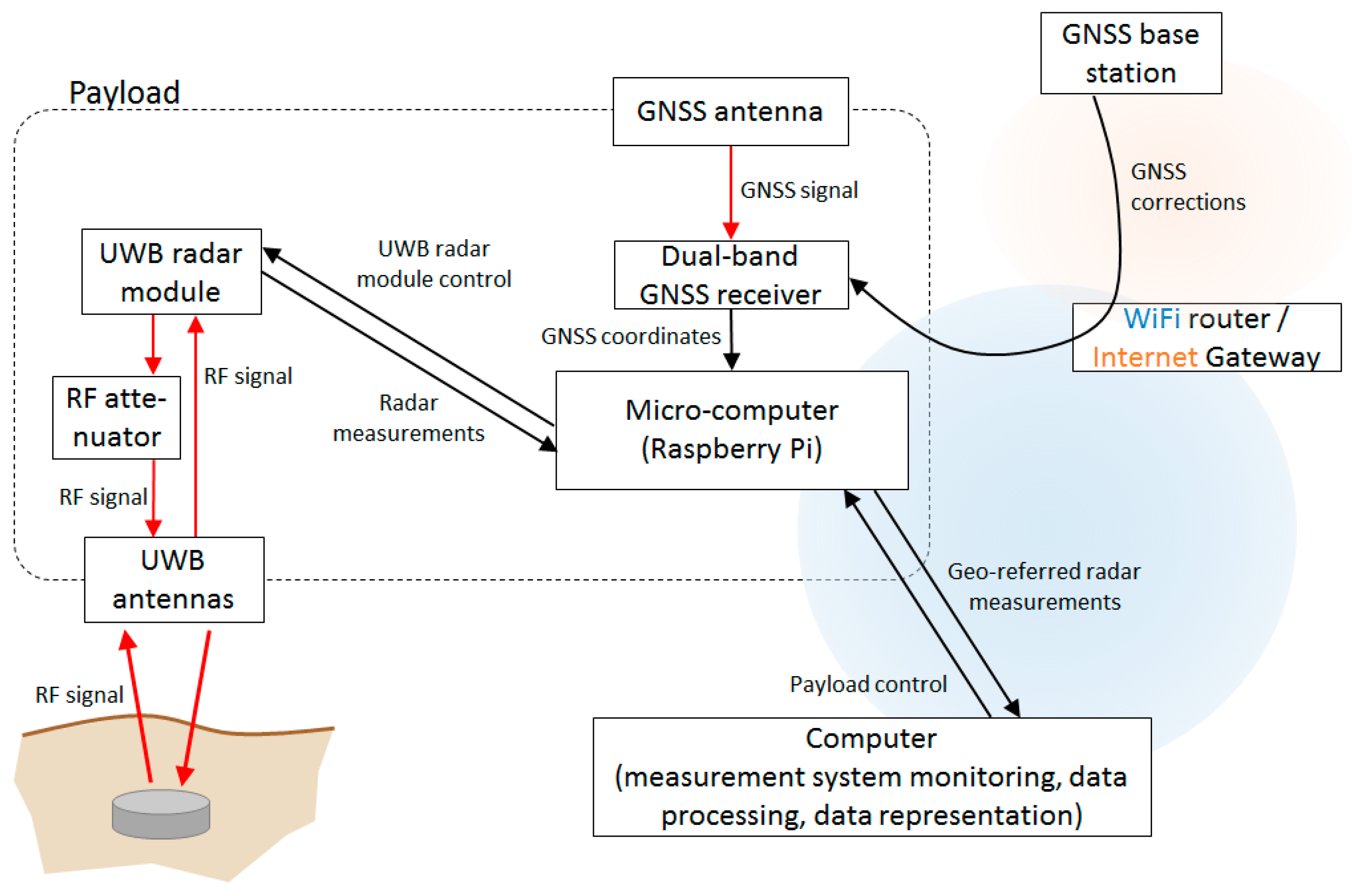
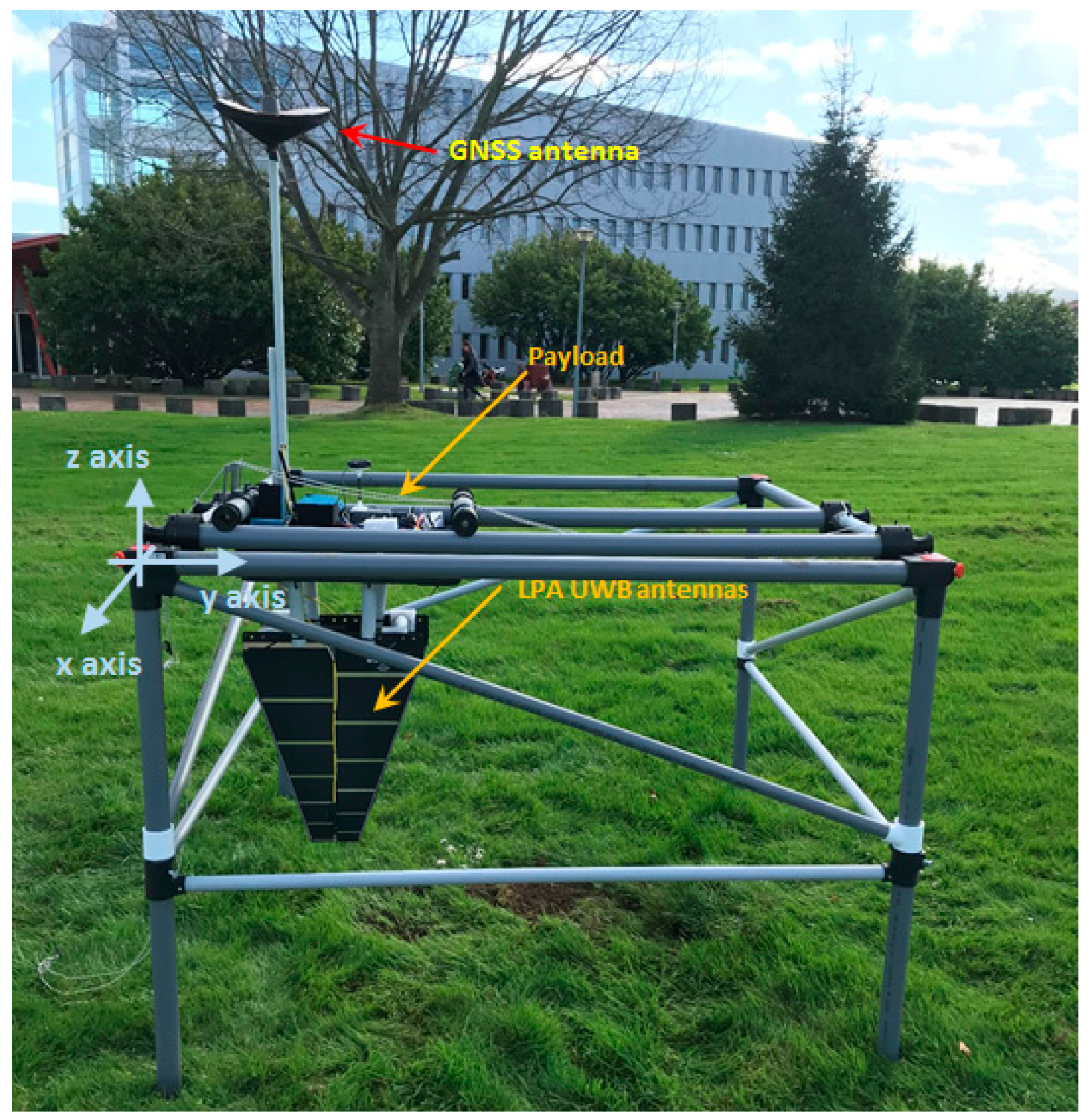
2.1. Hardware Description
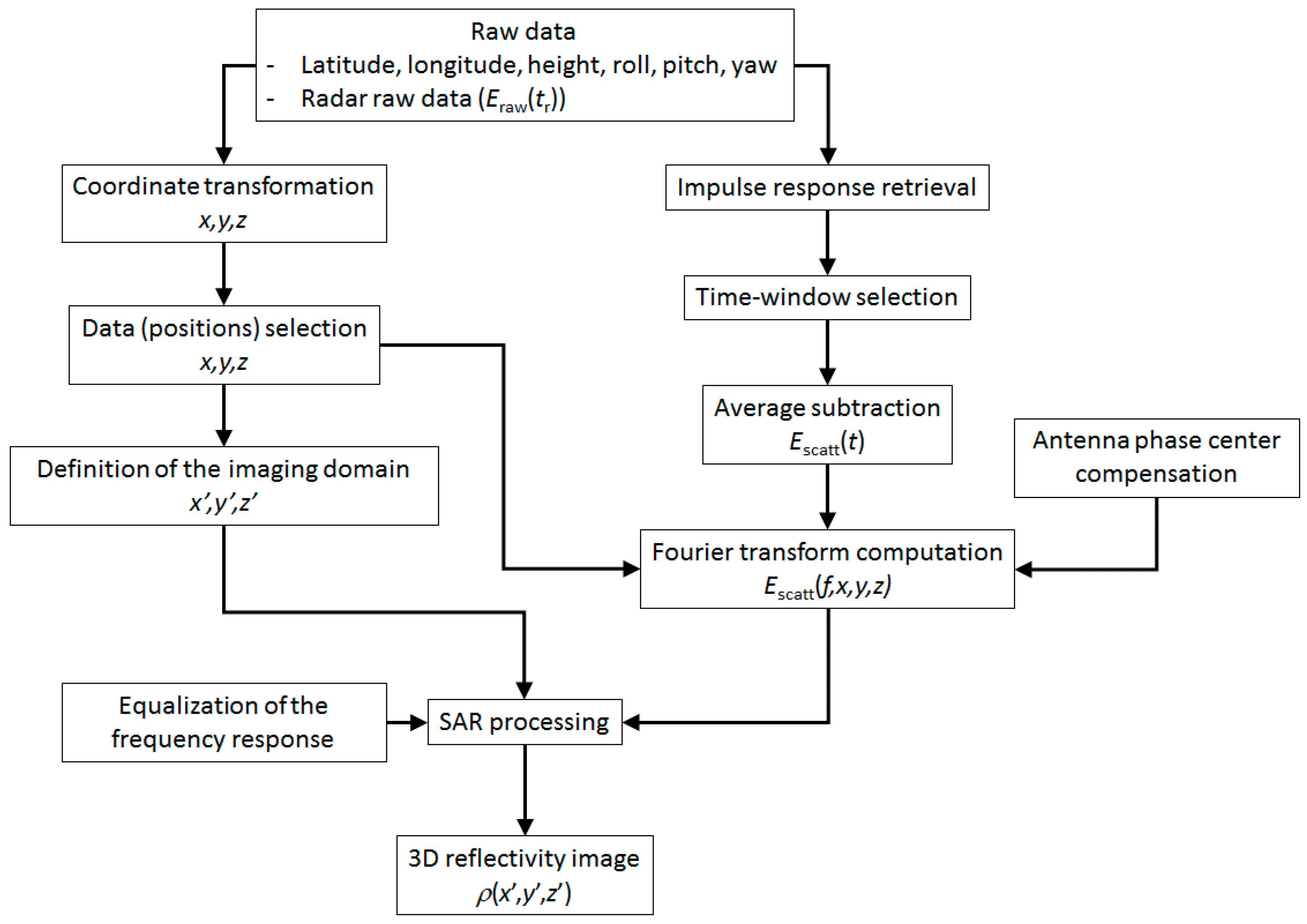
2.2. GPR-SAR Processing
3. Results
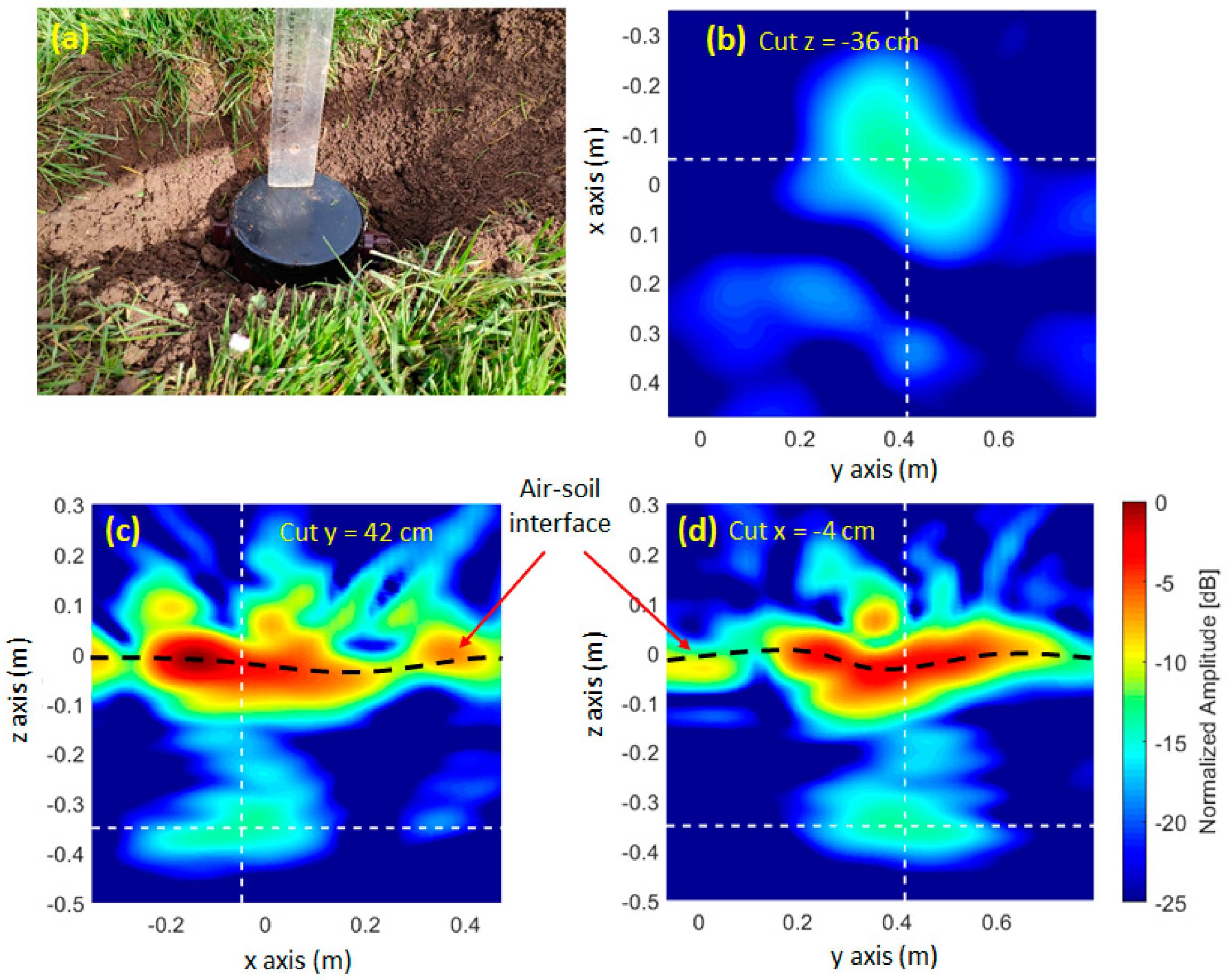
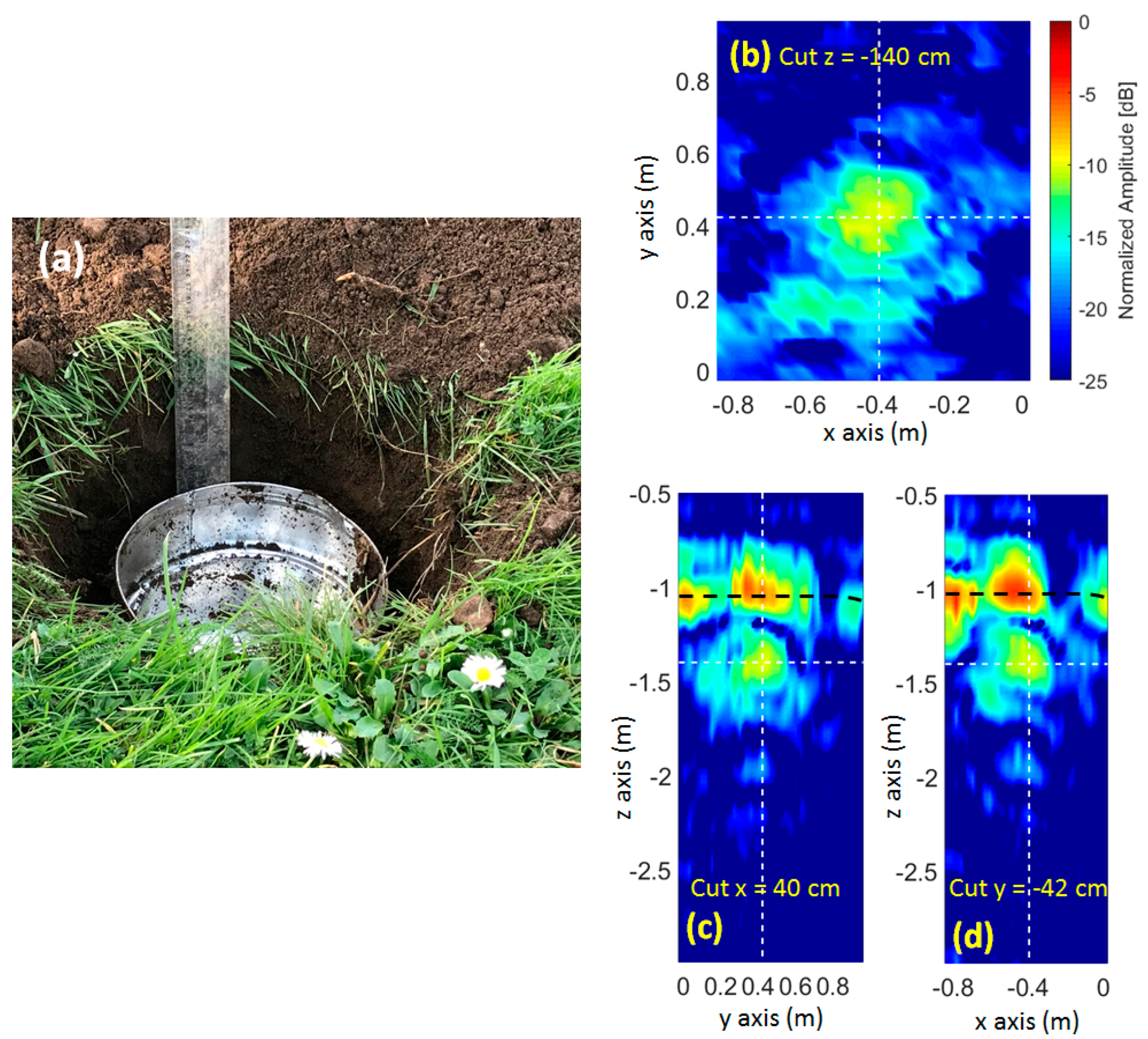
3.1. Detection of Metallic and Plastic Targets Buried in Loamy Soil
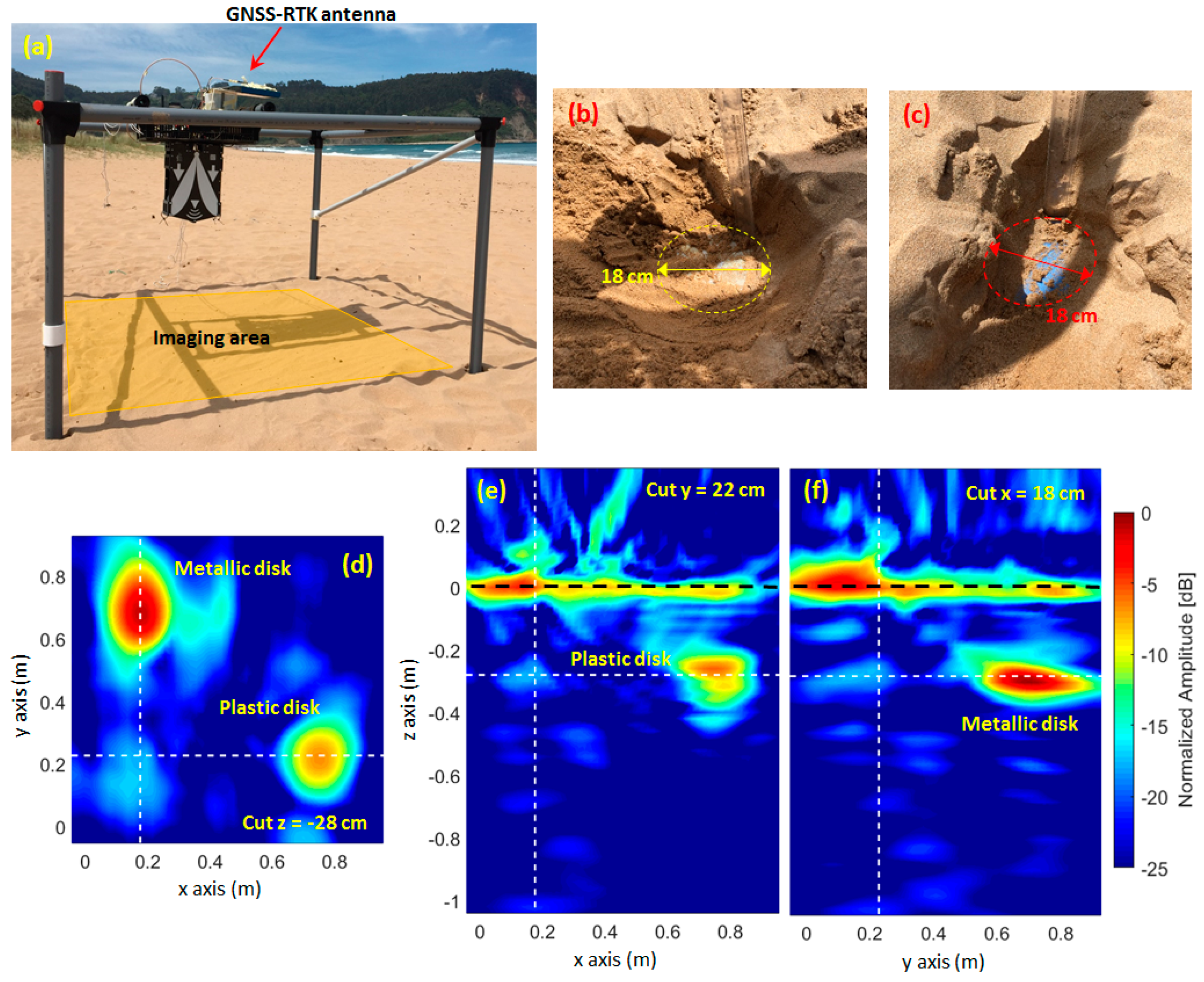
3.2. Test in A Dry Soil
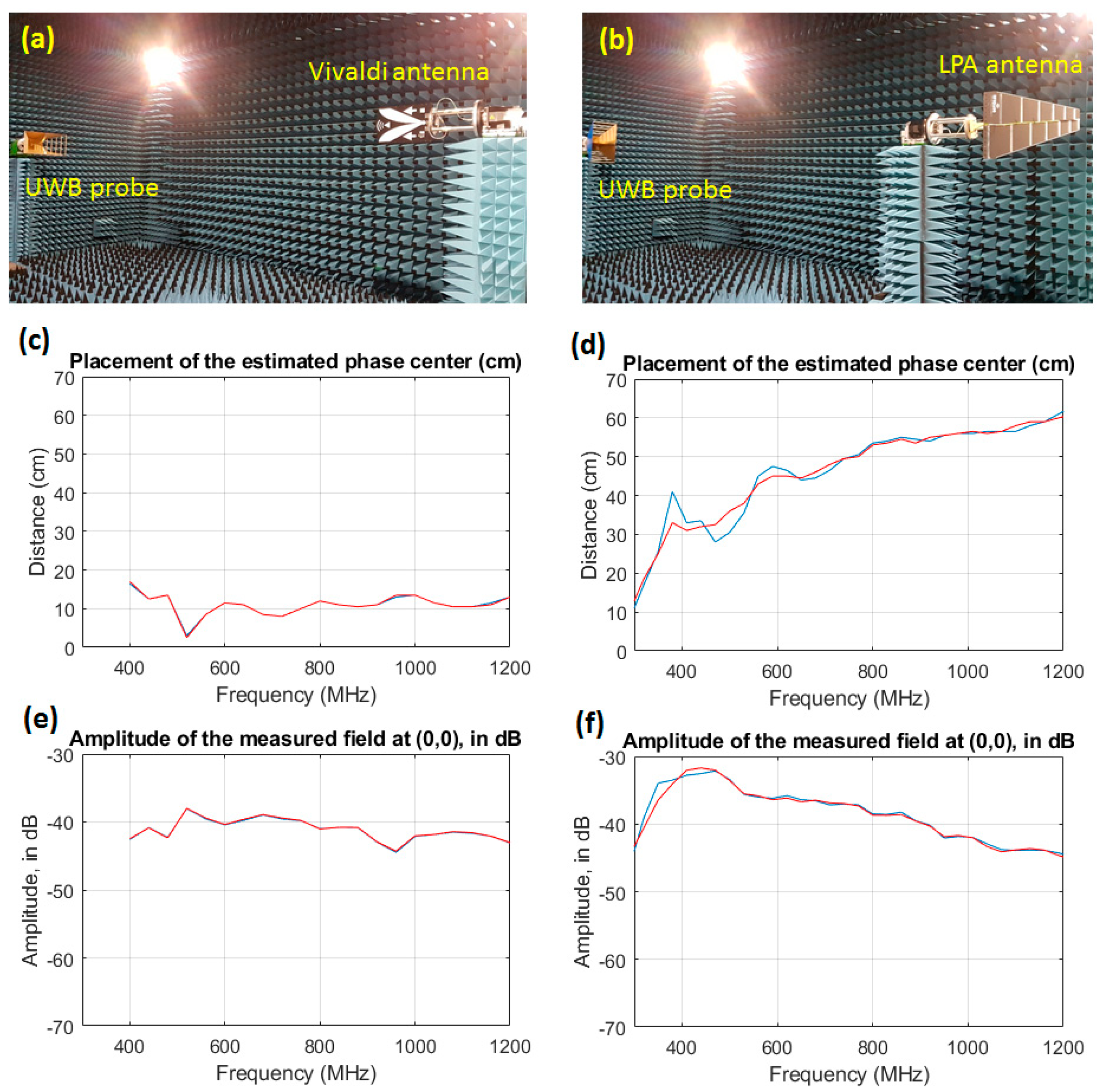
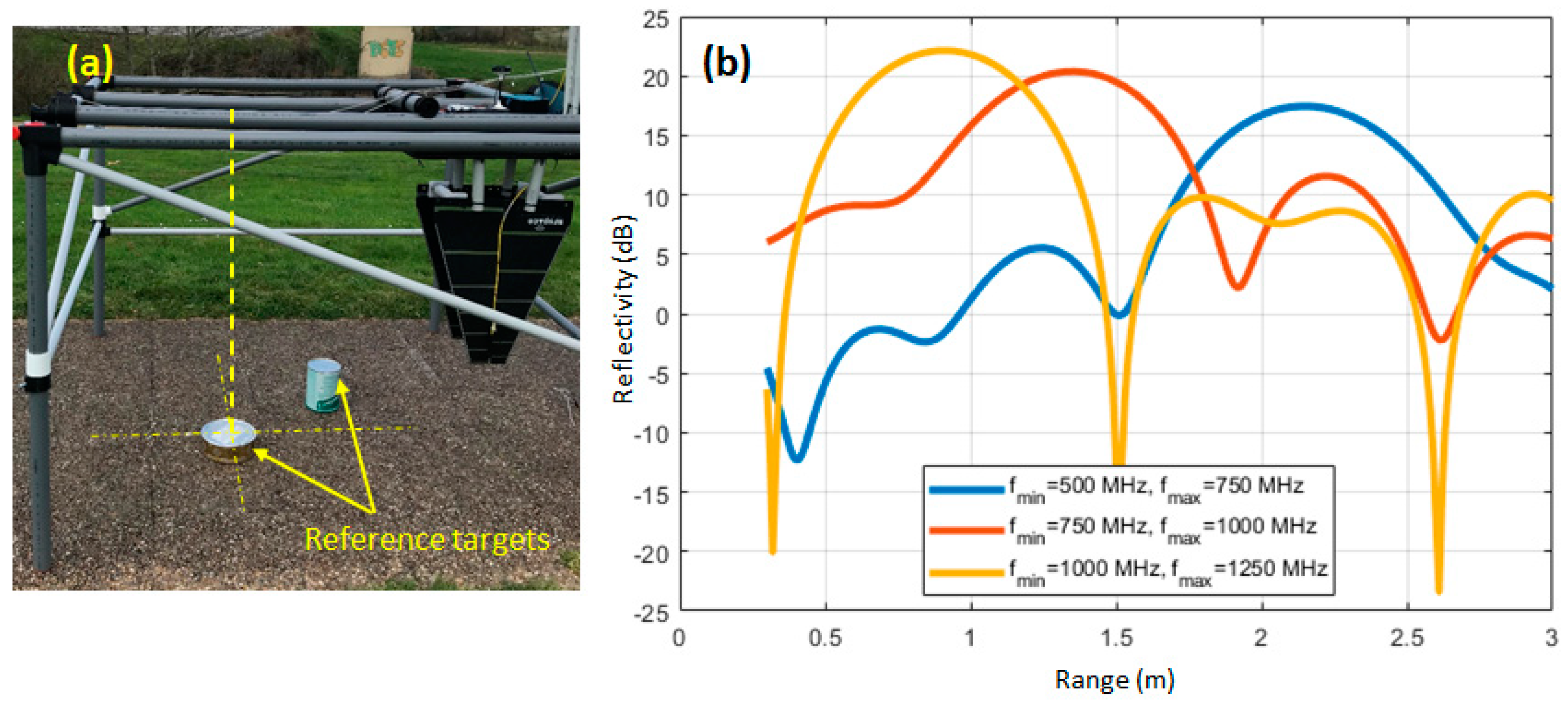
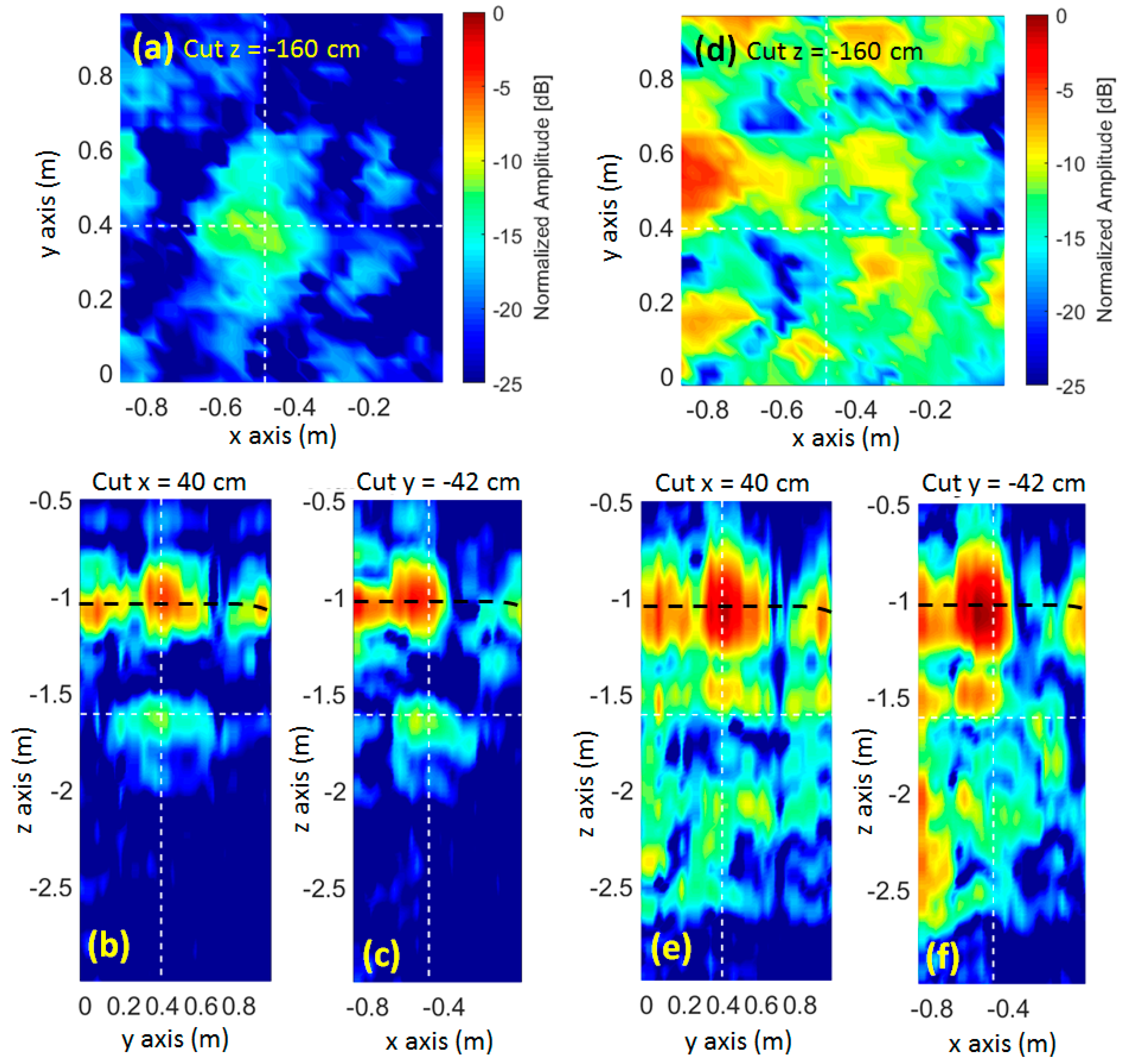
3.3. Testing of Antennas Exhibiting Large Displacement of the Phase Center
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Jol, H.M. Ground Penetrating Radar Theory and Applications; Elsevier Science: Amsterdam, The Netherlands, 2009. [Google Scholar]
- Santos-Assunçao, S.; Perez-Gracia, V.; Caselles, O.; Clapes, J.; Salinas, V. Assessment of Complex Masonry Structures with GPR Compared to Other Non-Destructive Testing Studies. Remote Sens. 2014, 6, 8220–8237. [Google Scholar] [CrossRef] [Green Version]
- Morris, I.; Abdel-Jaber, H.; Glisic, B. Quantitative Attribute Analyses with Ground Penetrating Radar for Infrastructure Assessments and Structural Health Monitoring. Sensors 2019, 19, 1637. [Google Scholar] [CrossRef] [Green Version]
- Conyers, L.B. Ground-Penetrating Radar Mapping Using Multiple Processing and Interpretation Methods. Remote Sens. 2016, 8, 562. [Google Scholar] [CrossRef] [Green Version]
- Ribolini, A.; Bini, M.; Isola, I.; Coschino, F.; Baroni, C.; Salvatore, M.C.; Zanchetta, G.; Fornaciari, A. GPR versus Geoarchaeological Findings in a Complex Archaeological Site (Badia, Pozzeveri, Italy). Archaeol. Prospection. 2016, 24. [Google Scholar] [CrossRef]
- Lippl, S.; Blindow, N.; Fürst, J.J.; Marinsek, S.; Seehaus, T.C.; Braun, M.H. Uncertainty Assessment of Ice Discharge Using GPR-Derived Ice Thickness from Gourdon Glacier, Antarctic Peninsula. Geosciences 2020, 10, 12. [Google Scholar] [CrossRef] [Green Version]
- Hislop, G. Limitations of characterizing layered earth with off-ground GPR. J. Geophys. Eng. 2016, 13, S1–S8. [Google Scholar] [CrossRef]
- De Chiara, F.; Fontul, S.; Fortunato, E. GPR Laboratory Tests for Railways Materials Dielectric Properties Assessment. Remote Sens. 2014, 6, 9712–9728. [Google Scholar] [CrossRef] [Green Version]
- Kwang, H.K.; Gyubin, J.; Kyungmi, P.; Kangwook, K. GPR-Based Landmine Detection and Identification Using Multiple Features. Int. J. Antennas Propag. 2012, 8226404, 7. [Google Scholar]
- Lombardi, F.; Lualdi, M.; Picetti, F.; Bestagini, P.; Janszen, G.; Di Landro, L.A. Ballistic Ground Penetrating Radar Equipment for Blast-Exposed Security Applications. Remote Sens. 2020, 12, 717. [Google Scholar] [CrossRef] [Green Version]
- Núñez-Nieto, X.; Solla, M.; Gómez-Pérez, P.; Lorenzo, H. GPR Signal Characterization for Automated Landmine and UXO Detection Based on Machine Learning Techniquse. Remote Sens. 2014, 6, 9729–9748. [Google Scholar] [CrossRef] [Green Version]
- Daniels, D.J. A review of GPR for landmine detection. Sens. Imaging Int. J. 2006, 7, 90–123. [Google Scholar] [CrossRef]
- Przemyslaw, K.; Godziuk, A.; Kapruziak, M.; Olech, B. Fast Analysis of C-Scans From Ground Penetrating Radar via 3-D Haar-Like Features With Application to Landimne Detection. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3996–4009. [Google Scholar]
- Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Las Heras, F. Autonomous Airborne 3D SAR Imaging System for Subsurface Sensing: UWB-GPR on Board a UAV for Landmine and IED Detection. Remote Sens. 2019, 11, 2357. [Google Scholar] [CrossRef] [Green Version]
- Šipoš, D.; Gleich, D. A Lightweight and Low-Power UAV-Borne Ground Penetrating Radar Design for Landmine Detection. Sensors 2020, 20, 2234. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Colorado, J.; Perez, M.; Mondragon, I.; Mendez, D.; Parra, C.; Devia, C.; Martinez-Moritz, J.; Neira, L. An integrated aerial system for landmine detection: SDR-based Ground Penetrating Radar onboard an autonomous drone. Adv. Robot. 2017, 31, 791–808. [Google Scholar] [CrossRef]
- Schreiber, E.; Heinzel, A.; Peichl, M.; Engel, M.; Wiesbeck, W. Advanced Buried Object Detection by Multichannel, UAV/Drone Carried Synthetic Aperture Radar. In Proceedings of the 2019 13th European Conference on Antennas and Propagation (EuCAP), Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]
- Schartel, M.; Burr, R.; Mayer, W.; Docci, N.; Waldschmidt, C. UAV-Based Ground Penetrating Synthetic Aperture Radar. In Proceedings of the 2018 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Munich, Germany, 15–17 April 2018; pp. 1–4. [Google Scholar]
- Diamanti, N.; Annan, P. Air-launched and ground-coupled GPR data. In Proceedings of the 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 19–24 March 2017. [Google Scholar]
- Comite, D.; Galli, A.; Catapano, I.; Soldovieri, F. Advanced imaging for down-looking contactless GPR systems. In Proceedings of the International Applied Computational Electromagnetics Society Symposium—Italy (ACES), Florence, Italy, 26–30 March 2017. [Google Scholar]
- Gonzalez-Diaz, M.; Garcia-Fernandez, M.; Alvarez-Lopez, Y.; Las Heras, F. Improvement of GPR SAR-based techniques for accurate detection and imaging of buried objects. IEEE Trans. Instrum. Meas. 2019. [Google Scholar] [CrossRef] [Green Version]
- Ardekani, S.; Lambot, S. Full-wave calibration of time- and frequency-domain Ground-Penetrating Radar in far-field conditions. IEEE Trans. Geosci. Remote Sens. 2013, 52, 664–668. [Google Scholar] [CrossRef]
- Zhang, Y.; Orfeo, D.; Burns, D.; Miller, J.; Huston, D.; Tian, X. Buried nonmetallic object detection using bistatic ground penetrating radar with variable antenna elevation angle and height. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, and Civil Infrastructure, Portland, OR, USA, 26–29 March 2017; p. 10169. [Google Scholar] [CrossRef]
- Topcon B111 Receiver. Available online: https://www.topconpositioning.com/oem-components-technology/gnss-components/b111 (accessed on 9 May 2020).
- Johansson, E.M.; Mast, J.E. Three-dimensional ground-penetrating radar imaging using synthetic aperture time-domain focusing. In Proceedings of the International Symposium on Optics, Imaging, and Instrumentation, International Society for Optics and Photonics, San Diego, CA, USA, 14 September 1994. [Google Scholar]
- TSA-600 Ultra-Wideband PCB Tapered Slot Antenna. Available online: http://rfspace.com/RFSPACE/Antennas_files/TSA600.pdf (accessed on 9 May 2020).
- LPDAMAX Wideband PCB Log Periodic Antenna. Available online: http://rfspace.com/RFSPACE/Antennas_files/LPDA-MAX.pdf (accessed on 10 May 2020).
- Crocker, D.A.; Scott, W.R., Jr. Compensation of Dispersion in Sinuous Antennas for Polarimetric Ground Penetrating Radar Applications. Remote Sens. 2019, 11, 1937. [Google Scholar] [CrossRef] [Green Version]
- Miller, T.; Borchers, B.; Hendrickx, J.M.H.; Hong, S.-H.; Lensen, H.A.; Schwering, P.B.W.; Rhebergen, J. Effect of soil moisture on landmine detection using Ground Penetrating Radar. In Proceedings of the SPIE, Voulme 4742, Detection and Remediation Technologies for Mines and Minelike Targets VII. Event: AeroSense 2002, Orlando, FL, USA, 1–5 April 2002. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Target (size, cm) | Depth (cm) | Soil | GPR Antennas (Working BW) | Reflectivity |
|---|---|---|---|---|---|
| 3.1 | Mortar grenade (30 × 8) | 15 | Loamy (εr ∈ [5.0, 7.0], moisture ∈ [30, 50]%) | Vivaldi 600–3000 MHz | −10 dB |
| 3.1. | Hole filled with loamy soil, no target in it | 20 | Loamy (εr ∈ [5.0, 7.0], moisture ∈ [30, 50]%) | Vivaldi 600–3000 MHz | −20 dB |
| 3.1 | Plastic landmine (Ø 16) | 15 | Loamy (εr ∈ [5.0, 7.0], moisture ∈ [30, 50]%) | Vivaldi 600–3000 MHz | −13 dB |
| 3.2 | Metallic disk (Ø 18) | 18–20 | Sandy (εr ∈ [2.0, 3.0], moisture < 30%) | Vivaldi 600–3000 MHz | +2 dB |
| 3.2 | Plastic disk (Ø 18) | 16–18 | Sandy (εr ∈ [2.0, 3.0], moisture < 30%) | Vivaldi 600–3000 MHz | −7 dB |
| 3.3 | Metallic box (Ø 20) | 17 | Loamy (εr ∈ [5.0, 7.0], moisture ∈ [30, 50]%) | LPA 400–1200 MHz | −10 dB |
| 3.3 | Metallic box (Ø 20) | 25 | Loamy (εr ∈ [5.0, 7.0], moisture ∈ [30, 50]%) | LPA 400–1200 MHz | −13 dB |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Fernández, M.; Álvarez López, Y.; De Mitri, A.; Castrillo Martínez, D.; Álvarez-Narciandi, G.; Las-Heras Andrés, F. Portable and Easily-Deployable Air-Launched GPR Scanner. Remote Sens. 2020, 12, 1833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111833
García-Fernández M, Álvarez López Y, De Mitri A, Castrillo Martínez D, Álvarez-Narciandi G, Las-Heras Andrés F. Portable and Easily-Deployable Air-Launched GPR Scanner. Remote Sensing. 2020; 12(11):1833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111833
Chicago/Turabian StyleGarcía-Fernández, María, Yuri Álvarez López, Alessandro De Mitri, David Castrillo Martínez, Guillermo Álvarez-Narciandi, and Fernando Las-Heras Andrés. 2020. "Portable and Easily-Deployable Air-Launched GPR Scanner" Remote Sensing 12, no. 11: 1833. https://0-doi-org.brum.beds.ac.uk/10.3390/rs12111833